Электродвигатель постоянного тока — Википедия
 Пример простейшего коллекторного двигателя постоянного тока с двухполюсным статором и с двухполюсным ротором
Пример простейшего коллекторного двигателя постоянного тока с двухполюсным статором и с двухполюсным роторомЭлектродвигатель постоянного тока (ДПТ) — электрическая машина постоянного тока, преобразующая электрическую энергию постоянного тока в механическую энергию.
 Схема электродвигателя с двумя обмотками электромагнита на якоре
Схема электродвигателя с двумя обмотками электромагнита на якоре 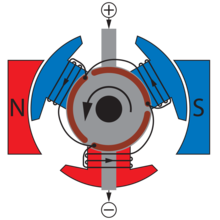 Схема электродвигателя с тремя обмотками электромагнита на якоре
Схема электродвигателя с тремя обмотками электромагнита на якореЭтот двигатель можно ещё назвать синхронной машиной постоянного тока с самосинхронизацией. Простейший двигатель, являющийся машиной постоянного тока, состоит из постоянного магнита на индукторе (статоре), одного электромагнита с явно выраженными полюсами на якоре (двухзубцового якоря с явно выраженными полюсами и с одной обмоткой), щёточноколлекторного узла с двумя пластинами (ламелями) и двумя щётками.
Простейший двигатель имеет два положения ротора (две «мёртвые точки»), из которых невозможен самозапуск, и неравномерный крутящий момент. В первом приближении магнитное поле полюсов статора равномерное (однородное). В этом случае крутящий момент равен:
- Ms=s⋅2⋅B⋅I⋅L⋅r⋅sin(w⋅t){\displaystyle M_{s}=s\cdot 2\cdot B\cdot I\cdot L\cdot r\cdot \sin(w\cdot t)},
где s{\displaystyle s} — число витков обмотки ротора,
B{\displaystyle B} — индукция магнитного поля полюсов статора,
I{\displaystyle I} — ток в обмотке ротора [А],
L{\displaystyle L} — длина рабочей части витка обмотки [м],
r{\displaystyle r} — расстояние от оси ротора до рабочей части витка обмотки ротора (радиус) [м],
sin{\displaystyle \sin } — синус угла между направлением северный-южный полюс статора и аналогичным направлением в роторе [рад],
w{\displaystyle w} — угловая скорость [рад/сек],
t{\displaystyle t} — время [сек].
Из-за наличия угловой ширины щёток и углового зазора между пластинами (ламелями) коллектора в двигателе этой конструкции имеются динамически постоянно короткозамкнутые щётками части обмотки ротора. Число короткозамкнутых частей обмотки ротора равно числу щёток. Эти короткозамкнутые части обмотки ротора не участвуют в создании общего крутящего момента.
Суммарная короткозамкнутая часть ротора в двигателях с одним коллектором равна:
- n⋅α/(2⋅π){\displaystyle n\cdot \alpha /(2\cdot \pi )},
где n{\displaystyle n} — число щёток,
α{\displaystyle \alpha } — угловая ширина одной щётки [радиан].
Без учёта короткозамкнутых щётками частей крутящего момента средний крутящий момент s{\displaystyle s} рамок (витков) с током за один оборот равен площади под интегральной кривой крутящего момента, делённой на длину периода (1 оборот = 2π{\displaystyle 2\pi }):
- Mkrsr=(2⋅∫0πs⋅2⋅B⋅I⋅L⋅r⋅sin(w⋅t)d(w⋅t))/(2⋅π)=s⋅2⋅B⋅I⋅L⋅r⋅(∫0πsin(w⋅t)d(w⋅t))/π{\displaystyle Mkrsr=\left(2\cdot \int \limits _{0}^{\pi }s\cdot 2\cdot B\cdot I\cdot L\cdot r\cdot \sin(w\cdot t)d(w\cdot t)\right)/(2\cdot \pi )=s\cdot 2\cdot B\cdot I\cdot L\cdot r\cdot \left(\int \limits _{0}^{\pi }\sin(w\cdot t)d(w\cdot t)\right)/\pi }.
 Рис. 2 Коллекторный двухполюсный двигатель постоянного тока с тремя зубцами на роторе
Рис. 2 Коллекторный двухполюсный двигатель постоянного тока с тремя зубцами на ротореДвигатель, показанный на рис. 2, состоит из:
— одного электромагнита на статоре (двухполюсного статора) с явно выраженными полюсами и с одной обмоткой,
— ротора с тремя зубцами и, соответственно, с тремя обмотками (обмотки ротора при такой конструкции могут быть включены звездой (в столь маломощной машине условия коммутации допускают такое соединение) или треугольником),
— щёточноколлекторного узла с тремя пластинами (ламелями) и с двумя щётками.
Самозапуск возможен из любого положения ротора. Имеет меньшую неравномерность крутящего момента, чем двигатель с двухзубцовым ротором (рис. 1).
ДПТ являются обратимыми электрическими машинами, то есть в определённых условиях способны работать как генераторы постоянного тока.
Сокращение ДПТ (двигатель постоянного тока) является неудачным, так как название «двигатель переменного тока» имеет то же сокращение — ДПТ. Но так как двигатели переменного тока разделяются на асинхронные (АД) и синхронные (СД), сокращение ДПТ относят к двигателям постоянного тока.
Статор (индуктор)[править | править код]
На статоре ДПТ располагаются, в зависимости от конструкции, или постоянные магниты (микродвигатели), или электромагниты с обмотками возбуждения (катушками, наводящими магнитный поток возбуждения).
В простейшем случае статор имеет два полюса, то есть один магнит с одной парой полюсов. Но чаще ДПТ имеют две пары полюсов. Бывает и более. Помимо основных полюсов на статоре (индукторе) могут устанавливаться добавочные полюса, которые предназначены для улучшения коммутации на коллекторе.
Ротор (якорь)[править | править код]
Минимальное число зубцов ротора, при котором самозапуск возможен из любого положения ротора — три. Из трёх, кажущихся явно выраженными, полюсов, на самом деле один полюс всё время находится в зоне коммутации, то есть ротор имеет минимум одну пару полюсов (как и статор, так как в противном случае работа двигателя невозможна).
Ротор любого ДПТ состоит из многих катушек, на часть которых подаётся питание, в зависимости от угла поворота ротора, относительно статора. Применение большого числа (несколько десятков) катушек, необходимо для уменьшения неравномерности крутящего момента, для уменьшения коммутируемого (переключаемого) тока, и для обеспечения оптимального взаимодействия между магнитными полями ротора и статора (то есть для создания максимального момента на роторе).
При вычислении момента инерции ротора его, в первом приближении, можно считать сплошным однородным цилиндром с моментом инерции, равным:
- Ja=(1/2)⋅m⋅R2{\displaystyle J_{a}=(1/2)\cdot m\cdot R^{2}},
где m{\displaystyle m} — масса цилиндра (ротора),
а R{\displaystyle R} — радиус цилиндра (ротора).
Коллектор[править | править код]
Коллектор (щёточно-коллекторный узел) выполняет одновременно две функции: является датчиком углового положения ротора и переключателем тока со скользящими контактами.
Конструкции коллекторов имеют множество разновидностей.
Выводы всех катушек объединяются в коллекторный узел. Коллекторный узел обычно представляет собой кольцо из изолированных друг от друга пластин-контактов (ламелей), расположенных по оси (вдоль оси) ротора. Существуют и другие конструкции коллекторного узла.
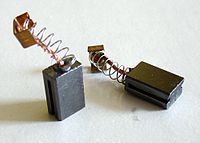 Рис. 4 Графитовые щётки
Рис. 4 Графитовые щёткиЩёточный узел необходим для подвода электроэнергии к катушкам на вращающемся роторе и переключения тока в обмотках ротора. Щётка — неподвижный контакт (обычно графитовый или медно-графитовый).
Щётки с большой частотой размыкают и замыкают пластины-контакты коллектора ротора. Как следствие, при работе ДПТ происходят переходные процессы в обмотках ротора. Эти процессы приводят к искрению на коллекторе, что значительно снижает надёжность ДПТ. Для уменьшения искрения применяются различные способы, основным из которых является установка добавочных полюсов.
При больших токах в роторе ДПТ возникают мощные переходные процессы, в результате чего искрение может постоянно охватывать все пластины коллектора, независимо от положения щёток. Данное явление называется кольцевым искрением коллектора или «круговой огонь». Кольцевое искрение опасно тем, что одновременно выгорают все пластины коллектора и срок его службы значительно сокращается. Визуально кольцевое искрение проявляется в виде светящегося кольца около коллектора. Эффект кольцевого искрения коллектора недопустим. При проектировании приводов устанавливаются соответствующие ограничения на максимальные моменты (а следовательно и токи в роторе), развиваемые двигателем.
Принципу работы электродвигателя постоянного тока может быть дано два описания:
- 1. подвижная рамка (два стержня с замкнутыми концами) с током в магнитном поле статора
или
- 2. взаимодействие магнитных полей статора и ротора.
Рамка с током, в однородном магнитном поле полюсов статора с индукцией B{\displaystyle B}, на два стержня рамки длиной L{\displaystyle L}, и с током I{\displaystyle I}, действует сила Ампера F{\displaystyle F}, постоянной величины, равные:
- F=B⋅I⋅L{\displaystyle F=B\cdot I\cdot L} и направленные в противоположные стороны.
Эти силы прикладываются к плечам p{\displaystyle p}, равным:
- p=r⋅sin(w⋅t){\displaystyle p=r\cdot \sin(w\cdot t)}, где r{\displaystyle r} — радиус рамки;
и создают крутящий момент Mk{\displaystyle M_{k}}, равный:
- Mk=F⋅p=B⋅I⋅L⋅r⋅sin(w⋅t){\displaystyle M_{k}=F\cdot p=B\cdot I\cdot L\cdot r\cdot \sin(w\cdot t)}.
Для двух стержней рамки, суммарный крутящий момент равен:
- Mks=2⋅Mk=2⋅B⋅I⋅L⋅r⋅sin(w⋅t){\displaystyle M_{k}s=2\cdot M_{k}=2\cdot B\cdot I\cdot L\cdot r\cdot \sin(w\cdot t)}.
Практически (из-за того, что угловая ширина щётки α{\displaystyle \alpha } (в радианах) немного меньше угловой ширины зазора β{\displaystyle \beta }, между пластинами (ламелями) коллектора, чтобы источник питания не замыкался накоротко) четыре небольших части под кривой крутящего момента, равные:
- 2⋅B⋅I⋅L⋅r⋅∫0δ/2sin(w⋅t)d(w⋅t){\displaystyle 2\cdot B\cdot I\cdot L\cdot r\cdot \int \limits _{0}^{\delta /2}\sin(w\cdot t)d(w\cdot t)}, где δ=β−α{\displaystyle \delta =\beta -\alpha },
не участвуют в создании общего крутящего момента.
При числе витков в обмотке равном s{\displaystyle s}, крутящий момент будет равен:
- Ms=s⋅2⋅B⋅I⋅L⋅r⋅sin(w⋅t){\displaystyle M_{s}=s\cdot 2\cdot B\cdot I\cdot L\cdot r\cdot \sin(w\cdot t)}.
Наибольший крутящий момент будет при угле поворота рамки равном: π/2{\displaystyle \pi /2}, то есть при угле 90°.
При этом угле поворота рамки с током, вектора магнитных полей статора и ротора (рамки) будут перпендикулярны друг к другу, то есть под углом 90°. При угле поворота ротора (рамки) равном 180°, крутящий момент равен нулю (из-за нулевого плеча), но силы не равны нулю и это положение ротора (рамки), при отсутствии переключения тока, весьма устойчиво и подобно одному шагу в шаговом двигателе.
Без учёта короткозамкнутых щётками частей крутящего момента средний крутящий момент за один оборот (период) равен площади под интегральной кривой крутящего момента, делённой на длину периода (2⋅π){\displaystyle (2\cdot \pi )}:
- Mkrsr=(2⋅∫0πB⋅I⋅L⋅r⋅sin(w⋅t)d(w⋅t))/(2⋅π)=B⋅I⋅L⋅r⋅(∫0πsin(w⋅t)d(w⋅t))/π{\displaystyle Mkrsr=\left(2\cdot \int \limits _{0}^{\pi }B\cdot I\cdot L\cdot r\cdot \sin(w\cdot t)d(w\cdot t)\right)/(2\cdot \pi )=B\cdot I\cdot L\cdot r\cdot \left(\int \limits _{0}^{\pi }\sin(w\cdot t)d(w\cdot t)\right)/\pi }.
При s{\displaystyle s} витков в обмотке:
- Mkrsr=s⋅B⋅I⋅L⋅r⋅(∫0πsin(w⋅t)d(w⋅t))/π{\displaystyle Mkrsr=s\cdot B\cdot I\cdot L\cdot r\cdot \left(\int \limits _{0}^{\pi }\sin(w\cdot t)d(w\cdot t)\right)/\pi }.
Две рамки с током в однородном магнитном поле полюсов статора[править | править код]
Если на роторе машины установить вторую рамку, сдвинутую относительно первой на угол π/2{\displaystyle \pi /2}, то получится четырёхполюсный ротор.
Момент второй рамки:
- Mc=2⋅B⋅I⋅L⋅r⋅sin(ωt+π/2)=2⋅B⋅I⋅L⋅r⋅cos(ωt){\displaystyle M_{c}=2\cdot B\cdot I\cdot L\cdot r\cdot \sin(\omega t+\pi /2)=2\cdot B\cdot I\cdot L\cdot r\cdot \cos(\omega t)}.
Суммарный момент обеих рамок:
- Mk=Ms+Mc=2⋅B⋅I⋅L⋅r⋅(sin(ωt)+cos(ωt)){\displaystyle M_{k}=M_{s}+M_{c}=2\cdot B\cdot I\cdot L\cdot r\cdot (\sin(\omega t)+\cos(\omega t))}.
Таким образом получается, что крутящий момент зависит от угла поворота ротора, но неравномерность меньше, чем при одной рамке. Кроме этого добавляется самозапуск из любого положения ротора. При этом для второй рамки потребуется второй коллектор (щёточно-коллекторный узел). Оба узла соединяются параллельно, при этом переключение тока в рамках происходит в интервалах с наименьшим током в рамках, при последовательном соединении переключение тока в одной из рамок (разрыв цепи) происходит во время максимального тока в другой рамке. Практически, из-за того, что угловая ширина щётки α{\displaystyle \alpha } (в радианах) немного меньше угловой ширины зазора β{\displaystyle \beta } (в радианах) между пластинами коллектора (ламелями), восемь небольших частей под кривой крутящего момента, равных:
- 2⋅B⋅I⋅L⋅r∫0Δ/2sin(ωt)⋅d(ωt){\displaystyle 2\cdot B\cdot I\cdot L\cdot r\int \limits _{0}^{\Delta /2}\sin(\omega t)\cdot d(\omega t)}, где Δ=β−α{\displaystyle \Delta =\beta -\alpha },
не участвуют в создании общего крутящего момента.
Рамка с током в неоднородном магнитном поле полюсов статора[править | править код]
Если магнитное поле полюсов статора неоднородное и изменяется по отношению к стержням рамки по закону:
- B=Bm⋅sin(ω⋅t){\displaystyle B=B_{m}\cdot \sin(\omega \cdot t)},
то крутящий момент для одного стержня будет равен:
- M=Bm⋅sin(ω⋅t)⋅I⋅L⋅r⋅sin(ω⋅t)=Bm⋅I⋅L⋅r⋅(sin(ω⋅t))2{\displaystyle M=B_{m}\cdot \sin(\omega \cdot t)\cdot I\cdot L\cdot r\cdot \sin(\omega \cdot t)=B_{m}\cdot I\cdot L\cdot r\cdot (\sin(\omega \cdot t))^{2}},
для двух стержней:
- Ms=2⋅Bm⋅I⋅L⋅r⋅(sin(ω⋅t))2{\displaystyle M_{s}=2\cdot B_{m}\cdot I\cdot L\cdot r\cdot (\sin(\omega \cdot t))^{2}},
для рамки из s{\displaystyle s} витков:
- Mss=s⋅2⋅Bm⋅I⋅L⋅r⋅(sin(ω⋅t))2{\displaystyle M_{s}s=s\cdot 2\cdot B_{m}\cdot I\cdot L\cdot r\cdot (\sin(\omega \cdot t))^{2}}.
В создании крутящего момента не участвуют четыре части под кривой крутящего момента равные:
- s⋅2⋅Bm⋅I⋅L⋅r⋅∫0δ/2(sin(ω⋅t))2d(ω⋅t).{\displaystyle s\cdot 2\cdot B_{m}\cdot I\cdot L\cdot r\cdot \int \limits _{0}^{\delta /2}(\sin(\omega \cdot t))^{2}d(\omega \cdot t).}
Без учёта короткозамкнутых щётками частей крутящего момента средний крутящий момент за один оборот (период) равен площади под интегральной кривой делённой на длину периода (2⋅π){\displaystyle (2\cdot \pi )}:
- Mkrsr=2⋅∫0πBm⋅I⋅L⋅r⋅(sin(ω⋅t))2d(ω⋅t)/(2⋅π)=Bm⋅I⋅L⋅r⋅∫0π(sin(ω⋅t))2d(ω⋅t)/π{\displaystyle Mkrsr=2\cdot \int \limits _{0}^{\pi }B_{m}\cdot I\cdot L\cdot r\cdot (\sin(\omega \cdot t))^{2}d(\omega \cdot t)/(2\cdot \pi )=B_{m}\cdot I\cdot L\cdot r\cdot \int \limits _{0}^{\pi }(\sin(\omega \cdot t))^{2}d(\omega \cdot t)/\pi }.
При s{\displaystyle s} витках в обмотке:
- Mkrsr=(s⋅Bm⋅I⋅L⋅r⋅∫0π(sin(ω⋅t))2d(ω⋅t))/π{\displaystyle Mkrsr=(s\cdot B_{m}\cdot I\cdot L\cdot r\cdot \int \limits _{0}^{\pi }(\sin(\omega \cdot t))^{2}d(\omega \cdot t))/\pi }.
Две рамки с током в неоднородном магнитном поле полюсов статора[править | править код]
Для второй (косинусной) рамки:
- sin(w⋅t+π/2)=cos(w⋅t){\displaystyle \sin(w\cdot t+\pi /2)=\cos(w\cdot t)};
крутящий момент от второй (косинусной) рамки будет равен:
- Mc=2⋅Bm⋅I⋅L⋅r⋅(cos(w⋅t))2{\displaystyle M_{c}=2\cdot B_{m}\cdot I\cdot L\cdot r\cdot (\cos(w\cdot t))^{2}},
суммарный крутящий момент от обеих рамок равен:
- Mk=Ms+Mc=2⋅Bm⋅I⋅L⋅r⋅((sin(w⋅t))2+(cos(w⋅t))2)=2⋅Bm⋅I⋅L⋅r{\displaystyle M_{k}=M_{s}+M_{c}=2\cdot B_{m}\cdot I\cdot L\cdot r\cdot ((\sin(w\cdot t))^{2}+(\cos(w\cdot t))^{2})=2\cdot B_{m}\cdot I\cdot L\cdot r},
то есть постоянен, и от угла поворота ротора не зависит.
Практически из-за наличия зазора восемь небольших частей, под кривой крутящего момента, равные:
- 2⋅Bm⋅I⋅L⋅r⋅∫0δ/2(sin(w⋅t))2d(w⋅t){\displaystyle 2\cdot B_{m}\cdot I\cdot L\cdot r\cdot \int \limits _{0}^{\delta /2}(\sin(w\cdot t))^{2}d(w\cdot t)} каждая,
в создании крутящего момента не участвуют.
Для вычисления момента инерции ротора его можно считать, в первом приближении, сплошным однородным цилиндром с моментом инерции:
- Ja=(1/2)⋅m⋅R2{\displaystyle J_{a}=(1/2)\cdot m\cdot R^{2}}, где m{\displaystyle m} — масса цилиндра (ротора), R{\displaystyle R} — радиус цилиндра (ротора).
Взаимодействие магнитных полей[править | править код]
Необходимо отметить, что работа по вращению ротора (рамки с током) совершается не за счет энергии внешнего магнитного поля (поля статора), а за счет источника тока, поддерживающего неизменным ток в контуре рамки. При изменениях магнитного потока, пронизывающего контур (рамку с током) при вращении, в этом контуре возникает э.д.с. индукции, направленная противоположно э.д.с. источника тока. Следовательно, источник тока, кроме работы, затрачиваемой на выделение ленц-джоулева тепла, должен совершать дополнительную работу против э.д.с. индукции. Сам же процесс вращения происходит за счет силы Ампера, действующей на проводник с электрическим током, находящийся в магнитном поле. Правильное мнение, что ротор (рамка с током) приходит в движение за счет того, что его магнитное поле отталкивается от магнитного поля статора.
Все электродвигатели постоянного тока автоматически создают вращающий момент, равный моменту сопротивления на валу и при этом частота вращения устанавливается постоянной[1].
Предположим, что момент сопротивления Mr{\displaystyle M_{r}} возрос и стал больше момента вращения Md{\displaystyle M_{d}}. В соответствии с уравнением механики Md−Mr=JdΩdt{\displaystyle M_{d}-M_{r}=J{\frac {d\Omega }{dt}}} появляется отрицательное ускорение dΩdt<0{\displaystyle {\frac {d\Omega }{dt}}<0} и частота вращения якоря n=60Ω2π{\displaystyle n={\frac {60\Omega }{2\pi }}} начинает падать. Вместе с частотой вращения якоря падает противо-ЭДС E=CenΦ{\displaystyle E=C_{e}n\Phi }, а ток якоря I=U−ER{\displaystyle I={\frac {U-E}{R}}} и вращающий момент Md=CmΦI
Принцип действия двигателя постоянного тока: конструкция и особенности
Главной конструктивной и характерной принадлежностью машины постоянного тока, служит использование для присоединения к электрической сети коммутатора, предназначенного для преобразования величин постоянного тока в переменный ток. Коммутатор является непременным элементом любой машины этого типа ввиду того, что ее якорная обмотка двигателя подразумевает наличие переменного тока.
Особенности двигателя постоянного тока
Двигательные устройства постоянного тока отличаются широкими возможностями регулирования скорости вращения и обладают способностью сохранять во всем диапазоне регулирования высокий КПД, а также имеют в наличии механические характеристики, благодаря которым двигатели могут использоваться по специальному назначению, в соответствии с необходимыми требованиями.
Принцип работы
Функционально двигатель принадлежит к классу синхронных машин обращенного типа, это объясняется тем, что статор и ротор поменяли выполнение задач. Статор выполняет функции по возбуждению магнитного поля, ротор принял задачи направленные на преобразование энергии.
Во время вращения якоря в магнитном поле, производимым статором в витках обмотки, наводится ЭДС. Направление ее движения находится по правилу правой руки.
После того, как якорь и коллектор повернутся на 180 градусов виток меняет свои стороны, на противоположное направление меняется движение ЭДС.
Так происходит процесс индуцирования переменной электродвижущей силы, выпрямляемой посредством коллектора.
Коллектор, через щеточный механизм, соединен с обеими сторонами витка, в результате этого происходит снятие щетками текущего в неизменном направлении пульсирующего напряжения, это способствует наличию во внешней цепи, идущего в постоянном направлении, пульсирующего тока. Для того, чтобы снизить пульсацию в пазах якоря, прибавляют добавочное количество витков.
Конструкция двигателя
Двигатель, как и любая другая машина этого типа, содержит в своей конструкции статор, являющегося неподвижным элементом, и ротор (якорь) – вращающийся элемент машины, между ними находится воздушный зазор. В якоре двигателя происходит индуцирование ЭДС. Создание основного магнитного поля происходит при помощи главных полюсов, состоящих из сердечников и катушек возбуждения.
Равномерное распределение полученной магнитной индукции в области воздушного зазора обеспечивается полюсными наконечниками.
Чередование полярности полюсов во время движения электрического тока достигается за счет соединения катушек главных полюсов в обмотку возбуждения. Для улучшения коммутации предусмотрены добавочные полюса.
Уменьшение вихревых токов, которые появляются в результате перемагничивания якоря в процессе его вращения в созданном магнитном поле, происходит за счет конструкции сердечника, исполненного из пластин электротехнической стали, для большего эффекта он покрывается специальным лаком.
Контакт внешней цепи машины с коллектором осуществляется за счет щеток, основным материалом для них является графит.
Область применения
Несмотря на то, что себестоимость этого типа двигателя намного дороже асинхронных машин, их особенности могут сыграть решающую роль в узкоцелевом специальном назначении.
С помощью таких двигателей приводятся в работу прокатные станы, они используются для привода гребного винта на кораблях, а также для транспортных средств, имеющих систему питания на постоянном токе.
Поэтому их область использования характерна для нужд там, где необходима электрическая тяга, это: тепловозы, электровозы, электропоезда, городской транспорт, то есть там, где необходимо применить мягкие механические характеристики и широкие пределы регулировки количества оборотов вращения.
Пишите комментарии, дополнения к статье, может я что-то пропустил. Загляните на карту сайта, буду рад, если вы найдете на моем сайте еще что-нибудь полезное. Всего доброго.
Принцип работы двигателя постоянного тока
Для запуска двигателя постоянного тока обе его обмотки – обмотка возбуждения (ОВ) и обмотка якоря (ОЯ) с помощью рубильника, пускателя или другой пусковой аппаратуры включается в питающую сеть постоянного тока на номинальное напряжение U = U ном .
Протекающий по обмотке возбуждения ток возбуждения I В создаёт в статоре магнитный поток возбуждения Ф В , пронизывающий обмотку якоря.
Протекающий по обмотке якоря ток якоря I Я взаимодействует с магнитным потоком возбуждения статора Ф В , в результате чего возникают электромагнитные силы F, действующие на проводники якоря и создающие вращающий электромагнитный момент
М = cM Ф В I Я .
NB. cM — константа момента, определяемая конструкцией электродвигателя.
Под действием вращающего электромагнитного момента М якорь двигателя приходит во вращение и по окончании разгона ротор вращается с частотой
n = ( U – R Я I Я ) / сЕ Ф В .
NB. сЕ — константа ЭДС, определяемая конструкцией электродвигателя;
RЯ IЯ — падение напряжения в обмотке якоря.
 При
вращении ротора двигателя проводники
обмотки якоря пересекают магнитные
силовые линии потока возбуждения статора
Ф В в результате чего в обмотке якоря
наводится ЭДС (правило правой руки)
При
вращении ротора двигателя проводники
обмотки якоря пересекают магнитные
силовые линии потока возбуждения статора
Ф В в результате чего в обмотке якоря
наводится ЭДС (правило правой руки)Е = сЕ Ф В n .
Наведённая в обмотке якоря ЭДС E направлена против приложенного к якорю напряжения (противо-ЭДС) и работа двигателя описывается уравнением электрического равновесия
U = E + RЯ IЯ .
При этом ток, потребляемый якорем двигателя из сети, или рабочий ток двигателя определяется уравнением
IЯ = (U — E)/ RЯ
Электрическая схема двигателя постоянного тока с параллельным возбуждением (РМ — рабочая машина)
30. Основные характеристики электродвигателей постоянного тока. Способы пуска и регулирования частоты вращения. Реверсирование и способы электрического торможения электродвигателей постоянного тока.
Основные характеристики двигателя постоянного тока с параллельным возбуждением
Свойства двигателей постоянного тока в основном определяются способом питания обмотки возбуждения. В связи с этим различают двигатели с независимым, параллельным, последовательным и смешанным возбуждением. В настоящее время в промышленности наиболее широкое применение получили двигатели с параллельным возбуждением.
В двигателе с параллельным возбуждением обмотка возбуждения подключена к питающей сети параллельно с обмоткой якоря. В цепь обмотки возбуждения последовательно включается регулировочный реостат RРР, а в цепь якоря — пусковой RПР или регулировочный R* реостат. Характерной особенностью двигателя является то, что ток возбуждения IB не зависит от тока якоря IЯ (тока нагрузки), т. е. при неизменном сопротивлении в цепи обмотки возбуждения, ток возбуждения постоянен IB = const.
Поэтому, пренебрегая размагничивающим действием реакции якоря, можно считать, что магнитный поток двигателя не зависит от нагрузки Ф = ФВ = const.
Бесколлекторный двигатель постоянного тока: принцип работы, устройство, применение
Бытовая и медицинская техника, авиамоделирование, трубозапорные приводы газо- и нефтепроводов – это далеко не полный перечень областей применения бесколлекторных двигателей (БД) постоянного тока. Давайте рассмотрим устройство и принцип действия этих электромеханических приводов, чтобы лучше понять их достоинства и недостатки.
Общие сведения, устройство, сфера применения
Одна из причин проявления интереса к БД — это возросшая потребность в высокооборотных микродвигателях, обладающих точным позиционированием. Внутренне устройство таких приводов продемонстрировано на рисунке 2.

Как видите, конструкция представляет собой ротор (якорь) и статор, на первом имеется постоянный магнит (или несколько магнитов, расположенных в определенном порядке), а второй оборудован катушками (В) для создания магнитного поля.
Примечательно, что эти электромагнитные механизмы могут быть как с внутренним якорем (именно такой тип конструкции можно увидеть на рисунке 2), так и внешним (см. рис. 3).

Соответственно, каждая из конструкций имеет определенную сферу применения. Устройства с внутренним якорем обладают высокой скоростью вращения, поэтому используются в системах охлаждения, в качестве силовых установок дронов и т.д. Приводы с внешним ротором используются там, где требуется точное позиционирование и устойчивость к перегрузкам по моменту (робототехника, медицинское оборудование, станки ЧПУ и т.д.).
 Бесколлекторный двигатель в компьютерном дисководе
Бесколлекторный двигатель в компьютерном дисководеПринцип работы
В отличие от других приводов, например, асинхронной машины переменного тока, для работы БД необходим специальный контроллер, который включает обмотки таким образом, чтобы векторы магнитных полей якоря и статора были ортогональны друг к другу. То есть, по сути, устройство-драйвер регулирует вращающий момент, действующий на якорь БД. Наглядно этот процесс продемонстрирован на рисунке 4.
 Фазы работы бесколлекторного привода
Фазы работы бесколлекторного приводаКак видим, для каждого перемещения якоря необходимо выполнять определенную коммутацию в обмотке статора двигателя бесколлекторного типа. Такой принцип работы не позволяет плавно управлять вращением, но дает возможность быстро набрать обороты.
Отличия коллекторного и бесколлекторного двигателя
Привод коллекторного типа отличается от БД как конструктивными особенностями (см. рис 5.), так и принципом работы.
 Рис. 5. А – коллекторный двигатель, В – бесколлекторный
Рис. 5. А – коллекторный двигатель, В – бесколлекторныйРассмотрим конструктивные отличия. Из рисунка 5 видно, что ротор (1 на рис. 5) двигателя коллекторного типа, в отличие от бесколлекторного, имеет катушки, у которых простая схема намотки, а постоянные магниты (как правило, два) установлены на статоре (2 на рис. 5). Помимо этого на валу установлен коллектор, к которому подключаются щетки, подающие напряжение на обмотки якоря.
Кратко расскажем о принципе работы коллекторных машин. Когда на одну из катушек подается напряжение, происходит ее возбуждение, и образуется магнитное поле. Оно вступает во взаимодействие с постоянными магнитами, это заставляет проворачиваться якорь и размещенный на нем коллектор. В результате питание подается на другую обмотку и цикл повторяется.
Частота вращения якоря такой конструкции напрямую зависит от интенсивности магнитного поля, которое, в свою очередь, прямо пропорционально напряжению. То есть, чтобы увеличить или уменьшить обороты, достаточно повысить или снизить уровень питания. А для реверса необходимо переключить полярность. Такой способ управления не требует специального контролера, поскольку регулятор хода можно сделать на базе переменного резистора, а обычный переключатель будет работать как инвертор.
Конструктивные особенности двигателей бесколлекторного типа мы рассматривали в предыдущем разделе. Как вы помните, их подключение требует наличия специального контролера, без которого они просто не будут работать. По этой же причине эти двигатели не могут использоваться как генератор.
Стоит также отметить, что в некоторых приводах данного типа для более эффективного управления отслеживаются положения ротора при помощи датчиков Холла. Это существенно улучшает характеристики бесколлекторных двигателей, но приводит к удорожанию и так недешевой конструкции.
Как запустить бесколлекторный двигатель?
Чтобы заставить работать приводы данного типа, потребуется специальный контроллер (см. рис. 6). Без него запуск невозможен.
 Рис. 6. Контроллеры бесколлекторных двигателей для моделизма
Рис. 6. Контроллеры бесколлекторных двигателей для моделизмаСобирать самому такое устройство нет смысла, дешевле и надежней будет приобрести готовый. Подобрать его можно по следующим характеристикам, свойственным драйверам шим каналов:
- Максимально допустимая сила тока, эта характеристика приводится для штатного режима работы устройства. Довольно часто производители указывают такой параметр в названии модели (например, Phoenix-18). В некоторых случаях приводится значение для пикового режима, который контролер может поддерживать несколько секунд.
- Максимальная величина штатного напряжения для продолжительной работы.
- Сопротивление внутренних цепей контроллера.
- Допустимое число оборотов, указывается в rpm. Сверх этого значения контроллер не позволит увеличить вращение (ограничение реализовано на программном уровне). Следует обратить внимание, что частота вращения всегда приводится для двухполюсных приводов. Если пар полюсов больше, следует разделить значение на их количество. Например, указано число 60000 rpm, следовательно, для 6-и магнитного двигателя частота вращения составит 60000/3=20000 prm.
- Частота генерируемых импульсов, у большинства контролеров этот параметр лежит в пределах от 7 до 8 кГц, более дорогие модели позволяют перепрограммировать параметр, увеличив его до 16 или 32 кГц.
Обратим внимание, что первые три характеристики определяют мощность БД.
Управление бесколлекторным двигателем
Как уже указывалось выше, управление коммутацией обмоток привода осуществляется электроникой. Чтобы определить, когда производить переключения, драйвер отслеживает положение якоря при помощи датчиков Холла. Если привод не снабжен такими детекторами, то в расчет берется обратная ЭДС, которая возникает в неподключенных катушках статора. Контроллер, который, по сути, является аппаратно-программным комплексом, отслеживает эти изменения и задает порядок коммутации.
Трёхфазный бесколлекторный электродвигатель постоянного тока
Большинство БД выполняются в трехфазном исполнении. Для управления таким приводом в контролере имеется преобразователь постоянного напряжения в трехфазное импульсное (см. рис.7).
 Рисунок 7. Диаграммы напряжений БД
Рисунок 7. Диаграммы напряжений БДЧтобы объяснить, как работает такой вентильный двигатель, следует вместе с рисунком 7 рассматривать рисунок 4, где поочередно изображены все этапы работы привода. Распишем их:
- На катушки «А» подается положительный импульс, в то время как на «В» — отрицательный, в результате якорь сдвинется. Датчиками зафиксируется его движение и подастся сигнал для следующей коммутации.
- Катушки «А» отключается, и положительный импульс идет на «С» («В» остается без изменения), далее подается сигнал на следующий набор импульсов.
- На «С» — положительный, «А» — отрицательный.
- Работает пара «В» и «А», на которые поступают положительный и отрицательный импульсы.
- Положительный импульс повторно подается на «В», и отрицательный на «С».
- Включаются катушки «А» (подается +) и повторяется отрицательный импульс на «С». Далее цикл повторяется.
В кажущейся простоте управления есть масса сложностей. Нужно не только отслеживать положение якоря, чтобы произвести следующую серию импульсов, а и управлять частотой вращения, регулируя ток в катушках. Помимо этого следует выбрать наиболее оптимальные параметры для разгона и торможения. Стоит также не забывать, что контроллер должен быть оснащен блоком, позволяющим управлять его работой. Внешний вид такого многофункционального устройства можно увидеть на рисунке 8.
 Рис. 8. Многофункциональный контроллер управления бесколлекторным двигателем
Рис. 8. Многофункциональный контроллер управления бесколлекторным двигателемПреимущества и недостатки
Электрический бесколлекторный двигатель имеет много достоинств, а именно:
- Срок службы значительно дольше, чем у обычных коллекторных аналогов.
- Высокий КПД.
- Быстрый набор максимальной скорости вращения.
- Он более мощный, чем КД.
- Отсутствие искр при работе позволяет использовать привод в пожароопасных условиях.
- Не требуется дополнительное охлаждение.
- Простая эксплуатация.
Теперь рассмотрим минусы. Существенный недостаток, который ограничивает использование БД – их относительно высокая стоимость (с учетом цены драйвера). К числу неудобств следует отнести невозможность использования БД без драйвера, даже для краткосрочного включения, например, чтобы проверить работоспособность. Проблемный ремонт, особенно если требуется перемотка.
Принцип работы двигателя постоянного тока
Принцип работы
Двигатели постоянного тока
На статоре находится индукторная обмотка (обмотка возбуждения), на которую подаётся постоянный ток — в результате создаётся постоянное магнитное поле (поле возбуждения). В двигателях с постоянными магнитами поле возбуждения создаётся постоянными магнитами.
В обмотку ротора (якорная обмотка) также подаётся постоянный ток, на который со стороны магнитного поля статора действует сила Ампера — создаётся вращающий момент, который поворачивает ротор на 90 электрических градусов, после чего щёточно-коллекторный узел коммутирует обмотки ротора – вращение продолжается.
По способу возбуждения двигатели постоянного тока делятся на четыре группы:
- С независимым возбуждением — обмотка возбуждения питается от независимого источника
- С параллельным возбуждением — обмотка возбуждения включается параллельно источнику питания обмотки якоря
- С последовательным возбуждением — обмотка возбуждения включена последовательно с обмоткой якоря
- Со смешанным возбуждением — у двигателя есть две обмотки: параллельная и последовательная.
Пуск двигателя постоянного тока
При прямом пуске ток якоря может на порядок превышать номинальный, поэтому при пуске в цепь якоря вводится пусковое сопротивление пусковой реостат. Для плавного пуска реостат делают ступенчатым — в первый момент включаются все ступени (максимальное сопротивление), по мере разгона двигателя растёт противо-ЭДС, ток якоря уменьшается — ступени выключаются одна за другой.
Регулирование скорости вращения двигателя постоянного тока
- Скорость ниже номинальной регулируется напряжением на якоре (мощность при этом пропорциональна скорости, момент неизменен)
- Скорость выше номинальной регулируется током обмотки возбуждения — чем слабее поле возбуждения, тем выше скорость (момент падает при постоянной мощности)
Регулирование питания якоря и обмотки возбуждения осуществляется с помощью тиристорных преобразователей (приводов постоянного тока).
Преимущества и недостатки двигателей постоянного тока
Преимущества:
- Практически линейные характеристики двигателя:
- механическая характеристика (зависимость частоты от момента)
- регулировочная характеристика (зависимость частоты от напряжения якоря)
- Просто регулировать частоту вращения в широких пределах
- Большой пусковой момент
- Компактный размер.
Недостатки:
- Дополнительные расходы на профилактическое обслуживание коллекторно-щёточных узлов
- Ограниченный срок службы из-за износа коллектора
- Дороже асинхронных двигателей.
Бесколлекторный двигатель постоянного тока: принцип работы, устройство, виды
Главная проблема коллекторных двигателей – это как раз-таки наличие коллекторного узла. Щётки стираются, а ламели изнашиваются, от слоя графитовой пыли между ними происходят замыкания, возникает искрение. Этих проблем нет в асинхронных машинах, но работать от постоянного тока они не могут. Бесколлекторный двигатель постоянного тока лишен обозначенных выше недостатков. О том, что это такое, как работает и где используются двигатели БДПТ мы и поговорим в этой статье.Определение
Бесколлекторным называют электродвигатель постоянного тока, ток в обмотках которого переключает специальное устройство-коммутатор — он носит название «драйвер» или «инвертор» и эти обмотки всегда расположены на статоре. Коммутатор состоит из 6 транзисторов, они и подают ток в ту или иную обмотку, в зависимости от положения ротора.
В отечественной литературе такие двигатели называют «вентильными» (потому что полупроводниковые ключи называют «вентилями»), и есть разделение таких электромашин на два вида по форме противо—ЭДС. В зарубежной литературе такое различие сохраняется, один из них называют аналогично русскому «BLDC» (brushless direct current drive или motor), что в дословном переводе звучит как «бесщёточный двигатель постоянного тока» в их обмотках возникает трапецеидальная ЭДС. Вентильные же электродвигатели с синусоидальной ЭДС называют PMSM (Permanent magnet synchronous machine), что переводится как «синхронный электродвигатель с возбуждением постоянными магнитами».
Устройство и принцип действия
Коллектор в КДПТ служит узлом переключения тока в обмотках якоря. В бесколлекторном электродвигателе постоянного тока (БДПТ) эту роль выполняют не щетки с ламелями, а коммутатор она полупроводниковых ключах — транзисторах. Транзисторы переключают обмотки статора, создавая вращающееся магнитное поле, которое взаимодействует с полем магнитов ротора. А при протекании тока через проводник, который находится в магнитном поле, на него действует сила Ампера, за счет действия этой силы и образуется крутящий момент на валу электрических машин. На этом и основан принцип работы любого электродвигателя.
 и бесколлекторного электродвигателя (справа)")
Теперь же разберемся в том, как устроен бесколлекторный двигатель. На статоре БДПТ обычно расположены 3 обмотки, по аналогии с электродвигателями переменного тока их часто называют трехфазными. Отчасти это верно: бесколлекторные двигатели работают от источника постоянного тока (чаще от аккумуляторов), но контроллер включает ток обмотках поочерёдно. Однако при этом не совсем верно говорить, что по обмоткам протекает переменный ток. Конечная форма питающего обмотки напряжения формируется прямоугольными импульсами управления транзисторами.
Трёхфазный бесколлекторный двигатель может быть трёхпроводными или четырёхпроводным, где четвертый провод — отвод от средней точки (если обмотки соединены по схеме звезды).

Обмотки или, говоря простым словами, катушки медного провода укладываются в зубы сердечника статора. В зависимости от конструкции и назначения привода на статоре может быть разное количество зубцов. Встречаются разные варианты распределения обмоток фаз по зубцам ротора, что иллюстрирует следующий рисунок.

Обмотки каждого из зубов в пределах одной фазы могут соединяться последовательно или параллельно, в зависимости от поставленных конструктору задач по мощности и моменту проектируемого привода, а сами же обмотки фаз соединяются между собой по схеме звезды или треугольника, подобно асинхронным или синхронным трёхфазными электродвигателям переменного тока.

В статоре могут устанавливаться датчики положения ротора. Часто используются датчики холла, они дают сигнал контроллеру, когда на них воздействует магнитное поле магнитов ротора. Это нужно для того чтобы контроллер «знал», в каком положении находится ротор и подавал питание на соответствующие обмотки. Это нужно для повышения эффективности и стабильности работы, а если кратко, — чтобы выжать из двигателя всю возможную мощность. Датчиков обычно устанавливается 3 штуки. Но наличие датчиков усложняет устройство бесколлекторного электродвигателя, к ним нужно проводить дополнительные провода для питания и линии данных.

В БДПТ для возбуждения используются постоянные магниты, установленные на роторе, а статор — это якорь. Напомним, что в коллекторных машинах наоборот (ротор — это якорь), а для возбуждения в КД используются как постоянные магниты, так и электромагниты (обмотки).
Магниты устанавливаются с чередованием полюсов, и соответственно их количество определяет количество пар полюсов. Но это не значит, что сколько магнитов, то столько же и пар полюсов. Несколько магнитов могут формировать один полюс. От числа полюсов, как в случае и с асинхронным двигателем (и другими) зависит число оборотов в минуту. То есть от одного контроллера на одинаковых настройках бесколлекторные двигатели с разным числом пар полюсов будут вращаться с разной скоростью.

Виды БДПТ
Теперь давайте разберемся, какими бывают бесколлекторные двигатели на постоянных магнитах. Их классифицируют по форме противо-ЭДС, конструкции, а также по наличию датчиков положения ротора. Итак, два основных типа отличающихся формой противо-ЭДС, которая наводится в обмотках при вращении ротора:
- BLDC — в них трапецеидальная противо-ЭДС;
- PMSM — противо-ЭДС синусоидальная.
В идеальном случае для них нужны разные источники питания (контроллеры), но на практике они взаимозаменяемы. Но если использовать контроллер с прямоугольными или трапецеидальным выходным напряжением с PMSM-двигателем, то будут слышны характерные звуки, похожие на стук во время вращения.
А по конструкции бесколлекторные двигатели постоянного тока бывают:
- С внутренним ротором. Это более привычное представление электродвигателя, когда статор — это корпус, а вращается вал, расположенный в нём. Часто их называют английским словом «Inrunner». Такой вариант обычно применяют для высокооборотистых электродвигателей
- С внешним ротором. Здесь вращается внешняя часть двигателя с закреплённым на ней валом, в англоязычных источниках его называют «outrunner». Эту схему устройства используют, когда нужен высокий момент.
Выбирают конструкцию в зависимости от того для чего нужен бесколлекторный двигатель в конкретном применении.
 и outrunner (справа)")
Современная промышленность выпускает бесколлекторные двигатели как с датчиками положения ротора, так и без них. Дело в том, что существует множество способов управления БДПТ, для некоторых из них нужны датчики положения, другие определяют положения по ЭДС в обмотках, третьи и вовсе просто подают питание на нужные фазы и электродвигатель самостоятельно синхронизируется с таким питанием и входит в рабочий режим.
Основные характеристики бесколлекторных двигателей постоянного тока:
- Режим работы — длительный или кратковременный.
- Максимальное рабочее напряжение.
- Максимальный рабочий ток.
- Максимальная мощность.
- Максимальные обороты, часто указывают не обороты, а KV — об/в, то есть количество оборотов на 1 вольт приложенного напряжения (без нагрузки на валу). Чтобы получить максимальные обороты — умножьте это число на максимальное напряжение.
- Сопротивление обмотки (чем оно меньше, тем выше КПД), обычно составляет сотые и тысячные доли Ома.
- Угол опережения фазы (timing) — время, через которое ток в обмотке достигнет своего максимума, это связано с её индуктивностью и законами коммутации (ток в индуктивности не может измениться мгновенно.
Схема подключения
Как было сказано выше, для работы бесколлекторного двигателя нужен специальный контроллер. На алиэкспресс можно найти как комплекты из двигателя и контроллера, так и по отдельности. Контроллер также называют ESC Motor или Electric Speed Controller. Выбирают их по силе тока, отдаваемого в нагрузку.
Обычно подключение электродвигателя к контроллеру не вызывает затруднений и понятно даже для чайников. Главное, что нужно знать — для смены направления вращения нужно изменить подключение любых двух фаз, собственно также, как и в трёхфазных асинхронных или синхронных электродвигателях.

В сети есть и ряд технических решений и схем как сложных, так и для чайников, которые вы можете увидеть ниже.
В этом видеоролике автор рассказывает, как подружить БК моторчик с «ардуиной».
А в этом ролике вы узнаете о различных способах подключения к разным регуляторам и как его можно сделать своими руками. Автор демонстрирует это на примере моторчика от HDD, и пары мощных экземпляров — inrunner и outrunner.
Кстати схему из видео для повторения также прикладываем:

Где применяются бесколлекторные двигатели
Сфера применения таких электродвигателей досрочно широка. Они используются как для привода мелких механизмов: в дисководах CD, DVD-приводах, жёстких дисках, так и в мощных устройствах: аккумуляторе и сетевом электроинструменте (с питанием порядка 12В), радиоуправляемых моделях (например, квадрокоптерах), станках ЧПУ для привода рабочего органа (обычно моторчики с номинальным напряжением 24В или 48В).
Широкое применение БДПТ нашли в электротранспорте, почти все современные мотор-колеса электросамокатов, велосипедов, мотоциклов и автомобилей — это бесколлекторные двигатели. К слову, номинальное напряжение электродвигателей для транспорта лежит в широком пределе, например, мотор-колесо для велосипеда зачастую работает от 36В или от 48В, за редким исключением и больше, а в автомобилях, например, на Toyota Prius порядка 120В, а на Nissan Leaf – доходит до 400, при том что заряжается от сети 220В (это реализуется с помощью встроенного преобразователя).
На самом деле область применения бесколлекторных электродвигателей очень обширна, отсутствие коллекторного узла позволяет его применять опасных местах, а также в местах с повышенной влажностью, без опасений замыканий, искрения или возгорания из-за дефектов в щеточном узле. Благодаря высокому КПД и хорошим массогабаритным показателям они нашли применение и в космической промышленности.
Преимущества и недостатки
Бесколлекторным двигателям постоянного тока, как и другим видам электромашин, присущи определенные достоинства и недостатки.
Преимущества у БДПТ заключаются в следующем:
- Благодаря возбуждению мощными постоянными магнитами (неодимовыми, например) превосходят по моменту и мощности и имеют меньшие габариты, чем асинхронные двигатели. Чем пользуется большинство производителей электротранспорта — от самокатов до автомобилей.
- Нет искрящего щеточно-коллекторного узла, который требует регулярного обслуживания.
- При использовании качественного контроллера в отличие от того же КД не выдают помехи в питающую сеть, что особенно важно в радиоуправляемых устройствах и транспорте с развитым электронным оборудованием в бортовой сети.
- КПД более 80, чаще и 90%.
- Высокая скорость вращения, в отдельных случаях до 100000 об/мин.
Но есть и существенный минус: бесколлекторный двигатель без контроллера — просто кусок железа с медной обмоткой. Он никак не сможет работать. Контроллеры стоят недешево и чаще всего их приходится заказывать в интернет-магазинах или с алиэкспресс. Из-за этого использовать БК-моторы в моделях и устройствах домашнего производства не всегда возможно.
Теперь вы знаете, что такое бесколлекторный двигатель постоянного тока, как он работает и где применяется. Надеемся, наша статья помогла вам разобраться во всех вопросах!
Материалы по теме:
Устройство и принцип действия ДПТ
Исследование двигателя постоянного тока независимого возбуждения
Электрические двигатели постоянного тока (ДПТ) отличает от других двигателей наличие специального механического коммутатора – коллектора. Несмотря на то, что из-за этого ДПТ менее надежны и дороже двигателей переменного тока, имеют большие габариты, они находят применение, когда их особые свойства имеют решающее значение. Часто ДПТ обладают преимуществами перед двигателями переменного тока по диапазону и плавности регулирования частоты вращения, по перегрузочной способности и экономичности, по возможности получения характеристик специального вида, и т.д.
В настоящее время ДПТ применяют в электроприводах прокатных станов, различных подъемных механизмов, металлообрабатывающих станков, роботов, на транспорте и т.д. ДПТ небольшой мощности используют в различных автоматических устройствах.
Устройство и принцип действия ДПТ
Внешний вид двигателя постоянного тока показан на рис. 1, а его поперечный разрез в упрощенном виде – на рис. 2. Как и любая электрическая машина, он состоит из двух основных частей – статора и ротора. Статор неподвижен, ротор вращается. Статор состоит из массивного стального корпуса 1, к которому прикреплены главные полюсы 2 и дополнительные полюсы 4. Главные полюсы 2 имеют полюсные наконечники, служащие для равномерного распределения магнитной индукции по окружности якоря. На главных полюсах размещают обмотки возбуждения 3, а на дополнительных – обмотки дополнительных полюсов 5.

Рис. 1. Внешний вид двигателя постоянного тока

Рис. 2. Поперечный разрез ДПТ (условное изображение): 1 – корпус; 2 – главные полюсы; 3 – обмотка возбуждения; 4 – дополнительные полюсы; 5 – обмотка дополнительных полюсов; 6 – якорь; 7 – обмотка якоря; 8 – щетки; 9 – коллектор; 10 – вал.
В пазах, расположенных на поверхности якоря 6, размещается обмотка якоря 7, выводы от которой присоединяют к расположенному на валу 10 коллектору 9. К коллектору с помощью пружин прижимаются графитные, угольно-графитные или медно-графитные щетки 8.
Обмотка возбуждения машины питается постоянным током и служит для создания основного магнитного поля, показанного на рис. 2 условно с помощью двух силовых линий, изображенных пунктиром. Дополнительные полюсы 4 уменьшают искрение между щетками и коллектором. Обмотку дополнительных полюсов 5 соединяют последовательно с обмоткой якоря 7 и на электрических схемах часто не изображают. На рис. 2 показана машина постоянного тока с двумя главными полюсами. В зависимости от мощности и напряжения машины могут иметь и большее число полюсов. При этом соответственно увеличивается число комплектов щеток и дополнительных полюсов.
У ДПТ с независимым возбуждением, как показано на рис. 3, электрические цепи обмоток якоря 1 и возбуждения 2 электрически не связаны и подключаются к различным источникам питания с напряжениями  и
и  . Как правило,
. Как правило,  . В общем случае последовательно с якорной обмоткой и обмоткой возбуждения могут быть включены дополнительные резисторы rд и rр (см. рис.3). Их назначение будет пояснено далее.
. В общем случае последовательно с якорной обмоткой и обмоткой возбуждения могут быть включены дополнительные резисторы rд и rр (см. рис.3). Их назначение будет пояснено далее.
Двигатели относительно небольшой мощности обычно изготавливают на одинаковые напряжения и . В этом случае цепи обмоток якоря и возбуждения соединяют между собой параллельно и подключают к общему источнику питания с напряжением  . Такие ДПТ называют двигателями параллельного возбуждения. Если мощность источника питания значительно превышает мощность двигателя, то процессы в якорной обмотке и в обмотке возбуждения протекают независимо. Поэтому такие двигатели являются частным случаем ДПТ независимого возбуждения и их свойства одинаковы.
. Такие ДПТ называют двигателями параллельного возбуждения. Если мощность источника питания значительно превышает мощность двигателя, то процессы в якорной обмотке и в обмотке возбуждения протекают независимо. Поэтому такие двигатели являются частным случаем ДПТ независимого возбуждения и их свойства одинаковы.

Рис. 3. Электрическая схема подключения ДПТ независимого возбуждения: 1 – цепь обмотки якоря; 2 – цепь обмотки возбуждения.
При подключении двигателя к источнику питания в обмотке якоря протекает ток Iя, который взаимодействует с магнитным полем, создаваемым обмоткой возбуждения. В результате этого возникает электромагнитный момент, действующий на якорь
 , (1)
, (1)
где k – коэффициент, зависящий от конструктивных параметров машины; Ф – магнитный поток одного полюса.
При превышении моментом М момента сопротивления нагрузки Мс якорь начинает вращаться с угловой скоростью w и в нем наводится ЭДС
 (2)
(2)
У двигателей полярность ЭДС Е противоположна полярности напряжения источника U, поэтому с ростом скорости w ток Iя уменьшается
 (3)
(3)
где rя – сопротивление якорной цепи двигателя при rд = 0.
Из соотношения (1) следует, что это приводит к снижению электромагнитного момента. При равенстве моментов  и
и  скорость вращения якоря перестает изменяться. Чтобы изменить направление вращения двигателя следует изменить полярность напряжения . Это приведет к изменению направления тока
скорость вращения якоря перестает изменяться. Чтобы изменить направление вращения двигателя следует изменить полярность напряжения . Это приведет к изменению направления тока  и направления момента . Двигатель начнет замедляться, а затем разгонится в обратную сторону.
и направления момента . Двигатель начнет замедляться, а затем разгонится в обратную сторону.
Пуск двигателя
В первое мгновение при пуске скорость двигателя w = 0 и в соответствии с формулой (2) ЭДС якоря Е = 0. Поэтому при подключении якоря двигателя к напряжению пусковой ток якоря  , как следует из формулы (3), ограничивается только сопротивлением якорной цепи rя (при rд=0)
, как следует из формулы (3), ограничивается только сопротивлением якорной цепи rя (при rд=0)
 (4)
(4)
Значение сопротивления  относительно невелико (обычно в пределах 1 Ом), поэтому если напряжение близко по значению к номинальному напряжению, значение пускового тока может в (10–30) раз превышать номинальное значение тока двигателя
относительно невелико (обычно в пределах 1 Ом), поэтому если напряжение близко по значению к номинальному напряжению, значение пускового тока может в (10–30) раз превышать номинальное значение тока двигателя  . Это недопустимо, поскольку ведет к сильному искрению и разрушению коллектора, а при частых пусках возможен перегрев обмотки якоря.
. Это недопустимо, поскольку ведет к сильному искрению и разрушению коллектора, а при частых пусках возможен перегрев обмотки якоря.
Как следует из формулы (4), одним из вариантов ограничения пускового тока является увеличение суммарного сопротивления якорной цепи ДПТ при неизменном значении напряжения U. Для этого последовательно с якорем включают дополнительный пусковой реостат (на рис. 3 не показан), который обычно выполняют в виде нескольких ступеней. Ступени пускового реостата выключают поэтапно по мере увеличения скорости двигателя. При этом в якоре двигателя за время пуска могут выделяться значительные потери мощности.
Более экономичным способом снижения пускового тока является пуск ДПТ при плавном увеличении напряжения на якоре U по мере разгона двигателя и увеличения ЭДС Е. Как следует из выражения (3), можно подобрать такой темп увеличения напряжения U, при котором ток на протяжении всего времени пуска не будет превышать допустимого значения. В лабораторной установке, используемой при выполнении данной работы, используется именно этот более экономичный способ ограничения пускового тока.
Дата добавления: 2016-06-29; просмотров: 7722;