21.Регулирование скорости вращения двигателя постоянного тока
21. Регулирование скорости вращения двигателя постоянного тока.
Двигатели постоянного тока дают возможность плавно и экономично регулировать скорость вращения в широких пределах. В результате этого весьма ценного свойства двигатели постоянного тока получили широкое распространение и часто являются незаменимыми.
Число оборотов якоря двигателя при любой схеме возбуждения определяется следующим выражением:

где rс — сопротивление последовательной обмотки возбуждения (для двигателя параллельного возбуждения rс=0). Это выражение показывает, что изменение скорости вращения двигателя можно осуществить изменением напряжения сети, сопротивления цепи якоря и магнитного потока.
Регулирование скорости вращения изменением напряжения сети осуществляется в случае, когда источником электрической энергий двигателя является какой-либо генератор.
Для регулирования скорости вращения двигателя изменением сопротивления цепи якоря используется регулировочный реостат, включенный последовательно с якорем. В отличие от пускового регулировочный реостат должен быть рассчитан на длительное прохождение тока. В сопротивлении регулировочного реостата происходит большая потеря энергии, вследствие чего резко уменьшается к. п. д. двигателя.
Регулирование скорости вращения якоря двигателя изменением магнитного потока производится изменением тока в обмотке возбуждения. В двигателях параллельного и смешанного возбуждения включается регулировочный реостат. В двигателях последовательного возбуждения изменение тока в обмотке возбуждения достигается шунтированием этой обмотки каким-либо регулируемым сопротивлением. Этот способ регулирования скорости не создает дополнительных потерь и экономичен.
Регулирование скорости вращения двигателей постоянного тока с параллельным возбуждением
Из уравнения механической характеристики (11) и рис. 10 следует, что скорость вращения двигателя постоянного тока можно регулировать, изменяя один из параметров: сопротивление цепи якоря rя
Регулирование скорости двигателя постоянного тока с параллельным возбуждением изменением сопротивления цепи якоря применяется редко, так как оно неэкономично и обладает теми же недостатками, что и реостатное регулирование скорости асинхронных двигателей с фазовым ротором. Как и у асинхронных двигателей регулирование по этому способу производится с постоянным моментом. Обычный диапазон регулирования: nmax/nmin=2:1.
Широкое распространение получило регулирование скорости изменением магнитного потока двигателя, осуществляемое с помощью реостата
С учетом выражений (4), (9) и (10)

Предельно допустимый ток якоря Iя определяется условиями нагрева и поэтому при регулировании скорости двигателя не изменяется. Тогда согласно формуле (16) мощность двигателя при изменении магнитного потока остается постоянной. Следовательно, регулирование скорости двигателя изменением магнитного потока является регулированием с постоянной мощностью. Диапазон регулирования скорости двигателей постоянного тока с параллельным возбуждением изменением магнитного потока лежит в пределах nmax/nmin = (2:1)…(4:1).
Регулирование скорости изменением магнитного потока используется в комплектных регулируемых приводах серии ПКВ. В этих приводах двигатель подключается к сети переменного тока через трансформатор и трехфазный выпрямительный мост на кремниевых вентилях. Номинальная мощность приводов серии ПКВ 6 –25
Регулирование скорости вращения двигателя постоянного тока изменением напряжения питания осуществляется при постоянном магнитном потоке двигателя. В этом случае к обмотке возбуждения двигателя подводится постоянное напряжение, а якорь двигателя подключают к источнику регулируемого напряжения, т. е. по существу используется двигатель с независимым возбуждением. Регулирование скорости изменением напряжения достаточно экономично, так как оно не связано с дополнительными потерями в двигателе. Однако для такого регулирования требуются специальные источники регулируемого напряжения, вследствие чего общий к. п. д. системы уменьшается.
Из выражения (9) следует, что регулирование изменением напряжения является регулированием с постоянным моментом, так как магнитный поток двигателя Ф и предельно допустимый ток якоря Iя остаются неизменными. Согласно уравнению (11) линейные механические характеристики двигателя, соответствующие различным значениям напряжения питания U, расположены одна под другой и параллельны естественной. Диапазон регулирования скорости вращения двигателя изменением напряжения обычно не превышает 5:1. Регулирование скорости двигателей изменением напряжения широко используется в системах автоматического управления и регулирования.
Регулируемое напряжение для питания двигателя постоянного тока можно получить, например, с помощью электромашинного преобразователя. Такой преобразователь вместе с двигателем привода машины называют системой генератор – двигатель (сокращенно Г – Д).
С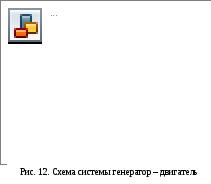 истемаГ – Д (рис. 12) состоит из первичного асинхронного
(или любого другого) двигателя М1,
истемаГ – Д (рис. 12) состоит из первичного асинхронного
(или любого другого) двигателя М1,
Изменяя сопротивление реостата R1 в цепи возбуждения генератора Г, можно изменить напряжение на его зажимах и, следовательно, скорость вращения двигателя
М еханические
характеристики двигателя в системеГ – Д приведены на рис. 13. Пуск двигателя
осуществляется при полном магнитном
потоке подключением обмотки возбуждения
генератора ОВГ переключателем В1
еханические
характеристики двигателя в системеГ – Д приведены на рис. 13. Пуск двигателя
осуществляется при полном магнитном
потоке подключением обмотки возбуждения
генератора ОВГ переключателем В1
Ввиду большого индуктивного сопротивления обмотки ОВГ ток в ней нарастает медленно, а напряжение, подводимое к двигателю, повышается постепенно. Пуск двигателя можно форсировать, закорачивая на время пуска сопротивление R3 выключателем В2.
Сопротивление R4 является разрядным. Замедляя уменьшение магнитного потока и снижая тем самым э. д. с. самоиндукции, оно предохраняет изоляцию обмотки возбуждения от пробоя в случае обрыва или отключения цепи возбуждения.
Реверс электродвигателя М2 осуществляется изменением направления тока в обмотке возбуждения генератора ОВГ с помощью переключателя В1 (или другого аналогичного устройства). Основными недостатками системы
Иногда в качестве источника регулируемого напряжения для питания двигателей постоянного тока используются электромашинные усилители (ЭМУ) с поперечным магнитным потоком, например, в приводе электродов дуговой печи (рис. 14).
Экспериментально установлено, что наиболее экономичный режим плавки происходит при определенной мощности дуги. Система управления автоматически стабилизирует эту мощность путем изменения дугового промежутка. Напряжение дуги
П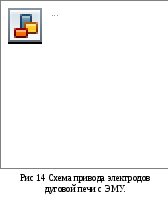 ри
отклонении в режиме плавки изменяется
соотношение напряжения и тока дуги,
вследствие чего на обмоткеОУ1 появляется
управляющее напряжение Uy.
ЭМУ возбуждается,
на его выходных клеммах появляется
напряжение, и двигатель М начинает
перемещать электрод Э, устраняя
появившееся отклонение от заданного
режима, устанавливаемого потенциометром R. Для
компенсации неравномерности нагрузки
при опускании и подъеме электрода на
вторую обмотку управления ОУ2 подается
напряжение, компенсирующее вес электрода.
ри
отклонении в режиме плавки изменяется
соотношение напряжения и тока дуги,
вследствие чего на обмоткеОУ1 появляется
управляющее напряжение Uy.
ЭМУ возбуждается,
на его выходных клеммах появляется
напряжение, и двигатель М начинает
перемещать электрод Э, устраняя
появившееся отклонение от заданного
режима, устанавливаемого потенциометром R. Для
компенсации неравномерности нагрузки
при опускании и подъеме электрода на
вторую обмотку управления ОУ2 подается
напряжение, компенсирующее вес электрода.
В последние годы все шире применяются приводы с полупроводниковыми управляемыми вентилями – тиристорами (рис.15). Тиристор имеет четырехслойную структуру типа р-п-р-п. Вывод от внутренней базовой области (р-области) служит управляющим электродом. При отсутствии сигнала на управляющем электроде тиристор остается в запертом состоянии при напряжении питания прямой полярности, меньшем определенного предела (напряжения включения).
При поступлении сигнала на управляющий электрод тиристор переходит в открытое состояние при напряжении питания, меньшем напряжения включения. После открывания тиристора управляющий электрод теряет свои управляющие свойства, а запирание тиристора возможно уменьшением силового тока до определенного предела, называемого током выключения. Падение напряжения на тиристоре в открытом состоянии не превышает 1 В.
Тиристоры отличаются высокой экономичностью, надежностью в работе, безынерционностью, малыми размерами и массой. При работе они не создают радиопомех и имеют практически неограниченный срок службы. Отечественной промышленностью серийно выпускаются кремниевые управляемые вентили серий ВКУ и ВКУВ, рассчитанные на номинальный ток до 100 а. Начато производство тиристоров на ток до 250 а.
П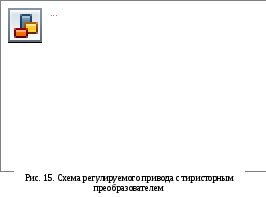 ри
использовании тиристоров в выпрямителях
становится возможным получить регулируемое
напряжение для двигателей постоянного
тока. Так, в схеме нереверсивного
электропривода, разработанной для
двигателя мощностью 15кВт (рис.
15), регулируемое напряжение к якорю
двигателя М подводится
от трехфазного несимметричного мостового
выпрямителя на неуправляемых кремниевых
вентилях Д1…ДЗ и
тиристорах ДУ1…ДУЗ.
ри
использовании тиристоров в выпрямителях
становится возможным получить регулируемое
напряжение для двигателей постоянного
тока. Так, в схеме нереверсивного
электропривода, разработанной для
двигателя мощностью 15кВт (рис.
15), регулируемое напряжение к якорю
двигателя М подводится
от трехфазного несимметричного мостового
выпрямителя на неуправляемых кремниевых
вентилях Д1…ДЗ и
тиристорах ДУ1…ДУЗ.
Обмотка возбуждения ОВМ подключена к неуправляемому мостовому выпрямителю на вентилях Д…Д6.
Управление
тиристорами осуществляется при помощи
зарядных цепей R – C. Например,
при положительной полуволне напряжения
конденсатор С2 заряжается
через вентиль Д1 или ДЗ, сопротивление R7
и диод Д8. С
конденсаторов С1…СЗ напряжение
подается на управляющие электроды
тиристоров через токоограничивающие
сопротивления R4…R6. При
зарядке конденсатора открывается
соответствующий ему тиристор. Время
зарядки конденсатора и, следовательно,
момент открывания (угол открывания)
тиристора определяются постоянной
времени  =RC зарядного
контура и могут регулироваться
сопротивлением R7. В
зависимости от угла открывания тиристора
изменяется длительность протекания
тока через него в течение положительной
полуволны напряжения и, следовательно,
среднее значение выпрямленного
напряжения.
=RC зарядного
контура и могут регулироваться
сопротивлением R7. В
зависимости от угла открывания тиристора
изменяется длительность протекания
тока через него в течение положительной
полуволны напряжения и, следовательно,
среднее значение выпрямленного
напряжения.
Сопротивления R…R3 служат для разрядки конденсаторов С1…СЗ во время отрицательной полуволны напряжения.
Диапазон регулирования скорости двигателя в рассмотренной схеме равен 1…10. Для управления тиристорами в более сложных схемах используются насыщенные дроссели или устройства на транзисторах и маломощных тиристорах. Примером такого привода может служить привод типа ПКВУ с обратной связью по скорости и промежуточным полупроводниковым усилителем. Мощность привода 8 кВт. В диапазоне скоростей 15… 1500 об/мин колебание скорости вращения двигателя не превышает 5% при М = (0,25…1)МН.
Основным недостатком приводов, в которых регулирование напряжения осуществляется изменением угла открывания тиристоров, является значительное снижение cosφ при уменьшении скорости вращения двигателя. С целью повышения cosφ используют схемы, в которых регулируемое напряжение тиристорного выпрямителя алгебраически суммируется (складывается или вычитается) с постоянным нерегулируемым напряжением.
5. Способы регулирования частоты вращения двигателей постоянного тока
Принцип
работы ДПТ. Вмашине должно быть две
основные части: первая часть – создает
магнитный поток, вторая часть – в которой
индуктируется ЭДС. Первая часть в машине
постоянного тока неподвижна. К станине
(1) крепятся штампованные полюса (2) на
которых располагается обмотка возбуждения
(3). Вторая часть – якорь. Якорь вращается.
Представляет собой цилиндр набранный
из листов электротехнической стали
(4).В наружной части якоря расположены
пазы, где укладываются секции обмотки
(5). Каждая секция соединяется с пластинами
коллектора (6).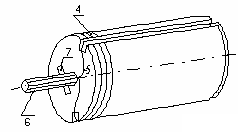
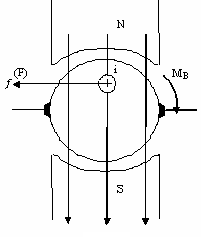
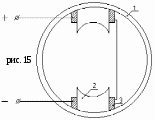
Рис. 223
 Электромагнитный момент зависит
от потока и тока якоря. В генераторном
режиме электромагнитный момент является
тормозным. Уравнение равновесного
состояния моментов запишется
Электромагнитный момент зависит
от потока и тока якоря. В генераторном
режиме электромагнитный момент является
тормозным. Уравнение равновесного
состояния моментов запишется  ,
где
,
где —
механический момент на валу генератора,
—
механический момент на валу генератора, —
момент хх,
—
момент хх, —
электромагнитный момент. Основное
уравнение движения электропривода
—
электромагнитный момент. Основное
уравнение движения электропривода .
Установившийся процесс, когда
.
Установившийся процесс, когда ,
, ,
, ,
Если
,
Если ,
, ,
, .
Если
.
Если ,
, ,
, .
.
 Принцип
регулирования частоты вращения. С точки зрения регулирования частоты
вращения, двигатель постоянного тока
является универсальным. Можно регулировать
скорость за счет изменения сопротивления
в цепи якоря, потока и подводимого
напряжения. Это видно из формулы:
Принцип
регулирования частоты вращения. С точки зрения регулирования частоты
вращения, двигатель постоянного тока
является универсальным. Можно регулировать
скорость за счет изменения сопротивления
в цепи якоря, потока и подводимого
напряжения. Это видно из формулы:  .
.
Сопротивлением в цепи якоря. Уравнения токов до и после введения сопротивления
 ,
,  ,
откуда
,
откуда ,
т. е. ток
,
т. е. ток и момент уменьшается (
и момент уменьшается ( )
. При этом
)
. При этом и
скорость
и
скорость уменьшается. С уменьшением скорости
уменьшается. С уменьшением скорости ток якоря возрастает, и он достигнет
исходного тока якоря, но при меньшей
скорости
ток якоря возрастает, и он достигнет
исходного тока якоря, но при меньшей
скорости .
Регулирование частоты вращения
сопротивлением в цепи якоря осуществляется
в сторону уменьшения скорости.
.
Регулирование частоты вращения
сопротивлением в цепи якоря осуществляется
в сторону уменьшения скорости.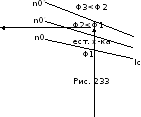
Потоком. Ток якоря
до и после изменения потока  ,
, ,
их отношение
,
их отношение .
Уравнение5.1.моментов
.
Уравнение5.1.моментов  .
Уменьшим поток , Ток якоря возрос, тогда
.
Уменьшим поток , Ток якоря возрос, тогда ,
то
,
то и
и (возрастает).
(возрастает).
Напряжением. Регулирование частоты вращения производится следующими способами: А) Система генератор-двигатель (Г-Д). Б) Тиристорный преобразователь-двигатель (ТП-Д). В) Широтно-импульсное регулирование.
 А)
Система Г-Д, рис.234.
А)
Система Г-Д, рис.234.  .
Увеличивая ток возбуждения генератораiвг,
возрастает поток Фг и Ег,
а следовательно увеличивается напряжение
на якоре двигателя и скорость возрастает.
.
Увеличивая ток возбуждения генератораiвг,
возрастает поток Фг и Ег,
а следовательно увеличивается напряжение
на якоре двигателя и скорость возрастает.
Б)
Тиристорный преобразователь-двигатель.
Увеличивая угол управления  — площадь полупериода уменьшается,
уменьшается среднее значение напряжения
-Uср,
а следовательно уменьшается скорость
вращения.
— площадь полупериода уменьшается,
уменьшается среднее значение напряжения
-Uср,
а следовательно уменьшается скорость
вращения.
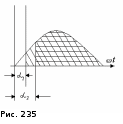
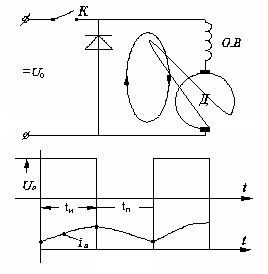
В) Широтно-импульсное регулирование.
Рис. 236
Изменяя время импульса tи изменяется скважность ,
гдеtи — время импульса; tп — время паузы . Среднее значение Uср=U0.
,
гдеtи — время импульса; tп — время паузы . Среднее значение Uср=U0.  .
.
6.Способы регулирования активной и реактивной мощности синхронной машины.
Способы регулирования активной и реактивной мощности синхронного генератора. Как только что видели, что если изменять возбуждение генератора, то тем самым будем изменять реактивную мощность, отдавать, либо потреблять. Регулировать активную мощность можно только изменяя механическую мощность со стороны паровой турбины, либо гидротурбины. При увеличении отдаваемой активной мощности, необходимо увеличить и механическую мощность со стороны турбины.
Пуск СД. для пуска синхронного двигателя необходимо разогнать его ротор с помощью внешнего момента до частоты вращения, близкой к синхронной. В виду отсутствия пускового момента в синхронном двигателе для пуска его используют следующие способы:1 Пуск с помощью вспомогательного двигателя ; 2Асинхронный пуск двигателя.
1.Пуск в ход синхронного двигателя с помощью вспомогательного двигателя может быть произведен только без механической нагрузки на его валу, т.е. практически вхолостую. В этом случае на период пуска двигатель временно превращается в синхронный генератор, ротор которого приводится во вращение небольшим вспомогательным двигателем до n=0,95n1. Статор этого генератора включается параллельно в сеть с соблюдением условий этого соединения. После включения статора в сеть, с небольшой выдержкой, включают обмотку возбуждения, и двигатель втягивается в синхронизм, а вспомогательный приводной двигатель механически отключается. Этот способ пуска сложен и имеет к тому же вспомогательный двигатель.
2.
синхронный двигатель на время пуска
превращается в асинхронный. Для
возможности образования асинхронного
пускового момента в пазах полюсных
наконечников явнополюсного двигателя
помещается пусковая короткозамкнутая
обмотка. Процесс пуска синхронного
двигателя осуществляется в два этапа.
При включении обмотки статора (1) в сеть
в двигателе образуется вращающее поле,
которое наведет в короткозамкнутой
обмотке ротора (2) ЭДС. Под действием,
которой будет протекать в стержнях ток.
В результате взаимодействия вращающего
магнитного поля с током в короткозамкнутой
обмотке создается вращающий момент,
как у асинхронного двигателя. За счет
этого момента ротор разгоняется до
скольжения близкого к нулю (S=0,05),
рис. 313. На этом заканчивается первый
этап. Чтобы ротор двигателя втянулся в
синхронизм, необходимо создать в нем
магнитное поле включением в обмотку
возбуждения (3) постоянного тока
(переключив ключ К в положение 1). Так
как ротор разогнан до скорости близкой
к синхронной, то относительная скорость
поля статора и ротора небольшая. Полюса
плавно будут находить друг на друга. И
после ряда проскальзываний, противоположные
полюса притянутся, и ротор втянется в
синхронизм. После чего ротор будет
вращаться с синхронной скоростью, и
частота вращения его будет постоянной,
рис. 313. На этом заканчивается второй
этап пуска. Работа
СД при недовозбужденном и перевозбужденном
режимах( ib=var). Режим работы соответствует постоянству
момента.  при
при . При недовозбужденном синхронном
двигателе составляющей напряжения -Е0 соответствует ток I,
который отстает от напряжения Uc
на угол φ.
Реактивная составляющая тока IL будет отставать на 900 от вектора напряжения Uc,
т.е. этот ток чисто индуктивный. Значит,
при недовозбуждении двигатель будет
потреблять из сети индуктивный ток, а
следовательно будет потреблять из сети
и реактивную мощность.
. При недовозбужденном синхронном
двигателе составляющей напряжения -Е0 соответствует ток I,
который отстает от напряжения Uc
на угол φ.
Реактивная составляющая тока IL будет отставать на 900 от вектора напряжения Uc,
т.е. этот ток чисто индуктивный. Значит,
при недовозбуждении двигатель будет
потреблять из сети индуктивный ток, а
следовательно будет потреблять из сети
и реактивную мощность.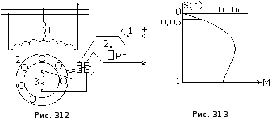
При
увеличении возбуждения величина –Е01 увеличится, а ток I
уменьшится до Ia=I1 и будет минимальным. При этом режиме СД
будет работать с cosφ=1
и реактивная мощность, не будет ни
потребляться, ни отдаваться в сеть. При
дальнейшем увеличении тока возбуждения
составляющая напряжения будет равна
–Е011,
а ток I11 , будет опережать вектор напряжения
сети на угол φ1.
Этот режим соответствует перевозбужденному
режиму. Реактивная составляющая тока
будет емкостной (опережает вектор Uc
на 900).
Этот режим будет соответствовать отдаче
реактивной мощности в сеть. Этот режим
аналогичен включению статических
емкостей в сеть.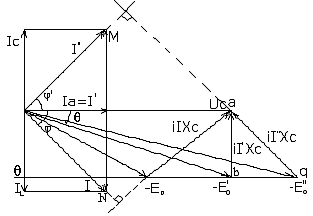
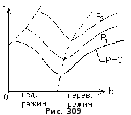
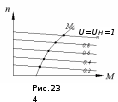
Итак видим, что если изменять ток возбуждения iB, то величина тока статора I будет изменяться по величине и по фазе, т.е. можно регулировать cosφ. Это ценное свойство и определяет использование синхронных двигателей. Зависимости тока статора I от тока возбуждения iв, I=f(iв) называются U-образные характеристики, рис. 309. Р2 > Р1. Характеристики снимаются при P=const. Режим работы соответствующий току возбуждения от 0 до пунктирной линии недовозбужденный, а за пунктирной линией – перевозбужденный с отдачей реактивной энергии в сеть.
Регулирование скорости вращения двигателей постоянного тока с параллельным возбуждением
Из уравнения механической характеристики (11) и рис. 10 следует, что скорость вращения двигателя постоянного тока можно регулировать, изменяя один из параметров: сопротивление цепи якоря rя, магнитный поток двигателя Ф или напряжение питания U.
Регулирование скорости двигателя постоянного тока с параллельным возбуждением изменением сопротивления цепи якоря применяется редко, так как оно неэкономично и обладает теми же недостатками, что и реостатное регулирование скорости асинхронных двигателей с фазовым ротором. Как и у асинхронных двигателей регулирование по этому способу производится с постоянным моментом. Обычный диапазон регулирования: nmax/nmin=2:1.
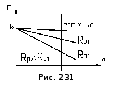
Широкое распространение получило регулирование скорости изменением магнитного потока двигателя, осуществляемое с помощью реостата R2 (рис. 10), включенного в цепь обмотки возбуждения. Согласно формулам (12) и (14) каждому значению магнитного потока Ф соответствуют определенные значения п0 и b. Поэтому при изменении магнитного потока двигателя его механические характеристики изображаются прямыми 5…8, не параллельными естественной механической характеристике 7, (рис. 10). Регулирование скорости изменения магнитного потока двигателя осуществляется просто и достаточно экономично, так как ток возбуждения мал по сравнению с током якоря.
С учетом выражений (4), (9) и (10)
 (16)
(16)
Предельно допустимый ток якоря Iя определяется условиями нагрева и поэтому при регулировании скорости двигателя не изменяется. Тогда согласно формуле (16) мощность двигателя при изменении магнитного потока остается постоянной. Следовательно, регулирование скорости двигателя изменением магнитного потока является регулированием с постоянной мощностью. Диапазон регулирования скорости двигателей постоянного тока с параллельным возбуждением изменением магнитного потока лежит в пределах nmax/nmin = (2:1)…(4:1).
Регулирование скорости изменением магнитного потока используется в комплектных регулируемых приводах серии ПКВ. В этих приводах двигатель подключается к сети переменного тока через трансформатор и трехфазный выпрямительный мост на кремниевых вентилях. Номинальная мощность приводов серии ПКВ 6 –25 кВт, обеспечиваемый диапазон бесступенчатого регулирования 2:1.
Регулирование скорости вращения двигателя постоянного тока изменением напряжения питания осуществляется при постоянном магнитном потоке двигателя. В этом случае к обмотке возбуждения двигателя подводится постоянное напряжение, а якорь двигателя подключают к источнику регулируемого напряжения, т. е. по существу используется двигатель с независимым возбуждением. Регулирование скорости изменением напряжения достаточно экономично, так как оно не связано с дополнительными потерями в двигателе. Однако для такого регулирования требуются специальные источники регулируемого напряжения, вследствие чего общий к. п. д. системы уменьшается.
Из выражения (9) следует, что регулирование изменением напряжения является регулированием с постоянным моментом, так как магнитный поток двигателя Ф и предельно допустимый ток якоря Iя остаются неизменными. Согласно уравнению (11) линейные механические характеристики двигателя, соответствующие различным значениям напряжения питания U, расположены одна под другой и параллельны естественной. Диапазон регулирования скорости вращения двигателя изменением напряжения обычно не превышает 5:1. Регулирование скорости двигателей изменением напряжения широко используется в системах автоматического управления и регулирования.
Регулируемое напряжение для питания двигателя постоянного тока можно получить, например, с помощью электромашинного преобразователя. Такой преобразователь вместе с двигателем привода машины называют системой генератор – двигатель (сокращенно Г – Д).
С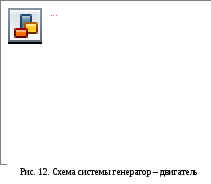 истемаГ – Д (рис. 12) состоит из первичного асинхронного
(или любого другого) двигателя М1, генератора
постоянного тока Г, возбудителя Г
В и
исполнительного двигателя постоянного
тока М2, используемого
для непосредственного привода машины.
Двигатель М1 приводит
во вращение генератор Г
с независимым
возбуждением и возбудитель Г
В –
небольшой генератор с самовозбуждением
(параллельным или смешанным). От
возбудителя ГВ питаются
обмотки возбуждения генератора ОВГ и
двигателя ОВМ. Цепь
якоря двигателя М2 подключена
к генератору Г.
истемаГ – Д (рис. 12) состоит из первичного асинхронного
(или любого другого) двигателя М1, генератора
постоянного тока Г, возбудителя Г
В и
исполнительного двигателя постоянного
тока М2, используемого
для непосредственного привода машины.
Двигатель М1 приводит
во вращение генератор Г
с независимым
возбуждением и возбудитель Г
В –
небольшой генератор с самовозбуждением
(параллельным или смешанным). От
возбудителя ГВ питаются
обмотки возбуждения генератора ОВГ и
двигателя ОВМ. Цепь
якоря двигателя М2 подключена
к генератору Г.
Изменяя сопротивление реостата R1 в цепи возбуждения генератора Г, можно изменить напряжение на его зажимах и, следовательно, скорость вращения двигателя М2. С помощью реостата R2 можно изменять магнитный поток двигателя М2. Таким образом, система Г – Д позволяет регулировать скорость вращения двигателя изменением как напряжения, так и магнитного потока. Общий диапазон регулирования равен произведению диапазонов регулирования обоими способами и обычно составляет (10: 1)…(15: 1), но может достигать (20: 1)…(30: 1).
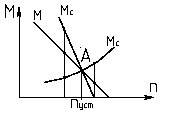
М еханические
характеристики двигателя в системеГ – Д приведены на рис. 13. Пуск двигателя
осуществляется при полном магнитном
потоке подключением обмотки возбуждения
генератора ОВГ переключателем В1 (рис.
12)
еханические
характеристики двигателя в системеГ – Д приведены на рис. 13. Пуск двигателя
осуществляется при полном магнитном
потоке подключением обмотки возбуждения
генератора ОВГ переключателем В1 (рис.
12)
Ввиду большого индуктивного сопротивления обмотки ОВГ ток в ней нарастает медленно, а напряжение, подводимое к двигателю, повышается постепенно. Пуск двигателя можно форсировать, закорачивая на время пуска сопротивление R3 выключателем В2.
Сопротивление R4 является разрядным. Замедляя уменьшение магнитного потока и снижая тем самым э. д. с. самоиндукции, оно предохраняет изоляцию обмотки возбуждения от пробоя в случае обрыва или отключения цепи возбуждения.
Реверс электродвигателя М2 осуществляется изменением направления тока в обмотке возбуждения генератора ОВГ с помощью переключателя В1 (или другого аналогичного устройства). Основными недостатками системы ГД являются относительно низкий к. п. д. (0,6…0,7), высокая стоимость, превышающая стоимость асинхронного двигателя в 8…10 раз, и значительные размеры. Поэтому в современных литейных машинах система Г – Д применяется редко (например, в центробежных машинах).
Иногда в качестве источника регулируемого напряжения для питания двигателей постоянного тока используются электромашинные усилители (ЭМУ) с поперечным магнитным потоком, например, в приводе электродов дуговой печи (рис. 14).
Экспериментально установлено, что наиболее экономичный режим плавки происходит при определенной мощности дуги. Система управления автоматически стабилизирует эту мощность путем изменения дугового промежутка. Напряжение дуги Uд и ток Iд подаются через выпрямители Bn1 и Вп2 на сравнивающее устройство. Если мощность дуги соответствует заданному значению, то напряжение Uy на потенциометре R и на обмотке управления ОУ1 равно нулю. ЭМУ не возбуждается, и якорь двигателя М находится в покое (не вращается).
П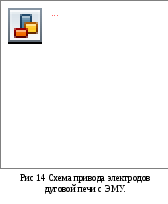 ри
отклонении в режиме плавки изменяется
соотношение напряжения и тока дуги,
вследствие чего на обмоткеОУ1 появляется
управляющее напряжение Uy.
ЭМУ возбуждается,
на его выходных клеммах появляется
напряжение, и двигатель М начинает
перемещать электрод Э, устраняя
появившееся отклонение от заданного
режима, устанавливаемого потенциометром R. Для
компенсации неравномерности нагрузки
при опускании и подъеме электрода на
вторую обмотку управления ОУ2 подается
напряжение, компенсирующее вес электрода.
ри
отклонении в режиме плавки изменяется
соотношение напряжения и тока дуги,
вследствие чего на обмоткеОУ1 появляется
управляющее напряжение Uy.
ЭМУ возбуждается,
на его выходных клеммах появляется
напряжение, и двигатель М начинает
перемещать электрод Э, устраняя
появившееся отклонение от заданного
режима, устанавливаемого потенциометром R. Для
компенсации неравномерности нагрузки
при опускании и подъеме электрода на
вторую обмотку управления ОУ2 подается
напряжение, компенсирующее вес электрода.
В последние годы все шире применяются приводы с полупроводниковыми управляемыми вентилями – тиристорами (рис.15). Тиристор имеет четырехслойную структуру типа р-п-р-п. Вывод от внутренней базовой области (р-области) служит управляющим электродом. При отсутствии сигнала на управляющем электроде тиристор остается в запертом состоянии при напряжении питания прямой полярности, меньшем определенного предела (напряжения включения).
При поступлении сигнала на управляющий электрод тиристор переходит в открытое состояние при напряжении питания, меньшем напряжения включения. После открывания тиристора управляющий электрод теряет свои управляющие свойства, а запирание тиристора возможно уменьшением силового тока до определенного предела, называемого током выключения. Падение напряжения на тиристоре в открытом состоянии не превышает 1 В.
Тиристоры отличаются высокой экономичностью, надежностью в работе, безынерционностью, малыми размерами и массой. При работе они не создают радиопомех и имеют практически неограниченный срок службы. Отечественной промышленностью серийно выпускаются кремниевые управляемые вентили серий ВКУ и ВКУВ, рассчитанные на номинальный ток до 100 а. Начато производство тиристоров на ток до 250 а.
П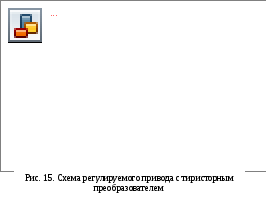 ри
использовании тиристоров в выпрямителях
становится возможным получить регулируемое
напряжение для двигателей постоянного
тока. Так, в схеме нереверсивного
электропривода, разработанной для
двигателя мощностью 15кВт (рис.
15), регулируемое напряжение к якорю
двигателя М подводится
от трехфазного несимметричного мостового
выпрямителя на неуправляемых кремниевых
вентилях Д1…ДЗ и
тиристорах ДУ1…ДУЗ.
ри
использовании тиристоров в выпрямителях
становится возможным получить регулируемое
напряжение для двигателей постоянного
тока. Так, в схеме нереверсивного
электропривода, разработанной для
двигателя мощностью 15кВт (рис.
15), регулируемое напряжение к якорю
двигателя М подводится
от трехфазного несимметричного мостового
выпрямителя на неуправляемых кремниевых
вентилях Д1…ДЗ и
тиристорах ДУ1…ДУЗ.
Обмотка возбуждения ОВМ подключена к неуправляемому мостовому выпрямителю на вентилях Д…Д6.
Управление
тиристорами осуществляется при помощи
зарядных цепей R – C. Например,
при положительной полуволне напряжения
конденсатор С2 заряжается
через вентиль Д1 или ДЗ, сопротивление R7
и диод Д8. С
конденсаторов С1…СЗ напряжение
подается на управляющие электроды
тиристоров через токоограничивающие
сопротивления R4…R6. При
зарядке конденсатора открывается
соответствующий ему тиристор. Время
зарядки конденсатора и, следовательно,
момент открывания (угол открывания)
тиристора определяются постоянной
времени  =RC зарядного
контура и могут регулироваться
сопротивлением R7. В
зависимости от угла открывания тиристора
изменяется длительность протекания
тока через него в течение положительной
полуволны напряжения и, следовательно,
среднее значение выпрямленного
напряжения.
=RC зарядного
контура и могут регулироваться
сопротивлением R7. В
зависимости от угла открывания тиристора
изменяется длительность протекания
тока через него в течение положительной
полуволны напряжения и, следовательно,
среднее значение выпрямленного
напряжения.
Сопротивления R…R3 служат для разрядки конденсаторов С1…СЗ во время отрицательной полуволны напряжения.
Диапазон регулирования скорости двигателя в рассмотренной схеме равен 1…10. Для управления тиристорами в более сложных схемах используются насыщенные дроссели или устройства на транзисторах и маломощных тиристорах. Примером такого привода может служить привод типа ПКВУ с обратной связью по скорости и промежуточным полупроводниковым усилителем. Мощность привода 8 кВт. В диапазоне скоростей 15… 1500 об/мин колебание скорости вращения двигателя не превышает 5% при М = (0,25…1)МН.
Основным недостатком приводов, в которых регулирование напряжения осуществляется изменением угла открывания тиристоров, является значительное снижение cosφ при уменьшении скорости вращения двигателя. С целью повышения cosφ используют схемы, в которых регулируемое напряжение тиристорного выпрямителя алгебраически суммируется (складывается или вычитается) с постоянным нерегулируемым напряжением.
Способы регулирования частоты вращения электродвигателей постоянного тока
2.1. Основные сведения
Рассмотрим способы регулирования частоты вращения электродвигателей постоянного тока на примере электродвигателя с независимым ( параллельным ) возбуждением.
Уравнение естественной механической характеристики двигателя имеет вид
ω
=  –
–  ,
(13-2)
,
(13-2)
где: ω – угловая скорость якоря;
U – напряжение на обмотке якоря;
k – постоянный коэффициент;
Ф – магнитный проток обмотки ( обмоток ) возбуждения;
М – электромагнитный момент электродвигателя;
R – сопротивление обмотки якоря
электродвигателя.
– сопротивление обмотки якоря
электродвигателя.
Из уравнения (13-2) следует, что скорость двигателей с независимым (параллельным) возбуждением можно регулировать тремя способами:
1. изменением напряжения на обмотке якоря двигателя –U;
2
изменением сопротивления цепи обмотки
якоря –R ;
;
3. изменением магнитного потока полюсов –Ф.
Первый способ регулирования – изменением напряжения на обмотке якоря, применяется только для двигателей с независимым возбуждением в «системах генератор – двигатель».
Второй способ – изменением сопротивления цепи обмотки якоря, на практике осуществляется путем введения добавочных резисторов последовательно с обмоткой якоря.
Этот способ позволяет изменить скорость двигателя только вниз от основной, причем с увеличением сопротивлений скорость двигателя уменьшается. Это объясняется увеличением падения напряжения в добавочных резисторах и уменьшением напряжения на зажимах якоря.
Положительное качество данного способа регулирования –простота, т.к. он осуществляется путем введения (выведения) ступеней регулировочного реостата в цепь обмотки якоря двигателя.
Основным недостатком способа является большой расход энергии в добавочных резисторах.
Этот способ применяется в электроприводах грузоподъемных механизмов и якорно–швартовных устройств на постоянном токе.
Третий способ – изменением магнитного потока полюсов, на практике осуществляется путем введения добавочных резисторов последовательно с параллельной обмоткой возбуждения. При этом магнитный поток возбуждения уменьшается, а скорость якоря увеличивается.
Скорость двигателей, специально сконструированных для работы с регулируемым потоком, может превышать номинальную в три раза и более, скорость остальных двигателей повышается на 10 – 20 %. Верхний предел скорости ограничен условиями коммутации, механической прочности или температурой нагрева двигателя.
Положительное качество данного способа регулирования –экономичность, т.к. расход электроэнергии в регулировочном резисторе мал из-за небольшого значения тока возбуждения в цепи параллельной обмотки.
Основными недостатками способа являются возможность регулирования скорости только вверх от номинальной, а также увеличение тока якоря во столько раз, во сколько раз ослаблен магнитный поток.
Последняя особенность не позволяет применять этот способ регулирования при работе электропривода с номинальным моментом, т.к. при ослаблении потока ток якоря превысит номинальный, что недопустимо.
Поэтому этот способ регулирования применяется в электроприводах грузоподъемных механизмов и якорно –швартовных устройств для получения высоких скоростей при перемещения холостого гака (грузовые лебедки и краны) или швартовного каната (брашпили, шпили), т.е. при небольшой нагрузке на валу электродвигателя.
Регулирование скорости вращения ДПТ
Из выражения механической характеристики (71)  следует, что возможны три способа регулирования скорости вращения:
следует, что возможны три способа регулирования скорости вращения:
1) изменением магнитного потока главных полюсов;
2) изменением сопротивления цепи якоря;
3) регулированием напряжения питающей сети.
 Рассмотрим регулирование скорости для двигателя параллельного возбуждения (рис.25).
Рассмотрим регулирование скорости для двигателя параллельного возбуждения (рис.25).
Рис. 25. Схема включения ДПТ параллельного возбуждения
Механическая характеристика двигателя, снятая при неизменных номинальных значениях напряжения, тока и при номинальных значениях всех сопротивлений, называется естественной механической характеристикой. В противном случае – искусственной.
Для двигателя параллельного возбуждения механическая характеристика имеет вид линейной зависимости:
 , (77)
, (77)
где  и
и  .
.
Рассмотрим все способы регулирования скорости вращения ДПТ.
1) Изменением магнитного потока.
Для изменения магнитного потока требуется изменять ток возбуждения. Для изменения тока возбуждения последовательно с обмоткой возбуждения (ОВ) включается регулировочный реостат, который может увеличивать сопротивление ОВ по отношению к номинальному значению, а значит только уменьшать ток и магнитный поток Ф. Тогда получается:

В выражении механической характеристики коэффициенты n0 и b будут при этом возрастать. На рис. 26 возросшим значениям магнитного потока соответствуют искусственные характеристики 1 и 2. Из характеристик следует, что изменением магнитного потока можно только увеличивать скорость вращения двигателя по сравнению с номинальной  .
.
2) Изменением сопротивления цепи якоря.
Изменение сопротивления цепи якоря  может осуществляться только в сторону увеличения сопротивления. Это можно сделать, включив последовательно с якорем регулировочный реостат.
может осуществляться только в сторону увеличения сопротивления. Это можно сделать, включив последовательно с якорем регулировочный реостат.
Тогда общее сопротивление цепи якоря может только возрасти
 (из- за последовательного соединения реостата), а, значит, возрастает коэффициент b при постоянном значении n0:
(из- за последовательного соединения реостата), а, значит, возрастает коэффициент b при постоянном значении n0:
 .
.
Характеристики, соответствующие этому способу регулирования показаны на рис. 26. (линии 3, 4, 5).
Из характеристик следует, что изменением сопротивления якоря можно только уменьшать скорость вращения по сравнению с .
3) Изменением напряжения питающей сети.
Регулирование напряжения сети осуществляется с помощью регуляторов (например, тиристорных), и поэтому данный способ регулирования применяется в тех случаях, когда требуется специальное управление каким-либо технологическим процессом. В этом случае:
 изменяется, а
изменяется, а  .
.
На рис. 26 такому способу регулирования соответствует характеристика 7.
Рис. 26. Регулировочные характеристики ДПТ
Вопросы для самопроверки
1. Для чего предназначены машины постоянного тока (МПТ)?
2. Для чего предназначен коллектор машины?
3. Какой обмоткой создается магнитное поле МПТ?
4. Какой физический закон лежит в основе принципа работы генератора постоянного тока?
5. Как создается магнитный момент в машине?
6. Запишите выражение ЭДС МПТ и поясните, какие величины в него входят.
7. Запишите выражение электромагнитного вращающего момента МПТ и поясните, какие величины в него входят.
8. Виды потерь в машине постоянного тока.
9. Определение коэффициента полезного действия машины. Зависимость КПД от нагрузки.
10. Способы возбуждения в МПТ. Схемы и определения.
11. Что такое реакция якоря в МПТ, каковы ее последствия и способы снижения ее влияния?
12. Запишите основные уравнения, определяющие работу двигателя постоянного тока.
13. Определение, аналитическое выражение и вид механической характеристики двигателей различного типа возбуждения.
14. Условия пуска двигателя постоянного тока.
15. Проблемы пуска двигателя постоянного тока (ДПТ).
16. Как ограничивают пусковой ток в ДПТ?
17. Перечислите способы регулирования скорости вращения ДПТ.
18. Как регулируется скорость вращения двигателя за счет изменения магнитного потока главных полюсов?
19. Как регулируется скорость вращения двигателя постоянного тока при изменении сопротивления цепи якоря?
Задача 2.Двигатель постоянного тока параллельного возбуждения имеет следующие данные: номинальная мощность  , напряжение питания
, напряжение питания  номинальная скорость вращения n
номинальная скорость вращения n  , сопротивление цепи якоря
, сопротивление цепи якоря  ,сопротивление цепи возбуждения
,сопротивление цепи возбуждения ,номинальный коэффициент полезного действия
,номинальный коэффициент полезного действия  .
.
Определить:
1.Номинальный ток, потребляемый двигателем, номинальный ток якоря и ток возбуждения.
2. Сопротивление пускового реостата  , при котором начальный пусковой ток в цепи якоря составлял 2,5
, при котором начальный пусковой ток в цепи якоря составлял 2,5  .
.
3. Начальный пусковой момент двигателя при заданной кратности пускового тока.
4. Номинальный вращающий момент двигателя.
5. Построить в одной системе координат естественную механическую характеристику и искусственную (при введении пускового реостата ) механическую характеристику. Определить диапазон изменения частоты вращения при номинальной нагрузке.
Таблица 2 Тип двигателя и его данные
Решение
1. Номинальный ток двигателя, номинальный ток якоря и обмотки возбуждения.
Номинальный ток двигателя определяется из соотношений:  ;
; 
Отсюда номинальный ток двигателя: 
Номинальный ток возбуждения:
В двигателе параллельного возбуждения токи связны уравнением (рис. 25):  , где
, где  — номинальные токи обмотки якоря и возбуждения соответственно.
— номинальные токи обмотки якоря и возбуждения соответственно.
Тогда: 
2. Сопротивление пускового реостата  , при котором начальный пусковой ток цепи якоря составляет
, при котором начальный пусковой ток цепи якоря составляет  .
.
Пусковой ток двигателя при наличии реостата в цепи якоря равен:
 откуда
откуда 
По условию  , следовательно:
, следовательно:

3. Начальный пусковой момент двигателя при заданной кратности пускового тока.
Заданная кратность пускового тока .
В двигателе постоянного тока параллельного возбуждения момент
 Так как
Так как  при изменении сопротивления цепи якоря, а
при изменении сопротивления цепи якоря, а  , то момент пропорционален току якоря.
, то момент пропорционален току якоря.
Тогда можно записать 
Отсюда пусковой момент:
 – номинальный момент двигателя.
– номинальный момент двигателя.
Номинальный момент двигателя определим из следующих соображений. Так как из (69)  , и из (52) и (53)
, и из (52) и (53)  и
и  , можно записать
, можно записать  откуда
откуда 
Тогда для номинального момента

Пусковой момент:

4. Естественная механическая характеристика двигателя.
Механическая характеристика линейна, поэтому для ее построения достаточно определить координаты 2-х точек.
Координаты одной точки уже определены: (  ). То есть (175,1Н·м; 600 об/мин).
). То есть (175,1Н·м; 600 об/мин).
Вторая точка соответствует холостому ходу двигателя, т.е. при М=0.
Из уравнения механической характеристики следует, что скорость холостого хода равна 
В номинальном режиме:
 и
и 
Тогда 
Рассмотрим отношение:  , откуда
, откуда
Механическая характеристика строится по точкам:
(175,1Н·м; 600 об/мин) и (0; 634,6 об/мин) ( рис.27).
5. Искусственная механическая характеристика при введении пускового реостата  в одной системе координат с естественной (п.4).
в одной системе координат с естественной (п.4).
Искусственная механическая характеристика также линейна. Кроме того, скорость холостого хода  при номинальном напряжении сети
при номинальном напряжении сети  не зависит от значения сопротивления цепи якоря. То есть одна точка, соответствующая холостому ходу двигателя, остается от предыдущего расчета.
не зависит от значения сопротивления цепи якоря. То есть одна точка, соответствующая холостому ходу двигателя, остается от предыдущего расчета.
Для определения второй точки искусственной характеристики воспользуемся выражениями
 и
и 
где  – скорость двигателя при введении пускового реостата.
– скорость двигателя при введении пускового реостата.
Отсюда: 

6. Диапазон изменения скорости при номинальной нагрузке.
 Диапазон определяется из графика (рис.27): от (380,8 до 600) об/мин.
Диапазон определяется из графика (рис.27): от (380,8 до 600) об/мин.
Рис. 27. Механические характеристики двигателя
АСИНХРОННЫЕ МАШИНЫ (АМ)
Читайте также:
Рекомендуемые страницы:
Поиск по сайту
5. Объяснить способы регулирования частоты вращения двигателя параллельного возбуждения.
Двигатели постоянного тока дают возможность плавно и экономично регулировать скорость вращения в широких пределах. В результате этого весьма ценного свойства двигатели постоянного тока получили широкое распространение и часто являются незаменимыми.
Число оборотов якоря двигателя при любой схеме возбуждения определяется следующим выражением:

где rс — сопротивление последовательной обмотки возбуждения (для двигателя параллельного возбуждения rс=0). Это выражение показывает, что изменение скорости вращения двигателя можно осуществить изменением напряжения сети, сопротивления цепи якоря и магнитного потока.
Регулирование скорости вращения изменением напряжения сети осуществляется в случае, когда источником электрической энергий двигателя является какой-либо генератор.
Для регулирования скорости вращения двигателя изменением сопротивления цепи якоря используется регулировочный реостат, включенный последовательно с якорем. В отличие от пускового регулировочный реостат должен быть рассчитан на длительное прохождение тока. В сопротивлении регулировочного реостата происходит большая потеря энергии, вследствие чего резко уменьшается к п. д. двигателя.
Регулирование скорости вращения якоря двигателя изменением магнитного потока производится изменением тока в обмотке возбуждения. В двигателях параллельного и смешанного возбуждения включается регулировочный реостат. В двигателях последовательного возбуждения изменение тока в обмотке возбуждения достигается шунтированием этой обмотки каким-либо регулируемым сопротивлением. Этот способ регулирования скорости не создает дополнительных потерь и экономичен.
6 . В каком случае и почему возможен «разнос» двигателя параллельного возбуждения?
С увеличением нагрузки скорость двигателя резко падает.
С уменьшением нагрузки на валу двигатель развивает очень большую частоту вращения. Говорят, что двигатель идет вразнос. Работа двигателя последовательного возбуждения без нагрузки недопустима.
7. Изобразить схему двигателя параллельного возбуждения и показать на ней токи и эдс.
В параллельных ветвях действуют одинаковые ЭДС, направленные встречно друг другу. При подключении к якорной обмотке сопротивления в параллельных ветвях возникают одинаковые токи , через сопротивление RH протекает ток IЯ.
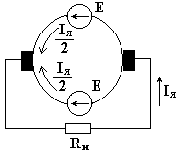
рис4 схема
ЭДС якорной обмотки пропорциональна частоте вращения якоря n2 и магнитному потоку индуктора Ф
где Се — константа.
В реальных электрических машинах постоянного тока используется специальное контактное устройство — коллектор. Коллектор устанавливается на одном валу с сердечником якоря и состоит из отдельных изолированных друг от друга и от вала якоря медных пластин. Каждая из пластин соединена с одним или несколькими проводниками якорной обмотки. На коллектор накладываются неподвижные контактные щетки. С помощью контактных щеток вращающаяся якорная обмотка соединяется с сетью постоянного тока или с нагрузкой.