Принцип работы двигателя внутреннего сгорания
Современный автомобиль, чаще всего, приводится в движение двигателем внутреннего сгорания. Таких двигателей существует огромное множество. Различаются они объемом, количеством цилиндров, мощностью, скоростью вращения, используемым топливом (дизельные, бензиновые и газовые ДВС). Но, принципиально, устройство двигателя внутреннего сгорания, похоже.
Как работает двигатель и почему называется четырехтактным двигателем внутреннего сгорания? Про внутреннее сгорание понятно. Внутри двигателя сгорает топливо. А почему 4 такта двигателя, что это такое? Действительно, бывают и двухтактные двигатели. Но на автомобилях они используются крайне редко.
Четырехтактным двигатель называется из-за того, что его работу можно разделить на четыре, равные по времени, части. Поршень четыре раза пройдет по цилиндру – два раза вверх и два раза вниз. Такт начинается при нахождении поршня в крайней нижней или верхней точке. У автомобилистов-механиков это называется верхняя мертвая точка (ВМТ) и нижняя мертвая точка (НМТ).
Первый такт — такт впуска
Первый такт, он же впускной, начинается с ВМТ (верхней мертвой точки). Двигаясь вниз, поршень всасывает в цилиндр топливовоздушную смесь. Работа этого такта происходит при открытом клапане впуска. Кстати, существует много двигателей с несколькими впускными клапанами. Их количество, размер, время нахождения в открытом состоянии может существенно повлиять на мощность двигателя. Есть двигатели, в которых, в зависимости от нажатия на педаль газа, происходит принудительное увеличение времени нахождения впускных клапанов в открытом состоянии. Это сделано для увеличения количества всасываемого топлива, которое, после возгорания, увеличивает мощность двигателя. Автомобиль, в этом случае, может гораздо быстрее ускориться.
Второй такт — такт сжатия
Следующий такт работы двигателя – такт сжатия. После того как поршень достиг нижней точки, он начинает подниматься вверх, тем самым, сжимая смесь, которая попала в цилиндр в такт впуска. Топливная смесь сжимается до объемов камеры сгорания. Что это за такая камера? Свободное пространство между верхней частью поршня и верхней частью цилиндра при нахождении поршня в верхней мертвой точке называется камерой сгорания. Клапаны, в этот такт работы двигателя закрыты полностью. Чем плотнее они закрыты, тем сжатие происходит качественнее. Большое значение имеет, в данном случае, состояние поршня, цилиндра, поршневых колец. Если имеются большие зазоры, то хорошего сжатия не получится, а соответственно, мощность такого двигателя будет гораздо ниже. Компрессию можно проверить специальным прибором. По величине компрессии можно сделать вывод о степени износа двигателя.
Третий такт — рабочий ход
Третий такт – рабочий, начинается с ВМТ. Рабочим он называется неслучайно. Ведь именно в этом такте происходит действие, заставляющее автомобиль двигаться. В этом такте в работу вступает система зажигания. Почему эта система так называется? Да потому, что она отвечает за поджигание топливной смеси, сжатой в цилиндре, в камере сгорания. Работает это очень просто – свеча системы дает искру. Справедливости ради, стоит заметить, что искра выдается на свече зажигания за несколько градусов до достижения поршнем верхней точки. Эти градусы, в современном двигателе, регулируются автоматически «мозгами» автомобиля.
После того как топливо загорится, происходит взрыв – оно резко увеличивается в объеме, заставляя поршень двигаться вниз. Клапаны в этом такте работы двигателя, как и в предыдущем, находятся в закрытом состоянии.
Четвертый такт — такт выпуска
Четвертый такт работы двигателя, последний – выпускной. Достигнув нижней точки, после рабочего такта, в двигателе начинает открываться выпускной клапан. Таких клапанов, как и впускных, может быть несколько. Двигаясь вверх, поршень через этот клапан удаляет отработавшие газы из цилиндра – вентилирует его. От четкой работы клапанов зависит степень сжатия в цилиндрах, полное удаление отработанных газов и необходимое количество всасываемой топливно-воздушной смеси.
После четвертого такта наступает черед первого. Процесс повторяется циклически. А за счет чего происходит вращение – работа двигателя внутреннего сгорания все 4 такта, что заставляет поршень подниматься и опускаться в тактах сжатия, выпуска и впуска? Дело в том, что не вся энергия, получаемая в рабочем такте, направляется на движение автомобиля. Часть энергии идет на раскручивание маховика. А он, под действием инерции, крутит коленчатый вал двигателя, перемещая поршень в период «нерабочих» тактов.
|
РЕКОМЕНДУЕМ ТАКЖЕ ПРОЧИТАТЬ:
|
Принцип работы реактивного двигателя. Описание и устройство :: SYL.ru
Реактивное движение – это такой процесс, при котором от определенного тела с некоторой скоростью отделяется одна из его частей. Сила, которая возникает при этом, работает сама по себе, без малейшего контакта с внешними телами. Реактивное движение стало толчком к созданию реактивного двигателя. Принцип работы его основан именно на этой силе. Как же действует такой двигатель? Попробуем разобраться.
Исторические факты
Идею использования реактивной тяги, которая позволила бы преодолеть силу притяжения Земли, выдвинул в 1903 году феномен российской науки – Циолковский. Он опубликовал целое исследование на данную тему, но оно не было воспринято серьезно. Константин Эдуардович, пережив смену политического строя, потратил годы трудов, чтобы доказать всем свою правоту.

Сегодня очень много слухов о том, что первым в данном вопросе был революционер Кибальчич. Но завещание этого человека к моменту публикации трудов Циолковского было погребено вместе с Кибальчичем. Кроме того, это был не полноценный труд, а лишь эскизы и наброски – революционер не смог подвести надежную базу под теоретические выкладки в своих работах.
Как действует реактивная сила?
Чтобы понять принцип работы реактивного двигателя, нужно понимать, как действует эта сила.
Итак, представим выстрел из любого огнестрельного оружия. Это наглядный пример действия реактивной силы. Струя раскаленного газа, который образовался в процессе сгорания заряда в патроне, отталкивает оружие назад. Чем мощнее заряд, тем сильнее будет отдача.
А теперь представим процесс зажигания горючей смеси: он проходит постепенно и непрерывно. Именно так выглядит принцип работы прямоточного реактивного двигателя. Подобным образом работает ракета с твердотопливным реактивным двигателем – это наиболее простая из его вариаций. С ней знакомы даже начинающие ракетомоделисты.
В качестве горючего для реактивных двигателей вначале применяли дымный порох. Реактивные двигатели, принцип работы которых был уже более совершенен, требовали топлива с основой из нитроцеллюлозы, которая растворялась в нитроглицерине. В больших агрегатах, запускающих ракеты, выводящие шаттлы на орбиту, сегодня используют специальную смесь полимерного горючего с перхлоратом аммония в качестве окислителя.
Принцип действия РД
Теперь стоит разобраться с принципом работы реактивного двигателя. Для этого можно рассмотреть классику – жидкостные двигатели, которые практически не изменились со времен Циолковского. В этих агрегатах применяется топливо и окислитель.
В качестве последнего используется жидкий кислород либо же азотная кислота. В качестве горючего применяют керосин. Современные жидкостные двигатели криогенного типа потребляют жидкий водород. Он при окислении кислородом увеличивает удельный импульс (на целых 30 процентов). Идея о том, что можно использовать водород, также родилась в голове Циолковского. Однако на тот момент по причине чрезвычайной взрывоопасности пришлось искать другое горючее.
Принцип работы состоит в следующем. Компоненты поступают в камеру сгорания из двух отдельных баков. После смешивания они превращаются в массу, которая при сгорании выделяет огромное количество тепла и десятки тысяч атмосфер давления. Окислитель подается в камеру сгорания. Топливная смесь по мере прохождения между сдвоенными стенками камеры и сопла охлаждает эти элементы. Далее горючее, подогретое стенками, попадет через огромное количество форсунок в зону воспламенения. Струя, которая формируется при помощи сопла, вырывается наружу. За счет этого и обеспечивается толкающий момент.
Кратко принцип работы реактивного двигателя можно сравнить с паяльной лампой. Однако последняя устроена значительно проще. В схеме ее работы нет различных вспомогательных систем двигателя. А это компрессоры, нужные для создания давления впрыска, турбины, клапана, а также прочие элементы, без которых реактивный двигатель просто невозможен.

Несмотря на то что жидкостные двигатели потребляют очень много горючего (расход топлива составляет примерно 1000 грамм на 200 килограммов груза), их до сих пор используют в качестве маршевых агрегатов для ракеты-носителей и маневровых для орбитальных станций, а также других аппаратов космического назначения.
Устройство
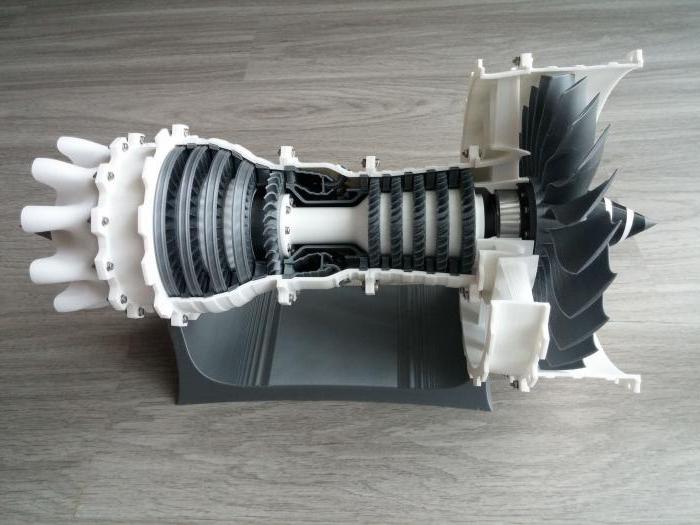
Устроен типичный реактивный двигатель следующим образом. Основные его узлы — это:
— компрессор;
— камера для сгорания;
— турбины;
— выхлопная система.
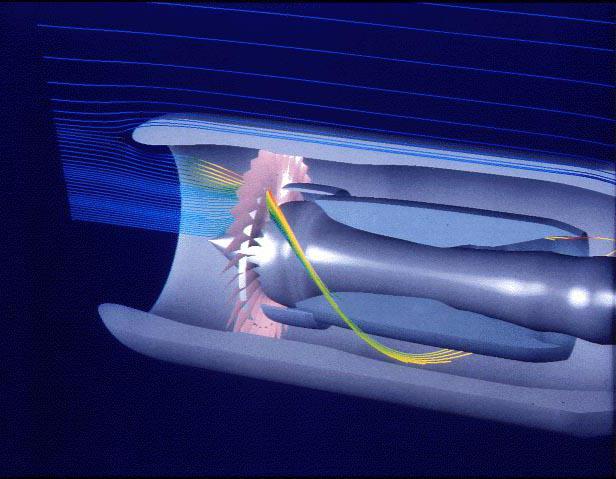
Рассмотрим данные элементы более подробно. Компрессор представляет собой несколько турбин. Их задача – всасывать и сжимать воздух по мере того, как он проходит через лопасти. В процессе сжатия повышается температура и давление воздуха. Часть такого сжатого воздуха подается в камеру сгорания. В ней воздух смешивается с топливом и происходит воспламенение. Этот процесс еще больше увеличивает тепловую энергию.
Смесь выходит из камеры сгорания на высокой скорости, а затем расширяется. Далее она следует еще через одну турбину, лопасти которой вращаются за счет воздействия газов. Эта турбина, соединяясь с компрессором, находящимся в передней части агрегата, и приводит его в движение. Воздух, нагретый до высоких температур, выходит через выпускную систему. Температура, уже достаточно высокая, продолжает расти за счет эффекта дросселирования. Затем воздух выходит окончательно.
Мотор самолета
В самолетах также используются эти двигатели. Так, например, в огромных пассажирских лайнерах устанавливают турбореактивные агрегаты. Они отличаются от обычных наличием двух баков. В одном находится горючее, а в другом – окислитель. В то время как турбореактивный мотор несет только топливо, а в качестве окислителя используется воздух, нагнетаемый из атмосферы.
Турбореактивный мотор
Принцип работы реактивного двигателя самолета основан на той же реактивной силе и тех же законах физики. Самая важная часть – это лопасти турбины. От размеров лопасти зависит итоговая мощность.

Именно благодаря турбинам вырабатывается тяга, которая нужная для ускорения самолетов. Каждая из лопастей в десять раз мощнее обыкновенного автомобильного ДВС. Турбины установлены после камеры сгорания там, где наиболее высокое давление. А температура здесь может достигать полутора тысяч градусов.
Двухконтурный РД
Эти агрегаты имеют массу преимуществ перед турбореактивными. Например, значительно меньший расход топлива при той же мощности.
Но сам двигатель имеет более сложную конструкцию и больший вес.
Да и принцип работы двухконтурного реактивного двигателя немного другой. Воздух, захватываемый турбиной, частично сжимается и подается в первый контур на компрессор и на второй – к неподвижным лопастям. Турбина при этом работает в качестве компрессора низкого давления. В первом контуре двигателя воздух сжимается и подогревается, а затем посредством компрессора высокого давления подается в камеру сгорания. Здесь происходит смесь с топливом и воспламенение. Образуются газы, которые подаются на турбину высокого давления, за счет чего и вращаются лопасти турбины, подающие, в свою очередь, вращательное движение на компрессор высокого давления. Затем газы проходят через турбину низкого давления. Последняя приводит в действие вентилятор и, наконец, газы попадают наружу, создавая тягу.
Синхронные РД
Это электрические моторы. Принцип работы синхронного реактивного двигателя аналогичен работе шагового агрегата. Переменный ток подается на статор и создает магнитное поле вокруг ротора. Последний вращается за счет того, что пытается минимизировать магнитное сопротивление. Эти моторы не имеют отношения к освоению космоса и запуску шаттлов.
Схемы устройства и принцип действия
Двигателем внутреннего сгорания называется тепловой двигатель поршневого типа, в котором химическая энергия топлива преобразуется в тепловую непосредственно внутри рабочего цилиндра. В результате химической реакции топлива с кислородом воздуха образуются газообразные продукты сгорания с высокими давлением и температурой, которые являются рабочим телом двигателя. Продукты сгорания оказывают давление на поршень и вызывают его перемещение. Возвратно-поступательное движение поршня с помощью кривошипно-шатунного механизма превращается во вращательное движение коленчатого вала.
Двигатели внутреннего сгорания работают по одному из трех циклов: изохорному (цикл Отто), изобарному (цикл Дизеля) и смешанному (цикл Тринклера), различающихся характером протекания процесса сообщения тепла рабочему телу. В смешанном цикле часть тепла сообщается при постоянном объеме, а остальная часть при постоянном давлении. Отвод тепла во всех циклах совершается по изохоре.
Совокупность последовательных и периодически повторяющихся процессов, необходимых для движения поршня — наполнение цилиндра, сжатие, сгорание с последующим расширением газов и очистка цилиндра от продуктов сгорания — называется рабочим циклом двигателя. Часть цикла, проходящая за один ход поршня, называется тактом.
Двигатели внутреннего сгорания делятся на четырехтактные и двухтактные; в четырехтактных двигателях рабочий цикл совершается за четыре хода поршня, а в двухтактных — за два.
Судовые двигатели внутреннего сгорания в основном работают по смешанному циклу. Крайние предельные положения поршня в цилиндре называются соответственно верхней и нижней мертвыми точками (в. м. т., н. м. т.). Расстояние по оси цилиндра, проходимое поршнем от одного до другого крайнего положения, называется ходом поршня
Отношение полного объема цилиндра к объему камеры сжатия называется степенью сжатия ? = Va / Vc.
Величина степени сжатия зависит от типа двигателя. Для судовых дизелей степень сжатия равна 12—18. Главными конструктивными характеристиками двигателя являются диаметр цилиндра, ход поршня, число цилиндров и габаритные размеры.
Четырехтактный двигатель.
На рис. 125 показана схема устройства четырехтактного дизеля. Фундаментная рама 15 дизеля покоится на судовом фундаменте 1. Блок цилиндров 11 закрепляется на станине двигателя 14. Поршень 9 под действием газов совершает возвратно-поступательное движение по зеркалу цилиндровой втулки 10 и с помощью шатуна
Рабочий цикл в четырехтактном двигателе происходит за два оборота коленчатого вала — за четыре хода (такта) поршня. Из четырех ходов (тактов) три хода (такта) являются подготовительными, а один рабочим. Каждый такт носит название основного процесса, происходящего во время данного такта.
Первый такт — впуск. При движении поршня вниз (рис. 126) над поршнем в цилиндре создается разрежение, и через принудительно открытый впускной клапан а атмосферный воздух заполняет цилиндр. Для лучшего заполнения цилиндра свежим зарядом воздуха впускной клапан а открывается несколько раньше, чем поршень достигнет в. м. т.—точка 1; имеет место предварение впуска (15—30° по углу поворота коленчатого вала). Заканчивается впуск воздуха в цилиндр в точке 2. Впускной клапан а закрывается с углом запаздывания 10—30° после н. м. т. возможность использовать инерцию входящего с большой скоростью воздуха, что приводит к более полной зарядке цилиндра. Продолжительность впуска соответствует углу поворота коленчатого вала на 220—250° и на рисунке показана заштрихованным углом 1—2, а па диаграмме р—? — линией впуска 1—2.
Второй такт — сжатие. С момента закрытия впускного клапана а (точка 2) при движении поршня вверх начинается сжатие. Объем уменьшается, температура и давление воздуха увеличиваются. Продолжительность сжатия составляет угол 140—160° поворота коленчатого вала и заканчивается в точке 3. Давление в конце сжатия достигает 3—4,5 Мн/м2, а температура 800—1100° К. Высокая температура заряда воздуха обеспечивает самовоспламенение топлива. В конце хода сжатия, когда поршень .немного не дошел до в. м. т. (точка 3), производится впрыск топлива через форсунку б. Опережение подачи топлива (угол предварения 10—30°) дает возможность к приходу поршня в в. м. т. подготовить рабочую смесь к самовоспламенению.
Третий такт — рабочий ход. Происходит горение топлива и расширение продуктов сгорания. Продолжительность сгорания топлива составляет 40—60° поворота коленчатого вала (процесс 3—4 на рисунке). В конце горения внутренняя энергия газов увеличивается, давление газов достигает значительной величины 5—8 Мн/м2, а температура 1500—2000° К. Точка 4 — начало расширения газов. Под давлением газов поршень движется вниз, совершая полезную механическую работу. В конце расширения (угол опережения 20—40° до н. м. т.) — точка 5 — открывается выпускной клапан в, давление в цилиндре резко падает и по достижении поршнем н. м. т. оказывается равным 0,1—0,11 Мн/м2, а температура 600—800° К. Предварение выпуска обеспечивает минимальное сопротивление движению поршня вверх в последующем такте. Рабочий ход совершается за 160—180° угла поворота коленчатого вала.
Четвертый такт — выпуск. Продолжается от точки 5 до точки 6. При выпуске поршень, двигаясь вверх от н. м. т., выталкивает отработавшие продукты сгорания. Выпускной клапан закрывается с некоторым запозданием (на 10—30° угла поворота коленчатого вала после в. м. т.). Это улучшает удаление отработавших продуктов горения за счет отсасывающего действия газов, тем более что в это время впускной клапан уже открыт. Такое положение клапанов называется «перекрытием клапанов». Перекрытие клапанов обеспечивает более совершенное удаление продуктов сгорания. Выпуск осуществляется в течение 225—250° угла поворота коленчатого вала.
Двухтактный двигатель.
На рис. 127 показана схема работы двухтактного дизеля. Газораспределение в двухтактных двигателях осуществляется через продувочные окна П и выпускные окна В. Продувочные окна соединены с продувочным ресивером Р, в который продувочным насосом Н нагнетается чистый воздух под давлением 0,12—0,16 Мн/м2. Выпускные окна, несколько выше расположенные, чем продувочные, соединяются с выпускным коллектором. Топливо подается в цилиндр форсункой Ф. Рабочий цикл двухтактного двигателя осуществляется за два хода поршня, за один оборот коленчатого вала. Открытие и закрытие выпускных и продувочных окон производится поршнем.
Рассмотрим последовательность процессов в цилиндре.
Первый такт — горение, расширение, выпуск и продувка. Поршень движется вниз от в. м. т. к н. м. т. В начале такта происходит бурное горение с повышением давления газов до 5—10 Мн/м2 и температуры до 1700—1900° К для тихоходных двигателей и 1800—2000° К для быстроходных. Горение заканчивается в точке 4 и затем происходит расширение продуктов сгорания (участок 4—5) до давления 0,25—0,6 Мн/м2 и температуры 900—1200° К. При положении мотыля в точке 5 (за 50—70° до н. м. т.) открываются выпускные окна, давление в цилиндре резко падает и начинается выпуск отработавших газов выпускного коллектора в атмосферу. Высота продувочных окон подбирается таким образом, чтобы к моменту их открытия давление газов в цилиндре было бы близко к давлению продувочного воздуха в продувочном ресивере. После открытия продувочных окон (точка 6) продувочный воздух, поступая в цилиндр, вытесняет продукты сгорания через выпускные окна, при этом часть воздуха уходит с отработавшими газами. При открытых продувочных окнах происходит принудительная очистка цилиндра и заполнение его свежим зарядом; этот процесс называется продувкой.
Второй такт. Процесс продувки продолжается также при движении поршня вверх от н. м. т. до закрытия продувочных окон (точка 1). После закрытия поршнем выпускных окон (точка 2) процесс выпуска заканчивается и начинается процесс сжатия свежего заряда воздуха. В конце сжатия (в. м. т.) давление воздуха равно 3,5—5 Мн/м2, а температура составляет 750—800° К. Высокая температура воздуха в конце сжатия обеспечивает самовоспламенение топлива. Затем цикл повторяется.
По тем же соображениям, что и для четырехтактных дизелей, топливо в цилиндр подается с опережением в 10—20° поворота коленчатого вала до в. м. т. (точка 3).
В настоящее время на судах применяют как двухтактные, так и четырехтактные дизели. Для крупнотоннажных грузовых и пассажирских судов основным является двухтактный двигатель. Тихоходные двухтактные крейцкопфного типа дизеля долговечны, отличаются высокой экономичностью, но имеют большой вес и габариты. При одной и той же частоте вращения и одинаковых размерах цилиндров мощность двухтактного двигателя теоретически вдвое больше мощности четырехтактного. Увеличение мощности двухтактного двигателя обусловлено сгоранием вдвое большего количества топлива, чем в четырехтактном, но так как объем рабочего цилиндра (из-за наличия выпускных и продувочных окон) используется неполностью, а часть мощности (4—10%) затрачивается на приведение в действие продувочного насоса, то фактическое превышение мощности в двухтактном двигателе над мощностью четырехтактного составляет 70—80%.
Четырехтактный двигатель при одинаковых мощности и частоте вращения с двухтактным имеет большие размеры и вес. Двухтактный двигатель при одинаковых частоте вращения и числе цилиндров с четырехтактным вследствие удвоенного числа рабочих циклов работает более равномерно. Минимальное число цилиндров, обеспечивающее надежный пуск для двухтактного двигателя — четыре, а для четырехтактного — шесть.
Отсутствие клапанов и приводов к ним у двухтактного двигателя со щелевой продувкой упрощает его конструкцию. Однако на изготовление деталей требуются более прочные материалы, так как двухтактные двигатели работают при более высоких температурных условиях.
В двухтактных двигателях очистка, продувка и зарядка свежим воздухом цилиндра осуществляется на протяжении части одного хода, поэтому качество этих процессов ниже, чем у четырехтактного двигателя.
Четырехтактные двигатели удобнее в отношении повышения их мощности путем наддува. Для них используют более простую схему наддува, теплонапряженность цилиндров меньше, чем у двухтактных дизелей. Для современных четырехтактных дизелей с газотурбинным наддувом удельный эффективный расход топлива составляет 0,188—0,190 кг/(квт ? ч), а для двухтактных тихоходных дизелей с наддувом 0,204—0,210 кг/(квт?ч).
Вентильный двигатель — Википедия
 Рис. 1. Принцип работы трёхфазного вентильного двигателя
Рис. 1. Принцип работы трёхфазного вентильного двигателяВентильный электродвигатель (ВД) — это разновидность электродвигателя постоянного тока, у которого щеточно-коллекторный узел (ЩКУ) заменен полупроводниковым коммутатором, управляемым датчиком положения ротора[1].
Механическая и регулировочная характеристики вентильного двигателя линейны и идентичны механической и регулировочной характеристикам электродвигателя постоянного тока. Как и электродвигатели постоянного тока, вентильные двигатели работают от сети постоянного тока. ВД можно рассматривать как двигатель постоянного тока, в котором щёточно-коллекторный узел заменён электроникой, что подчёркивается словом «вентильный», то есть «управляемый силовыми ключами» (вентилями). Фазные токи вентильного двигателя имеют синусоидальную форму. Как правило, в качестве усилителя мощности применяется автономный инвертор напряжения с широтно-импульсной модуляцией (ШИМ).
Вентильный двигатель следует отличать от бесколлекторного двигателя постоянного тока (БДПТ), который имеет трапецеидальное распределение магнитного поля в зазоре и характеризуется прямоугольной формой фазных напряжений. Структура БДПТ проще, чем структура ВД (отсутствует преобразователь координат, вместо ШИМ используется 120- или 180-градусная коммутация, реализация которой проще ШИМ).
В русскоязычной литературе двигатель называют вентильным, если противо-ЭДС управляемой синхронной машины синусоидальная, а бесколлекторным двигателем постоянного тока, если противо-ЭДС трапецеидальная.
В англоязычной литературе такие двигатели обычно не рассматриваются отдельно от электропривода и упоминаются под аббревиатурами PMSM (Permanent Magnet Synchronous Motor) или BLDC (Brushless Direct Current Motor). Стоит отметить, что аббревиатура PMSM в англоязычной литературе чаще используется для обозначения самих синхронных машин с постоянными магнитами и с синусоидальной формой фазных противо-ЭДС, в то время как аббревиатура BLDC аналогична русской аббревиатуре БДПТ и относится к двигателям с трапецеидальной формой противо-ЭДС (если иная форма не оговорена специально).
Вообще говоря, вентильный двигатель не является электрической машиной в традиционном понимании, поскольку его проблематика затрагивает ряд вопросов, связанных с теорией электропривода и систем автоматического управления: структурная организация, использование датчиков и электронных компонентов, а также программное обеспечение.
Вентильные двигатели, сочетающие в себе надёжность машин переменного тока с хорошей управляемостью машин постоянного тока, являются альтернативой двигателям постоянного тока, которые характеризуются рядом изъянов, связанных со ЩКУ, таких как искрение, помехи, износ щёток, плохой теплоотвод якоря и пр. Отсутствие ЩКУ позволяет применять ВД в тех приложениях, где использование ДПТ затруднено или невозможно.
 Рис. 2. Структура двухфазного вентильного двигателя с синхронной машиной с постоянными магнитами на роторе. ПК — преобразователь координат, УМ — усилитель мощности,
Рис. 2. Структура двухфазного вентильного двигателя с синхронной машиной с постоянными магнитами на роторе. ПК — преобразователь координат, УМ — усилитель мощности,СЭМП — синхронный электромеханический преобразователь (синхронная машина), ДПР — датчик положения ротора.
Двигатель состоит из постоянного магнита-ротора, вращающегося в магнитном поле катушек статора, по которым проходит ток, коммутируемый ключами (вентилями), управляемыми микроконтроллером. Микроконтроллер переключает катушки таким образом, чтобы взаимодействие их поля с полем ротора создавало крутящий момент при любом его положении.
На входы преобразователя координат (ПК) поступают напряжения постоянного тока uq{\displaystyle u_{q}}, действие которого аналогично напряжению якоря двигателя постоянного тока, и ud{\displaystyle u_{d}}, аналогичное напряжению возбуждения двигателя постоянного тока (аналогия действует при рассмотрении схемы независимого возбуждения двигателя постоянного тока).
Сигналы ud,uq{\displaystyle u_{d},u_{q}}, представляют собой проекции вектора напряжения управления Uy→={ud,uq}{\displaystyle {\vec {U_{y}}}=\{u_{d},u_{q}\}} на оси вращающейся системы координат {d,q}{\displaystyle \{d,q\}}, связанной с ротором ВД (а точнее — с вектором потока ротора). Преобразователь координат осуществляет преобразование проекций ud,uq{\displaystyle u_{d},u_{q}} в проекции uα,uβ{\displaystyle u_{\alpha },u_{\beta }} неподвижной системы координат {α,β}{\displaystyle \{\alpha ,\beta \}}, связанной со статором.
Как правило, в системах управления электропривода задаётся ud=0{\displaystyle u_{d}=0}[3], при этом уравнения преобразования координат принимают вид[4]:
uα=−uq⋅sinθ,{\displaystyle u_{\alpha }=-u_{q}\cdot \sin {\theta },}
uβ={\displaystyle u_{\beta }=} uq⋅cosθ,{\displaystyle u_{q}\cdot \cos {\theta },}
где θ{\displaystyle \theta } — угол поворота ротора (и системы вращающихся координат) относительно оси α{\displaystyle \alpha } неподвижной системы координат. Для измерения мгновенного значения угла θ{\displaystyle \theta } на валу ВД устанавливается датчик положения ротора (ДПР).
По сути, uq{\displaystyle u_{q}} является в этом случае заданием значения амплитуды фазных напряжений. А ПК, осуществляя позиционную модуляцию сигнала uq{\displaystyle u_{q}}, формирует гармонические сигналы uα,uβ{\displaystyle u_{\alpha },u_{\beta }}, которые усилитель мощности (УМ) преобразует в фазные напряжения uA,uB{\displaystyle u_{A},u_{B}}. Синхронный двигатель в составе вентильного двигателя часто называют синхронным электромеханическим преобразователем (СЭМП).
Как правило, электронная часть ВД коммутирует фазы статора синхронной машины так, чтобы вектор магнитного потока статора был ортогонален вектору магнитного потока ротора (т. н. векторное управление). При соблюдении ортогональности потоков статора и ротора обеспечивается поддержание максимального вращающего момента ВД в условиях изменения частоты вращения, что предотвращает выпадение ротора из синхронизма и обеспечивает работу синхронной машины с максимально возможным для неё КПД. Для определения текущего положения потока ротора вместо датчика положения ротора могут использоваться токовые датчики (косвенное измерение положения).
Электронная часть современного ВД содержит микроконтроллер и транзисторный мост, а для формирования фазных токов используется принцип широтно-импульсной модуляции (ШИМ). Микроконтроллер отслеживает соблюдение заданных законов управления, а также производит диагностику системы и её программную защиту от аварийных ситуаций.
Иногда датчик положения ротора отсутствует, а положение оценивается системой управления по измерениям токовых датчиков с помощью наблюдателей (т. н. «бездатчиковое» управление ВД). В таких случаях за счёт удаления дорогостоящего и зачастую громоздкого датчика положения уменьшается цена и массо-габаритные показатели электропривода с ВД, однако усложняется управление, снижается точность определения положения и скорости.
В приложениях средней и большой мощности в систему могут дополнительно включаться электрические фильтры для смягчения негативных эффектов ШИМ: перенапряжений на обмотках, подшипниковых токов и снижения КПД. Впрочем, это характерно для всех типов двигателей.
Вентильные двигатели призваны объединить в себе лучшие качества двигателей переменного тока и двигателей постоянного тока. Это обусловливает их достоинства.
Достоинства:
- Широкий диапазон изменения частоты вращения
- Бесконтактность и отсутствие узлов, требующих частого обслуживания (коллектора)
- Возможность использования во взрывоопасной и агрессивной среде
- Большая перегрузочная способность по моменту
- Высокие энергетические показатели (КПД выше 90 %)
- Большой срок службы и высокая надёжность за счёт отсутствия скользящих электрических контактов.
Вентильные двигатели характеризуются и некоторыми недостатками, главный из которых — высокая стоимость. Однако, говоря о высокой стоимости, следует учитывать и тот факт, что вентильные двигатели обычно используются в дорогостоящих системах с повышенными требованиями по точности и надёжности.
Недостатки:
- Высокая стоимость двигателя, обусловленная частым использованием дорогостоящих постоянных магнитов в конструкции ротора. Стоимость электропривода с ВД, однако, сопоставима со стоимостью аналогичного электропривода на основе ДПТ с независимым возбуждением (регулировочные характеристики такого двигателя и ВД сопоставимы). Вообще говоря, в вентильном двигателе может быть использован и ротор с электромагнитным возбуждением, однако это сопряжено с комплексом практических неудобств. В ряде случаев предпочтительным оказывается применение асинхронного двигателя с преобразователем частоты.
- Относительно сложная структура двигателя и управление им.
Конструктивно современные вентильные приводы состоят из электромеханической части (синхронной машины и датчика положения ротора) и из управляющей части (микроконтроллер и силовой мост).
Упоминая о конструкции ВД, полезно иметь в виду и неконструктивный элемент системы — программу (логику) управления.
Синхронная машина, используемая в ВД, состоит из шихтованного (собранного из отдельных электрически изолированных листов электротехнической стали — для снижения вихревых токов) статора, в котором расположена многофазная (обычно двух- или трёхфазная) обмотка, и ротора (обычно на постоянных магнитах).
В качестве датчиков положения ротора в БДПТ применяются датчики Холла, а в ВД — вращающиеся трансформаторы и накапливающие датчики. В т. н. «бездатчиковых» системах информация о положении определяется системой управления по мгновенным значениям фазных токов.
Информация о положении ротора обрабатывается микропроцессором, который, согласно программе управления, вырабатывает управляющие ШИМ-сигналы. Низковольтные ШИМ-сигналы микроконтроллера затем преобразуются усилителем мощности (обычно транзисторным мостом) в силовые напряжения, подаваемые на двигатель.
Совокупность датчика положения ротора и электронного узла в ВД и БДПТ можно с определённой долей достоверности сравнить с щёточно-коллекторным узлом ДПТ. Однако следует помнить, что двигатели редко применяются вне электропривода. Таким образом, электронная аппаратура характерна для ВД почти в той же степени, что и для ДПТ.
Статор[править | править код]
Статор имеет традиционную конструкцию. Он состоит из корпуса, сердечника из электротехнической стали и медной обмотки, уложенной в пазы по периметру сердечника. Обмотка разбита на фазы, которые уложены в пазы таким образом, что пространственно сдвинуты друг относительно друга на угол, определяемый числом фаз. Известно, что для равномерного вращения вала двигателя машины переменного тока достаточно двух фаз. Обычно синхронные машины, применяемые в ВД, трёхфазные, однако встречаются также и ВД с четырёх- и шестифазными обмотками.
Ротор[править | править код]
По расположению ротора вентильные двигатели делятся на внутрироторные (англ. inrunner) и внешнероторные (англ. outrunner).
Ротор изготавливается с использованием постоянных магнитов и имеет обычно от двух до шестнадцати пар полюсов с чередованием северного и южного полюсов.
Для изготовления ротора раньше использовались ферритовые магниты, что определялось их распространённостью и дешевизной. Однако такие магниты характеризуются низким уровнем магнитной индукции. В настоящее время интенсивно используются магниты из сплавов редкоземельных элементов, поскольку они позволяют получить более высокий уровень магнитной индукции и уменьшить размер ротора.
Датчик положения ротора[править | править код]
Датчик положения ротора (ДПР) реализует обратную связь по положению ротора. Его работа может быть основана на разных принципах — фотоэлектрическом, индуктивном, трансформаторном, на эффекте Холла и проч. Наибольшую популярность приобрели датчики Холла и фотоэлектрические датчики, обладающие низкой инерционностью и обеспечивающие малые запаздывания в канале обратной связи по положению ротора.
Обычно фотоэлектрический датчик содержит три неподвижных фотоприёмника, между которыми находится вращающаяся маска с рисками, жёстко закреплённая на валу ротора ВД. Таким образом, ДПР обеспечивает информацию о текущем положении ротора ВД для системы управления.
Система управления[править | править код]
Система управления содержит микроконтроллер, контролирующий силовой инвертор согласно заданной программе управления. В качестве силовых ключей инвертора обычно применяют транзисторы MOSFET (ВД малых и средних мощностей) или IGBT (ВД средних и больших мощностей), реже тиристоры.
Основываясь на информации, полученной от ДПР, микроконтроллер формирует ШИМ-сигналы, которые усиливаются инвертором и подаются на обмотку синхронной машины.
Благодаря высокой надёжности и хорошей управляемости, вентильные двигатели применяются в широком спектре приложений: от компьютерных вентиляторов и CD/DVD-приводов до роботов и космических ракет.
Широкое применение ВД нашли в промышленности, особенно в системах регулирования скорости с большим диапазоном и высоким темпом пусков, остановок и реверса; авиационной технике, автомобильном машиностроении, биомедицинской аппаратуре, бытовой технике и пр. Также, этот тип двигателей часто используется в двигателях квадрокоптеров.
- Герасимов В. Г., Кузнецов Э. В., Николаева О. В. Электротехника и электроника. Кн. 2. Электромагнитные устройства и электрические машины. — М.: Энергоатомиздат, 1997. — 288 с. — ISBN 5-283-05005-X.
- ↑ Герман-Галкин С. Г. Глава 9. Модельное проектирование синхронных мехатронных систем // Matlab & Simulink. Проектирование мехатронных систем на ПК.. — СПб.: КОРОНА-Век, 2008. — 368 с. — ISBN 978-5-903383-39-9.
- ↑ Борцов Ю.А., Соколовский Г.Г. Глава 8. Адаптивно-модальное управление в следящих системах с бесконтактными моментными двигателями // Автоматизированный электропривод с упругими связями. — 2-ое изд., перераб. и доп.. — СПб: Энергоатомиздат, 1992. — 288 с. — ISBN 5-283-04544-7.
- ↑ Соколовский Г. Г. Электроприводы переменного тока с частотным регулированием. — М.: «Академия», 2006. — 272 с. — ISBN 5-7695-2306-9.
- ↑ Микеров А.Г. Управляемые вентильные двигатели малой мощности: Учебное пособие.. — СПб: СПбГЭТУ, 1997. — 64 с.
Ионный двигатель — Википедия
| Ионный двигатель | |
|---|---|
 Ионный двигатель NSTAR американской АМС Deep Space 1 | |
| Тип | электрический ракетный двигатель |
| Топливо | ионизированный инертный газ |
| Время эксплуатации | более 3 лет[1] |
| Применение | управление ориентацией и положением на орбите искусственных спутников Земли; главный тяговый двигатель небольших автоматических космических станций[1] |
| Тяга | 20—250 мН[1] |
| Потребляемая мощность | 1—7 кВт |
| КПД | 60—80 % |
| Скорость истечения | 20—50 км/с |
Ионный двигатель — тип электрического ракетного двигателя, принцип работы которого основан на создании реактивной тяги на базе ионизированного газа, разогнанного до высоких скоростей в электрическом поле[1]. Достоинством этого типа двигателей является малый расход топлива и продолжительное время функционирования (максимальный срок непрерывной работы самых современных образцов ионных двигателей составляет более трёх лет)[1]. Недостатком ионного двигателя является ничтожная по сравнению с химическими двигателями тяга[1]. По сравнению с двигателями с ускорением в магнитном слое ионный двигатель обладает большим энергопотреблением при равном уровне тяги. Ионные двигатели используют повышенные напряжения, обладают более сложной схемой и конструкцией, что усложняет решение задачи обеспечения высокой надёжности и электрической прочности двигателя.[2]
Сфера применения: управление ориентацией и положением на орбите искусственных спутников Земли (некоторые спутники оснащены десятками маломощных ионных двигателей) и использование в качестве главного тягового двигателя небольших автоматических космических станций[1].
Ионному двигателю в настоящее время принадлежит рекорд негравитационного ускорения космического аппарата в космосе — Deep Space 1 смог увеличить скорость аппарата массой около 370 кг на 4,3 км/с, израсходовав 74 кг ксенона[1]. Этот рекорд был побит космическим аппаратом Dawn: впервые — 5 июня 2010 года[3], а к сентябрю 2016 года набрана скорость уже в 39 900 км/ч[4] (11,1 км/с).
Ионный двигатель характеризуется малой тягой и высоким удельным импульсом. Ресурс работы оценивается в диапазоне 10 тысяч — 100 тысяч часов. В настоящее время разрабатывается новое поколение ионных двигателей, рассчитанных на расход 450 килограммов ксенона, чего хватит на 22 тысячи часов работы при максимальном форсаже. Причинами отказа могут стать износ ионной оптики, катодной диафрагмы и держателя для плазмы, истощение рабочего материала в каждой катодной вставке и откол материала в разрядной камере. Согласно проведенным тестам при удельном импульсе больше 2000 s первым произойдет структурный отказ ионной оптики при использовании 750 килограммов топлива, что в 1,7 раза превышает квалификационные требования. При удельном импульсе меньше 2000 s прототип может удвоить расход потребляемого топлива[5].
 Испытания ионного двигателя на ксеноне
Испытания ионного двигателя на ксенонеПринцип работы двигателя заключается в ионизации газа и его разгоне электростатическим полем. При этом, благодаря высокому отношению заряда к массе, становится возможным разогнать ионы до очень высоких скоростей (вплоть до 210 км/с[6], по сравнению с 3—4,5 км/с у химических ракетных двигателей). Таким образом, в ионном двигателе можно достичь очень большого удельного импульса. Это позволяет значительно уменьшить расход реактивной массы ионизированного газа по сравнению с расходом реактивной массы в химических ракетах, но требует больших затрат энергии. Технические характеристики ионного двигателя: потребляемая мощность 1—7 кВт, скорость истечения ионов 20—50 км/с, тяга 20—250 мН, КПД 60—80 %, время непрерывной работы более трёх лет. В существующих реализациях ионного двигателя в качестве источника энергии, необходимой для ионизации топлива, используются солнечные батареи.[1]
Рабочим телом, как правило, является ионизированный инертный газ (аргон, ксенон и т. п.), но иногда и ртуть. В ионизатор подаётся топливо, которое само по себе нейтрально, но при бомбардировании высокоэнергетическими электронами ионизируется. Таким образом, в камере образуется смесь из положительных ионов и отрицательных электронов. Для «отфильтровывания» электронов в камеру выводится трубка с катодными сетками, которая притягивает к себе электроны. Положительные ионы притягиваются к системе извлечения, состоящей из двух или трёх сеток. Между сетками поддерживается большая разница электростатических потенциалов (+1090 Вольт на внутренней против -225 Вольт на внешней). В результате попадания ионов между сетками, они разгоняются и выбрасываются в пространство, ускоряя корабль, согласно третьему закону Ньютона. Электроны, пойманные в катодную трубку, выбрасываются из двигателя под небольшим углом к соплу и потоку ионов. Это делается, во-первых, для того, чтобы корпус корабля оставался нейтрально заряженным, а во-вторых, чтобы ионы, «нейтрализованные» таким образом, не притягивались обратно к кораблю[1].
Недостаток двигателя в его нынешних реализациях — очень слабая тяга (порядка 50—100 миллиньютонов). Таким образом, нет возможности использовать ионный двигатель для старта с планеты, но, с другой стороны, в условиях невесомости, при достаточно долгой работе двигателя, есть возможность разогнать космический аппарат до скоростей, недоступных сейчас никаким другим из существующих видов двигателей.
Работающая модель ионного двигателя, действующая на основе отбрасывания заряженных ионов воздуха с проводящего острия под высоким напряжением, может быть создана в домашних условиях[7][8]
Ионный двигатель является первым хорошо отработанным на практике типом электрического ракетного двигателя. Концепция ионного двигателя была выдвинута в 1917 году Робертом Годдардом[9], а в 1954 году Эрнст Штулингерruen детально описал эту технологию, сопроводив её необходимыми вычислениями[10].
В 1955 году Алексей Иванович Морозов написал, а в 1957 году опубликовал в ЖЭТФ статью «Об ускорении плазмы магнитным полем»[11][12]. Это дало толчок к исследованиям, и уже в 1964 году на советском аппарате «Зонд-2» первым таким устройством, выведенным в космос, стал плазменно-эрозионный двигатель конструкции А. М. Андрианова. Он работал в качестве двигателя ориентации с питанием от солнечных батарей[13].
Первый американский функционирующий ионный электростатический двигатель (создан в США в НАСА John H. Glenn Research Center at Lewis Field) был построен под руководством Гарольда Кауфманаruen в 1959 году. В 1964 году прошла первая успешная демонстрация ионного двигателя в суборбитальном полёте (SERT I)[1]. Двигатель успешно работал в течение запланированной 31 минуты. В 1970 году прошло испытание, призванное продемонстрировать эффективность долговременной работы ртутных ионных электростатических двигателей в космосе (SERT II)[14]. Малая тяга и низкий КПД надолго отвадили американских конструкторов от применения электрических и ионных двигателей.
Тем временем в Советском Союзе продолжалась разработка и улучшались характеристики. Были разработаны и применялись различные типы ионных двигателей на различных типах космических аппаратов. Двигатели СПД-25 тягой 25 миллиньютон, СПД-100[15], и другие серийно устанавливались на советские спутники с 1982 года[16].
В качестве основного (маршевого) двигателя ионный двигатель был впервые применён на космическом аппарате Deep Space 1 (первый запуск двигателя — 10 ноября 1998 г.). Следующими аппаратами стали европейский лунный зонд Смарт-1, запущенный 28 сентября 2003 года[17], и японский аппарат Хаябуса, запущенный к астероиду Итокава в мае 2003 года[1].
Следующим аппаратом НАСА, обладающим маршевыми ионными двигателями, стала (после ряда замораживаний и возобновления работ) АМС Dawn, которая стартовала 27 сентября 2007 года. Dawn предназначен для изучения Весты и Цереры и несёт три двигателя NSTAR, успешно испытанных на Deep Space 1[1].
Европейское Космическое Агентство установило ионный двигатель на борту спутника GOCE, запущенного 17 марта 2009 года на сверхнизкую околоземную орбиту высотой около 260 км. Ионный двигатель создаёт в постоянном режиме импульс, компенсирующий атмосферное трение и другие негравитационные воздействия на спутник[1].
Впервые ионный двигатель появился в фантастике в 1910 году — в романе Дональда В. Хорнера «Аэроплан к солнцу: приключения авиатора и его друзей»[18][19]. Ионный двигатель широко представлен в фантастической литературе, компьютерных играх и кинематографе (так в «Звёздных войнах» экономичный ионный двигатель развивает скорость до трети световой и используется для перемещения в обычном пространстве на небольшие по космическим меркам расстояния — например в пределах планетарной системы[20]), но для практической космонавтики стал доступен только во второй половине XX века. Реальный ионный двигатель по своим техническим характеристикам (и в первую очередь по силе тяги) значительно уступает своим литературным прообразам (так Эдгард Чуэйри образно сравнивает ионный двигатель с автомобилем, которому нужно двое суток для разгона с 0 до 100 км/ч)[1].
Действующие миссии[править | править код]
- Starlink — проект компании Илона Маска SpaceX по выведению спутников на околоземную орбиту для создания глобальной сети интернет. Технология используется для маневрирования спутников и избежания их столкновения с космическим мусором[источник не указан 232 дня].
- Artemis[17]
- Хаябуса-2
- BepiColombo. Запущен 20 октября 2018 года. ЕКА использует ионный двигатель в этой меркурианской миссии, наряду с гравитационными манёврами и химическим двигателем для перехода на орбиту вокруг Меркурия в качестве искусственного спутника[17]. На аппарате работают самые мощные на сегодняшний день 4 ионных двигателя суммарной тягой 290 мН[21].
Завершённые миссии[править | править код]
- SERT (англ. Space Electric Rocket Test, рус. Тест Космического Электрического Двигателя — программа NASA, в которой на спутниках впервые был использован ионный двигатель)
- Deep Space 1
- Hayabusa (вернулся на Землю 13 июня 2010 года)
- Smart 1 (завершил миссию 3 сентября 2006 года, после чего был сведён с орбиты)
- GOCE (после исчерпания запасов рабочего тела сошёл с орбиты)
- LISA Pathfinder (ЕКА) использовал ионные двигатели в качестве вспомогательных для точного контроля высоты; деактивирован 30 июня 2017.
- Dawn. 1 ноября 2018 года аппарат исчерпал все запасы топлива для маневрирования и ориентации, его миссия, длившаяся 11 лет, была официально завершена.
Планируемые миссии[править | править код]
Нереализованные миссии[править | править код]
 Компьютерная модель Прометея-1
Компьютерная модель Прометея-1NASA ввело проект «Прометей», для которого разрабатывался мощный ионный двигатель, питающийся электричеством от бортового ядерного реактора. Предполагалось, что такие двигатели в количестве восьми штук могли бы разогнать аппарат до 90 км/с. Первый аппарат этого проекта Jupiter Icy Moons Explorer планировалось отправить к Юпитеру в 2017 году, однако разработка этого аппарата была приостановлена в 2005 году из-за технических сложностей. В 2005 году программа была закрыта[23]. В настоящее время идёт поиск более простого проекта АМС для первого испытания по программе «Прометей»[24].
Проект Джефри Лэндиса[править | править код]
Geoffrey A. Landisruen предложил проект межзвёздного зонда с ионным двигателем, получающим энергию через лазер от базовой станции, что даёт некоторое преимущество по сравнению с чисто космическим парусом. В настоящее время данный проект неосуществим из-за технических ограничений — например, он потребует силы тяги от ионных двигателей в 1570 Н при нынешних 20—250 мН[25](по другим данным рекорд тяги у современных ионных двигателей 5,4 Н[26]).
- ↑ 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 Choueiri, Edgar Y. (2009) New dawn of electric rocket Scientific American 300, pp. 58-65 DOI:10.1038/scientificamerican0209-58
- ↑ Белан Н. В., Ким В. П., Оранский А. И., Тахонов В. Б. Стационарные плазменные двигатели. — Харьк. авиац. ин-т. — Харьков, 1989. — С. 18—20.
- ↑ NASA’s Dawn Spacecraft Fires Past Record for Speed Change, NASA (7 июня 2010). Дата обращения 2 октября 2016.
- ↑ Marc Rayman. Dawn Journal September 27, 2016 (англ.). NASA (27 September 2016). Дата обращения 19 ноября 2016.
- ↑ Lifetime Assessment of the NEXT Ion Thruster Jonathan L. Van Noord1 NASA Glenn Research Center, Cleveland, Ohio 44135
- ↑ Испытан рекордный ионный двигатель (рус.). membrana.ru (12 января 2006). Дата обращения 22 февраля 2015.
- ↑ Брага Н. Создание роботов в домашних условиях. — М.: НТ Пресс, 2007. — С. 71-79 — ISBN 5-477-00749-4.
- ↑ «Собрал летающий ионный двигатель у себя дома» (видео пользователя YouTube KREOSAN, 13 февраля 2017)
- ↑ Robert H. Goddard: American Rocket Pioneer (неопр.). Smithsonian Scrapbook. Smithsonian Institution Archives. Дата обращения 21 февраля 2015.
- ↑ Choueiri, E. Y. A Critical History of Electric Propulsion: The First 50 Years (1906–1956) (неопр.). Дата обращения 21 февраля 2015.
- ↑ Морозов А. И. Об ускорении плазмы магнитным полем // ЖЭТФ. — 1957. — Т. 32, вып. 2. — С. 305—310.
- ↑ Потомки повелителя ветров: Вместо сердца — плазменный мотор! // Популярная механика. — 2005. — № 12.
- ↑ Доктор физико-математических наук А. МОРОЗОВ. КОСМИЧЕСКИЙ ЭЛЕКТРОВОЗ (неопр.). Наука и Жизнь (сентябрь 1999).
- ↑ Innovative Engines — Glenn Ion Propulsion Research Tames the Challenges of 21st Century Space Travel (англ.). Glenn Research Center (20 May 2008). Дата обращения 22 февраля 2015.
- ↑ Стационарный плазменный двигатель СПД-100 (рус.). www.mai.ru. Дата обращения 19 октября 2017.
- ↑ Спутник убийца или благодетель: что запустила Россия в космос?, Slon.ru. Дата обращения 19 октября 2017.
- ↑ 1 2 3 Рахманов, М. Ионные двигатели: от фантастики к реальным пускам (рус.). CNews.ru (30 сентября 2003). Дата обращения 22 февраля 2015.
- ↑ Список публикаций произведения «By Aeroplane to the Sun» в ISFDB (англ.)
- ↑ Peter Nicholls. Ion Drive (англ.). SFE: The Encyclopedia of Science Fiction, online edition, 2011— (20 December 2011). Дата обращения 1 июля 2018.
- ↑ Кочуров, В. Бороздя гиперпространство. Физика и технологии «Звёздных войн» (неопр.). журнал «Мир фантастики» (27 декабря 2005). Дата обращения 22 февраля 2015.
- ↑ (2013) «BepiColombo Electric Propulsion Thruster and High Power Electronics Coupling Test Performances» in 33rd International Electric Propulsion Conference. 6–10 October 2013. Washington, D.C... IEPC-2013-133.
- ↑ Jason Mick. Commercially Developed Plasma Engine Soon to be Tested in Space (неопр.) (недоступная ссылка). DailyTech (11 августа 2008). Дата обращения 22 февраля 2015. Архивировано 22 февраля 2015 года.
- ↑ The National Academy of Sciences. Launching Science: Science Opportunities Provided by NASA’s Constellation System (англ.). — Washington, DC: The National Academies Press (англ.)русск., 2009. — P. 18. — ISBN 978-0-309-11644-2.
- ↑ The National Academy of Sciences. Launching Science: Science Opportunities Provided by NASA’s Constellation System. — Washington, DC: The National Academies Press, 2009. — С. 18. — ISBN 978-0-309-11644-2.
- ↑ Landis, G. A. звёздный ионный зонд, снабжаемый энергией по лазерному лучу (рус.) (1 сентября 1994). Дата обращения 22 февраля 2015.
- ↑ Ионный двигатель NASA показал новый рекорд производительности (рус.). Hi-News.Ru (14 октября 2017).
- Морозов А. И. Физические основы космических электрореактивных двигателей. — М.: Атомиздат, 1978. — 328 с.
- Плазменные ускорители и ионные инжекторы / Морозов А. И.. — М.: Наука, 1984. — 269 с.
- Форрестер, Т. А. Интенсивные ионные пучки. — М.: Мир, 1992. — 354 с. — ISBN 5-03-001999-0.
- A.B. Жаринов, Ю. С. Попов, «Об ускорении плазмы замкнутым холловским током», ЖТФ, 1967, Т.37,вып.2.
- Kaufman H. R., Robinson R. S. Ion Source Design for Industrial Application (англ.) // AIAA Journal : журнал. — 1982. — Vol. 20, no. 6. — P. 745—760.
- A. I. Morozov and V. V. Savelyev, «Fundamentals of stationary plasma thruster theory, » in Reviews of Plasma Physics, edited by B. B. Kadomstev
and V. D. Shafranov (Kluwer, Dordecht, 2000), Vol. 21.
- V. Kim, J. Propul. Power 14, 736 (1998).