Как определить мощность электродвигателя без бирки? Формула
При отсутствии техпаспорта или бирки на двигателе возникает вопрос: как узнать мощность электродвигателя без таблички или технической документации? Самые распространенные и быстрые способы, о которых мы расскажем в статье:
- По диаметру и длине вала
- По габаритам и крепежным размерам
- По сопротивлению обмоток
- По току холостого хода
- По току в клеммной коробке
- С помощью индукционного счетчика (для бытовых электродвигателей)
Определение мощности двигателя по диаметру вала и длине
Простейшие способы определения мощности и марки двигателя – габаритные размеры – вал или крепежные отверстия. В таблице указаны длины и диаметры валов (D1) и длина (L1) для каждой модели асинхронного промышленного трехфазного мотора. Перейти к подробным габаритным размерам электродвигателей АИР

| Р, кВт | 3000 об. мин | 1500 об. мин | 1000 об. мин | 750 об. мин | ||||
| D1, мм | L1, мм | D1, мм | L1, мм | >D1, мм | L1, мм | D1, мм | L1, мм | |
| 1,5 | 22 | 50 | 22 | 50 | 24 | 50 | 28 | 60 |
| 2,2 | 24 | 28 | 60 | 32 | 80 | |||
| 3 | 24 | 32 | 80 | |||||
| 4 | 28 | 60 | 28 | 60 | 38 | |||
| 5,5 | 32 | 80 | 38 | |||||
| 7,5 | 32 | 80 | 38 | 48 | 110 | |||
| 11 | 38 | 48 | 110 | |||||
| 15 | 42 | 110 | 48 | 110 | 55 | |||
| 18,5 | 55 | 60 | 140 | |||||
| 22 | 48 | 55 | 60 | >140 | ||||
| 30 | 65 | |||||||
| 37 | 55 | >60 | 140 | 65 | 75 | |||
| 45 | 75 | 75 | ||||||
| 55 | 65 | 80 | 170 | |||||
| 75 | 65 | 140 | 75 | 80 | 170 | |||
| 90 | 90 | |||||||
| 110 | 70 | 80 | 170 | 90 | ||||
| 132 | 100 | 210 | ||||||
| 160 | 75 | 90 | 100 | 210 | ||||
| 200 | ||||||||
| 250 | 85 | 170 | 100 | 210 | ||||
| 315 | — | — | ||||||
Проверить мощность по габаритам и крепежным размерам

Таблица подбора мощности двигателя по крепежным отверстиям на лапах (L10 и B10):
|
Р, кВт |
3000 об. |
1500 об. |
1000 об. |
750 об. |
||||
|
L10, мм |
B10, мм |
L10, мм |
B10, мм |
L10, мм |
B10, мм |
L10, мм |
B10, мм |
|
|
1,5 |
100 |
125 |
100 |
125 |
125 |
140 |
140 |
160 |
|
2,2 |
125 |
140 |
140 |
160 |
190 |
|||
|
3 |
125 |
140 |
112 |
160 |
190 |
|||
|
4 |
112 |
160 |
140 |
216 |
||||
|
5,5 |
140 |
190 |
216 |
178 |
||||
|
7,5 |
190 |
216 |
178 |
254 |
||||
|
11 |
178 |
216 |
178 |
254 |
210 |
|||
|
15 |
254 |
254 |
210 |
241 |
279 |
|||
|
18,5 |
210 |
210 |
241 |
279 |
|
318 |
||
|
22 |
203 |
279 |
203 |
279 |
267 |
318 |
310 |
|
|
30 |
241 |
241 |
310 |
311 |
356 |
|||
|
37 |
267 |
318 |
267 |
318 |
311 |
356 |
406 |
|
|
45 |
310 |
310 |
406 |
|
||||
|
75 |
311 |
406 |
311 |
406 |
368 |
457 |
419 |
457 |
|
90 |
349 |
349 |
419 |
406 |
508 |
|||
|
110 |
368 |
457 |
368 |
457 |
406 |
508 |
547 |
|
|
132 |
419 |
419 |
457 |
610 |
355 |
|||
|
160 |
406 |
508 |
406 |
508 |
610 |
355 |
||
|
200 |
457 |
457 |
560 |
610 |
||||
|
250 |
610 |
355 |
610 |
355 |
560 |
610 |
||
|
315 |
630/800 |
686/630 |
— |
— |
||||
Для фланцевых электродвигателей
Таблица для подбора мощности электродвигателя по диаметру фланца (D20) и диаметру крепежных отверстий фланца (D22)
|
Мощность электродвигателя P, кВт |
3000 об. |
1500 об. |
1000 об. |
750 об. |
||||
|
D20, мм |
D22, мм |
D20, мм |
D22, мм |
D20, мм |
D22, мм |
D20, мм |
D22, мм |
|
|
1,5 |
165 |
11 |
165 |
11 |
215 |
14 |
215 |
14 |
|
2,2 |
215 |
14 |
265 |
|||||
|
3 |
215 |
14 |
365 |
|||||
|
4 |
265 |
300 |
19 |
|||||
|
5,5 |
265 |
300 |
19 |
|||||
|
7,5 |
265 |
300 |
19 |
|||||
|
11 |
300 |
19 |
||||||
|
15 |
350 |
|||||||
|
18,5 |
350 |
400 |
||||||
|
22 |
350 |
350 |
400 |
|||||
|
30 |
500 |
|||||||
|
37 |
400 |
400 |
500 |
|||||
|
45 |
400 |
|||||||
|
55 |
500 |
500 |
550 |
24 |
||||
|
75 |
500 |
550 |
24 |
|||||
|
90 |
500 |
28 |
||||||
|
110 |
550 |
24 |
550 |
24 |
28 |
|||
|
132 |
550 |
680 |
||||||
|
160 |
550 |
28 |
28 |
680 |
||||
|
200 |
550 |
740 |
24 |
|||||
|
250 |
680 |
680 |
740 |
24 |
— |
|||
|
315 |
680 |
— |
||||||
Расчет по току
Электродвигатель подключается к сети и измеряется напряжение. С помощью амперметра поочередно замеряем ток в цепи каждой из обмоток статора. Сумму потребляемых токов умножаем на фиксированное напряжение. Полученное число – мощность электродвигателя в ваттах.

Как проверить мощность электродвигателя по току холостого хода
Проверить мощность по току холостого хода можно с помощью таблицы.
|
Р двигателя, кВт |
Ток холостого хода (% от номинального) |
||||
|
Обороты двигателя, об/мин |
|||||
|
600 |
750 |
1000 |
1500 |
3000 |
|
|
0,75-1,5 |
85 |
80 |
75 |
70 |
50 |
|
1,5-5,5 |
80 |
75 |
70 |
65 |
45 |
|
5,5-11 |
75 |
70 |
65 |
60 |
40 |
|
15-22,5 |
70 |
65 |
60 |
55 |
30 |
|
22,5-55 |
65 |
60 |
55 |
50 |
20 |
|
55-110 |
55 |
50 |
45 |
40 |
20 |
Расчет по сопротивлению обмоток
Соединение звездой. Измеряем сопротивление между выводами (1-2, 2-3, 3-1). Делим на 2 – получаем сопротивление одной обмотки. Мощность одной обмотки расчитывается так: P=(220V*220V)/R. Цифру умножаем на 3 (количество обмоток) – получаем мощность двигателя.
Соединение треугольником. Измеряем сопротивление в начале и в конце каждой обмотки. По той же формуле определяем мощность и умножаем на 6.
Статья о схемах подключения электродвигателей к сети
Если нет возможности определить мощность двигателя самостоятельно
Мы все же рекомендуем доверить определение мощности электродвигателя или подбор профессионалам. Это существенно сэкономит Ваше время и позволит избежать досадных ошибок в эксплуатации оборудования. Сервисный центр «Слобожанского завода» — профессиональный подбор двигателя, дефектовка, капитальный и текущий ремонт и перемотка электродвигателей любых типов и любой мощности. Доверяйте профессионалам.
1. Расчёт мощности электродвигателя по нагрузочной диаграмме методом эквивалентного тока (мощности, момента)…………………………………….
Определение режима работы электропривода по нагрузочной диаграмме…………………………………………………………………….
Расчёт эквивалентного тока (мощности, момента)………………………..
Предварительный выбор электродвигателя………………………………..
Окончательный выбор электродвигателя…………………………………..
Расчёт и выбор типа электродвигателей производственной установки…………………………………………………………………….
Разработка принципиальной схемы управления электроприводами…….
4 Расчёт и обоснование выбора аппаратуры…………………………………
4.1 Расчёт и обоснование выбора аппаратуры управления электрическими цепями………………………………………………………………………..
4.2 Расчёт и обоснование выбора аппаратуры защиты……………………….
4.3 Расчёт и обоснование выбора аппаратуры контроля параметров……….
4.4 Расчёт и обоснование выбора проводов и кабелей……………………….
5 Логическая схема управления электроприводами производственной установки……………………………………………
5.1 Разработка программы управления LOGO! с помощью программного обеспечения LOGO!Soft Comfort (Version2.0)…………………………….
6 Расчёт объёма памяти и обоснование выбора модели универсального логического модуля LOGO!………………………………………………………………..
6.1 Разработка принципиальной схемы подключения аппаратуры управления, защиты, контроля параметров, регулирования параметров электрических цепей, перемещения к логическому модулю LOGO!……..
Заключение………………………………………………………………………
Список использованных источников………………………………………….
Введение
Современная автоматизация производства невозможна без использования электрических двигателей и средств управления ими или, точнее, без применения электрического привода. Использование автоматизированного и автоматического электропривода позволяет повышать производительность труда.
Практически все предприятия в своем производстве имеют хотя бы небольшие и незначительные электропривода, предназначенные для решения различных задач (начиная от подъема некоторого груза или системы вентиляции, заканчивая большим производством, в котором связаны множество компонентов).
Современные предприятия представляют собой промышленные комплексы с большим потреблением электрической энергии. Следовательно, рациональное использование электроэнергии может быть обеспечено только при правильном выборе электрооборудования и грамотной его эксплуатации.
Каждый из электроприводов требует тщательный подход для определения электродвигателя, который обеспечит требуемые особенности, аппаратуры защиты и управления. При этом необходимо рассчитать и выбрать электродвигатель, подобрать аппаратуру защиты и управления, рассчитать и выбрать провода и кабели.
1 Расчёт мощности электродвигателей по нагрузочной диаграмме методом эквивалентного тока (мощности, момента)
1.1 Определение режима работы электродвигателей по нагрузочным диаграммам
Исходные данные для выбора мощности двигателя определяют по нагрузочным диаграммам. Нагрузочными диаграммами называются зависимости мощности, вращающего момента или тока от времени. В данной работе расчет ведется по нагрузочным диаграммам, на которых приведена зависимость мощности и момента от времни.
Для каждой рабочей машины характерна своя нагрузочная диаграмма, которая определяется условиями ее работы. Эти нагрузочные диаграммы обуславливают различные режимы электроприводов.
Для более точных расчетов и выбора двигателей по мощности и моменту произвольные нагрузочные диаграммы приводятся к диаграммам, которые классифицируются на восемь номинальных режимов и обозначаются S1-S8.
— Определение режима работы электродвигателя привода шлифовального круга (М1).
На рисунке 1, задание на курсовой проект, изображена нагрузочная диаграмма для данного двигателя. По данной диаграмме определяем, что двигатель М1 работает в режиме S1. Длительный режим (S2) – при этом режиме работа двигателя происходит без перерыва с постоянной нагрузкой, причем рабочий период настолько велик, что нагрев двигателя достигает установившейся температуры.
— Определение режима работы электродвигатель привода горизонтальной подачи стола (М2).
На рисунке 2, в задание на курсовой проект, изображена нагрузочная диаграмма для данного двигателя. По данной диаграмме определяем, что двигатель М2 работает в режиме S2.
— Определение режима работы электродвигатель привода вертикальной подачи стола (М3).
На рисунке 2, в задание на курсовой проект, изображена нагрузочная диаграмма для данного двигателя. По данной диаграмме определяем, что двигатель М3 работает в режиме S2.
1.2 Расчёт эквивалентного тока (мощности, момента)
Расчет эквивалентной мощности электродвигателя привода шлифовального круга (М1).
Используя таблицу 1, вычислим эквивалентную мощность по формуле (1):
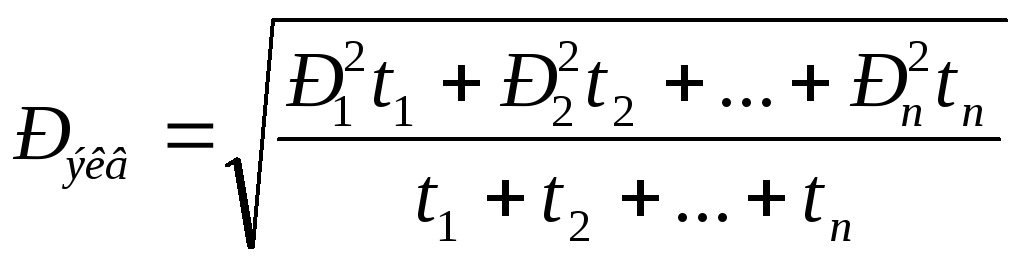 ;
(1)
;
(1)
г де
Р1 – среднее значение мощности на первом
временном участке, кВт;
де
Р1 – среднее значение мощности на первом
временном участке, кВт;
Р2 – среднее значение мощности на втором временном участке, кВт;
Рn – среднее значение мощности на n-ом временном участке, кВт;
t1 — продолжительность времени работы на первом временном участке при среднем значении момента, равном T1, мин;
t2 – продолжительность времени работы на втором временном участке при среднем значении момента, равном T2, мин;
tn – продолжительность времени работы на n-ом временном участке при среднем значении момента, равном Tn, мин.

Расчет эквивалентной мощности электродвигатель привода горизонтальной подачи стола (М2).
Используя таблицу 2, вычислим эквивалентную мощность по формуле (1):

Расчет эквивалентной мощности электродвигатель привода вертикальной подачи стола (М3).
Используя таблицу 3, вычислим эквивалентную мощность по формуле (1):

1.3 Предварительный выбор электродвигателя
— Выбор работы электродвигателя привода шлифовального круга (М1).
Двигатель
М1 работает в длительном
режиме
(S2),
является 3х – фазным, асинхронным двигателем с
к.з.р., нереверсивный. При выборе двигателя
должны выполняться условия  ,
, .
.
Исходя из рассчитанной мощности, выбираем двигатель 4А132М8УЗ, технические и пусковые данные которого приведены в таблице 3.
Таблица 4 – Технические и пусковые данные двигателя
Тип двигателя | P2н , кВт | ,% | cos | Sн,% | Sк,% |
|
|
|
|
4А100L2У3 | 5.5 | 87.5 | 0.91 | 3.4 | 29.0 | 2.5 | 1.6 | 2.0 | 7.5 |
— Выбор работы электродвигатель привода горизонтальной подачи стола (М2).
Двигатель
М2 работает в длительном
режиме
(S2),
является 3х – фазным, асинхронным двигателем с
короткозамкнутым ротором, реверсивным.
При выборе двигателя должны выполняться
условия  ,
, .
.
Исходя из рассчитанной мощности, выбираем двигатель, технические и пусковые данные которого приведены в таблице 4.
Таблица 5 – Технические и пусковые данные двигателя
Тип двигателя | P2н , кВт | ,% | cos | Sн,% | Sк,% |
|
|
|
|
4A112MB8У3 | 3.0 | 79.5 | 0.74 | 5.8 | 35.0 | 2.2 | 1.5 | 1.9 | 5.0 |
— Выбор работы электродвигатель привода вертикальной подачи стола (М2).
Двигатель
М3 работает в длительном
режиме
(S2),
является 3х – фазным, асинхронным двигателем с
короткозамкнутым ротором, реверсивным.
При выборе двигателя должны выполняться
условия  ,
, .
.
Исходя из рассчитанной мощности, выбираем двигатель, технические и пусковые данные которого приведены в таблице 4.
Таблица 6 – Технические и пусковые данные двигателя
Тип двигателя | P2н , кВт | ,% | cos | Sн,% | Sк,% |
|
|
|
|
4A132M8У3 | 5.5 | 83.0 | 0.74 | 4.1 | 25.0 | 2.6 | 1.7 | 1.9 | 5.5 |
1.4 Окончательный выбор электродвигателей
Выбираем электродвигателя привода шлифовального круга (М1) серии 4А100L2У3:
— По условию задания выбираем двигатель с коротко замкнутым ротором.
— Номинальная частота вращения 3000 об/мин.
— Двигатель выбран с данной мощностью, потому что в номинальном ряде мощностей имеется только такая минимальная мощность. Использование двигателей завышенной мощности является нежелательным, так как при этом увеличивается не только первоначальная стоимость электропривода, но увеличиваются и потери энергии за счёт снижения коэффициента полезного действия.
— Способ монтажа IM1001 — двигатели на лапах, с подшипниковыми щитами, с одним цилиндрическим концом вала, для сокращения передаточных кинематических звеньев. Используем клиноременную передачу для передачи вращения механизма шлифования.
— Степень защиты IP44. Такая степень защиты не позволяет попадать отходом шлифования, в виде металлической пыли и брызг охлаждающей жидкости (водяных брызг), внутрь электродвигателя, которые образуется в результате работы продольно-шлифовального станка.
— Способ охлаждения IC141 по ГОСТ 20459-75. Данный способ охлаждения выбрали, потому что электродвигатель имеет ребристую станину. Она позволяет лучше отводит тепло, по сравнению с ровной станиной машин постоянного тока, исходя из того, что у нее за счет ребер увеличивается площадь поверхности, а следовательно и теплоотдача. Поэтому для электродвигателя достаточно, чтобы охлаждение осуществлял установленный на валу центробежный вентилятор, сверху обдувающий станину.
Выбираем электродвигатель привода горизонтальной подачи стола (М2) серии 4A112MB8У3:
— По условию задания выбираем асинхронный двигатель с коротко замкнутым ротором.
— Номинальная частота вращения 750 об/мин. Малые обороты электродвигателя позволят нам использовать меньше передаточных звеньев для связи с рабочим органом, или выбирать передаточные звенья такие, чтобы их КПД передачи были максимальными. Чем меньше обороты электродвигателя, тем больший момент обеспечивается на валу.
— Способ монтажа IM1001 — двигатели на лапах, с подшипниковыми щитами, с одним цилиндрическим концом вала, для сокращения передаточных кинематических звеньев. Используем клиноременную передачу.
— Степень защиты IP44. Такая степень защиты не позволяет попадать отходом шлифования, в виде металлической пыли и брызг охлаждающей жидкости (водяных брызг), внутрь электродвигателя, которые образуется в результате работы продольно-шлифовального станка.
— Способ охлаждения IC141 по ГОСТ 20459-75. Данный способ охлаждения выбрали, потому что электродвигатель имеет ребристую станину. Она позволяет лучше отводит тепло, по сравнению с ровной станиной машин постоянного тока, исходя из того, что у нее за счет ребер увеличивается площадь поверхности, а следовательно и теплоотдача. Поэтому для электродвигателя достаточно, чтобы охлаждение осуществлял установленный на валу центробежный вентилятор, сверху обдувающий станину.
Выбираем электродвигатель привода вертикальной подачи стола (М3) серии 4A132M8У3:
— По условию задания выбираем асинхронный двигатель с коротко замкнутым ротором.
— Номинальная частота вращения 750 об/мин. Малые обороты электродвигателя позволят нам использовать меньше передаточных звеньев для связи с рабочим органом, или выбирать передаточные звенья такие, чтобы их КПД передачи были максимальными. Чем меньше обороты электродвигателя, тем больший момент обеспечивается на валу.
— Способ монтажа способ IM1001 — двигатели на лапах, с подшипниковыми щитами, с одним цилиндрическим концом вала, для сокращения передаточных кинематических звеньев. Используем клиноременную передачу.
— Степень защиты IP44. Такая степень защиты не позволяет попадать отходом шлифования, в виде металлической пыли и брызг охлаждающей жидкости (водяных брызг), внутрь электродвигателя, которые образуется в результате работы продольно-шлифовального станка.
— Способ охлаждения IC141 по ГОСТ 20459-75. Данный способ охлаждения выбрали, потому что электродвигатель имеет ребристую станину. Она позволяет лучше отводит тепло, по сравнению с ровной станиной машин постоянного тока, исходя из того, что у нее за счет ребер увеличивается площадь поверхности, а следовательно и теплоотдача. Поэтому для электродвигателя достаточно, чтобы охлаждение осуществлял установленный на валу центробежный вентилятор, сверху обдувающий станину.
2 Расчёт и выбор типа электродвигателей производственной установки
Расчет и выбор электродвигателя привода насоса подачи охлаждающей жидкости (М4).
О наболевшем — Или расчет силы тока трехфазных асинхронных двигателей на 380В: antno — LiveJournal
Идея этого поста родилась после многочисленных доставалок «сильно грамотных» инженеров на тему о том, что на двигатель мощностью, ну например 15 квт надо ставить автомат не ниже 50А, ибо номинал тока 40А + запас на пусковые токи, бла блаблаблабла…Это типичная ошибка тех, кто пытается считать мощность трехфазных асинхронников по стандартной формуле мощности I=P\U, при этом в расчет не берется ни то что двигатель трехфазный, ни то что у него еще есть непонятные почти никому Косинус Фи и КПД.Кстати при установке новых двигателей ничего и считать не надо, как правило номинальный ток для обоих режимов (звезда 380 и треугольник 220) указан на шильдике, вместе со всеми остальными параметрами.
Так какже, правильно расчитать, грубо или поточнее мощность асинхронного двигателя в стандартной ситуации?
Для начала определимся с это самой «стандартной ситуацией» и с чем ее едят.
Стандартной я называю ситуацию, когда двигатель расчитанный на 380\220 звезда\треугольник, подключается на стандартные 380 звездой, на все три фазы. В промышленности это встречается наиболее часто, и также часто вызывает вопросы по поводу того, какого номинала автоматы ставить, ибо многие, знают стандартную формулу мощности I=P\U и почемуто, видимо от большой грамотности или большого ума, от которого горе по Грибоедову, начинают для трехфазной нагрузки применять ее.
А теперь раскрываю секрет, страааашный секрет….
Для расчета защиты маломощных двигателей на 380В, мощностью до 30 квт вполне достаточно умножить мощность ровно на 2, то есть P*2=~In , автомат все равно выбирается ближайший по номиналу в большую сторону, то есть 63А для 30 квт двигателя, имеющего на валу нагрузкой ну скажем турбину вентилятора типа Циклон. Это страаашный, нигде в учебниках не озвученный секретный экспресс-метод грубого расчета силы тока двигателей на 380В…Почему так? Очень просто при U=380В на один КВТ мощности приходится примерно сила тока в 2 Ампера. (Да меня щас побьют теоретики, которые помнят про КПД и Косинус ФИ…Помолчите Господа, пока помолчите, я же сказал, для МАЛОМОЩНЫХ двигателей до 30 квт, а для низких мощностей, зная модельный ряд наших автоматов, эти 2 значения можно и не учитывать, особенно если нагрузка на вал минимальная)
А теперь представим типовой двигатель* со следующими параметрами:
P=30 квт
U=380 В
сила тока на шильдике стерлась…
cos φ = 0,85
КПД=0,9
Как найти его силу тока? Если считать так, как советуют и сами считают упрямые «очень умные» горе-инженера, особенно любящие озадачивать этим вопросом на собеседованиях, то получаем цифру в 78,9А, после чего горе-инженера начинают лихорадочно вспоминать про пусковые токи, задумчиво хмурить брови и морщить лбы, а затем не стесняясь требуют поставить автомат минимум на 100А, так как ближайший по номиналу 80А будет выбивать при малейшей попытке запуска офигенными пусковыми токами…И переспорить их очень тяжело, так как все нижеследующее вызывает у умных дяденек бурю эмоций, недержание мочи и кала, разрыв шаблона, и погружение в глубокий транс с причитаниями и маханием корочками тех универов где они учились считать и жить..
если считать грубо, то 30*2=60А
Более полная формула, рекомендованная к применению выглядит несколько иначе.
Мощность в квт переводится в ватты, для чего 30*1000=30000 вт
Затем ватты делим на напряжение, затем делим на корень квадратный из 3(1,73), (у нас же ТРИ ФАЗЫ) и получаем примерную силу тока, которую нужно уточнить, поделив дополнительно на cos φ(коэффициент мощности, ибо всякая индуктивная нагрузка имеет и реактивную мощность Q) и затем, уточнить еще раз, поделив при желании на КПД, итак:
30000вт\380в\1,73=45,63 А\0,85=53,6А
Уточняем расчет: 53,6А\0,9 = 59,65А (Кстати программа электрик, считающая по похожей формуле, выдает более точные данные 59,584 А, то есть немного меньше чем мой проверенный временем расчет…то есть расчет довольно точен, а расхождения в десятые и сотые доли ампера в нашем случае никого особо не волнуют, почему — написано ниже)
59,65 Ампер, — почти полное совпадение с первым грубым расчетом, расхождение составляет всего лишь -0,35А, что для выбора автомата защиты не играет никакой роли в данном случае. Ну и какой же автомат выбрать??
При условии что нагрузка на валу не велика, скажем какая нибудь турбина вентилятора, можно смело ставить ВА 47-29 на 63А фирмы ИЭК, категории С..наиболее часто встречающиеся.
На вопли о пусковых токах могу смело ответить, что 63А пакетник категории В,С,D выдерживает по току превышение 1,13 раза дольше часа и 1,45 раза меньше часа, то есть если на автомате написано 63А, то это не значит, что при броске до 70А его сразу выбьет…Нифига подобного, нагрузку в 113% (сила тока равна 71,19А) он будет держать минимум час, особенно это касается дорогих автоматов фирм Легранд\АВВ, и даже при силе тока в 145% номинала = 91,35А он гарантированно продержит несколько минут, а для раскрута асинхронника и выхода на номинальный режим достаточно нескольких секунд, как правило от 5 до 20 секунд. За это время тепловой расцепитель автомата тупо не успеет разогрется и отключить нагрузку.
Конечно, умные дяди мне сейчас напомнят, что у автомата есть еще электромагнитный расцепитель, и уж он то, ну уж он то точно отрубит при превышении 63А несчастный двигатель…Хахаха, хрен вам и горе умное…
Буковки B,C,D, и некоторые другие в наименовании автомата как раз характеризуют кратность уставки электромагнитного расцепителя, и равна она
В — 3…5
С — 5…10
D — по ГОСТ Р — 10…50, большинство производителей заявляет диапазон 10…20.
Есть более редко встречающиеся
G — 6,4…9,6 (КЭАЗ ВМ40)
K — 8…14
L — 3,2…4,8 (КЭАЗ ВМ40)
Z — 2…3
То есть автомат категории С на 63А гарантированно отключится электромагнитным расцепителем только в диапазоне 315-630А и выше, чего при запуске исправного асинхронника на 30 квт никогда все равно не будет.
Второй законный вопрос- какой провод положить на наш двигатель. Ответ- кабель 4х16 миллиметров квадратных, с лихвой хватит, при длине до 50 метров, при большей длине лучше 25мм выбирать, ибо потери.
Все цифры проверены многократно, лично мной, и экспериментально. Проверены и по выбранным автоматам и по многократным замерам реальной силы тока токовыми клещами.
*-Единственное примечание и уточнение: У старых двигателей советского производства, вновь вводимых в эксплуатацию могут быть меньшие значения косинуса фи и КПД, тогда сила тока может быть чуть выше чем значение грубого расчета. Просто выбирается следующий по номиналу автомат на 80А. Не ошибётесь!
Второе примечание:
Для грубого расчета силы тока двигателя подключенного треугольником к сети 220 через конденсатор, можно взять мощность двигателя в Киловаттах, ну например теже 30 КВТ и умножить примерно на 3,9 и так: 30*3,9=117А
А для расчета конденсатора можно воспользоваться сайтом http://www.skrutka.ru/sk/tekst.php?id=13
и посмотреть что приведенный расчет тока не сильно грешит
Расчетные формулы основных параметров асинхронных двигателей
В таблице 1 представлены расчетные формулы для определения основных параметров асинхронных двигателей.
В данной таблице собраны все формулы, которые касаются расчета параметров асинхронных двигателей.
Используя формулы из данной таблицы, вам больше не придется искать нужную формулу в различных справочниках.
Таблица 1 — Расчетные формулы для определения основных параметров асинхронных двигателей
| Наименование величин | Формулы | Принятые обозначения |
|---|---|---|
| Потребляемая активная мощность из сети, кВт |
| U1, I1 – линейные значения напряжения, В и тока двигателя, А; cosϕ – коэффициент мощности; |
| Потребляемая реактивная мощность, квар |
| |
| Полезная мощность на валу, кВт |
| Ƞ — КПД двигателя; |
| Потребляемый двигателем ток, А |
| |
| Вращающий момент двигателя, кГм |
| nном. – номинальная скорость вращения ротора, об/мин; |
| Синхронная скорость вращения магнитного поля, об/мин |
| f1 – частота питающего тока, Гц; р – число пар полюсов машины; |
| Скольжение двигателя |
| |
| Скорость вращения ротора при нагрузке, об/мин |
| |
| ЭДС обмоток статора и ротора, В |
| kоб.1, kоб.2 – обмоточные коэффициенты статора и ротора, равные произведению коэффициентов укорочения kу шага и распределения обмотки kw; kоб. = kу* kw; |
| Коэффициенты трансформации по напряжению и по току |
| w1, w2 – числа витков обмоток статора и ротора; m1, m2 – числа фаз в обмотках статора и ротора. У двигателей с фазным ротором. m2 = 3 у двигателей с короткозамкнутым ротором; m2 = z2, т.е. числу пазов в роторе. |
| Параметры схемы замещения |
| zк, rк, хк – полное, активное и индуктивное сопротивления при КЗ двигателя, Ом; Iп – пусковой ток двигателя, А; ∆Рк – суммарные потери в меди статора и ротора двигателя, Вт; r1, x1 – активное и индуктивное сопротивления обмотки статора, Ом; r2’, x2’ – активные и индуктивные сопротивления ротора, приведенные к обмотке статора, Ом; |
| Ток холостого хода, А |
| Iном. – номинальный ток двигателя, А |
| Критическое скольжение |
| sinϕ – коэффициент реактивной мощности; kм – коэффициент перегрузочной способности; |
| Уравнение вращающего момента |
| Sном. – скольжение при номинальной нагрузке |
| Скольжение двигателя s2 при введении добавочного сопротивления в ротор |
| |
| КПД двигателя при введении добавочного сопротивления в ротор |
| |
| Критический максимальный момент, развиваемый в двигательном (+) и генераторном (-) режимах, кГм |
| U1ф – фазное напряжение, В |
| Уравнение вращающего момента при добавочном сопротивлении в цепи ротора |
|
|





Литература:
1. Справочная книга электрика. В.И. Григорьева, 2004 г.
активное сопротивление двигателя, полное сопротивление двигателя, реактивное сопротивление двигателя, ток двигателяПоделиться в социальных сетях
Благодарность:
Если вы нашли ответ на свой вопрос и у вас есть желание отблагодарить автора статьи за его труд, можете воспользоваться платформой для перевода средств «WebMoney Funding».
Данный проект поддерживается и развивается исключительно на средства от добровольных пожертвований.
Проявив лояльность к сайту, Вы можете перечислить любую сумму денег, тем самым вы поможете улучшить данный сайт, повысить регулярность появления новых интересных статей и оплатить регулярные расходы, такие как: оплата хостинга, доменного имени, SSL-сертификата, зарплата нашим авторам.
Как узнать мощность электродвигателя по сопротивлению обмоток — MOREREMONTA
При замене сломанного советского электродвигателя на новый, часто оказывается, что на нем нет шильдика. Нам часто задают вопросы: как узнать мощность электродвигателя? Как определить обороты двигателя? В этой статье мы рассмотрим, как определить параметры электродвигателя без бирки — по диаметру вала, размерам, току.
Заказать новый электродвигатель по телефону
Как определить мощность?
Существует несколько способов определения мощности электродвигателя: диаметру вала, по габариту и длине, по току и сопротивлению, замеру счетчиком электроэнергии.
По габаритным размерам
Все электродвигатели отличаются по габаритным размерам. Определить мощность двигателя можно сравнив габаритные размеры с таблицей определения мощности электродвигателя, перейдя по ссылке габаритно-присоединительные размеры электродвигателей АИР.
 Какие размеры необходимо замерить:
Какие размеры необходимо замерить:
- Длина, ширина, высота корпуса
- Расстояние от центра вала до пола
- Длина и диаметр вала
- Крепежные размеры по лапам (фланцу)
По диаметру вала
Определение мощности электродвигателя по диаметру вала — частый запрос для поисковых систем. Но для точного определения этого параметра недостаточно – два двигателя в одном габарите, с одинаковыми валами и частотой вращения могут иметь различную мощность.
Таблица с привязкой диаметров валов к мощности и оборотам для двигателей АИР и 4АМ.
| Мощность электродвигателя Р, кВт | Диаметр вала, мм | |||
| 3000 об/мин | 1500 об/мин | 1000 об/мин | 750 об/мин | |
| 1,5 | 22 | 22 | 24 | 28 |
| 2,2 | 24 | 28 | 32 | |
| 3 | 24 | 32 | ||
| 4 | 28 | 28 | 38 | |
| 5,5 | 32 | 38 | ||
| 7,5 | 32 | 38 | 48 | |
| 11 | 38 | 48 | ||
| 15 | 42 | 48 | 55 | |
| 18,5 | 55 | 60 | ||
| 22 | 48 | 55 | 60 | |
| 30 | 65 | |||
| 37 | 55 | 60 | 65 | 75 |
| 45 | 75 | 75 | ||
| 55 | 65 | 80 | ||
| 75 | 65 | 75 | 80 | |
| 90 | 90 | |||
| 110 | 70 | 80 | 90 | |
| 132 | 100 | |||
| 160 | 75 | 90 | 100 | |
| 200 | ||||
| 250 | 85 | 100 | ||
| 315 | — | |||
По показанию счетчика
Как правило измерение счетчика отображаются в киловаттах (далее кВт). Для точности измерения стоит отключить все электроприборы или воспользоваться портативным счетчиком. Мощность электродвигателя 2,2 кВт, подразумевает что он потребляет 2,2 кВт электроэнергии в час.
Для измерения мощности по показанию счетчика нужно:
- Подключить мотор и дать ему поработать в течении 6 минут.
- Замеры счетчика умножить на 10 – получаем точную мощность электромотора.
Расчет мощности по току
Для начала нужно подключить двигатель к сети и замерить показатели напряжения. Замеряем потребляемый ток на каждой из обмоток фаз с помощью амперметра или мультиметра. Далее, находим сумму токов трех фаз и умножаем на ранее замеренные показатели напряжения, наглядно в формуле расчета мощности электродвигателя по току.
- P – мощность электродвигателя;
- U – напряжение;
- Ia – ток 1 фазы;
- Ib – 2 фазы;
- Ic – 3 фазы.
Определение оборотов вала
Асинхронные трехфазные двигатели по частоте вращения ротора делятся 4 типа: 3000, 1500, 1000 и 750 об. мин. Приводим пример маркировки на основании АИР 180:
- АИР 180 М2 – где 2 это 3000 оборотов.
- АИР 180 М4 – 4 это 1500 об. мин.
- АИР 180 М6 – 6 обозначает частоту вращения 1000 об/мин.
- АИР 180 М8 – 8 означает, что частота вращения выходного вала 750 оборотов.
Самый простой способ определить количество оборотов трехфазного асинхронного электродвигателя – снять задний кожух и посмотреть обмотку статора.

У двигателя на 3000 об/мин катушка обмотки статора занимает половину окружности — 180 °, то есть начало и конец секции параллельны друг другу и перпендикулярны центру. У электромоторов 1500 оборотов угол равен 120 °, у 1000 – 90 °. Схематический вид катушек изображен на чертеже. Все обмоточные данные двигателей смотрите в таблице.
Узнать частоту вращения с помощью амперметра
Узнать обороты вала двигателя, можно посчитав количество полюсов. Для этого нам понадобится миллиамперметр — подключаем измерительный прибор к обмотке статора. При вращении вала двигателя стрелка амперметра будет отклонятся. Число отклонений стрелки за один оборот – равно количеству полюсов.
- 2 полюса – 3000 об/мин
- 4 полюса – 1500 об/мин
- 6 полюса – 2000 об/мин
- 8 полюса – 750 об/мин
Если не получилось узнать мощность и обороты
Если не получилось узнать мощность и обороты электродвигатели или вы не уверены в измерениях – обращайтесь к специалистам «Систем Качества». Наши специалисты помогут подобрать нужный мотор или провести ремонт сломанного электродвигателя АИР.
Определение мощности электродвигателя без бирки
При отсутствии техпаспорта или бирки на двигателе возникает вопрос: как узнать мощность электродвигателя без таблички или технической документации? Самые распространенные и быстрые способы, о которых мы расскажем в статье:
- По диаметру и длине вала
- По габаритам и крепежным размерам
- По сопротивлению обмоток
- По току холостого хода
- По току в клеммной коробке
- С помощью индукционного счетчика (для бытовых электродвигателей)
Определение мощности двигателя по диаметру вала и длине
Простейшие способы определения мощности и марки двигателя – габаритные размеры – вал или крепежные отверстия. В таблице указаны длины и диаметры валов (D1) и длина (L1) для каждой модели асинхронного промышленного трехфазного мотора. Перейти к подробным габаритным размерам электродвигателей АИР
1. Какие электродвигатели применяются чаще всего?
Наиболее распространены асинхронные электродвигатели с короткозамкнутым ротором. Они имеют сравнительно простую конструкцию и относительно недороги.
Для работы асинхронного двигателя требуется трехфазное напряжение, создающее на обмотках статора вращающееся магнитное поле. Это поле приводит в движение ротор двигателя, который передает крутящий момент на нагрузку, например, на пропеллер вентилятора или редуктор конвейера. Изменяя конфигурацию обмоток статора, можно менять основные характеристики привода – частоту оборотов и мощность на валу. В случае работы асинхронного электродвигателя в однофазной сети применяют фазосдвигающие и пусковые конденсаторы.

Также в настоящее время находят применение двигатели постоянного тока. Данные приводы имеют щетки, подверженные износу и искрению. Кроме того, необходима обмотка подмагничивания (возбуждения), на которую подается постоянное напряжение. Несмотря на эти недостатки, электродвигатели постоянного тока используются там, где необходимо быстрое изменение скорости вращения и контроль момента, а также при мощностях более 100 кВт.
В быту также применяют коллекторные (щеточные) электродвигатели переменного тока, которые имеют низкую надежность по сравнению с асинхронными.
2. Какие способы управления электродвигателями используются на практике?
Управление электродвигателем подразумевает возможность изменения его скорости и мощности. Так, если на асинхронный двигатель подать напряжение заданной величины и частоты, он будет вращаться с номинальной скоростью и сможет обеспечить мощность на валу не более номинала. Если же нужно понизить или повысить скорость электродвигателя, используют преобразователи частоты. ПЧ может обеспечить нужный режим разгона и торможения, а также позволит оперативно управлять частотой работы.
Для обеспечения требуемого разгона и торможения без изменения рабочей частоты применяют устройство плавного пуска (УПП). Если нужно управлять только разгоном двигателя, используют схему включения «звезда-треугольник».
Для запуска двигателей без ПЧ и УПП широко применяются контакторы, которые позволяют дистанционно управлять пуском, остановом и реверсом.
3. Как прозвонить электродвигатель и определить его сопротивление?
Асинхронный электродвигатель, как правило, имеет три обмотки. У каждой обмотки есть по два вывода, которые должны быть обозначены в клеммной коробке двигателя. Если выводы обмоток известны, то можно легко прозвонить каждую из них и сравнить величину сопротивления с остальными обмотками. Если величины сопротивлений отличаются не более, чем на 1%, то скорее всего, обмотки исправны.
Сопротивление обмоток электродвигателя измеряется с помощью омметра, как и сопротивление обмоток трансформатора. Чем больше мощность двигателя, тем меньше сопротивление его обмоток, и наоборот.
4. Как определить мощность электродвигателя?
Проще всего определить номинальную мощность электродвигателя по шильдику. На нем указана механическая мощность (мощность на валу), значение которой всегда меньше потребляемой мощности за счет потерь на трение и нагрев. Однако, если шильдик на корпусе двигателя отсутствует, можно очень приблизительно оценить характеристики привода по его габаритам. При одинаковой мощности двигатель с бо́льшим диаметром вала будет иметь более высокую мощность на валу и меньшую частоту оборотов.
Также мощность можно определить по нагрузке и по настройкам защитных устройств, через которые питается двигатель (мотор-автомат, тепловое реле).
Еще один способ – включаем двигатель на номинальную мощность, обеспечив нужную нагрузку на валу. После этого измеряем токоизмерительными клещами ток, который должен быть одинаков по всем обмоткам. Для приблизительной оценки мощности асинхронного двигателя, подключенного по схеме «звезда», нужно разделить номинальный измеренный ток на 2.
5. Как увеличить или уменьшить обороты электродвигателя?
Управление скоростью вращения двигателя необходимо в трех режимах работы – при разгоне, торможении, и в рабочем режиме.
Наиболее универсальный способ управления оборотами — использование частотного преобразователя. Настройками ПЧ можно добиться любой частоты вращения в пределах технической возможности. При этом можно управлять и другими параметрами электродвигателя, а также следить за его состоянием во время работы. Частоту можно менять и плавно, и ступенчато.
Управление оборотами двигателя в режиме разгона и торможения возможно при использовании УПП. Это устройство позволяет значительно снизить пусковой ток за счет плавного разгона с медленным увеличением оборотов.
6. Как рассчитать ток и мощность электродвигателя?
Бывает так, что известен ток асинхронного двигателя (по измерениям в номинальном режиме или по шильдику), но неизвестна его мощность. Как в таком случае рассчитать мощность? Обычно используют следующую формулу:
Р = I (1,73·U·cosφ·η)
где:
Р – номинальная полезная мощность на валу двигателя в Вт (указывается на шильдике),
I – ток двигателя, А,
U – напряжение питания обмоток (380 В при подключении в «звезду», 220 В при подключении в «треугольник»),
cosφ, η – коэффициенты мощности и полезного действия для учета потерь (обычно 0,7…0,8).
Для расчета тока по известной мощности пользуются обратной формулой:
I = P/(1,73·U·cosφ·η)
Для двигателей мощностью 1,5 кВт и более, обмотки которых подключены в «звезду» (это подключение используется чаще всего), существует простое эмпирическое правило – чтобы приблизительно оценить ток двигателя, нужно умножить его мощность на 2.
7. Как увеличить мощность электродвигателя?
Номинальная мощность на валу, которая указывается на шильдике двигателя, обычно ограничивается допустимым током, а значит – нагревом корпуса привода. Поэтому при увеличении мощности необходимо предпринять дополнительные меры по охлаждению электродвигателя, установив отдельный вентилятор.
При использовании преобразователя частоты для повышения мощности можно изменить несущую частоту ШИМ, однако следует избегать перегрева ПЧ. Мощность также можно увеличить с помощью редуктора или ременной передачи, пожертвовав количеством оборотов, если это допустимо.
Если приведенные советы неприменимы – придётся менять двигатель на более мощный.
8. Каковы потери мощности при подключении трехфазного двигателя к однофазной сети (380 на 220)?
При таком подключении используются пусковой и рабочий фазосдвигающие конденсаторы. Номинальную мощность на валу в данном случае получить не удастся, и потери мощности составят 20-30% от номинала. Это происходит из-за невозможности обеспечить отсутствие перекоса по фазам при изменении нагрузки.
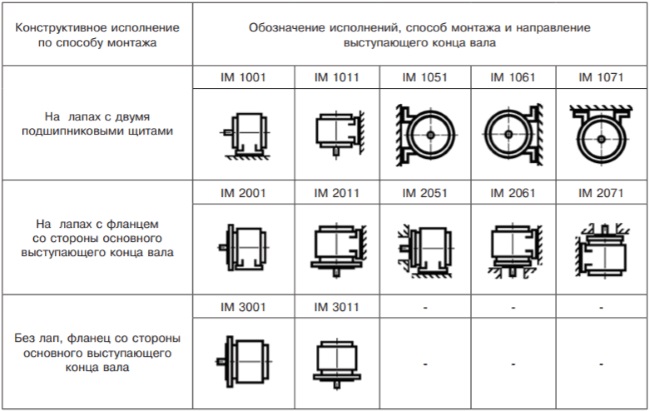
9. Какие исполнения двигателей бывают?
В зависимости от исполнения электродвигатели классифицируются по способу монтажа, классу защиты, климатическому исполнению. Существует два основных способа монтажа асинхронных электродвигателей – на лапах и через фланец. Оба варианта исполнения в различных комбинациях показаны в таблице ниже.
Виды климатического исполнения предполагают использование двигателя в определенных климатических зонах: умеренный климат (У), холодный климат (ХЛ), умеренно-холодный климат (УХЛ), тропический климат (Т), общеклиматическое исполнение (О), общеклиматическое морское исполнение (ОМ), всеклиматическое исполнение (В). Также различают категории размещения (на открытом воздухе, под навесом или в помещении и т.д.).
Класс защиты обозначает характер защиты двигателя от попадания пыли и влаги. Наиболее часто встречаются приводы с классами IP55 и IP55.
10. Зачем электродвигателю тормоз?
В некоторых устройствах (лифтах, электроталях, лебедках) при остановке двигателя необходимо зафиксировать его вал в неподвижном состоянии. Для этого применяют электромагнитный механический тормоз, который входит в конструкцию двигателя и располагается в его задней части. Управление тормозом осуществляется с помощью частотного преобразователя или схемы на контакторах.
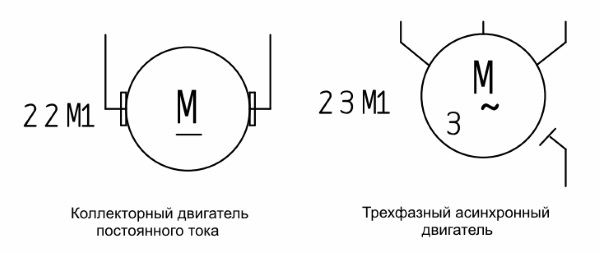
11. Как двигатель обозначается на электрических схемах?
Электродвигатель обозначается на схемах с помощью буквы «М», вписанной в круг. Также на схемах могут быть указаны порядковый номер двигателя, количество фаз (1 или 3), род тока (переменный или постоянный), способ включения обмоток ( «звезда» или «треугольник»), мощность. Примеры обозначений показаны ниже.
12. Почему греется электродвигатель?
Двигатель может нагреваться по одной из следующих причин:
- износ подшипников и повышенное механическое трение
- увеличение нагрузки на валу
- перекос напряжения питания
- пропадание фазы
- замыкание в обмотке
- проблема с обдувом (охлаждением)
Нагрев двигателя резко снижает его ресурс и КПД, а также может приводить к поломке привода.
13. Типичные неисправности электродвигателей
Выделяют два вида неисправностей электродвигателей: электрические и механические.
К электрическим относятся неисправности, связанные с обмоткой:
- межвитковое замыкание
- замыкание обмотки на корпус
- обрыв обмотки
Для устранения этих неисправностей требуется перемотка двигателя.
- износ и трение в подшипниках
- проворачивание ротора на валу
- повреждение корпуса двигателя
- проворачивание или повреждение крыльчатки обдува
Замена подшипников должна производиться регулярно с учетом их износа и срока службы. Крыльчатка также меняется в случае повреждения. Остальные неисправности устранению практически не подлежат, и единственный выход — замена двигателя.
Если у вас есть вопросы, ответы на которые вы не нашли в данной статье, напишите нам. Будем рады помочь!