Схема пуска асинхронного двигателя | Сайт электрика
Всем привет. Тема сегодняшней статьи это схема пуска асинхронного двигателя. Как по мне, то эта схема самая простоя, какая только может быть в электротехнике. В этой статье я вам приготовил две схемы. На первом рисунке будет схема с предохранителем для защиты цепей управления, а на втором будет без предохранителя. Отличие этих схем в том, что предохранитель служит как дополнительный элемент для защиты цепи от короткого замыкания и так же как защита от самопроизвольного включения. К примеру, если вам нужно выполнить какие-то работы на электроприводе, то вы разбираете электрическую схему путём выключения автомата и дополнительно ещё нужно вынуть предохранитель и после этого уже можно приступать к работе.
И так рассмотрим первую схему. Для увеличения картинки нажмите на неё.
Рисунок 1. Пуск асинхронного электродвигателя с короткозамкнутым ротором.
QF – любой автоматический выключатель.
KM – электромагнитный пускатель или контактор.
SB1 – это кнопка стоп
SB2 – кнопка пуск
KK – любое тепловое реле, а также контакт теплового реле.
FU – предохранитель.
КК – тепловое реле, контакты теплового реле.
М – асинхронный двигатель.
Теперь опишем сам процесс запуска двигателя.
Всю эту схему можно условно разделить на силовую – это то что находится слева, и на схему управления – это то что находиться справа. Для начала на всю электрическую цепь нужно подать напряжение путём включения автомата QF. И напряжение подаются на неподвижные контакты пускателя и на цепь управления. Далее нажимаем кнопку пуска SB2, при этом действии напряжение подается на катушку пускателя и он втягивается и подаётся также напряжение на обмотки статора и электродвигатель начинает вращаться. Одновременно с силовыми контактами на пускателе замыкаются и блок-контакты КМ через которые подаётся напряжение на катушку пускателя и кнопку SB2 можно отпустить.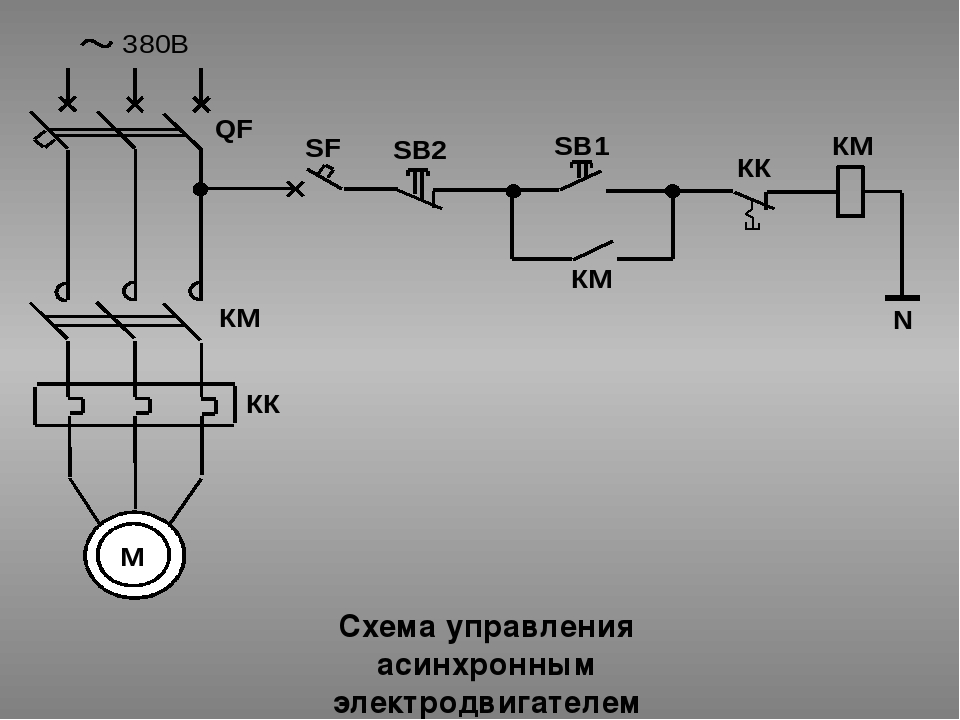
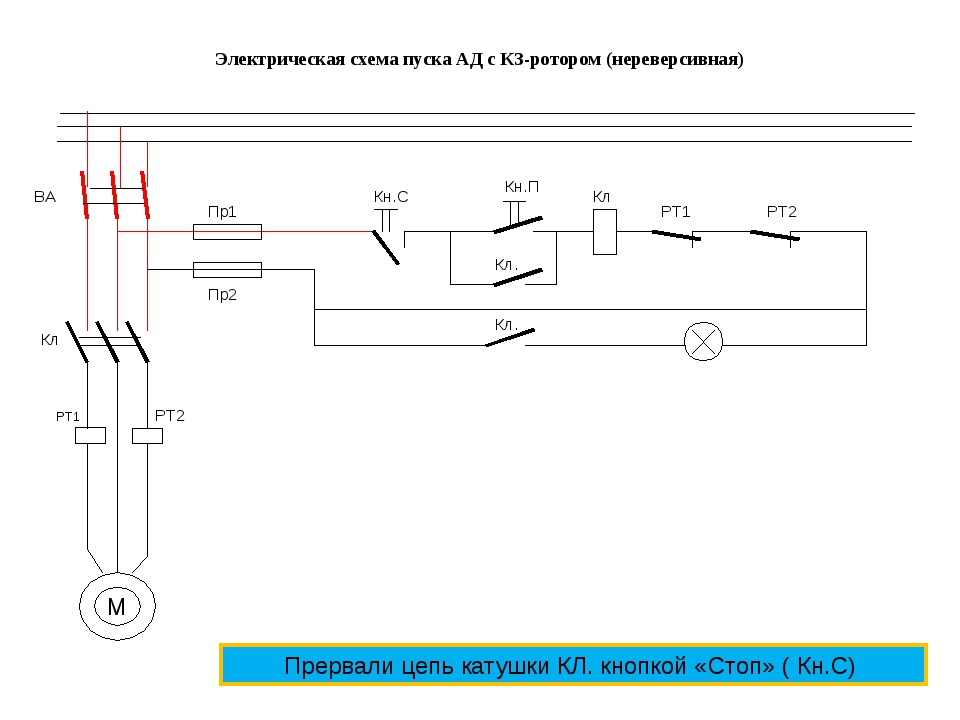
Рисунок 2. Пуск асинхронного электродвигателя. В цепи управления нет предохранителя. Для увеличения картинки нажмите на неё.
Для того чтобы прекратить работу электродвигателя, достаточно всего лишь нажать на кнопку SB1. Этим действием мы разрываем цепь управления и прекращается подача напряжения на катушку пускателя, и силовые контакты размыкаются и как следствие пропадает напряжение на обмотках статора, и он останавливается. Останавливать так же легко, как и запускать.
Вот в принципе и вся схема пуска асинхронного двигателя. Если статья вам чем то помогла, то поделитесь нею в соц. сетях, а так же подпишитесь на обновления блога.
С уважением Семак Александр!
Читайте также статьи:
Прямой и реостатный пуск асинхронного двигателя
Пуск асинхронных двигателей с короткозамкнутым ротором можно осуществлять различными способами. Все они отличаются друг от друга и хороши в различных ситуациях по-своему.
Прямой пуск
Наиболее распространенным способом запуска асинхронного двигателя с короткозамкнутым ротором является прямой пуск. Говоря о прямом пуске, мы имеем виду прямое включение в сеть асинхронного двигателя, на номинальном напряжении и постоянной частоте. При этом двигатель достаточно быстро набирает номинальные обороты. Такой способ является наиболее экономически выгодным, потому что не требует затрат на дополнительные устройства.
Прямой пуск применяется в основном для маломощных двигателей, потому что они создают относительно небольшой момент сопротивления в момент запуска. Но даже для его преодоления двигателю требуется произвести значительную работу. Ведь при запуске даже таких маломощных двигателей прямым пуском, можно получить пусковые токи которые превышают номинальные в 10-12 раз! Несомненно, это сказывается на питающей сети, а также кабелях подключенных к АД. Также высокие пусковые токи оказывают значительное влияние на обмотку самого двигателя, что тоже отрицательно на ней сказывается.
Реостатный пуск
Если не требуются большие значения пусковых моментов, то на практике часто прибегают к реостатному способу пуска.
Схема реостатного пуска:
Суть способа состоит в том, что в момент пуска, двигатель подсоединен к реостатам, затем с помощью контактора k2, реостаты закорачиваются. Таким образом, часть напряжения питающей сети падает на них, при этом двигатель разгоняется на пониженном напряжении. Это позволяет снизить практически в два раза пусковые токи, по сравнению с токами на полном напряжении и в квадрат раз снизить пусковой момент. Естественно, это лишает этот метод некоторых недостатков, которые присутствуют при прямом пуске. А именно — снижаются нагрузки на механическую часть и просадки напряжения питающей сети.
Рекомендуем к прочтению статью — устройство плавного пуска асинхронного двигателя.
Схема управления асинхронным двигателем с короткозамкнутым ротором. Схема пуска асинхронного двигателя
Схема управления электродвигателем
Функциональная cхема управления асинхронным двигателем с короткозамкнутым ротором изображена на рисунке 1.
Рис.1.Функциональная схема управления асинхронным двигателем.
Трёхфазный переменный ток подаётся на автоматический выключатель, который применяется для подключения трёхфазного асинхронного двигателя. В автоматическом выключателе помимо системы контактов, имеются комбинированные расцепители (тепловой и электромагнитный), что обеспечивает автоматическое отключение при длительной перегрузке и коротком замыкании. От автоматического выключателя питание подаётся на магнитный пускатель. Магнитный пускатель — аппарат для дистанционного управления двигателем. Он осуществляет пуск, остановку и защиту двигателя от перегрева и сильного снижения напряжения. Основная часть магнитного пускателя — трёхполюсный электромагнитный контактор. От магнитного пускателя управление передаётся трёхфазному асинхронному электродвигателю переменного тока. Асинхронный двигатель отличается простотой конструкции и несложностью обслуживания. Он состоит из двух основных частей — статора — неподвижной части и ротора — вращающейся части. Статор имеет пазы, в которые укладывается трёхфазная статорная обмотка, подключаемая к сети переменного тока. Эта обмотка предназначена для создания вращающего кругового магнитного поля. Вращение кругового магнитного поля обеспечивается сдвигом по фазе друг относительно друга каждой из трёх систем трёхфазного тока на угол, равный 120 градусам.
Он осуществляет пуск, остановку и защиту двигателя от перегрева и сильного снижения напряжения. Основная часть магнитного пускателя — трёхполюсный электромагнитный контактор. От магнитного пускателя управление передаётся трёхфазному асинхронному электродвигателю переменного тока. Асинхронный двигатель отличается простотой конструкции и несложностью обслуживания. Он состоит из двух основных частей — статора — неподвижной части и ротора — вращающейся части. Статор имеет пазы, в которые укладывается трёхфазная статорная обмотка, подключаемая к сети переменного тока. Эта обмотка предназначена для создания вращающего кругового магнитного поля. Вращение кругового магнитного поля обеспечивается сдвигом по фазе друг относительно друга каждой из трёх систем трёхфазного тока на угол, равный 120 градусам.
Обмотки статора для подключения к напряжению сети 220В соединены треугольником (Рис.8). В зависимости от типа обмотки ротора, машины могут быть с фазным и короткозамкнутым ротором. Несмотря на то, что двигатель с фазным ротором обладает лучшими пусковыми и регулировочными свойствами, двигатель с короткозамкнутым ротором проще и надёжнее в эксплуатации, а также дешевле.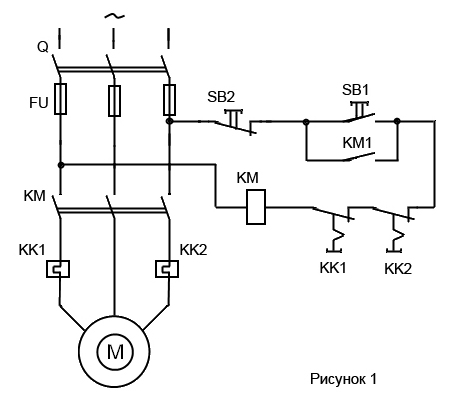 Я выбрал двигатель с короткозамкнутым ротором, так как в настоящее время большинство изготовляемых промышленностью двигателей являются двигателями с короткозамкнутым ротором. Обмотка ротора выполняется по типу беличьего колеса, в пазы ротора заливают под давлением горячий алюминий. Проводники обмотки ротора соединены, образуя трёхфазную систему. Двигатель приводит в движение вентилятор. Вентиляторы, применяемые на судах, различают в зависимости от создаваемого ими напора. Смонтированный в схеме вентилятор является вентилятором низкого давления. Обычно вентиляторы не регулируются и не реверсируются, поэтому их привод имеет простейшую схему управления, которая сводится к пуску, остановке и защите.
Я выбрал двигатель с короткозамкнутым ротором, так как в настоящее время большинство изготовляемых промышленностью двигателей являются двигателями с короткозамкнутым ротором. Обмотка ротора выполняется по типу беличьего колеса, в пазы ротора заливают под давлением горячий алюминий. Проводники обмотки ротора соединены, образуя трёхфазную систему. Двигатель приводит в движение вентилятор. Вентиляторы, применяемые на судах, различают в зависимости от создаваемого ими напора. Смонтированный в схеме вентилятор является вентилятором низкого давления. Обычно вентиляторы не регулируются и не реверсируются, поэтому их привод имеет простейшую схему управления, которая сводится к пуску, остановке и защите.
Принципиальная электрическая схема нереверсивного управления трёхфазным асинхронным электродвигателем с короткозамкнутым ротором посредством автоматического выключателя и магнитного пускателя с двухполюсным тепловым реле представлена на рисунке 2.
От силового щита питание подаётся на автоматический выключатель с тепловыми и электромагнитными расцепителями максимального тока.
Рис.2.Схема управления асинхронным двигателем с короткозамкнутой обмоткой ротора.
Так, главные замыкающие контакты линейного трёхполюсного контактора, находящиеся в силовой цепи, его катушка и вспомогательные замыкающие контакты, находящиеся в цепи управления, обозначены буквами КЛ. Нагревательные элементы теплового реле, включённые в силовую цепь, и остающиеся размыкающие контакты с ручным возвратом этого же реле в исходное положение, которые находятся в цепи управления, обозначены буквами РТ. При включенном трёхполюсном выключателе после нажатия пусковой кнопки КнП включается катушка линейного трёхполюсного контактора КЛ и его главные замыкающие контакты КЛ присоединяют обмотку статора трёхфазного асинхронного двигателя АД к питающей сети в результате чего ротор приходит во вращение.
Основные элементы схемы и их назначение
Автоматический выключатель — аппарат для нечастой ручной коммутации электрических цепей и автоматической защиты их при коротких замыканиях и длительной перегрузке. Назначение автоматического выключателя, применённого в схеме, описано в таблице 1.
Таблица1. Область применения автоматического выключателя.
Как видно из таблицы 1 автомат не отключается при резком снижении напряжения, так как расцепитель минимального напряжения в применяемом автоматическом выключателе отсутствует. Защиту при значительном снижении или исчезновении напряжения питающей сети осуществляет магнитный пускатель.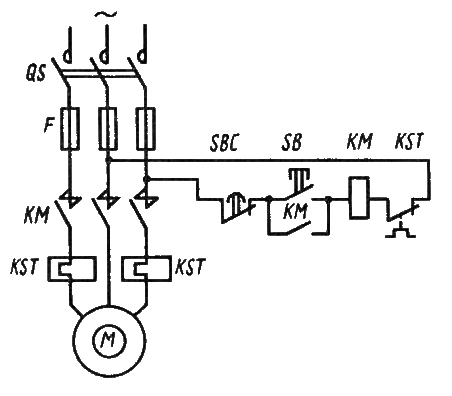
Автоматы используют при напряжении до 660В на номинальные токи от 15 до 600А, в помещениях с нормальной окружающей средой, так как они не приспособлены для работы в средах с едкими парами и газами, во взрывоопасных и незащищённых от попадания воды местах. Автоматы необходимо не реже 1 раза в год осматривать, чистить, смазывать шарнирные механизмы приборным маслом. Для своей схемы я выбрал автоматический выключатель серии АП-50. Внешний вид автомата показан на рисунке 3.
1- кнопка выключения, 2-кнопка включения, 3- реле, 4-искрогасительные камеры, 5-пластмассовый кожух
Рис3. Внешний вид и устройство автомата АП-50.
Он предназначен для защиты от перегрузок и токов короткого замыкания при U питающей сети до 500В, 50 гц на переменном токе, для ручного включения и отключения цепей, а главное для пуска и защиты трёхфазных асинхронных двигателей с короткозамкнутым ротором. Выключатель защищён пластмассовым кожухом. Наличие буквы Б в серии АП-50Б означает универсальное исполнение, при котором ввод и вывод проводов снизу и сверху через сальники типа СКВрт-33.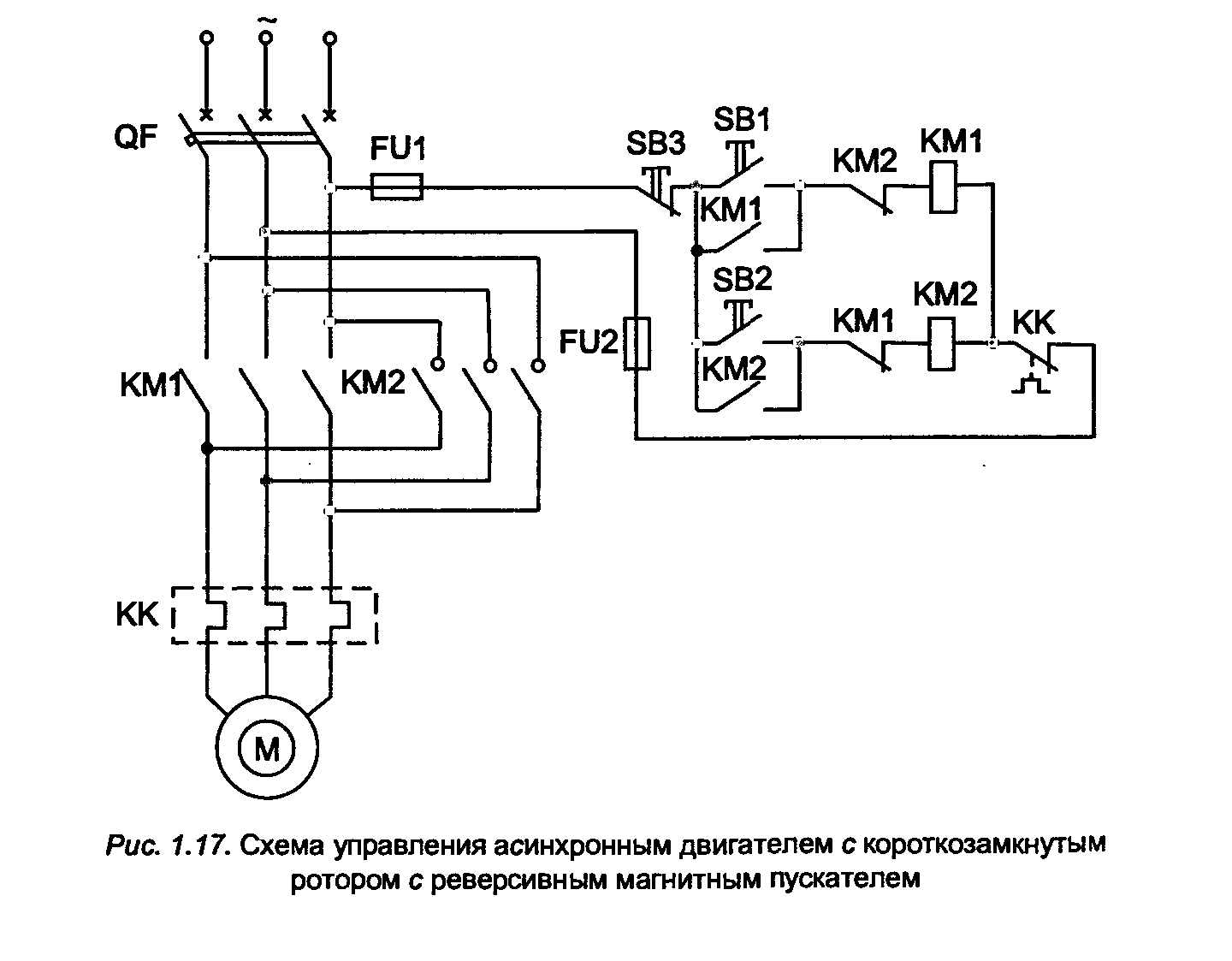 Маркировка АП-50Б-3МТ означает наличие электромагнитных и тепловых расцепителей и число полюсов равное трём.
Маркировка АП-50Б-3МТ означает наличие электромагнитных и тепловых расцепителей и число полюсов равное трём.
Магнитный пускатель — коммутационный аппарат дистанционного управления, для частых включений и отключений электрооборудования, которым управляют с помощью отдельно расположенной кнопки. Это устройство для пуска, остановки и защиты электродвигателей. Назначение магнитного пускателя, применённого в схеме, представлено в таблице 2.
Типовые схемы управления электроприводов с АД
АД с короткозамкнутым ротором малой и средней мощности пускаются прямым подключением к сети без ограничения пусковых токов. Схемы управления АД с фазным ротором средней и большой мощности должны предусматривать ограничение токов при их пуске, реверсе и торможении с помощью добавочных резисторов в цепи ротора.
Реверсивная схема управления АД с короткозамкнутым ротором приведена на рисунке 8.9.
Рис. 8.9. Реверсивная схема управления АД с короткозамкнутым ротором
Основным элементом этой схемы является реверсивный магнитный пускатель, который включает в себя два линейных контактораКМ1 и КМ2 и два тепловых реле защиты КК. Схема обеспечивает прямой пуск и реверс двигателя, а также торможение противовключением при ручном (неавтоматическом) управлении.
Схема обеспечивает прямой пуск и реверс двигателя, а также торможение противовключением при ручном (неавтоматическом) управлении.
В схеме предусмотрена защита от перегрузок двигателя (реле КК) и коротких замыканий в цепи статора (автоматический выключатель QF) и управления (предохранители FA). Кроме того, схема управления обеспечивает и нулевую защиту от исчезновения (снижения) напряжения сети (контакторы КМ1и КМ2).
Пуск двигателя при включенном автоматическом выключателе QF в условных направлениях «Вперед» или «Назад» осуществляется нажатием соответственно кнопок SB1 или SB2. Это приводит к срабатыванию контактора КМ1 или КМ2, подключению двигателя к сети и его разбегу.
Для реверса или торможения двигателя вначале нажимается кнопка SB3, что приводит к отключению включенного до сих пор контактора (например, КМ1), после чего нажимается кнопка SB2. Это приводит к включению контактора КМ2 и подаче на АД напряжения источника питания с другим порядком чередования фаз. Магнитное поле двигателя изменяет направление вращения на противоположное, и начинается процесс реверса, состоящий из двух этапов: торможения противовключением и разбега в противоположную сторону.
Магнитное поле двигателя изменяет направление вращения на противоположное, и начинается процесс реверса, состоящий из двух этапов: торможения противовключением и разбега в противоположную сторону.
В случае необходимости только торможения двигателя при достижении им нулевой скорости должна быть вновь нажата кнопка SB3, что приведет к отключению двигателя от сети и возвращению схемы в исходное положение. Если кнопка SB3 нажата не будет, то это приведет к разбегу двигателя в другую сторону, т.е. к его реверсу.
Во избежание короткого замыкания в цепи статора, которое может возникнуть в результате одновременного ошибочного нажатия кнопок SB1 и SB2, в реверсивных магнитных пускателях иногда предусматривается специальная механическая блокировка. Она представляет собой рычажную систему, которая предотвращает втягивание одного контактора, если включен другой. В дополнение к механической блокировке в схеме используется типовая электрическая блокировка, применяемая в реверсивных схемах управления. Она предусматривает перекрестное включение размыкающих контактов аппарата КМ1 в цепь катушки аппарата КМ2 и наоборот.
Она предусматривает перекрестное включение размыкающих контактов аппарата КМ1 в цепь катушки аппарата КМ2 и наоборот.
Отметим, что повышению надежности и удобства в эксплуатации способствует использование в схеме воздушного автоматического выключателя QF. Его наличие исключает возможность работы привода при обрыве одной фазы, при однофазном коротком замыкании, как это может иметь место при установке предохранителей, а также он не требует замены элементов (как в предохранителях при сгорании их плавкой вставки).
Схема управления АД, обеспечивающая прямой пуск и динамическое торможение в функции времени, приведена на рис. 8.10.
Рис. 8.10. Схема пуска и динамического торможения АД
Пуск двигателя осуществляется нажатием кнопки SB1, после чего срабатывает линейный контактор КМ, подключающий двигатель к источнику питания. Одновременно с этим замыкание контакта КМ в цепи реле времени КТ вызовет его срабатывание и замыкание его контакта в цепи контактора торможения КМ1. Однако последний не срабатывает, так как перед этим разомкнулся в этой цепи размыкающий контакт КМ.
Однако последний не срабатывает, так как перед этим разомкнулся в этой цепи размыкающий контакт КМ.
Для остановки двигателя нажимается кнопка SB3, контактор КМ отключается, размыкая свои контакты в цепи статора двигателя и отключая тем самым его от сети переменного тока. Одновременно с этим замыкается контакт КМ в цепи аппарата КМ1 и размыкается контакт КМ в цепи реле КТ. Это приводит к включению контактора торможения КМ1, подаче в обмотки статора постоянного тока от выпрямителя V через резистор Rт и переводу двигателя в режим динамического торможения.
Реле времени КТ, потеряв питание, начинает отсчет выдержки времени. Через интервал времени, соответствующий времени останова двигателя, реле КТ размыкает свой контакт в цепи контактора КМ1, тот отключается, прекращая подачу постоянного тока в цепь статора. Схема возвращается в исходное положение.
Интенсивность динамического торможения регулируется резистором Rт, с помощью которого устанавливается необходимый постоянный ток в статоре двигателя.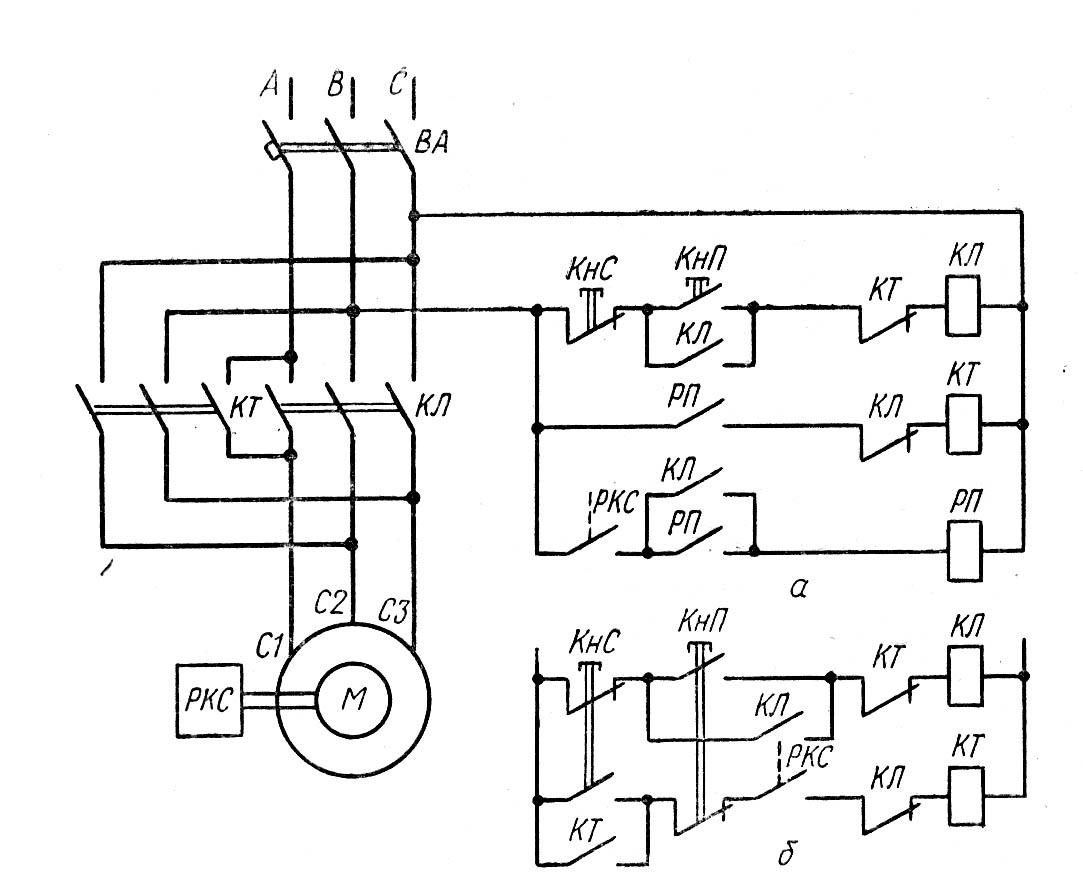
Для исключения возможности одновременного подключения статора к источникам переменного и постоянного тока в схеме использована типовая блокировка с помощью размыкающих контактов КМ и КМ1, включенных перекрестно в цепи катушек этих аппаратов.
Схема управления пуском и торможением противовключением АД с фазным ротором в функции ЭДС приведена на рисунке 8.11.
Рис. 8.11. Схема управления пуском и торможением противовключением АД
с фазным ротором
После подачи напряжения включается реле времени КТ, которое своим размыкающим контактом разрывает цепь питания контактора КМ3, предотвращая тем самым его включение и преждевременное закорачивание пусковых резисторов в цепи ротора.
Включение двигателя производится нажатием кнопки SB1, после чего включается контактор КМ1. Статор двигателя подсоединяется к сети, электромагнитный тормоз YB растормаживается, и начинается разбег двигателя. Включение КМ1 одновременно приводит к срабатыванию контактора КМ4, который своим контактом шунтирует ненужный при пуске резистор противовключения R
д2 , а также разрывает цепь катушки реле времени КТ.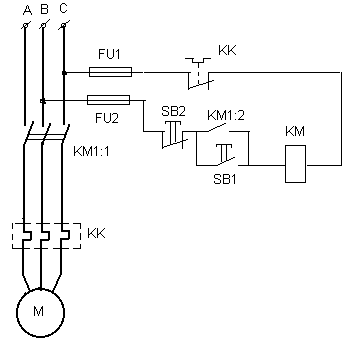 Последнее, потеряв питание, начинает отсчет выдержки времени, после чего замыкает свой контакт в цепи катушки контактора КМ3, который срабатывает и шунтирует пусковой резистор R
д1 в цепи ротора, и двигатель выходит на свою естественную характеристику.
Последнее, потеряв питание, начинает отсчет выдержки времени, после чего замыкает свой контакт в цепи катушки контактора КМ3, который срабатывает и шунтирует пусковой резистор R
д1 в цепи ротора, и двигатель выходит на свою естественную характеристику.
Управление торможением обеспечивает реле торможения KV, контролирующее уровень ЭДС (скорости) ротора. С помощью резистора R р оно отрегулировано таким образом, что при пуске, когда скольжение двигателя 0
Для осуществления торможения
двигателя нажимается сдвоенная кнопка SB2, размыкающий контакт которой разрывает цепь питания катушки контактора КМ1. После этого двигатель отключается от сети и разрывается цепь питания контактора КМ4, и замыкается цепь питания реле КТ. В результате этого контакторы КМ3 и КМ4 отключаются, и в цепь ротора двигателя вводится сопротивление R д1 + R д2 .Нажатие кнопки SB2 приводит одновременно к замыканию цепи питания катушки контактора КМ2, который, включившись, вновь подключает двигатель к сети, но уже с другим чередованием фаз сетевого напряжения на статоре.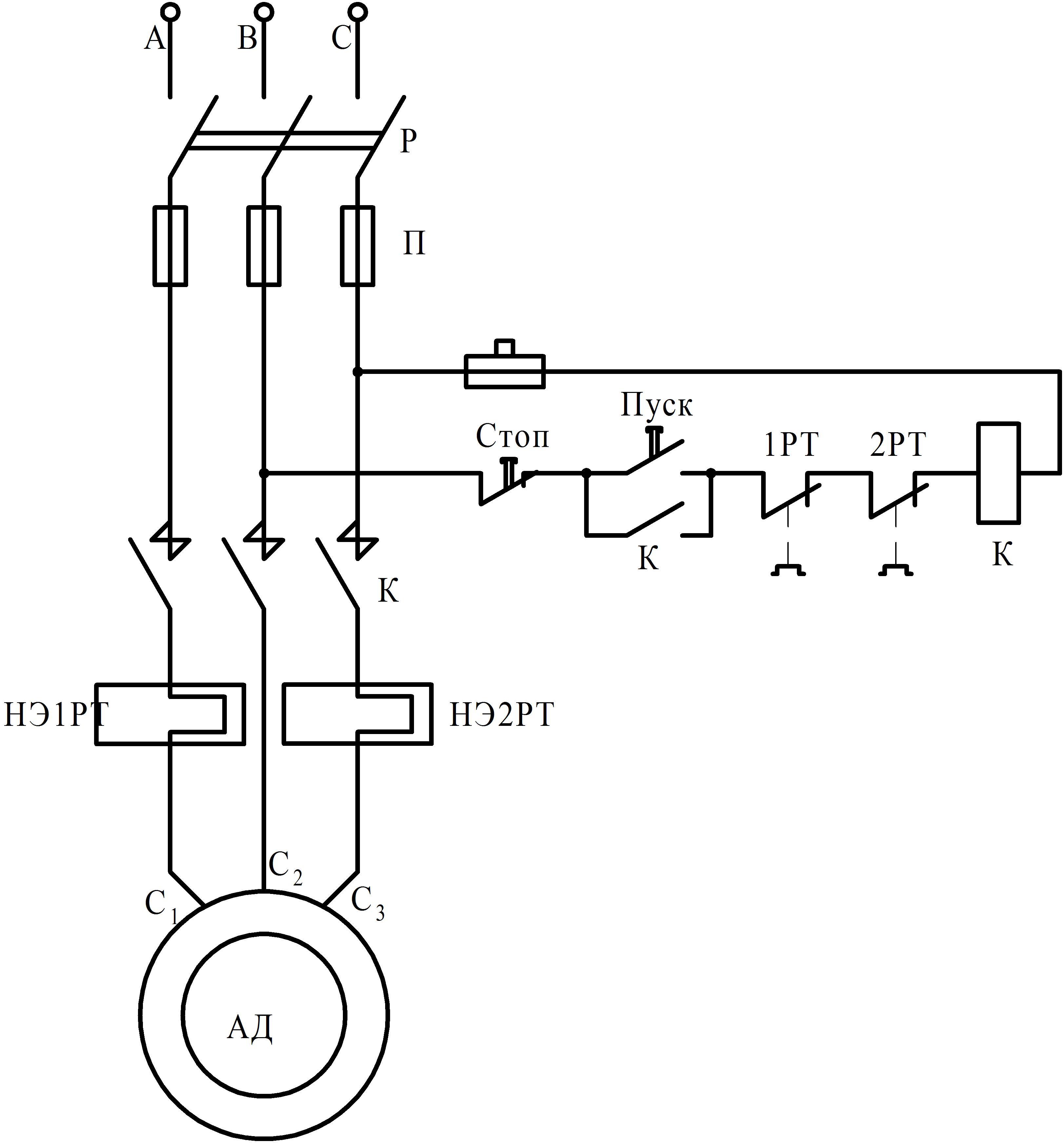 Двигатель переходит в режим торможения противовключением. Реле RY срабатывает и после отпускания кнопки SB2 будет обеспечивать питание контактора КМ2 через свой контакт и замыкающий контакт этого аппарата.
Двигатель переходит в режим торможения противовключением. Реле RY срабатывает и после отпускания кнопки SB2 будет обеспечивать питание контактора КМ2 через свой контакт и замыкающий контакт этого аппарата.
В конце торможения, когда скорость будет близка к нулю и ЭДС ротора уменьшится, реле КV отключится и своим размыкающим контактом разомкнет цепь катушки контактора КМ2. Последний, потеряв питание, отключит двигатель от сети, и схема придет в исходное положение. После отключения КМ2 тормоз УВ, потеряв питание, обеспечит фиксацию (торможение) вала двигателя.
На рисунке 8.12. приведена схема панели типа ПДУ 6220.
Панель типа ПДУ 6220 входит в состав нормализованной серии панелей управления двигателей с фазным и короткозамкнутым ротором и обеспечивает пуск двигателей в две ступени и динамическое торможение по принципу времени.
При подаче на схему напряжений 220 В и переменного тока 380 В (замыкание рубильников QS
1 и QS 2 и автомата QF) включается реле времени КТ1, чем подготавливается двигатель к пуску с полным пусковым резистором в цепи ротора.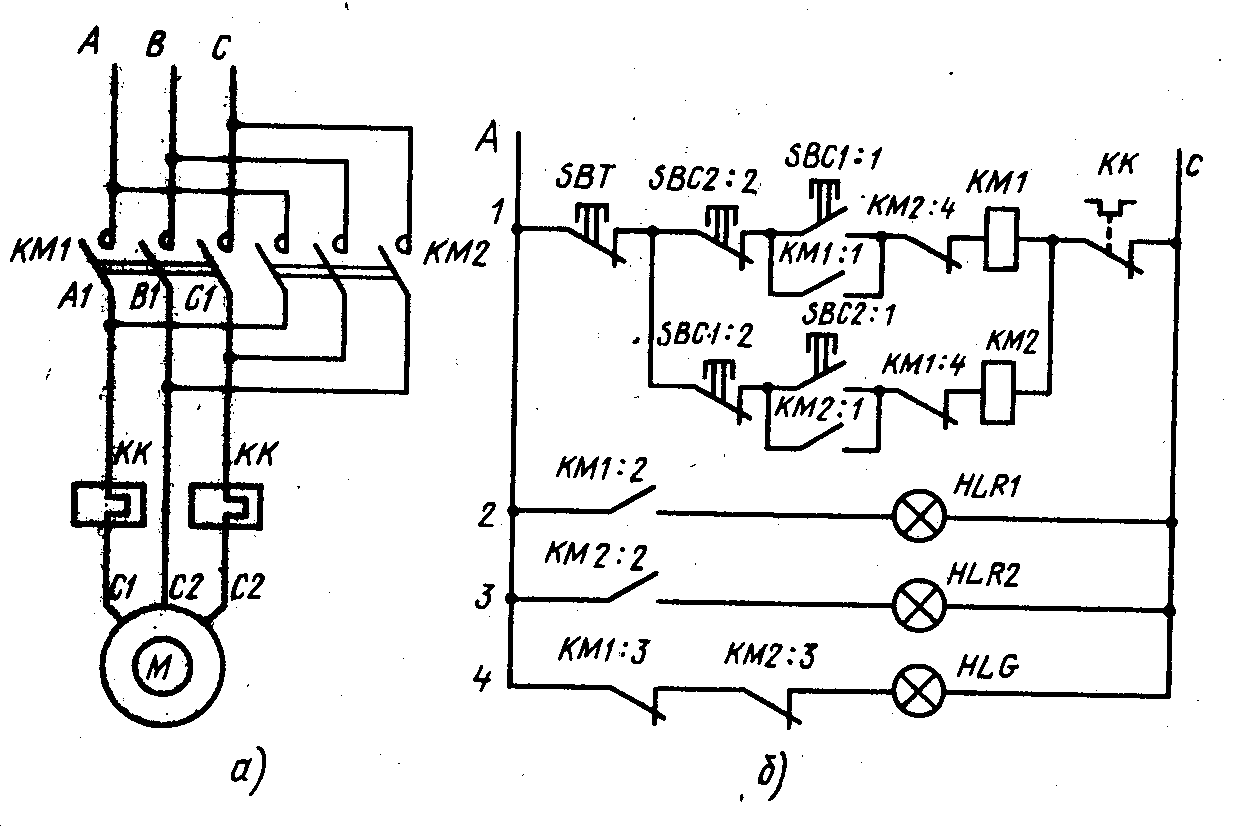 Одновременно с этим, если рукоятка командоконтроллера находится в нулевой (средней) позиции и максимально-токовые реле FА1-FА3 не включены, включится реле защиты КV от понижения питающего напряжения и подготовит схему к работе.
Одновременно с этим, если рукоятка командоконтроллера находится в нулевой (средней) позиции и максимально-токовые реле FА1-FА3 не включены, включится реле защиты КV от понижения питающего напряжения и подготовит схему к работе.
Рис. 8.12. Схема панели типа ПДУ 6220
Пуск двигателя осуществляется по любой из двух искусственных характеристик или естественной характеристике, для чего рукоятка SА должна устанавливаться соответственно в положение 1, 2 или 3. При переводе рукоятки в любое из указанных положений SА включается линейный контактор КМ2, подключающий двигатель к сети, контактор управления тормозом КМ5, подключающий к сети катушку YА электромагнитного тормоза, который при этом растормаживает двигатель и реле времени КТ3, управляющее процессом динамического торможения. При переводе SА в положение 2 или 3 включаются контакторы ускорения КМ3 и КМ4, и двигатель начинает разгоняться.
Торможение двигателя происходит при переводе рукоятки SА в нулевое (среднее) положение. При этом отключатся контакторы КМ2 и КМ5 и включится контактор динамического торможения КМ1, который подключит двигатель к источнику постоянного тока. В результате этого будет идти интенсивный процесс комбинированного (механического и динамического) торможения двигателя, который закончится после отсчета реле КТ3 своей выдержки времени, соответствующей времени торможения.
При этом отключатся контакторы КМ2 и КМ5 и включится контактор динамического торможения КМ1, который подключит двигатель к источнику постоянного тока. В результате этого будет идти интенсивный процесс комбинированного (механического и динамического) торможения двигателя, который закончится после отсчета реле КТ3 своей выдержки времени, соответствующей времени торможения.
Схема асинхронного электропривода с тиристорным пусковым устройством приведена на рисунке 8.13.
к ак
Рис. 8.13. Схема асинхронного ЭП
с тиристорным пусковым устройством
Эффективным методом формирования желаемых графиков изменения тока и момента двигателя в переходных режимах является регулирование напряжения на его статоре с помощью тиристорных пусковых устройств (ТПУ). Чаще всего это делается для ограничения тока и момента двигателя при пуске («мягкий» способ пуска), хотя с помощью этих устройств можно обеспечить и повышение момента двигателя при пуске («жесткий» способ пуска).
Тиристорное пусковое устройство включается между источником питания (сетью переменного тока) с напряжением U
1 и статором двигателя. В нереверсивном ТПУ его силовую часть образуют три пары встречно-параллельно включенных тиристоров VS1-VS6, управление которыми осуществляется импульсами напряжения, поступающими на них от системы импульсно-фазового управления (СИФУ). Ограничение тока и момента осуществляется за счет снижения подводимого к двигателю напряжения, что достигается соответствующим изменением во времени угла управления тиристорами. Напряжение при пуске может изменяться по различным законам – линейно нарастать от нуля до сетевого, быть пониженным в течение всего времени пуска или изменяться по так называемому бустерному варианту, при котором для облегчения пуска двигателя на него вначале подается скачком некоторое напряжение, которое затем продолжает нарастать уже по линейному закону. В замкнутой системе может быть обеспечено и поддержание тока статора на заданном уровне.
8.6. Регулирование координат асинхронного двигателя
с помощью резисторов
Данный способ регулирования координат, называемый часто реостатным, может быть осуществлен введением добавочных активных резисторов в статорные или роторные цепи АД (см. рис. 8.14). Он привлекает в первую очередь простотой своей реализации, отличаясь в то же время невысокими показателями качества регулирования и экономичностью.
Рис. 8.14. Схемы включения АД с фазным ротором (а)
и с короткозамкнутым ротором (б)
1д в цепь статора применяется главным образом для регулирования (ограничения) в переходных процессах тока и момента АД с короткозамкнутым ротором.
Все искусственные электромеханические характеристики располагаются в первом квадранте ниже и левее естественной. С учетом того, что скорость идеального холостого хода ω
0 при включении R 1д не изменяется, получаемые искусственные электромеханические характеристики можно представить семейством кривых (рис.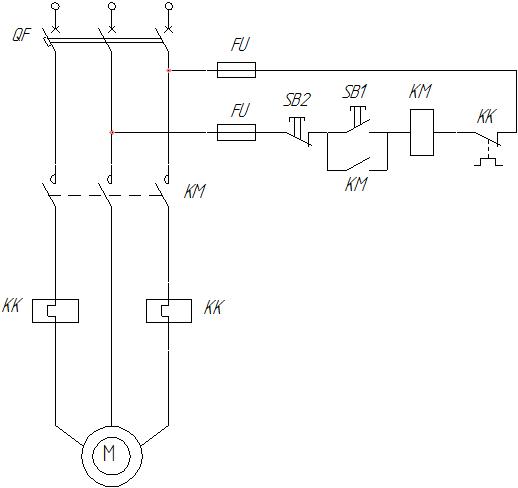 8.15 а).
8.15 а).
а) б)
Рис.8.15. Электромеханические (а) и механические (б) характеристики АД
при регулировании координат с помощью резисторов в цепи статора
Характеристики 2–4 расположены ниже естественной характеристики 1, построенной при R 1д = 0, причем большему значению R 1д соответствует больший наклон искусственных характеристик 2-4.
Механические характеристики АД представлены на рисунке 8.15 б.
Координаты точки экстремума М к и S к изменяются при варьировании R 1д , а именно: в соответствии с (8.15) и (8.16) при увеличении R 1д критический момент М к и критическое скольжение S к уменьшаются. Уменьшается и пусковой момент.
В то же время искусственные механические характеристики (рис. 8.15б) мало пригодны при регулировании скорости АД: они обеспечивают небольшой диапазон изменения скорости; жесткость характеристик АД и его перегрузочная способность, характеризуемая критическим моментом, по мере увеличения R 1д снижается; способ отличает и низкая экономичность.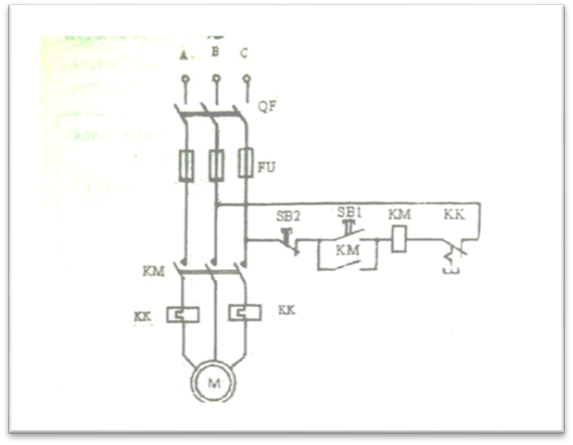 В силу этих недостатков регулирование скорости АД с помощью активных резисторов в цепи его статора применяется редко .
В силу этих недостатков регулирование скорости АД с помощью активных резисторов в цепи его статора применяется редко .
Включение добавочных резисторов R 2д в цепь ротора применяется как с целью регулирования тока и момента АД, так и его скорости (рис. 8.14а).
Искусственные электромеханические характеристики при R 2д = var имеют вид, показанный на рисунке 8.15а, и могут использоваться для регулирования (ограничения) пускового тока I кз = I п .
Скорость идеального холостого хода АД ω 0 и максимальный (критический) момент двигателя М к в соответствии с остаются неизменными при регулировании R 2д , а критическое скольжение S к , как это следует из , изменяется.
Выполненный анализ позволяет построить естественную 1 (R
2д = 0) и искусственные 2–3 (R
2д3 > R 2д2 ) характеристики (рис. 8.16) и сделать заключение, что за счет изменения R
2д имеется возможность повышать пусковой момент АД вплоть до критического момента М
к без снижения перегрузочной способности двигателя, что весьма важно при регулировании его скорости.
Рис. 8.16. Механические характеристики при различных сопротивлениях R 2д добавочного резистора в цепи ротора
В остальном рассматриваемый способ характеризуется такими же показателями, что и для ДПТ НВ. Диапазон регулирования скорости небольшой – около 2–3 – из-за снижения жесткости характеристик и роста потерь по мере его увеличения. Плавность регулирования скорости, которая изменяется только вниз от основной, определяется плавностью изменения добавочного резистора R 2д .
Затраты, связанные с созданием данной системы ЭП, невелики, так как для регулирования обычно используются простые и дешевые резисторов. В то же время эксплуатационные затраты оказываются значительными, поскольку велики потери в ПД.
С увеличением скольжения S возрастают потери в роторной цепи, поэтому реализация большого диапазона регулирования скорости приводит к значительным потерям энергии и снижению КПД ЭП.
Регулирование скорости этим способом осуществляется при небольшом диапазоне регулирования скорости или кратковременной работе на пониженных скоростях.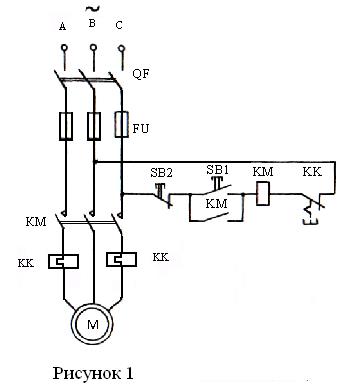 Этот способ нашел широкое применение например, в ЭП подъемно-транспортных машин и механизмов.
Этот способ нашел широкое применение например, в ЭП подъемно-транспортных машин и механизмов.
Расчет сопротивления добавочного резистора R 2д может быть выполнен несколькими способами в зависимости от формы задания требуемой искусственной механической характеристики.
Если искусственная характеристика определена полностью, то сопротивление добавочного резистора (например, R 2д1 ) можно определить по выражению :
, (8.30)
где – сопротивление фазы ротора АД.
Если искусственная характеристика задана своей рабочей частью, то можно использовать метод отрезков, для чего на рисунке 8.16 проведена вертикальная линия, соответствующая номинальному моменту М ном , и отмечены характерные точки: а, b, c, d, e. Сопротивление искомого резистора R 2д1 определяется как
R 2д1 = R 2ном аb/ас, (8.31)
где – номинальное сопротивление АД; – ЭДС ротора при S = 1; – номинальный ток ротора.
http://life-prog.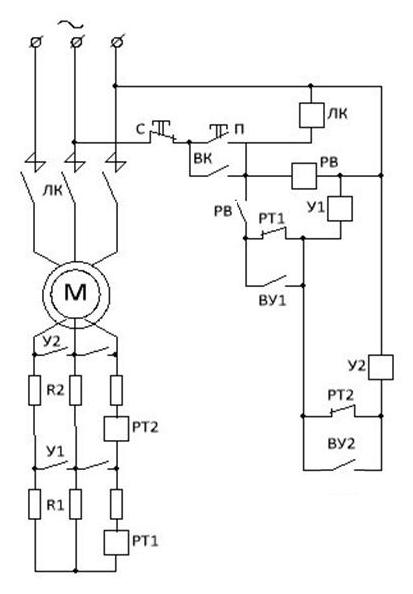 ru/1_17774_tormoznie-rezhimi-ad.html
ru/1_17774_tormoznie-rezhimi-ad.html
Для управления асинхронными электродвигателями используются релейно-контакторные аппараты, которые реализуют типовые схемы пуска, реверса, торможения, остановки электропривода.
На базе типовых схем релейно-контакторного управления разрабатываются схемы управления электроприводами производственных механизмов. Пуск асинхронных двигателей с короткозамкнутым ротором небольшой мощности осуществляется обычно при помощи магнитных пускателей. В данном случае магнитный пускатель состоит из контактора переменного тока, двух встроенных в него электротепловых реле.
Простейшая схема управления асинхронным электродвигателем с короткозамкнутым ротором. Схема использует питание силовых цепей и цепей управления от источника одного и того же напряжения (рис. 4.9). Для повышения надежности работы релейных контакторных аппаратов, большей частью рассчитанных на низкое напряжение, и для повышения безопасности эксплуатации применяются схемы с питанием цепей управления от источника пониженного напряжения.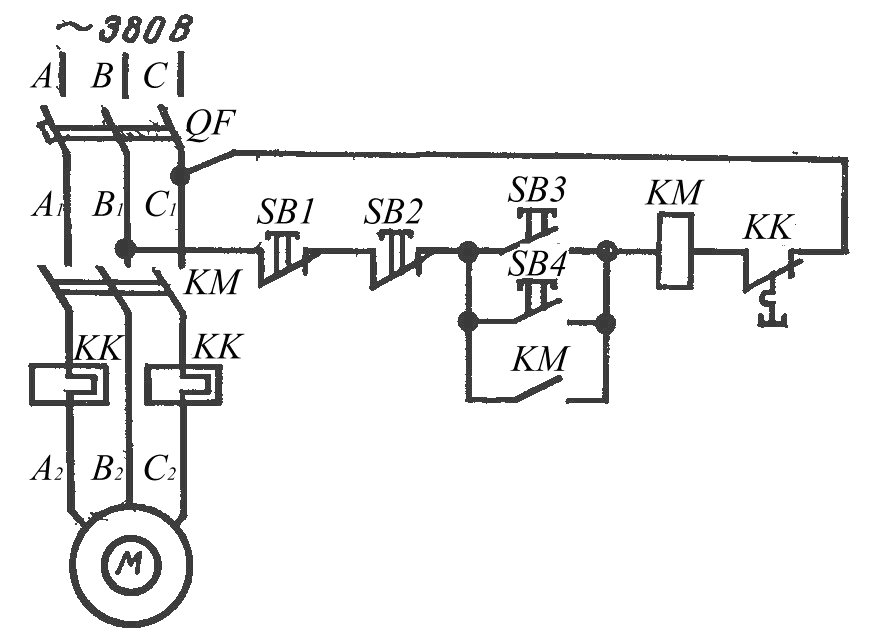
Если рубильник S1 включен, то для пуска электродвигателя необходимо нажать на кнопку S2 («пуск»). При этом катушка контактора K1M получит питание, замкнутся главные контакты К1(1-3)М в силовой цепи и статор двигателя присоединится к сети. Электродвигатель начнет вращаться. Одновременно в цепи управления закроется замыкающий вспомогательный контакт K1A, шунтирующий кнопку S2 («пуск»), после чего эту кнопку не нужно удерживать в нажатом состоянии, так как цепь катушки контактора KlM остается замкнутой. Кнопка S2 с самовозвратом и за счет действия пружины возвращается в исходное разомкнутое состояние.
Для отключения электродвигателя от сети нажимается кнопка S3 («стоп»). Катушка контактора K1M обесточивается и замыкающие контакты K1(1-3)M отключают обмотки статора от сети. Одновременно размыкается вспомогательный контакт K1A. Схема приходит в исходное, нормальное состояние. Вращение электродвигателя прекращается.
Схема предусматривает защиту двигателя и цепи управления от коротких замыканий плавкими предохранителями F 1(1-3), защиту от перегрузки двигателя двумя электротепловыми реле F2(1-2). Пружинный привод контактов магнитного пускателя К 1(1-3)М, K1A на размыкание реализует так называемую нулевую защиту, которая при исчезновении или значительном снижении напряжения отключают двигатель от сети. После восстановления нормального напряжения самопроизвольного пуска двигателя не произойдет.
Пружинный привод контактов магнитного пускателя К 1(1-3)М, K1A на размыкание реализует так называемую нулевую защиту, которая при исчезновении или значительном снижении напряжения отключают двигатель от сети. После восстановления нормального напряжения самопроизвольного пуска двигателя не произойдет.
Более четкая защита от снижения или исчезновения напряжения может быть выполнена при помощи реле пониженного напряжения, катушка которого присоединяется к двум фазам силовой цепи, а его замыкающий контакт включен последовательно с катушкой контактора. В этих схемах вместо установки на вводе рубильников с предохранителями применяют воздушные автоматы.
Схема управления асинхронным электродвигателем с коротко-замкнутым ротором с использованием магнитного пускателя и воздушного автоматического выключателя.
Автоматический выключатель F1 исключает возможность обрыва одной фазы от срабатывания защиты при однофазном коротком замыкании, как это бывает при установке предохранителей (рис. 4. 10). Нет необходимости заменять элементы в предохранителях при сгорании их плавкой вставки.
10). Нет необходимости заменять элементы в предохранителях при сгорании их плавкой вставки.
В схемах управления электродвигателями применяются автоматы с электромагнитными расцепителями либо с расцепителями электромагнитным и электротепловым. Расцепители электромагнитного типа характеризуются нерегулярной отсечкой, равной десятикратному току, и служат для защиты от токов короткого замыкания, Электротепловые расцепители обладают обратнозависимой характеристикой времени от тока. Так, расцепитель с номинальным током 50 А срабатывает при 1,5-кратной нагрузке через 1 ч, а при 4-кратной — через 20 с. Электротепловые расцепители не защищают двигатель от перегрева при перегрузках на 20 — 30%, но могут защитить двигатель и силовую цепь от перегрева пусковым током при застопоривании приводного механизма. Поэтому для защиты электродвигателей от длительных перегрузок при использовании автомата с электротепловым расцепителем такого типа применяются дополнительные электротепловые реле, как и при использовании автоматического выключателя с электромагнитным расцепителем.
 Многие выключатели, например АП-50, защищают электродвигатель одновременно от токов короткого замыкания и от перегрузок. Принципы действия схем (см. рис. 4.9, 4.10) для пуска и останова аналогичны. Эти схемы нашли широкое применение для управления нереверсивными электроприводами транспортеров, воздуходувок, вентиляторов, насосов, лесоперерабатывающих и заточных станков.
Многие выключатели, например АП-50, защищают электродвигатель одновременно от токов короткого замыкания и от перегрузок. Принципы действия схем (см. рис. 4.9, 4.10) для пуска и останова аналогичны. Эти схемы нашли широкое применение для управления нереверсивными электроприводами транспортеров, воздуходувок, вентиляторов, насосов, лесоперерабатывающих и заточных станков.Схемы управления асинхронным двигателем с короткозамкнутым ротором с реверсивным магнитным пускателем. Эта схема применяется в случаях, когда необходимо изменять направления вращения электропривода (рис. 4.11), например в приводе электролебедок, рольгангов, механизмов подачи станков и т.д. Управление двигателями осуществляется реверсивным магнитным пускателем. Включение двигателя для вращения «вперед» осуществляется нажатием кнопки S1. Катушка контактора K1M будет под напряжением, и замыкающие главные контакты К1(1-3)M присоединят электродвигатель к сети. Для переключения электродвигателя необходимо нажать на кнопку S3 («стоп»), а затем на кнопку S2 («назад»), что вызовет отключение контактора K1M и включение контактора К2М.
 При этом, как видно из схемы, две фазы на статоре переключатся, т.е. произойдет реверс вращения электродвигателя. Во избежание короткого замыкания в цепи статора между первой и третьей фазой вследствие ошибочного одновременного нажатия на обе пусковые кнопки S1 и S2 реверсивные магнитные пускатели имеют рычажную механическую блокировку (на схеме не показана), которая препятствует втягиванию одного контактора, если включен другой. Для повышения надежности кроме механической блокировки в схеме предусмотрена электрическая блокировка, которая осуществляется при помощи размыкающих вспомогательных контактов К1А.2 и К2А.2. Обычно реверсивный магнитный пускатель состоит из двух контакторов, заключенных в один корпус.
При этом, как видно из схемы, две фазы на статоре переключатся, т.е. произойдет реверс вращения электродвигателя. Во избежание короткого замыкания в цепи статора между первой и третьей фазой вследствие ошибочного одновременного нажатия на обе пусковые кнопки S1 и S2 реверсивные магнитные пускатели имеют рычажную механическую блокировку (на схеме не показана), которая препятствует втягиванию одного контактора, если включен другой. Для повышения надежности кроме механической блокировки в схеме предусмотрена электрическая блокировка, которая осуществляется при помощи размыкающих вспомогательных контактов К1А.2 и К2А.2. Обычно реверсивный магнитный пускатель состоит из двух контакторов, заключенных в один корпус.В практике применяется также схема реверса асинхронных короткозамкнутых электродвигателей с использованием двух отдельных нереверсивных магнитных пускателей. Ho для устранения возможности короткого замыкания между первой и третьей фазой силовой цепи от одновременного включения обоих пускателей применяют двухцепные кнопки. Например, при нажатии кнопки S1 («вперед») цепь катушки контакторов K1M замыкается, а цепь катушки К2М при этом дополнительно размыкается. (Принцип действия двухцепных кнопок показан на рис. 4.12.) Реверс электродвигателей постоянного тока осуществляется изменением полярности напряжения силовой цепи.
Например, при нажатии кнопки S1 («вперед») цепь катушки контакторов K1M замыкается, а цепь катушки К2М при этом дополнительно размыкается. (Принцип действия двухцепных кнопок показан на рис. 4.12.) Реверс электродвигателей постоянного тока осуществляется изменением полярности напряжения силовой цепи.
Схема управления двухскоростным асинхронным электродвигателем с короткозамкнутым ротором. Такая схема приведена на рис. 4.12. Привод может иметь две скорости. Пониженная скорость получается при соединении обмоток статора на треугольник, что осуществляется нажатием двухцепной кнопки S3 и включением контактора КЗ с замыканием трех силовых контактов К3. Одновременно замыкается вспомогательный контакт К3А, шунтирующий кнопку S3, и размыкается К3А — вспомогательный контакт в цепи катушки К4.
Повышенная скорость получается при соединении обмоток на двойную звезду, что реализуется нажатием двухцепной кнопки S4. При этом катушка контактора К3 обесточивается, контакты КЗ в силовой цепи размыкаются, размыкается вспомогательный контакт К3А, шунтирующий кнопку S3, и замыкается вспомогательный контакт К3А в цепи катушки К4.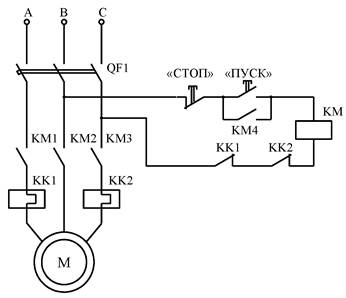
При дальнейшем нажатии (перемещении) кнопки S4 замыкается цепь катушки контактора К4, замыкаются пять контактов К4 в силовой цепи, обмотка статора будет подключена на двойную звезду. Одновременно замыкается вспомогательный контакт К4А, шунтирующий кнопку S4 и размыкается вспомогательный контакт К4А в цепи катушки контактора К3. Обычно контакторы переменного тока имеют три силовых контакта, в схеме подключения статора на двойную звезду показано пять силовых контактов К4. В этом случае параллельно катушке контактора К4 включается катушка дополнительного контактора.
После предварительного соединения обмоток статора производится пуск двигателя при помощи контакторов K1 и К2 для вращения вперед или назад. Включение контакторов K1 или К2 осуществляется соответственно нажатием кнопки S1 или S2. Применение двухцепных кнопок позволяет осуществить дополнительную электрическую блокировку, исключающую одновременное включение контакторов K1 и К2, а также К3 и К4.
В схеме предусмотрена возможность переключения с одной скорости на другую при вращении электродвигателя вперед или назад без нажатия кнопки S5 («стоп»). При нажатии кнопки S5 катушки включенных контакторов обесточиваются и схема приходит в исходное, нормальное состояние.
При нажатии кнопки S5 катушки включенных контакторов обесточиваются и схема приходит в исходное, нормальное состояние.
Рассмотренная схема является основой построения схем управления электродвигателями двухскоростных транспортеров подачи раскряжевочных агрегатов, сортировочных конвейеров и т.п.
Рассмотрим вопросы торможения электродвигателей. При отключении обмоток статора от сети ротор электродвигателя с рабочим механизмом, например дисковой пилой шпалорезного станка, продолжает сравнительно долгое время вращаться по инерции. Для устранения этого явления в приводах с асинхронными электродвигателями в зависимости от их мощности и назначения применяется торможение противовключением, фрикционное торможение и динамическое торможение.
Схема управления асинхронным электродвигателем с коротко-замкнутым ротором с использованием торможения противовключением.
Такая схема изображена на рис. 4.13. В схемах торможения противовключением используется реле контроля скорости (PKC) ЕМ, механически связанное с валом двигателя; его замыкающий контакт EA при определенной угловой скорости двигателя закрывается. При неподвижном роторе двигателя и скорости его вращения менее 10…15% от номинальной контакт реле EA разомкнут. Нажатием кнопки SI включается контактор K1M, замыкаются силовые контакты К1(1-3)M и двигатель пускается в ход, замыкается вспомогательный контакт K1A.1, шунтирующий кнопку S1. Размыкающий вспомогательный контакт А7А.2 одновременно разрывает цепь питания катушки контактора К2М, а несколько позднее с увеличением скорости вращения двигателя замыкается контакт реле скорости EA. Поэтому контактор К2М в этот период не включается.
При неподвижном роторе двигателя и скорости его вращения менее 10…15% от номинальной контакт реле EA разомкнут. Нажатием кнопки SI включается контактор K1M, замыкаются силовые контакты К1(1-3)M и двигатель пускается в ход, замыкается вспомогательный контакт K1A.1, шунтирующий кнопку S1. Размыкающий вспомогательный контакт А7А.2 одновременно разрывает цепь питания катушки контактора К2М, а несколько позднее с увеличением скорости вращения двигателя замыкается контакт реле скорости EA. Поэтому контактор К2М в этот период не включается.
Отключение электродвигателя от сети с торможением противовключением производится нажатием кнопки S2 («стоп»). При этом катушка контактора K1M обесточивается, размыкаются силовые контакты К1(1-3)М, размыкается шунтирующий пусковую кнопку S1 вспомогательный контакт K1A.1. Одновременно замыкается размыкающий вспомогательный контакт К1А.2. При этом двигатель вращается по инерции и контакт реле EA замкнут, следовательно, катушка контактора К2А получит питание, замкнутся главные контакты К2(1-3)М, разомкнется вспомогательный контакт К2А в цепи катушки K1M.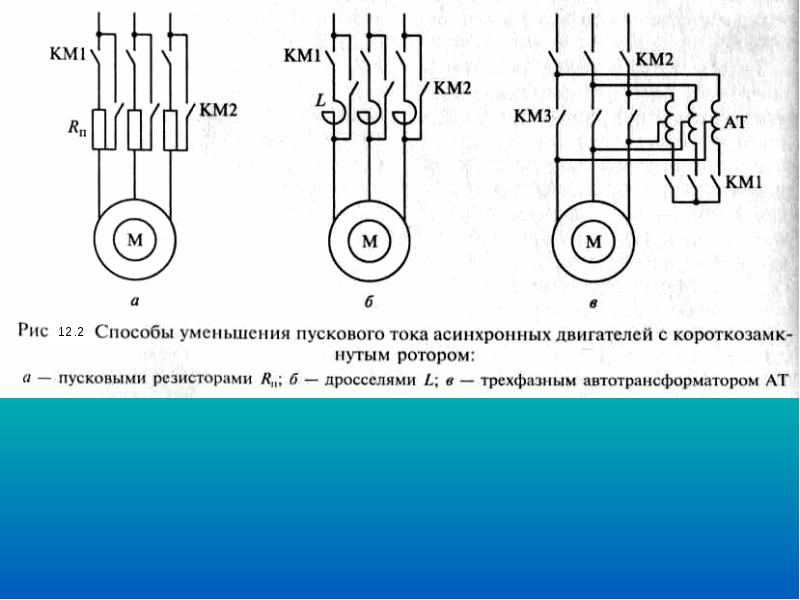 Обмотки статора будут подключены к сети на реверс вращения ротора. Ротор мгновенно затормаживается и при скорости вращения, близкой к нулю, контакт реле скорости EA размыкается, катушка контактора К2М обесточивается, главные контакты К2(1-3)М размыкаются, замыкается вспомогательный контакт К2А. Двигатель остановлен и отключен от сети. Схема будет в исходном положении.
Обмотки статора будут подключены к сети на реверс вращения ротора. Ротор мгновенно затормаживается и при скорости вращения, близкой к нулю, контакт реле скорости EA размыкается, катушка контактора К2М обесточивается, главные контакты К2(1-3)М размыкаются, замыкается вспомогательный контакт К2А. Двигатель остановлен и отключен от сети. Схема будет в исходном положении.
Рассмотренная типовая схема торможения противовключением является основой построения схем управления электродвигателями станков заточки цепных, круглых, рамных пил, схем обрезных станков и др. Торможение противовключением обеспечивает жесткий, мгновенный останов привода и применяется обычно для электродвигателей небольшой мощности.
Схема фрикционного торможения асинхронного электродвигателя грузоподъемного механизма. Такая схема представлена на рис. 4.14. В соответствии с правилами технической эксплуатации грузоподъемных механизмов в отключенном состоянии привод и механизм подъема должны быть надежно заторможены.
На упрощенной схеме условно показан односторонний колодочный тормоз Tс пружинным приводом зажима тормозного шкива.
При пуске электродвигателя нажимается кнопка S1 («пуск»), катушка контактора K1M будет под напряжением, замкнутся три контакта К1(1-3)М в силовой цепи и вспомогательный контакт K1A. Статор электродвигателя и обмотка электромагнита Y одновременно будут присоединены к сети. Электромагнит Y одновременно отведет колодочный тормоз от шкива и создаст деформацию пружины. Двигатель вращается расторможенным.
Нажатием кнопки S2 («стоп») обесточивается катушка контактора K1M, размыкаются главные контакты в силовой цепи К1(1-3)М и вспомогательный контакт K1A. Статор электродвигателя и обмотка электромагнита У отключаются от сети, колодочный тормоз с пружинным приводом жестко фиксирует ротор электродвигателя с механизмом подъема. Применение реверсивного магнитного пускателя дает возможность получить схему фрикционного торможения электропривода механизма и на подъем, и на опускание груза.
Схема фрикционного торможения асинхронного электродвигателя станочного оборудования. Такая схема показана на рис. 4.15. В нормальном (отключенном) состоянии ротор электродвигателя расторможен под действием пружинного привода. Это позволяет проводить смену инструмента, наладку станка с легким поворотом приводного вала и ротора электродвигателя.
Электродвигатель подключается к сети при помощи кнопки S1, контакта K1A и силовых контактов К1(1-3)М. Остановка электропривода станка производится нажатием двухцепной кнопки S2 («стоп»). При этом катушка контактора K1M обесточивается, размыкаются главные контакты в силовой цепи К1(1-3)М и вспомогательный контакт K1A. Электродвигатель отключается от сети, продолжая вращаться по инерции.
При дальнейшем нажатии на кнопку S2 замыкается цепь катушки контактора К2М, замыкаются контакты К2(1-2)М, электромагнит Y затягивает колодочный тормоз. Кнопка S2 освобождается и принимает исходное положение, контактор К2М обесточивается, контакты К2(1-2)М размыкаются.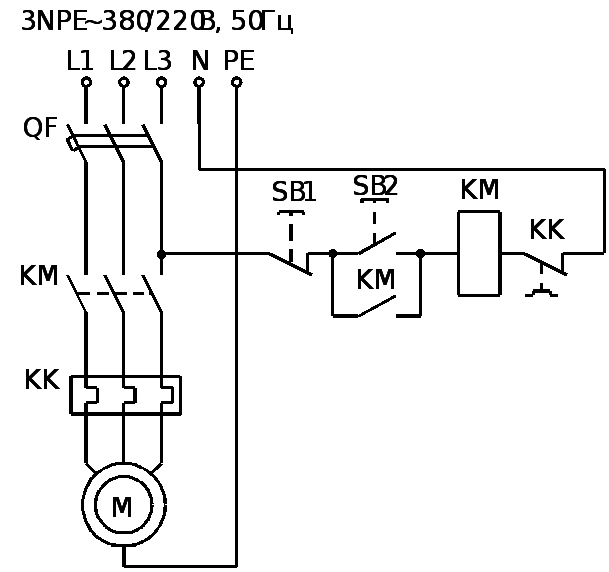 Статор двигателя и электромагнит отключены от сети, привод остановлен и расторможен. Эта простейшая схема является базой разработки схем фрикционного торможения электродвигателей станочного оборудования, в которых учитывается необходимость реверса, защитных ограждений, сигнализации.
Статор двигателя и электромагнит отключены от сети, привод остановлен и расторможен. Эта простейшая схема является базой разработки схем фрикционного торможения электродвигателей станочного оборудования, в которых учитывается необходимость реверса, защитных ограждений, сигнализации.
Схема управления асинхронным двигателем с использованием динамического торможения. Такая схема приведена на рис. 4.16. Динамическое торможение, в отличие от торможения противовключением и фрикционного метода, является плавным, мягким торможением. Включение электродвигателя в сеть осуществляется при нажатии кнопки SI («пуск»). Контактор K1M будет включен, замкнутся три главных контакта К1(1-3)М в силовой цепи, замкнется вспомогательный контакт K1А.1, разомкнется контакт К1А.2, замкнется контакт К1А.З, после чего включится реле времени Д1М и замкнет свой контакт РДТ в цепи катушки контактора К2М, которую несколько раньше разомкнул контакт К1А.2.
Отключение статора электродвигателя от сети переменного тока и торможение осуществляется нажатием кнопки S2 («стоп»). Контактор К1М теряет питание, главные контакты К1(1-3)М размыкаются, размыкаются вспомогательные контакты K1A.1, К1А.3, и замыкается контакт К1А.2. Катушка реле времени Д1M теряет питание, однако замыкающий контакт РДТ, будучи ранее замкнутым, разомкнется с выдержкой времени, которая несколько превышает длительность торможения двигателя. При замыкании контакта К1А.2 катушка контактора К2М получит питание, разомкнется вспомогательный контакт блокировки К2А и замкнутся контакты К2(1-2)М. В обмотку статора подается постоянный ток. Обмотка создает неподвижный в пространстве магнитный поток. Во вращающемся по инерции роторе индуцируются ЭДС.
Контактор К1М теряет питание, главные контакты К1(1-3)М размыкаются, размыкаются вспомогательные контакты K1A.1, К1А.3, и замыкается контакт К1А.2. Катушка реле времени Д1M теряет питание, однако замыкающий контакт РДТ, будучи ранее замкнутым, разомкнется с выдержкой времени, которая несколько превышает длительность торможения двигателя. При замыкании контакта К1А.2 катушка контактора К2М получит питание, разомкнется вспомогательный контакт блокировки К2А и замкнутся контакты К2(1-2)М. В обмотку статора подается постоянный ток. Обмотка создает неподвижный в пространстве магнитный поток. Во вращающемся по инерции роторе индуцируются ЭДС.
Взаимодействие токов ротора, вызванных этими ЭДС, с неподвижным магнитным потоком создает тормозной момент двигателя
где Mн — номинальный момент двигателя; nс — синхронная скорость двигателя; I»р — приведенный к статору ток ротора; R»р — полное активное сопротивление ротора, приведенное к статору; nд — относительная скорость двигателя, nд = n/nс.

После размыкания контакта реле времени РДТ схема приходит в исходное состояние, двигатель плавно останавливается. Для ограничения постоянного тока служит дополнительный резистор Rт. На базе этой схемы созданы схемы управления электродвигателями лесопильных рам, шпалорезных и других крупных круглопильных станков.
Схема тиристорного управления пуском и торможением асинхронного двигателя с короткозамкнутым ротором. Такая схема изображена на рис. 4.17. В типовой схеме разомкнутого управления асинхронным двигателем с короткозамкнутым ротором в качестве силовых элементов, включенных в статорную цепь двигателя, используются тиристоры в сочетании с релейно-контактными аппаратами в цепи управления. Тиристоры выполняют роль силовых коммутаторов и, кроме того, легко позволяют осуществлять необходимый темп изменения напряжения на статоре двигателя регулированием угла включения тиристоров.
При пуске плавное изменение угла включения тиристоров дает возможность изменять приложенное к статору напряжение от нуля до номинального, тем самым ограничивать токи и момент двигателя. Схема содержит устройство динамического торможения в виде демпфирующего контура. Применение шунтирующего тиристора, замыкающего цепь тока между двумя фазами, приводит к увеличению постоянной составляющей тока, что создает достаточный тормозной момент в области высокой угловой скорости.
Схема содержит устройство динамического торможения в виде демпфирующего контура. Применение шунтирующего тиристора, замыкающего цепь тока между двумя фазами, приводит к увеличению постоянной составляющей тока, что создает достаточный тормозной момент в области высокой угловой скорости.
Рассмотрим типовую схему комплектного устройства, состоящего в силовой части из группы включенных встречно-параллельно тиристоров VS1…VS4 в фазах А и С и одного короткозамкнутого тиристора между фазами А и В — V5 для управления асинхронным двигателем М. Схема включает блок управления тиристорами БУ и релейно-контактный узел управления.
Нажатием кнопки S1 включается реле K1M и К2М, на управляющие электроды тиристоров VS1…VS4 подаются импульсы, сдвинутые на 60° относительно питающего напряжения. К обмоткам статора двигателя подается пониженное напряжение, уменьшаются пусковой ток и пусковой момент. Ротор двигателя увеличивает скорость вращения, разгоняется. Размыкающий контакт реле К1.2 отключает реле К3M с задержкой времени, зависящей от параметров резистора R7 и конденсатора С4.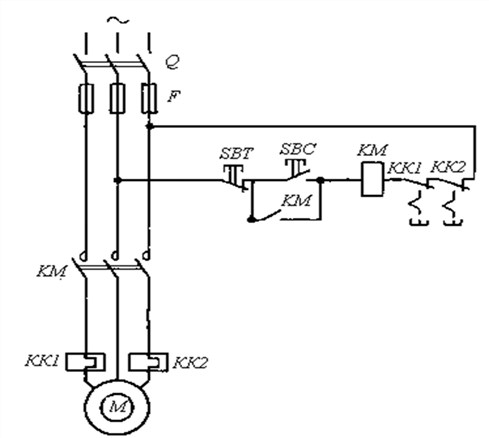 Размыкающими контактами реле К3М шунтируются соответствующие резисторы в блоке управления тиристорами БУ, и к статору прикладывается полное напряжение сети.
Размыкающими контактами реле К3М шунтируются соответствующие резисторы в блоке управления тиристорами БУ, и к статору прикладывается полное напряжение сети.
Для остановки двигателя нажимается кнопка S3, обесточивается релейная схема управления, тиристоры VS1…VS4 и напряжение со статора двигателя снимается. При этом за счет энергии, запасенной конденсатором С5, включается на время торможения реле К4М, которое своими контактами К4.2 и К4.3 включает тиристоры VS2 и VS5. По фазам А и В в обмотки статора двигателя протекает ток однополупериодного выпрямления, что обеспечивает эффективное динамическое торможение.
Сила тока, а следовательно, и время динамического торможения регулируются резисторами R1 и R3. Эта схема также имеет шаговый режим. При нажатии кнопки S2 включается реле K5M, которое своими контактами KS.3 и К5.4 включает тиристоры VS2 и VS5. В этом случае по фазам А и В в обмотки статора двигателя протекает ток однополупериодного выпрямления. При отпускании кнопки S2 выключается реле K5M и тиристоры VS2 и VS5; при этом на короткое время за счет энергии, запасенной в конденсаторе Сб, включается реле, которое своим контактом К6. 2 включает тиристор VS3, и ротор двигателя поворачивается на некоторый угол вследствие поворота примерно на такой же угол результирующего вектора потока статора.
2 включает тиристор VS3, и ротор двигателя поворачивается на некоторый угол вследствие поворота примерно на такой же угол результирующего вектора потока статора.
Шаг поворота зависит от напряжения сети, момента статической нагрузки, момента инерции привода и среднего значения выпрямленного тока. Реализация пошагового режима работы двигателя проводится после его остановки, так как реле К5М первоначально можно включить только после замыкания размыкающих контактов K1.5, К4.1. Шаговый режим работы двигателя создает благоприятные условия наладки.
Схема управления асинхронными электродвигателями с фазным ротором в функции времени. Такая схема представлена на рис. 4.18. Защита силовых цепей двигателя от токов короткого замыкания осуществляется с помощью реле максимального тока FI, F2, F3; защита от перегрузок — электротепловыми реле F4(1-2), нагревательные элементы которых включены через трансформаторы тока TT1, ТТ2. Цепи управления защищаются автоматическим выключателем F5, имеющим максимальную токовую защиту.
При включении рубильника SI и автоматического выключателя FS получит питание реле времени Д1М и замыкающие контакты его Д1А.1, Д1А.2 закроются, тем самым подготовится цепь включения реле времени Д2М и контактора K1M. Размыкающий контакт Д1А.3 разомкнется и выключит цепь катушек контакторов ускорения К2М, R3М, К4М.
При последующем нажатии кнопки S2 («пуск») через замкнувшийся ранее контакт Д1А.2 включится контактор K1M, замкнутся главные контакты К1(1-3) M в силовой цепи, в обмотку статора двигателя M будет подано напряжение. В обмотку ротора при этом включены все пусковые резисторы. Начинается пуск двигателя на первой реостатной характеристике. Одновременно закроется вспомогательный контакт K1A.3, шунтирующий пусковую кнопку, и замкнется контакт K1A.2, через который подается питание в цепь катушек реле времени Д2М, Д3М. Размыкающий вспомогательный контакт K1A.1 отключит цепь реле Д1М, которое отпускает якорь с выдержкой времени при отключении его катушки. Поэтому Д2М не сразу включится и его размыкающий контакт Д2А. 1 будет открыт.
1 будет открыт.
Следует отметить, что размыкающий контакт Д1А.З остается еще открытым; по истечении времени выдержки реле Д1М его замыкающий контакт Д1А.1 (а также Д1А.2) откроется, а размыкающий Д1А.З — закроется. В результате этих переключений в схеме управления включится контактор К2М и будет шунтирована первая пусковая ступень резистора — двигатель с первой реостатной характеристики перейдет на вторую, разогнавшись до большей угловой скорости. Кроме того, выключится реле времени Д2М и его размыкающий контакт с выдержкой времени Д2А.1 замкнет цепь катушки контактора К3М, который сработает и замкнет свои контакты К3(1-2)М, т.е. шунтируется вторая пусковая ступень резистора — двигатель переходит на третью реостатную характеристику.
Наконец, после размыкания с выдержкой времени замыкающего контакта Д2А.1 выключится реле Д3М — с выдержкой времени, на которое настроено реле Д3М (соответственно времени пуска двигателя на последней реостатной характеристике), замкнется его контакт Д3А.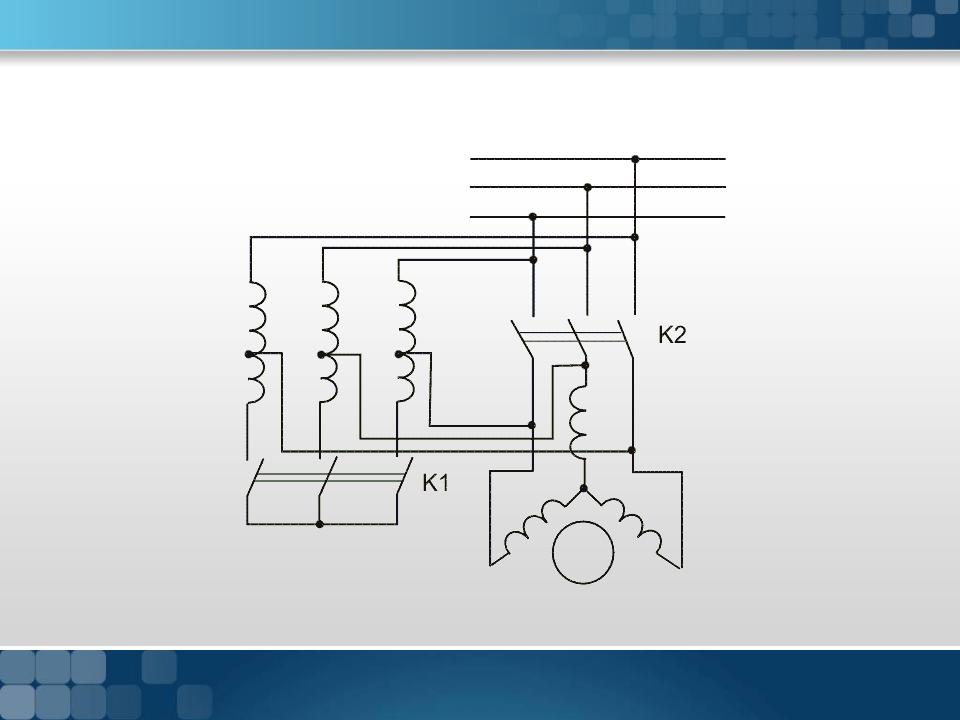 1, включится контактор К4М и замкнет свои контакты К4(1-3)М. Обмотка ротора будет замкнута накоротко и двигатель будет заканчивать свой разгон в соответствии с его естественной характеристикой. Этим и заканчивается ступенчатый пуск асинхронного двигателя, контролируемый в функции времени электромагнитными реле времени Д1М, Д2М, Д3М.
1, включится контактор К4М и замкнет свои контакты К4(1-3)М. Обмотка ротора будет замкнута накоротко и двигатель будет заканчивать свой разгон в соответствии с его естественной характеристикой. Этим и заканчивается ступенчатый пуск асинхронного двигателя, контролируемый в функции времени электромагнитными реле времени Д1М, Д2М, Д3М.
Останов двигателя производится нажатием кнопки S3. Схема используется для привода механизмов, не требующих реверса, длительность торможения которых после отключения двигателя не имеет существенного значения. В частности, на базе этой схемы создаются схемы управления главным электродвигателем лесопильных рам.
Для управления силовым электрооборудованием в электрических цепях используют разнообразные устройства дистанционного управления, защиты, телемеханики и автоматики, воздействующие на коммутационные аппараты его включения и отключения или регулирования.
На рис.5.4 приведена принципиальная схема управления асинхронным электродвигателем с короткозамкнутым ротором. Данная схема широко используется на практике при управлении приводами насосов, вентиляторов и многих других.
Данная схема широко используется на практике при управлении приводами насосов, вентиляторов и многих других.
Перед началом работы включают автоматический выключатель QF. При нажатии кнопки SВ2 включается пускатель КМ и запускается двигатель М. Для остановки двигателя необходимо нажать кнопку SВ1, при этом отключаются пускатель КМ и двигатель М.
Рис.5.4. Схема включения асинхронного электродвигателя с короткозамкнутым ротором
При перегрузке электродвигателя М срабатывает электротепловое реле КК, размыкающее контакты КК:1 в цепи катушки КМ. Пускатель КМ отключается, двигатель М останавливается.
В общем случае схемы управления могут осуществлять торможение электропривода, его реверсирование, изменять частоту вращения и т.д. В каждом конкретном случае используется своя схема управления.
В системах управления электроприводами широко используются блокировочные связи. Блокировкой обеспечивают фиксацию определенного состояния или положения рабочих органов устройства или элементов схемы. Блокировка обеспечивает надежность работы привода, безопасность обслуживания, необходимую последовательность включения или отключения отдельных механизмов, а также ограничение перемещения механизмов или исполнительных органов в пределах рабочей зоны.
Блокировка обеспечивает надежность работы привода, безопасность обслуживания, необходимую последовательность включения или отключения отдельных механизмов, а также ограничение перемещения механизмов или исполнительных органов в пределах рабочей зоны.
Различают механическую и электрическую блокировки.
Примером простейшей электрической блокировки, применяемой практически во всех схемах управления, является блокировка кнопки «Пуск» SB2 (рис. 5.4.) контактом КМ2. Блокировка этим контактом позволяет после включения двигателя кнопку SB2 отпустить, не прерывая цепи питания катушки магнитного пускателя КМ, которое идет через блокировочный контакт КМ2.
В схемах реверсирования электродвигателей (при обеспечении движения механизмов вперед-назад, вверх-вниз и т.д.), а также при торможении применяются реверсивные магнитные пускатели. Реверсивный магнитный пускатель состоит из двух нереверсивных. При работе реверсивного пускателя необходимо исключить возможность их одновременно включения. Для этого в схемах предусматриваются и электрическая, и механическая блокировки (рис. 5.5). Если реверсирование двигателя выполняется двумя нереверсивными магнитными пускателями, то роль электрической блокировки играют контакты КМ1:3 и КМ2:3, а механическая блокировка обеспечивается кнопками SВ2 и SВ3, каждая из которых состоит из двух контактов, связанных между собой механически. При этом один из контактов-замыкающий, другой — размыкающий (механическая блокировка).
Для этого в схемах предусматриваются и электрическая, и механическая блокировки (рис. 5.5). Если реверсирование двигателя выполняется двумя нереверсивными магнитными пускателями, то роль электрической блокировки играют контакты КМ1:3 и КМ2:3, а механическая блокировка обеспечивается кнопками SВ2 и SВ3, каждая из которых состоит из двух контактов, связанных между собой механически. При этом один из контактов-замыкающий, другой — размыкающий (механическая блокировка).
Схема работает следующим образом. Предположим что при включении пускателя КМ1 двигатель М вращается по часовой стрелке и против часовой — при включении КМ2. При нажатии кнопки SВ3 сначала размыкающий контакт кнопки разорвет цепь питания пускателя КМ2 и только потом замыкающий контакт SВ3 замкнет цепь катушки КМ1.
Рис.5.5. Механическая и электрическая блокировки при реверсировании привода
Пускатель КМ1 включается, запускается с вращением по часовой стрелке двигатель М. Контакт КМ1:3 размыкается, осуществляя электрическую блокировку, т. е. пока включен КМ1, цепь питания пускателя КМ2 разомкнута и его нельзя включить. Для осуществления реверса двигателя необходимо его остановить кнопкой SВ1, а затем, нажав кнопку SВ2, запустить в обратную сторону. При нажатии SВ2 сначала размыкающим контактом SВ2 разрывается цепь питания катушки КМ1 и далее замыкается цепь питания катушки КМ2 (механическая блокировка). Пускатель КМ2 включается и реверсирует двигатель М. Контакт КМ2:3, размыкаясь, осуществляет электрическую блокировку пускателя КМ1.
е. пока включен КМ1, цепь питания пускателя КМ2 разомкнута и его нельзя включить. Для осуществления реверса двигателя необходимо его остановить кнопкой SВ1, а затем, нажав кнопку SВ2, запустить в обратную сторону. При нажатии SВ2 сначала размыкающим контактом SВ2 разрывается цепь питания катушки КМ1 и далее замыкается цепь питания катушки КМ2 (механическая блокировка). Пускатель КМ2 включается и реверсирует двигатель М. Контакт КМ2:3, размыкаясь, осуществляет электрическую блокировку пускателя КМ1.
Чаще реверсирование двигателя выполняется одним реверсивным магнитным пускателем. Такой пускатель состоит из двух простых пускателей, подвижные части которых между собой связаны механически с помощью устройства в виде коромысла. Такое устройство называется механической блокировкой, не позволяющей силовым контактом одного пускателя КМ1 одновременно замыкаться силовым контактам другого пускателя КМ2 (рис. 5.6).
Рис. 5.6. Механическая блокировка «коромыслом» подвижных частей двух пускателей единого реверсивного магнитного пускателя
Электрическая схема управления реверсом двигателя при помощи двух простейших пускателей единого реверсивного магнитного пускателя такая же, как и электрическая схема управления реверсом двигателя с использованием двух нереверсивных магнитных пускателей (рис.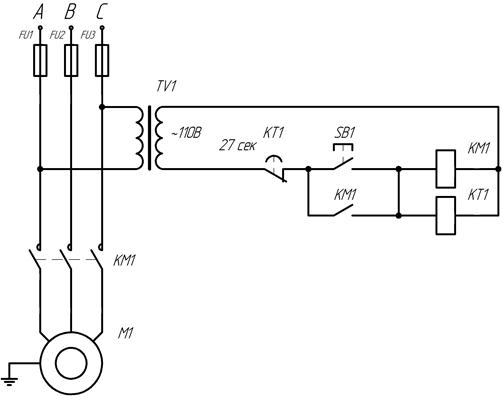 5.5), с применением в электрической схеме таких же электрических и механических блокировок.
5.5), с применением в электрической схеме таких же электрических и механических блокировок.
При автоматизации электроприводов поточных линий, конвейеров и т.п. применяется электрическая блокировка, которая обеспечивает пуск электродвигателей линии в определенной последовательности (рис. 5.7). При такой схеме, например, включение второго двигателя М2 (рис. 5.7) возможно только после включения первого двигателя М1, включение двигателя М3 – после включения М2. Такая очередность пуска обеспечивается блокировочными контактами КМ1:3 и КМ2:3.
Рис.5.7. Схема последовательного включения двигателей
Пример 5.1. Используя электрическую схему (рис. 5.4) управления асинхронным электродвигателем с короткозамкнутым ротором, необходимо включить в эту схему дополнительные контакты, обеспечивающие автоматическую остановку электродвигателя рабочего механизма в одной и в двух заданных точках.
Решение. Требование задачи обеспечить остановку электродвигателя в одной заданной точке может быть выполнено путевым выключателем SQ1 с нормально закрытым контактом, установленным последовательно с блок-контактом KM2, шунтирующим кнопку SB2. Для остановки электродвигателя рабочего механизма в двух заданных точках последовательно с контактом путевого выключателя SQ1 размещают контакт второго путевого выключателя SQ2. На рис. 5.8 приведены электрические схемы остановки электродвигателя в одной и в двух заданных точках. После пуска двигателя механизм приходит в движение и при достижении места остановки нажимает на путевой выключатель, например SQ1, и электродвигатель останавливается. После выполнения необходимой технологической операции вновь нажимаем на кнопку SB2, и механизм продолжает движение до следующего путевого выключателя SQ2, где технологическая операция заканчивается.
Для остановки электродвигателя рабочего механизма в двух заданных точках последовательно с контактом путевого выключателя SQ1 размещают контакт второго путевого выключателя SQ2. На рис. 5.8 приведены электрические схемы остановки электродвигателя в одной и в двух заданных точках. После пуска двигателя механизм приходит в движение и при достижении места остановки нажимает на путевой выключатель, например SQ1, и электродвигатель останавливается. После выполнения необходимой технологической операции вновь нажимаем на кнопку SB2, и механизм продолжает движение до следующего путевого выключателя SQ2, где технологическая операция заканчивается.
Рис. 5.8 К примеру 5.1
Пример 5.2. В электрическую схему (рис. 5.5) управления реверсом короткозамкнутого асинхронного двигателя с помощью блокировочных связей следует ввести элементы световой сигнализации для контроля направления вращения двигателя.
Решение. Схема световой сигнализации контроля направления вращения двигателя при реверсе, совмещённая со схемой управления реверсом двигателя, приведена на рис.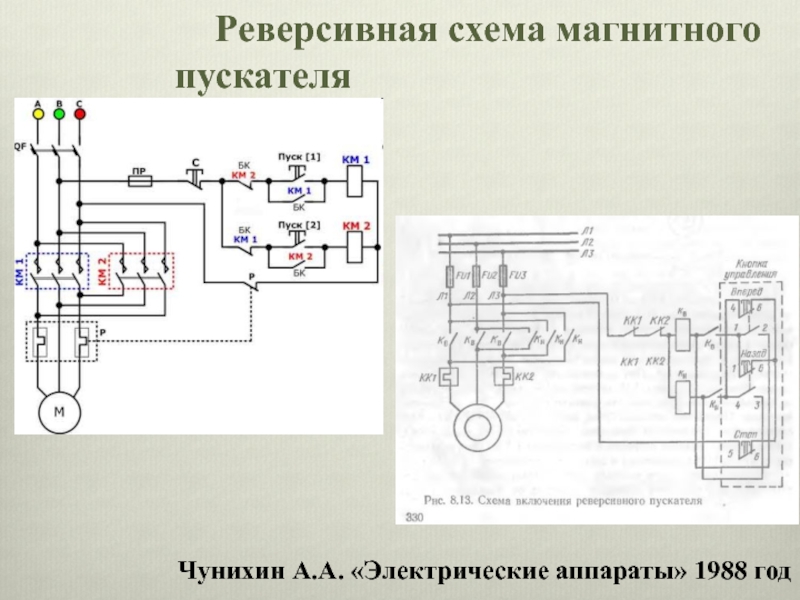 5.9. При вращении двигателя, например вправо, горит лампа HL1, включаемая контактом KM1.4 магнитного пускателя KM1, при этом лампа HL2 погашена, т.к. магнитный пускатель KM2 не включён. При вращении двигателя влево горит лампа HL2, включённая контактом KM2.4 магнитного пускателя KM2. Таким образом, лампа HL1 сигнализирует о вращении двигателя вправо, а лампа HL2 — о вращении двигателя влево. В результате блокировочными связями световая сигнализация обеспечивает контроль над направлением вращения двигателя при реверсе.
5.9. При вращении двигателя, например вправо, горит лампа HL1, включаемая контактом KM1.4 магнитного пускателя KM1, при этом лампа HL2 погашена, т.к. магнитный пускатель KM2 не включён. При вращении двигателя влево горит лампа HL2, включённая контактом KM2.4 магнитного пускателя KM2. Таким образом, лампа HL1 сигнализирует о вращении двигателя вправо, а лампа HL2 — о вращении двигателя влево. В результате блокировочными связями световая сигнализация обеспечивает контроль над направлением вращения двигателя при реверсе.
Рис. 5.9 К примеру 5.2
ВАЖНО! Перед подключением электродвигателя необходимо убедится в правильности в соответствии с его .
- Условные обозначения на схемах
(далее — пускатель) — коммутационный аппарат предназначенный для пуска и остановки двигателя. Управление пускателем осуществляется через электрическую катушку, которая выступает в качестве электромагнита, при подаче на катушку напряжения она воздействует электромагнитным полем на подвижные контакты пускателя которые замыкаются и включают электрическую цепь, и наоборот, при снятии напряжения с катушки пускателя — электромагнитное поле пропадает и контакты пускателя под действием пружины возвращаются в исходное положение размыкая цепь.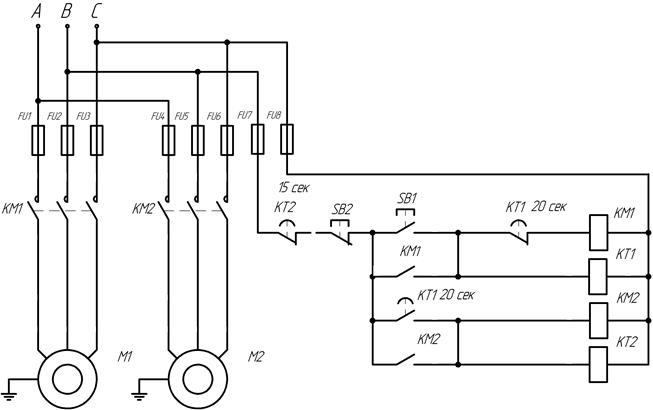
У магнитного пускателя есть силовые контакты предназначенные для коммутации цепей под нагрузкой и блок-контакты которые используются в цепях управления.
Контакты делятся на нормально-разомкнутые — контакты которые в своем нормальном положении, т.е. до подачи напряжения на катушку магнитного пускателя или до механического воздействия на них, находятся в разомкнутом состоянии и нормально-замкнутые — которые в своем нормальном положении находятся в замкнутом состоянии.
В новых магнитных пускателях имеется три силовых контакта и один нормально-разомкнутый блок-контакт. При необходимости наличия большего количества блок-контактов (например при сборке ), на магнитный пускатель сверху дополнительно устанавливается приставка с дополнительными блок-контактами (блок контактов) которая, как правило, имеет четыре дополнительных блок-контакта (к примеру два нармально-замкнутых и два нормально-разомкнутых).
Кнопки для управления электродвигателем входят в состав кнопочных постов, кнопочные посты могут быть однокнопочные, двухкнопочные, трехкнопочные и т.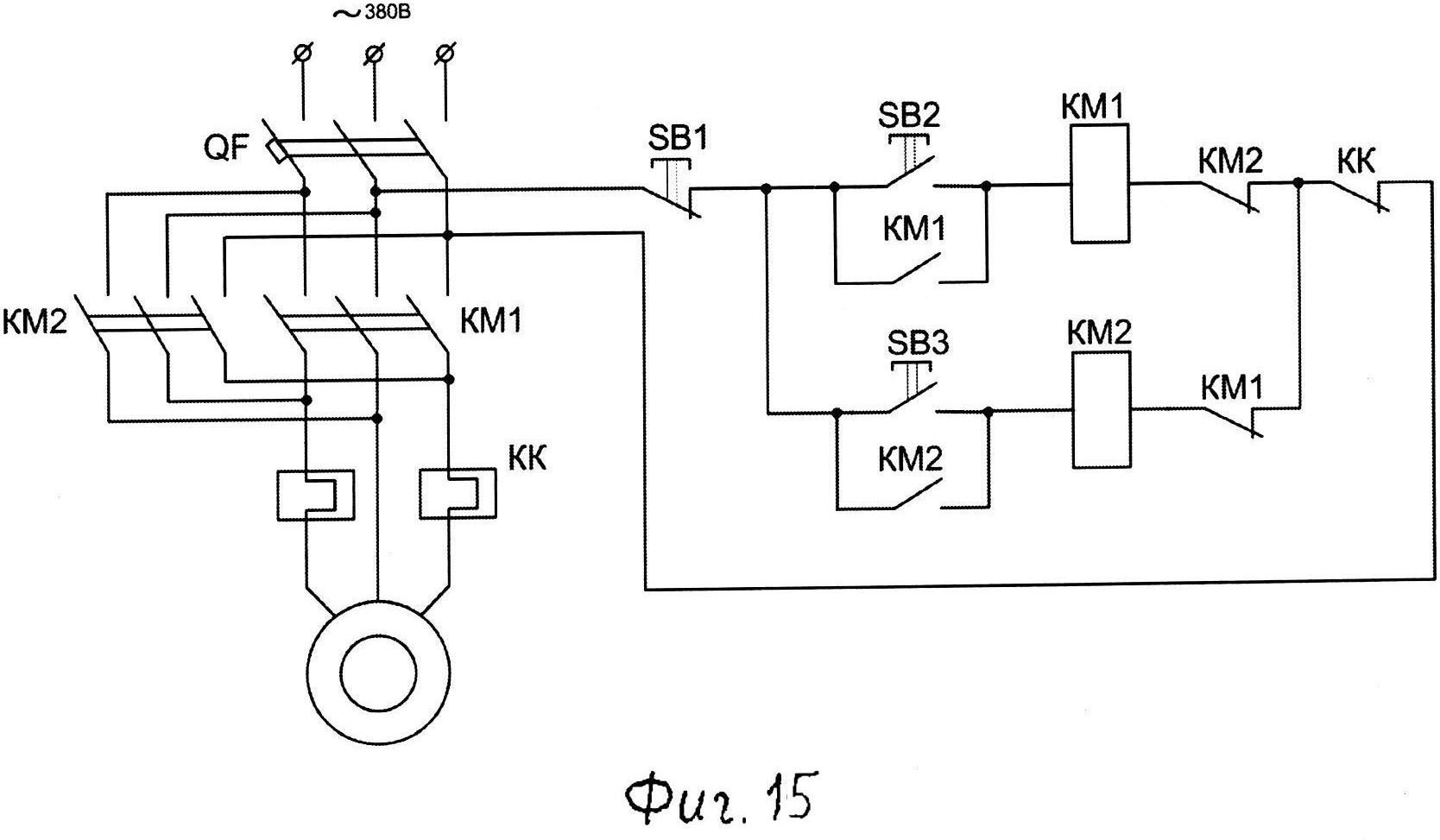 д.
д.
Каждая кнопка кнопочного поста имеет по два контакта — один из них нормально-разомкнутый, а второй нормально-замкнутый, т.е. каждая из кнопок может использоваться как в качестве кнопки «Пуск» так и в качестве кнопки «Стоп».
- Схема прямого включения электродвигателя
Данная схема является самой простой схемой подключения электродвигателя, в ней отсутствует цепь управления, а включение и отключение электродвигателя осуществляется автоматическим выключателем.
Главными достоинствами данной схемы является дешевизна и простота сборки, к недостаткам же данной схемы можно отнести то, что автоматические выключатели не предназначены для частого коммутирования цепей это, в сочетании с пусковыми токами, приводит к значительному сокращению срока службы автомата, кроме того в данной схеме отсутствует возможность устройства дополнительной защиты электродвигателя.
- Схема подключения электродвигателя через магнитный пускатель
Эту схему так же часто называют схемой простого пуска электродвигателя , в ней, в отличии от предыдущей, кроме силовой цепи появляется так же цепь управления.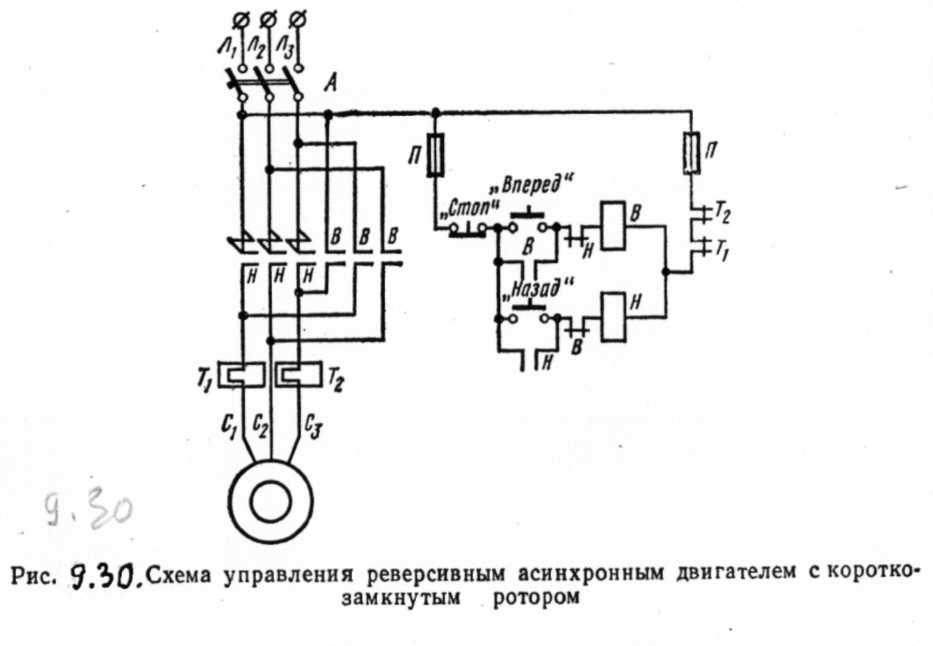
При нажатии кнопки SB-2 (кнопка «ПУСК») подается напряжение на катушку магнитного пускателя KM-1, при этом пускатель замыкает свои силовые контакты KM-1 запуская электродвигатель, а так же замыкает свой блок-контакт KM-1.1, при отпускании кнопки SB-2 ее контакт снова размыкается, однако катушка магнитного пускателя при этом не обесточивается, т.к. ее питание теперь будет осуществляться через блок-контак KM-1.1 (т.е. блок-контак KM-1.1 шунтирует кнопку SB-2). Нажатие на кнопку SB-1 (кнопка «СТОП») приводит к разрыву цепи управления, обесточиванию катушки магнитного пускателя, что приводит к размыканию контактов магнитного пускателя и как следствие, к остановке электродвигателя.
- Реверсивная схема подключения электродвигателя (Как изменить направление вращения электродвигателя?)
Что бы поменять направление вращения трехфазного электродвигателя необходимо поменять местами любые две питающие его фазы:
При необходимости частой смены направления вращения электродвигателя применяется :
В данной схеме применяется два магнитных пускателя (KM-1, KM-2) и трехкнопочный пост, магнитные поскатели применяемые в данной схеме кроме нормально-разомкнутого блок-контакта должны так же иметь и нормально замкнутый контакт.
При нажатии кнопки SB-2 (кнопка «ПУСК 1») подается напряжение на катушку магнитного пускателя KM-1, при этом пускатель замыкает свои силовые контакты KM-1 запуская электродвигатель, а так же замыкает свой блок-контакт KM-1.1 который шунтирует кнопку SB-2 и размыкает свой блок-контакт KM-1.2 который защищает электродвигатель от включения в обратную сторону (при нажатии кнопки SB-3) до его предварительной остановки, т.к. попытка запуска электродвигателя в обратную сторону без предварительного отключения пускателя KM-1 приведет к короткому замыканию. Что бы запустить электродвигатель в обратную сторону необходимо нажать кнопу «СТОП» (SB-1), а затем кнопку «ПУСК 2» (SB-3) которая запитает катушку магнитного пускателя KM-2 и запустит электродвигатель в обратную сторону.
10Особенности пуска асинхронных электродвигателей | RuAut
На сегодняшний день асинхронные электродвигатели являются самыми распространёнными потребителями электроэнергии в мире и используются повсеместно, начиная от бытовых устройств, таких как пылесос, холодильник или вентилятор и заканчивая крупными промышленными установки, в которых мощность электродвигателей измеряется в мегаваттах. Это насосные станции, конвейеры, горнодобывающие установки, системы вентиляции или дымоудаления и т.д. Согласно статистики в мире используется около 300 миллионов трехфазных асинхронных электродвигателей с напряжением 380В.
Это насосные станции, конвейеры, горнодобывающие установки, системы вентиляции или дымоудаления и т.д. Согласно статистики в мире используется около 300 миллионов трехфазных асинхронных электродвигателей с напряжением 380В.
Ежегодно около 10% из этих электродвигателей выходят из строя из-за неправильной эксплуатации, перегрузок или аварийных режимов работы. Часто выход из строя связано с процессом пуска асинхронного электродвигателя, когда он должен набрать номинальную скорость вращения в механизмах с большим моментом инерции. Соответственно момент пуска для асинхронного электродвигателя является тяжелым режимом работы с большой механической и электрической нагрузкой. Пусковые токи асинхронного электродвигателя могут превышать номинальные в 10 – 12 раз.
Виды пуска электродвигателей и их особенности
Прямой пуск асинхронного электродвигателя – это наиболее традиционный способ пуска, который используется с момента появления электродвигателей и до настоящего времени.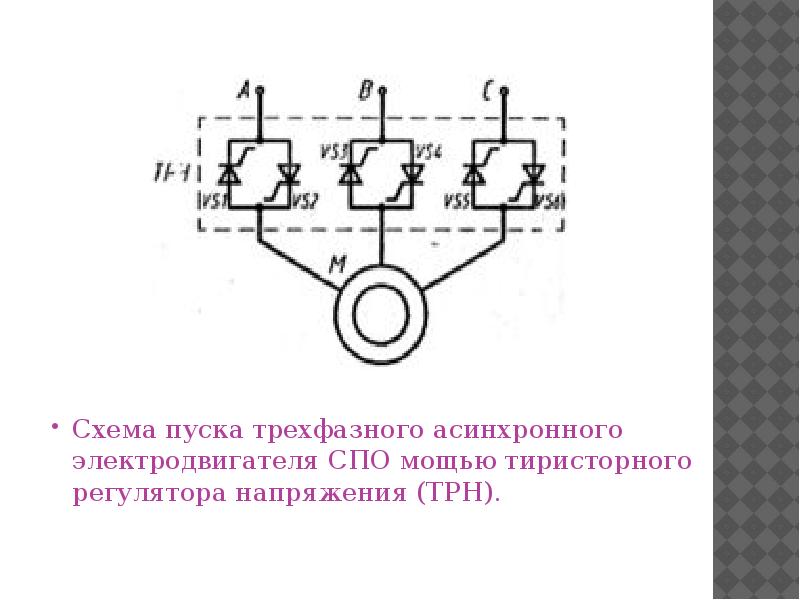 Это наиболее технически просто реализуемое и экономически выгодное решение, позволяющее запустить электродвигатель при номинальном напряжении. При таком способе пуска используется минимальный набор коммутационного оборудования, однако в настоящее время он в основном применяется для пуска электродвигателей небольших мощностей в связи с определенным количеством недостатков, который можно разделить на 2 категории: электрические и механические.
Это наиболее технически просто реализуемое и экономически выгодное решение, позволяющее запустить электродвигатель при номинальном напряжении. При таком способе пуска используется минимальный набор коммутационного оборудования, однако в настоящее время он в основном применяется для пуска электродвигателей небольших мощностей в связи с определенным количеством недостатков, который можно разделить на 2 категории: электрические и механические.
Электрические проблемы:
При прямом пуске асинхронного электродвигателя происходит довольно большой бросок тока, который приводит к падению напряжения в питающей сети. А также может привести к срабатыванию защиты, особенно в случаях, когда не применяется специальные аппараты для защиты электродвигателя. Кроме того, в случае затяжного пуска, длительное протекание тока превышающего номинальный в 6 -8 раз оказывает значительное тепловое и электродинамическое воздействие как на кабель подключенный к электродвигателю, так и на обмотки асинхронного электродвигателя, что приводит к их повышенному износу.
Механические проблемы:
Высокий начальный пусковой момент может привести к значительному толчку и, следовательно, к существенной нагрузке на механизмы электропривода, такие как ремни или крепления узла подшипника. Это вызывает их сокращение срока службы или полный выход из строя. В случае особо ответственных производств простои оборудования в течение времени пока будет производиться ремонт могут привести к значительным убыткам. При останове, как и при пуске, возникают сильные механические вибрации, вызванные переходными процессами. Они не позволяют осуществить синхронную работу нескольких независимых узлов в сложных станках линиях или установках.
Пуск по схеме звезда-треугольник, также является одним из известных способов пуска асинхронных электродвигателей. Этот метод используется для снижения механических нагрузок и ограничения пускового тока. Но и у него есть несколько недостатков. Во-первых, электродвигатель обязательно должен иметь 6 клемм для подключения питания. Во-вторых, для пуска по данной схеме необходимы 3 контактора, что опять же увеличивает стоимость и габариты установки. При переключении со схемы звезда на схему треугольник все равно происходит, пусть и кратковременный, но большой по амплитуде бросок тока. В-третьих, требуется использование двух кабелей от пункта управления до электродвигателя, что в случае длинных линий достаточно дорого. И последний недостаток заключается в том, что останов электродвигателя при подобной схеме подключения точно такой же как и при прямом пуске.
Третий способ пуска – использование устройств плавного пуска.
Устройство плавного пуска – это механическое, электронное или электромеханическое устройство, используемое для плавного пуска или останова электродвигателей. Благодаря применению устройства плавного пуска можно одновременно обеспечить плавный разгон и останов асинхронного электродвигателя, добиться улучшения стабильности электрических сетей, то есть уменьшить броски тока при пуске и значительно уменьшить просадки напряжения в сети при тяжелом пуске. Кроме того, использование систем плавного пуска минимизируют механические перегрузки оборудования при пуске и останове, уменьшает износ механизмов и тем самым увеличивает срок службы асинхронных электродвигателей, редукторов, муфт и других деталей привода. Поэтому самым оптимальным решением по соотношению функционал – стоимость для пуска асинхронных электродвигателей, в случае если нет необходимости постоянного регулирования скорости, являются устройства плавного пуска.
Прочитайте о принципе действия и преимуществах устройств плавного пуска (УПП)
Прямой пуск — асинхронный двигатель
Прямой пуск — асинхронный двигатель
Cтраница 1
Прямой пуск асинхронного двигателя широко применяют в технике. Недостатками его являются большой пусковой ток и сравнительно небольшой пусковой момент. [1]
Рассматривается прямой пуск асинхронного двигателя 4А 100 / 4 3 КЗ при номинальной частоте и амплитуде питающего напряжения в режиме холостого хода при номинальном моменте инерция. [2]
Наиболее простым является прямой пуск асинхронных двигателей с короткозамкнутым ротором. На рис. 261 показана схема прямого пуска асинхронного короткозамкнутого двигателя. [4]
Наиболее простым является прямой пуск асинхронных двигателей с короткозамкнутым ротором. [6]
Эти реле позволяют производить прямой пуск асинхронного двигателя. [7]
Тем не менее, прямой пуск асинхронных двигателей благодаря простоте и хорошим технико-экономическим показателям асинхронных двигателей с коротко-замкнутым ротором находит широкое применение. [8]
В том случае, когда прямой пуск асинхронного двигателя с короткозамкнутым ротором не может быть осуществлен и неприемлемым является пуск с ограничивающим сопротивлением, приходится использовать асинхронные двигатели с контактными кольцами, которые обеспечивают плавный пуск механизма при малых толчках тока в сети. [9]
На рис. 175 показана схема прямого пуска асинхронного двигателя с короткозамкнутым ротором. Питание силовых цепей двигателя ( левая часть схемы) и питание цепей управления ( правая часть схемы) осуществляются от одного и того же источника электрического тока. Существует и схема с раздельным питанием цепей. Статор сразу подключается непосредственно к сети. [10]
Ротор не вращается ( обычно при прямом пуске асинхронных двигателей пусковой момент достаточен для того, чтобы ротор двигателя начал вращаться) — двигатель надо немедленно отключить от питающей электросети; проверить правильность соединения обмотки статора; если схема соединения выполнена правильно, то надо проверить, не зажат ли вал двигателя, а в уплотнении — вал приводимого механизма; одновременно проверить давление ротора на вкладыш, так как давление на один из вкладышей не допускается, это может привести к повышению температуры вкладыша и его повреждению. [11]
Задача 3.10. Составить схему управления, которая обеспечивает прямой пуск асинхронного двигателя с короткозамкнутым ротором и его торможение противовключением в функции времени. [13]
Естественно, что столь неблагоприятные характеристики, соответствующие прямому пуску асинхронных двигателей, обусловили поиск решений по реализации управляемого пуска, которые, как показали исследования, наилучшим образом осуществляются при использовании тиристорных преобразователей напряжения. [15]
Страницы: 1 2
Пуск асинхронного двигателя | Электротехника
Пусковые свойства двигателей.
При пуске ротор двигателя, преодолевая момент нагрузки и момент инерции, разгоняется от частоты вращения п = 0 до п . Скольжение при этом меняется от sп = 1 до s. При пуске должны выполняться два основных требования: вращающий момент должен бить больше момента сопротивления (Мвр>Мс) и пусковой ток Iп должен быть по возможности небольшим.
В зависимости от конструкции ротора (короткозамкнутый или фазный), мощности двигателя, характера нагрузки возможны различные способы пуска: прямой пуск, пуск с использованием дополнительных сопротивлений, пуск при пониженном напряжении и др. Ниже различные способы пуска рассматриваются более подробно.
Прямой пуск.
Пуск двигателя непосредственным включением на напряжение сети обмотки статора называется прямым пуском. Схема прямого пуска приведена на рис. 3.22. При включении рубильника в первый момент скольжение s = l, а приведенный ток в роторе и равный ему ток статора
, (3.37)
максимальны (см.п.3.19 при s=1). По мере разгона ротора скольжение уменьшается и поэтому в конце пуска ток значительно меньше, чем в первый момент. В серийных двигателях при прямом пуске кратность пускового тока kI = IП / I1НОМ = ( 5,…,7), причем большее значение относится к двигателям большей мощности.
Рис. 3.22
Значение пускового момента находится из (3.23) при s = 1:
,(3.38)
Из рис. 3.18 видно, что пусковой момент близок к номинальному и значительно меньше критического. Для серийных двигателей кратность пускового момента МП/ МНОМ = (1.0,…,1.8).
Приведенные данные показывают, что при прямом пуске в сети, питающей двигатель, возникает бросок тока, который может вызвать настолько значительное падение напряжение, что другие двигатели, питающиеся от этой сети, могут остановиться.
С другой стороны, из-за небольшого пускового момента при пуске под нагрузкой двигатель может не преодолеть момент сопротивления на валу и не тронется с места. В силу указанных недостатков прямой пуск можно применять только у двигателей малой и средней мощности (примерно до 50 кВт).
Пуск двигателей с улучшенными пусковыми свойствами.
Улучшение пусковых свойств асинхронных двигателей достигается использованием эффекта вытеснения тока в роторе за счет специальной конструкции беличьей клетки. Эффект вытеснения тока состоит в следующем: потокосцепление и индуктивное сопротивление X2 проводников в пазу ротора тем выше, чем ближе ко дну паза они расположены (рис.3.23). Также X2 прямо пропорционально частоте тока ротора.
Следовательно, при пуске двигателя, когда s=1 и f2 = f1 = 50 Гц , индуктивное сопротивление X2 = max и под влиянием этого ток вытесняется в наружный слой паза. Плотность тока j по координате h распределяется по кривой, показанной на рис.3.24. В результате ток в основном проходит по наружному сечению проводника, т.е. по значительно меньшему сечению стержня, и, следовательно, активное сопротивление обмотки ротора R2 намного больше, чем при нормальной работе. За счет этого уменьшается пусковой ток и увеличивается пусковой момент МП (см. (3.37), (3.38) ).
По мере разгона двигателя скольжение и частота тока ротора падает и к концу пуска достигает 1 – 4 Гц. При такой частоте индуктивное сопротивление мало и ток распределяется равномерно по всему сечению проводника. При сильно выраженном эффекте вытеснения тока становится возможным прямой пуск при меньших бросках тока и больших пусковых моментах.
К двигателям с улучшенными пусковыми свойствами относятся двигатели, имеющие роторы с глубоким пазом, с двойной беличьей клеткой и некоторые другие.
Рис.3.23 Рис. 3.24
Двигатели с глубокими пазами.
Как показано на рис.3.25, паз ротора выполнен в виде узкой щели, глубина которой примерно в 10 раз больше, чем ее ширина. В эти пазы-щели укладывается обмотка в виде узких медных полос. Распределение магнитного потока показывает, что индуктивность и индуктивное сопротивление в нижней части проводника значительно больше, чем в верхней части.
Рис.3.25
Поэтому при пуске ток вытесняется в верхнюю часть стержня и активное сопротивление значительно увеличивается. По мере разгона двигателя скольжение уменьшается, и плотность тока по сечению становится почти одинаковой.
В целях увеличения эффекта вытеснения тока глубокие пазы выполняются не только в виде щели, но и трапецеидальной формы. В этом случае глубина паза несколько меньше, чем при прямоугольной форме.
Двигатели с двойной клеткой.
В таких двигателях обмотки ротора выполняются в виде двух клеток (рис.3.26): во внешних пазах 1 размещается обмотка из латунных проводников, во внутренних 2 – обмотка из медных проводников.
Рис.3.26
Таким образом, внешняя обмотка имеет большее активное сопротивление, чем внутренняя. При пуске внешняя обмотка сцепляется с очень слабым магнитным потоком, а внутренняя – сравнительно сильным полем. В результате ток вытесняется во внешнюю клетку, а во внутренней тока почти нет.
По мере разгона двигателя ток из внешней клетки переходит во внутреннюю и при s =sНОМ протекает в основном по внутренней клетке. Ток во внешней клетке при этом сравнительно небольшой.
Результирующий пусковой момент, складывающийся из моментов от двух клеток, значительно больше, чем у двигателей нормальной конструкции, и несколько больше, чем у двигателей с глубоким пазом. Однако следует иметь в виду, что стоимость двигателей с двойной клеткой ротора выше.
Пуск переключением обмотки статора.
Если при нормальной работе двигателя фазы статора соединены в треугольник, то, как показано на рис.3.27, при пуске первоначально они соединяются в звезду.
Рис.3.27
Для этого сначала включается выключатель Q, а затем переключатель S ставится в нижнее положение Пуск. В таком положении концы фаз Х, Y, Z соединены между собой, т.е. фазы соединены звездой. При этом напряжение на фазе в √3 раз меньше линейного.
В результате линейный ток при пуске в 3 раза меньше, чем при соединении треугольником. При разгоне ротора в конце пуска переключатель S переводится в верхнее положение и, как видно из рис. 3.27, фазы статора пересоединяются в треугольник.
Недостатком этого способа является то, что пусковой момент также уменьшается в 3 раза, так как момент пропорционален квадрату фазного напряжения, которое в √3 раз меньше при соединении фаз звездой. Поэтому такой способ применим при небольшом нагрузочном моменте и только для двигателей, нормально работающих при соединении обмоток статора в треугольник.
Пуск при включении добавочных резисторов в цепь статора.(рис. 3.28)
Рис.3.28
Перед пуском выключатель (пускатель) находится в разомкнутом состоянии и замыкается выключатель Q1.
При этом в цепь статора включены добавочные резисторы RДОБ. В результате обмотка статора питается пониженным напряжением U1n = U1НОМ – InRДОБ. После разгона двигателя замыкается выключатель Q2 и обмотка статора включается на номинальное напряжение U1НОМ. Подбором RДОБ можно ограничить пусковой ток до допустимого.
Следует иметь в виду, что момент при пуске, пропорциональный U21П, будет меньше и составляет (U1П / U1НОМ)2 номинального. Важно отметить, что при этом способе пуска значительны потери в сопротивлении RДОБ (RДОБI21n). Можно вместо резисторов RДОБ включить катушки с индуктивным сопротивлением ХДОБ, близким к RДОБ.
Применение катушек позволяет уменьшить потери в пусковом сопротивлении.
Автотрансформаторный пуск.
Кроме указанных способов можно применить так называемый автотрансформаторный пуск.
Соответствующая схема показана на рис.3.29.
Рис.3.29
Перед пуском переключатель S устанавливается в положение 1, а затем включается автотрансформатор и статор питается пониженным напряжением U1П. Двигатель разгоняется при пониженном напряжении и в конце разгона переключатель S переводится в положение 2 и статор питается номинальным напряжением U1ном.
Если коэффициент трансформации понижающего трансформатора n, тогда ток I на его входе будет в n раз меньше. Кроме того, пусковой ток будет также в n раз меньше, т.е. ток при пуске в сети будет в n2 раз меньше, чем при непосредственном пуске.
Этот способ, хотя и лучше рассмотренных в п.3.14.7, но значительно дороже.
Пуск двигателя с фазным ротором.
Пуск двигателя с фазным ротором осуществляется путем включения пускового реостата в цепь ротора, как это показано на рис.3.30.
Начала фаз обмоток ротора присоединяются к контактным кольцам и через щетки подключаются к пусковому реостату с сопротивлением Rp.
Приведенное к обмотке статора сопротивление пускового реостата Rp рассчитывается так, чтобы пусковой момент был максимальный, т.е. равен критическому. Так как при пуске скольжение sП = 1, то sП = 1 = sК , равенство МП = М Пmaх = МК будет обеспечено. Тогда
.
Пуск двигателя происходит по кривой, показанной на рис.3.31. В момент пуска рабочая точка на механической характеристике находится в положении а, а при разгоне двигателя она перемещается по кривой 1, соответствующей полностью включенному реостату.
При моменте, соответствующем точке е , включается первая ступень реостата и момент скачком увеличивается до точки b – рабочая точка двигателя переходит на кривую 2; в момент времени, соответствующей точке d, выключается вторая ступень реостата, рабочая точка скачком переходит в точку с и двигатель выходит на естественную характеристику 3 и затем в точку f. Реостат закорачивается, обмотка ротора замыкается накоротко, а щетки отводятся от колец.
Таким образом, фазный ротор позволяет пускать в ход асинхронные двигатели большой мощности при ограниченном пусковом токе. Однако этот способ пуска связан со значительными потерями в пусковом реостате.
Кроме того, двигатель с фазным ротором дороже двигателя с короткозамкнутым ротором. Поэтому двигатель с фазным ротором применяется лишь при больших мощностях и высоких требованиях к приводу.
Схемы пуска и торможения двигателя
В
настоящее время наиболее распространены трехфазные асинхронные двигатели
с
короткозамкнутым ротором. Пуск и остановка таких двигателей при
включении на полное напряжение сети осуществляются дистанционно при
помощи магнитных пускателей. Электрический
двигатель питается от трехфазной сети переменного напряжения.
Трехфазный автоматический выключатель предназначен для отключения
схемы при коротком замыкании. Однофазный автоматический выключатель
защищает цепи управления. Основным элементом магнитного пускателя является контактор …
В настоящее время наиболее распространены трехфазные асинхронные двигатели с короткозамкнутым ротором. Пуск и остановка таких двигателей при включении на полное напряжение сети осуществляются дистанционно при помощи магнитных пускателей.
Наиболее часто используется схема с одним пускателем и кнопками управления «Пуск» и «Стоп». Для того, чтобы обеспечить вращение вала двигателя в обе стороны используется схема с двумя пускателями (или с реверсивным пускателем) и тремя кнопками. Такая схема позволяет менять направление вращения вала двигателя «на ходу» без его предварительной остановки.
Схемы пуска двигателя
Электрический двигатель М питается от трехфазной сети переменного напряжения. Трехфазный автоматический выключатель QF предназначен для отключения схемы при коротком замыкании. Однофазный автоматический выключатель SF защищает цепи управления.
Основным элементом магнитного пускателя является контактор (мощное реле для коммутации больших токов) КМ. Его силовые контакты коммутируют три фазы, подходящие к электродвигателю. Кнопка SB1 («Пуск») предназначена для пуска двигателя, а кнопка SB2 («Стоп») — для остановки. Тепловые биметаллические реле KK1 и КК2 осуществляют отключение схемы при превышении тока, потребляемого электродвигателем.
Рис. 1. Схема пуска трехфазного асинхронного двигателя с помощью магнитного пускателя
При нажатии кнопки SB1 контактор КМ срабатывает и контактами KM.1, КМ.2, КМ.3 подключает электродвигатель к сети, а контактом КМ.4 блокирует кнопку (самоблокировка).
Для остановки электродвигателя достаточно нажать кнопку SB2, при этом контактор КМ отпускает и отключает электродвигатель.
Важным свойством магнитного пускателя является то, что при случайном пропадании напряжения в сети двигатель отключается, но восстановление напряжения в сети не приводит к самопроизвольному запуску двигателя, так как при отключении напряжения отпускает контактор КМ, и для повторного включения необходимо нажать кнопку SB1.
При неисправности установки, например, при заклинивании и остановке ротора двигателя, ток, потребляемый двигателем, возрастает в несколько раз, что приводит к срабатыванию тепловых реле, размыканию контактов KK1, КК2 и отключению установки. Возврат контактов КК в замкнутое состояние производится вручную после устранения неисправности.
Реверсивный магнитный пускатель позволяет не только запускать и останавливать электрический двигатель, но изменять направление вращения ротора. Для этого схема пускателя (рис. 2) содержит два комплекта контакторов и кнопок пуска.
Рис. 2. Схема пуска двигателя с помощью реверсивного магнитного пускателя
Контактор КМ1 и кнопка SB1 с самоблокировкой предназначены для включения двигателя в режиме «вперед», а контактор КМ2 и кнопка SB2 включают режим «назад». Для изменения направления вращения ротора трехфазного двигателя достаточно поменять местами любые две из трех фаз питающего напряжения, что и обеспечивается основными контактами контакторов.
Кнопка SB3 предназначена для остановки двигателя, контакты КМ 1.5 и КМ2.5 осуществляют взаимоблокировку, а тепловые реле КК1 и КК2 — защиту при превышении тока.
Включение двигателя на полное напряжение сети сопровождается большими пусковыми токами, что может быть недопустимо для сети ограниченной мощности.
Схема пуска электродвигателя с ограничением пускового тока (рис. 3) содержит резисторы R1, R2, R3, включенные последовательно с обмотками электродвигателя. Эти резисторы ограничивают ток в момент пуска при срабатывании контактора КМ после нажатия кнопки SB1. Одновременно с КМ при замыкании контакта КМ.5 срабатывает реле времени КТ.
Выдержка, осуществляемая реле времени, должна быть достаточной для разгона электродвигателя. По окончании времени выдержки замыкается контакт КТ, срабатывает реле К и своими контактами K.1, К.2, К.3 шунтирует пусковые резисторы. Процесс пуска завершен, на двигатель подается полное напряжение.
Рис. 3. Схема пуска двигателя с ограничением пускового тока
Далее будут рассмотрены две наиболее популярных схемы торможения трехфазных асинхронных двигателей с короткозамкнутым ротором: схема динамического торможения и схема торможения противовключением.
Схемы торможения двигателя
После снятия напряжения с двигателя его ротор какое-то время продолжает вращаться за счет инерции. В ряде устройств, например, в подъемно-транспортных механизмах, требуется осуществлять принудительное торможение для уменьшения величины выбега. Динамическое торможение заключается в том, что после снятия переменного напряжения через обмотки электродвигателя пропускается постоянный ток.
Схема динамического торможения показана на рис. 4.
Рис. 4. Схема динамического торможения двигателя
В схеме, помимо основного контактора КМ, присутствует реле К, включающее режим торможения. Поскольку реле и контактор не могут быть включены одновременно, применена схема взаимоблокировки (контакты КМ.5 и К.3).
При нажатии кнопки SB1 срабатывает контактор КМ, подает питание на двигатель (контакты КМ.1 КМ.2, КМ.3), блокирует кнопку (КМ.4) и блокирует реле К (КМ.5). Замыкание КМ.6 вызывает срабатывание реле времени КТ и замыкание контакта КТ без выдержки времени. Таким образом осуществляется пуск двигателя.
Для остановки двигателя следует нажать кнопку SB2. Контактор КМ отпускает, размыкаются контакты KM.1 — KM.3, отключая двигатель, замыкает контакт КМ.5, что вызывает срабатывание реле К. Контакты K.1 и К.2 замыкаются, подавая постоянный ток в обмотки. Происходит быстрое торможение.
При размыкании контакта КМ.6 реле времени КТ отпускает, начинается выдержка времени. Величина выдержки должна быть достаточна для полной остановки электродвигателя. По окончании выдержки времени контакт КТ размыкается, реле К отпускает и снимает постоянное напряжение с обмоток электродвигателя.
Наиболее эффективным способом торможения является реверсирование двигателя, когда сразу после снятия питания на электродвигатель подается напряжение, вызывающее появление встречного вращающего момента. Схема торможения противовключением приведена на рис. 5.
Рис. 5. Схема торможения двигателя противовключением
Частота вращения ротора двигателя контролируется с помощью реле частоты вращения с контактом SR. Если частота вращения больше некоторого значения, контакт SR замкнут. При остановке двигателя контакт SR размыкается. Кроме контактора прямого включения KM1 схема содержит контактор для реверсирования КМ2.
При пуске двигателя срабатывает контактор KM1 и контактом КМ 1.5 разрывает цепь катушки КМ2. С достижением определенной частоты вращения замыкается контакт SR подготавливая цепь для включения реверса.
При останове двигателя контактор KM1 отпускает и замыкает контакт КМ1.5. В результате этого контактор КМ2 срабатывает и подает на электродвигатель реверсирующее напряжение для торможения. Снижение частоты вращения ротора вызывает размыкание SR, контактор КМ2 отпускает, торможение прекращается.
10.12.2016 Без рубрики
Система запуска асинхронного двигателя — способы запуска двигателя
Новая гостевая статья А.Н. abotu системы пуска двигателей. Если какие-либо замечания или вопросы приветствуются, напишите комментарий ниже.Асинхронные двигатели находят широкое применение. Они используются в промышленных процессах, коммерческих зданиях, зонах отдыха, дома и в других областях.
Однако, если двигатель включается непосредственно от сети, он потребляет очень высокий начальный ток.Ток при запуске обычно в пять-семь раз больше того, что двигатель обычно потребляет при полной нагрузке, но развивает крутящий момент только в 1,5–2,5 раза по сравнению с крутящим моментом при полной нагрузке.
Большой пусковой ток приводит к огромным перепадам напряжения в линии питания, что может вызвать нестабильность в линии и повлиять на оборудование, подключенное к той же цепи.
Таким образом, прямой пуск двигателей не рекомендуется, вместо этого рекомендуется использовать подходящую схему или метод пуска, который минимизирует начальный ток.Этого можно достичь, запустив двигатель при более низком напряжении, чем обычно, и затем увеличив напряжение, как только двигатель запустится и наберет соответствующую скорость.
Способы пуска двигателя
Использование устройства прямого пуска
Пускатель прямого включения (DOL) сочетает в себе запуск и защиту двигателя; он состоит из контактора и защитного устройства, такого как автоматический выключатель.
В цепи стартера есть контактор с катушкой. Этой катушкой можно управлять, нажимая кнопки пуска или останова в зависимости от требуемой операции.Нажатие кнопки пуска активирует контакт, заставляя его замкнуть три фазы и подать питание на двигатель.
Устройство прямого пуска прямого включения | изображение: moeller.es
Нажатие кнопки останова обесточит контактор, отключив питание двигателя и заставив его остановиться. Однако он страдает от больших пусковых токов, возникающих, когда на двигатель подается полное сетевое напряжение.
Пускатели DOL ограничены двигателями мощностью менее 10 кВт. Двигатели большего размера могут вызвать чрезмерное падение напряжения из-за большого пускового тока.Кроме того, DOL подвергает двигатель чрезмерному нагреву, что сокращает срок его службы.
Пуск автотрансформатора
В этом методе используется автотрансформатор и двухпозиционный переключатель, который приводится в действие вручную или автоматически с помощью таймера. Любая операция изменяет положение переключателя с исходного положения на рабочее.
Когда переключатель находится в исходном положении, часть сетевого напряжения снимается с автотрансформатора. Автотрансформатор подает на двигатель от 50 до 70 процентов нормального напряжения.
При пониженном пусковом напряжении двигатель потребляет меньше тока. Например, при 50% -ном ответвлении автотрансформатора двигатель потребляет половину своего номинального тока или около 25% от того, что двигатель потреблял бы с пускателем прямого включения.
Метод пускателя автотрансформатора громоздок и дорог и обычно используется для более крупных промышленных применений.
Стартер звезда-треугольник
В двигателе используется как звезда, так и треугольник, управляемая переключателем. Двигатель запускается в пусковой конфигурации, после чего переключается на работу по схеме «треугольник».
Конфигурация пускателя электродвигателя со звезды на треугольник | изображение: bhs4.com
Двигатель запускается при соединении обмоток ротора по схеме звезды. Двигатель потребляет меньший ток, чем в схеме «треугольник» — обычно в три раза меньше, чем при схеме «треугольник». Однако соединение звездой развивает только половину крутящего момента по сравнению с соединением треугольником.
В методе пуска со звезды на треугольник используется двухпозиционный автоматический или ручной переключатель и реле времени. Это позволяет запустить двигатель по схеме звезды, которая имеет низкий пусковой ток, а затем переключиться на конфигурацию треугольником после того, как двигатель достигнет необходимой скорости.
Метод более сложен, чем DOL, и может не обеспечивать достаточный крутящий момент для полной нагрузки при запуске; как таковой, он обычно используется для запуска двигателей с начальной небольшой нагрузкой.
Стартер сопротивления ротора
В методе используются внешние резисторы, изначально включенные последовательно с обмоткой ротора для каждой фазы. Резисторы, которые обычно представляют собой проволочные обмотки, снижают некоторое количество напряжения, ограничивая ток, протекающий в обмотку ротора. После запуска двигателя резисторы постепенно удаляются из цепи, и питание подключается непосредственно к электросети.
Пуск двигателя с электронным управлением
Плавный старт
Плавный пуск, метод использует активные переключающие устройства, такие как тиристоры, для управления способом подачи энергии на двигатель. В трехфазных двигателях метод применим как в линейном, так и в треугольном режимах конфигурации.
Метод предоставляет средства управления напряжением двигателя и пусковым током, что позволяет плавно, без скачков, увеличивать крутящий момент двигателя. Это снижает провалы напряжения, нагрузки и износ механических частей.
Преобразователь частоты
Это метод с электронным управлением, позволяющий плавно запускать асинхронные двигатели. Он использует электронные схемы инвертора для управления частотой и током питания двигателя, тем самым предотвращая высокие пусковые токи. Плавный запуск предотвращает резкое повреждение механических частей системы. Это лучший способ, но и самый дорогой.
Пуск двигателя с частотным преобразователем | изображение: moeller.es
Стоимость приобретения и установки выше из-за дополнительных требований, таких как фильтры радиопомех, ЭМС, экранированные кабели двигателя, проблемы совместимости и т. Д.
Однако в эксплуатации есть больше экономических преимуществ. Это включает в себя плавный пуск, энергоэффективность, снижение износа механических частей, оптимизацию процесса и т. Д. Другие преимущества включают стабильность скорости при изменении нагрузки и общий более длительный срок службы двигателя.
Сравнение общих методов запуска двигателя
Сравнение некоторых распространенных методов запуска двигателей | изображение: moeller.es
Заключение
Из-за конструкции асинхронных двигателей в обмотках возникает короткое замыкание при запуске, и двигатель может потреблять большой ток из сети, что сопровождается большими падениями напряжения.Это может привести к нестабильности и повлиять на другое оборудование, питаемое от той же линии.
Существуют различные методы, которые можно использовать для запуска двигателей при более низких токах, а затем увеличения подачи до нормального значения после запуска двигателя. Выбор метода зависит от размера и применения двигателя.
A.N
Что вы думаете об этой статье «Назад к основам»? Пожалуйста, оставьте комментарий в области ниже.
Способы пуска трехфазных асинхронных двигателей
Асинхронный двигатель похож на многофазный трансформатор, вторичная обмотка которого короткозамкнута.Таким образом, при нормальном напряжении питания, как в трансформаторах, начальный ток, потребляемый первичной обмоткой, на короткое время очень велик. В отличие от двигателей постоянного тока большой ток при пуске связан с отсутствием обратной ЭДС. Если асинхронный двигатель напрямую включается от источника питания, он потребляет в 5-7 раз больше тока полной нагрузки и развивает крутящий момент, который всего в 1,5-2,5 раза превышает крутящий момент полной нагрузки. Этот большой пусковой ток вызывает большое падение напряжения в линии, что может повлиять на работу других устройств, подключенных к той же линии.Следовательно, не рекомендуется запускать асинхронные двигатели более высоких мощностей (обычно выше 25 кВт) непосредственно от сети.Ниже описаны различные способы пуска асинхронных двигателей .
Пускатели прямого включения (DOL)
Небольшие трехфазные асинхронные двигатели можно запускать непосредственно от сети, что означает, что номинальное питание подается непосредственно на двигатель. Но, как упоминалось выше, здесь пусковой ток будет очень большим, обычно в 5-7 раз больше номинального тока.Пусковой крутящий момент, вероятно, будет в 1,5–2,5 раза больше крутящего момента при полной нагрузке. Асинхронные двигатели могут быть запущены непосредственно в сети с помощью пускателя DOL, который обычно состоит из контактора и устройства защиты двигателя, такого как автоматический выключатель. Пускатель DOL состоит из контактора с катушкой, которым можно управлять с помощью кнопок пуска и останова. Когда нажимается кнопка запуска, контактор включается и замыкает все три фазы двигателя на фазы питания одновременно. Кнопка останова обесточивает контактор и отключает все три фазы, чтобы остановить двигатель.Чтобы избежать чрезмерного падения напряжения в линии питания из-за большого пускового тока, для двигателей мощностью менее 5 кВт обычно используется пускатель прямого включения.
Пуск двигателей с короткозамкнутым ротором
Пусковой пусковой ток в двигателях с короткозамкнутым ротором регулируется путем подачи пониженного напряжения на статор. Эти методы иногда называют методами пониженного напряжения для запуска асинхронных двигателей с короткозамкнутым ротором . Для этого используются следующие методы:- С использованием первичных резисторов
- Автотрансформатор
- Выключатели звезда-треугольник
1.Использование первичных резисторов:
Очевидно, что первичные резисторы предназначены для понижения напряжения и подачи пониженного напряжения на статор. Учтите, пусковое напряжение снижено на 50%. Тогда по закону Ома (V = I / Z) пусковой ток также будет уменьшен на такой же процент. Из уравнения крутящего момента трехфазного асинхронного двигателя, пусковой крутящий момент приблизительно пропорционален квадрату приложенного напряжения. Это означает, что если приложенное напряжение составляет 50% от номинального значения, пусковой крутящий момент будет только 25% от его нормального значения напряжения.Этот метод обычно используется для плавного пуска малых асинхронных двигателей . Не рекомендуется использовать метод пуска с резисторами первичной обмотки для двигателей с высокими требованиями к пусковому моменту.Резисторы обычно выбираются так, чтобы на двигатель можно было подавать 70% номинального напряжения. Во время пуска полное сопротивление последовательно соединено с обмоткой статора и постепенно уменьшается по мере увеличения скорости двигателя. Когда двигатель достигает соответствующей скорости, сопротивления отключаются от цепи, и фазы статора подключаются непосредственно к линиям питания.
2. Автотрансформаторы:
Автотрансформаторы также известны как автостартеры. Их можно использовать как для двигателей с короткозамкнутым ротором, так и с соединением звездой или треугольником. По сути, это трехфазный понижающий трансформатор с различными ответвлениями, которые позволяют пользователю запускать двигатель, скажем, при 50%, 65% или 80% сетевого напряжения. При пуске автотрансформатора ток, потребляемый из линии питания, всегда меньше тока двигателя на величину, равную коэффициенту трансформации. Например, когда двигатель запускается с ответвлением 65%, приложенное к двигателю напряжение будет 65% от линейного напряжения, а приложенный ток будет 65% от начального значения линейного напряжения, а линейный ток будет 65. % от 65% (т.е. 42%) от начального значения сетевого напряжения. Эта разница между линейным током и током двигателя связана с действием трансформатора. Внутренние соединения автозапуска показаны на рисунке. При запуске переключатель находится в положении «пуск», и на статор подается пониженное напряжение (которое выбирается с помощью ответвителя). Когда двигатель набирает подходящую скорость, скажем, до 80% от его номинальной скорости, автотрансформатор автоматически отключается от цепи, когда переключатель переходит в положение «работа».Переключатель, изменяющий соединение из положения пуска в положение пуска, может быть типа воздушного прерывателя (маленькие двигатели) или масляного (большие двигатели). Также предусмотрены условия для обесточивания и перегрузки с цепями выдержки времени на автостартере.
3. Пускатель звезда-треугольник:
Этот метод используется в двигателях, которые предназначены для работы на статоре, соединенном треугольником. Двухпозиционный переключатель используется для соединения обмотки статора по схеме звезды при пуске и по схеме треугольника при работе с нормальной скоростью. Когда обмотка статора соединена звездой, напряжение на каждой фазе двигателя будет уменьшено в 1 / (кв.3) для обмотки, соединенной треугольником. Пусковой крутящий момент будет в 1/3 раза больше, чем для обмотки, соединенной треугольником. Следовательно, пускатель со звезды на треугольник эквивалентен автотрансформатору с соотношением 1 / (квадрат 3) или уменьшенным на 58% напряжением.Пуск электродвигателей с фазным ротором
Электродвигатели с контактным кольцом запускаются с полным линейным напряжением, так как внешнее сопротивление может быть легко добавлено в цепь ротора с помощью контактных колец. Реостат, соединенный звездой, соединен последовательно с ротором через контактные кольца, как показано на рис.Введение сопротивления в ток ротора уменьшит пусковой ток в роторе (и, следовательно, в статоре). Кроме того, улучшается коэффициент мощности и увеличивается крутящий момент. Подключенный реостат может быть ручным или автоматическим.Поскольку введение дополнительного сопротивления в ротор улучшает пусковой момент, электродвигатели с фазным ротором могут запускаться под нагрузкой.
Вводимое внешнее сопротивление предназначено только для запуска и постепенно отключается по мере увеличения скорости двигателя.
Пуск асинхронного двигателя — методы пуска
Трехфазный асинхронный двигатель Самозапускающийся .Когда источник питания подключен к статору трехфазного асинхронного двигателя, создается вращающееся магнитное поле, ротор начинает вращаться и запускается асинхронный двигатель. Во время пуска скольжение двигателя составляет единицы , а пусковой ток очень велик.
Назначение стартера — не просто запустить двигатель, но он выполняет две основные функции. Это следующие:
- Для уменьшения сильного пускового тока,
- Для защиты от перегрузки и пониженного напряжения.
Трехфазный асинхронный двигатель можно запустить, подключив двигатель напрямую к полному напряжению источника питания. Двигатель также можно запустить, подав на двигатель пониженное напряжение. Крутящий момент асинхронного двигателя пропорционален квадрату приложенного напряжения. Таким образом, двигатель создает больший крутящий момент, когда он запускается при полном напряжении, чем когда он запускается при пониженном напряжении.
Существует три основных метода запуска асинхронного двигателя с сепаратором .Это следующие:
Устройство прямого пуска
Метод прямого пуска асинхронного двигателя от сети прост и экономичен. В этом методе пускатель подключается непосредственно к питающему напряжению. Таким способом запускаются малые двигатели мощностью до 5 кВт, чтобы избежать колебаний напряжения питания.
Пускатель звезда-треугольник
Метод пуска трехфазных асинхронных двигателей звезда-треугольник очень распространен и широко используется среди всех методов.В этом методе двигатель работает с обмотками статора, соединенными треугольником.
Пускатель автотрансформаторный
Автотрансформатор используется в обоих типах соединений, то есть при соединении звездой или треугольником. Автотрансформатор используется для ограничения пускового тока асинхронного двигателя.
Вышеуказанные три пускателя используются для асинхронного двигателя с ротором с сепаратором.
Метод пускового устройства асинхронного двигателя с контактным кольцом
В пускателе асинхронного двигателя с контактным кольцом полное напряжение питания подается на пускатель.Схема подключения асинхронного двигателя пускателя с контактным кольцом показана ниже:
Подключено полное пусковое сопротивление, что снижает ток питания статора. Ротор начинает вращаться, и сопротивление ротора постепенно снижается по мере увеличения скорости двигателя. Когда двигатель работает с номинальной частотой вращения при полной нагрузке, пусковые сопротивления полностью отключаются, а контактные кольца замыкаются накоротко.
Конструкция и работа цепи прямого пуска в режиме онлайн
Устройство прямого пуска в режиме онлайн или DOL — это простая электромеханическая система, предназначенная для переключения и защиты асинхронных двигателей.
Все мы знаем, что двигатели ужасно потребляют электроэнергию, и это высокое энергопотребление является результатом тока, потребляемого обмоткой двигателя. Таким образом, чем выше ток, потребляемый двигателем, тем выше будет потребляемая им мощность и выше будет выделяемое тепло. Это тепло обычно рассеивается в окружающую среду за счет излучения или прямой контактной проводимости. Но в некоторых случаях, когда нет надлежащей вентиляции или окружающая среда жаркая, обмотка якоря может загореться из-за чрезмерного нагрева.
Таким образом, необходимо внимательно следить за током в обмотке двигателя, чтобы избежать протекания большого тока в течение длительного времени. Таким образом, чтобы избежать протекания больших токов в течение длительного времени, двигатели обычно снабжены системами защиты различных типов.
Обычно эти системы защиты требуются для трехфазных промышленных двигателей, которые приводят в действие нагрузки большой мощности. А устройство прямого пуска в режиме онлайн — это механизм, который обеспечивает защиту от перегрузки для трехфазных асинхронных двигателей с короткозамкнутым ротором.
Основные функции, обеспечиваемые устройством прямого пуска для трехфазного асинхронного двигателя:
- Защита от сверхтока или короткого замыкания.
- Защита от перегрузки.
- Изолированная установка переключения двигателя.
Защита от перегрузки по току или защита от короткого замыкания: стартер DOL состоит из автоматического выключателя (MCCB) и предохранителя для отключения двигателя от источника питания в случае короткого замыкания.
Защита от перегрузки: стартер DOL состоит из электромеханической установки, которая отключает двигатель от источника питания, если двигатель перегружен или если двигатель потребляет ток, превышающий номинальное значение.
Изолированная схема переключения двигателя: Поскольку двигатели большой мощности представляют опасность, пускатели прямого включения спроектированы таким образом, чтобы заказчик мог косвенно включать и выключать двигатель.
Три упомянутые выше особенности важны для асинхронных двигателей малой и средней мощности, используемых в промышленности. Таким образом, стартеры DOL популярны и широко используются.
Прямой онлайн-пускатель в рабочем состоянииВо избежание путаницы разберем оригинальный стартер ДОЛ и обсудим каждый его раздел.
Внутренняя структура Direct Online Starter Circuit , которую мы обсуждаем ниже, предназначена только для понимания принципа работы, исходная конструкция стартера может отличаться.
MCCB (автоматический выключатель в литом корпусе) и секция ПРЕДОХРАНИТЕЛЯ:
На приведенном выше рисунке показаны схемы соединений между MCCB, предохранителями и двигателем. Основная функция этой части устройства прямого пуска — защита двигателя от неисправностей и коротких замыканий.
MCCB здесь будет выбран в соответствии с номинальными характеристиками двигателя, и в случае любой неисправности в соединениях или обмотках двигателя этот MCCB немедленно отключится, отключив всю систему от основной линии питания. MCCB обычно является первым уровнем защиты для всей системы, как показано выше. Они также устанавливаются в наших домах для обеспечения безопасности.
Предохранители в цепи присутствуют здесь для защиты двигателя и других устройств от короткого замыкания. Эти предохранители немедленно сгорают в случае короткого замыкания и отсоединяют двигатель от сети.Также необходимо точно выбирать номинал предохранителя, чтобы избежать нерегулярных взрывов во время работы. Это может произойти в случае сильного пускового тока во время запуска двигателя, поэтому важно выбрать предохранители соответствующего номинала. Узнайте больше о различных типах схем защиты здесь.
Секция электромагнитного контактора:
На приведенном выше рисунке показана внутренняя структура установки контактора, которая присутствует в трехфазном пускателе прямого включения и подключена к асинхронному двигателю.
Здесь трехфазное питание подключается к двигателю через три нормально разомкнутых металлических контакта, а именно «C1», «C2» и «C3». Таким образом, в состоянии покоя в цепи не течет ток, и двигатель остается выключенным. Также в это время кнопка «ВКЛ» будет разомкнута, и ток через катушку не будет протекать.
Теперь, , если мы нажмем кнопку «ВКЛ», тогда катушка здесь будет намагничена из-за протекания тока, как показано ниже.
Поскольку катушка создает здесь магнитное поле, металлический блок, подвешенный на пружине, притягивается к катушке и движется к ней.Теперь, когда металлический блок движется, вся установка контактора также будет двигаться вместе с ним, как показано на рисунке.
В результате этого движения металлические контакты C1, C2 и C3 закоротят открытые клеммы, имеющиеся между линией питания и клеммами статора, таким образом, включив двигатель. Проще говоря, после денежного нажатия кнопки двигатель будет получать питание от источника из-за движения трехфазного контактора. Кроме того, при перемещении трехфазного контактора пружина будет растягиваться, и она будет оказывать усилие на металлический блок, чтобы вернуть его в исходное положение.
После кратковременного нажатия и отпускания кнопки ВКЛ, ток в катушке, который должен быть равен нулю, все равно будет протекать, потому что будет другой путь для прохождения тока после того, как трехфазный контактор переместится в конечное положение. Вы можете видеть на рисунке замкнутую цепь, образованную для протекания тока через металлический контакт «SW».
Таким образом, после однократного нажатия кнопки «ВКЛ» трехфазный контактор самоблокируется с помощью металлического контакта «SW» и поддерживает соединение между трехфазным питанием и двигателем.
Теперь, чтобы остановить двигатель, нам нужно добавить еще одну кнопку в приведенную выше схему, как показано ниже.
Здесь «КНОПКА ВЫКЛЮЧЕНИЯ» будет действовать как короткое замыкание в состоянии покоя, и поэтому не будет никаких изменений в работе схемы, о которой мы говорили выше. Но как только будет нажата «КНОПКА ВЫКЛЮЧЕНИЯ», контур цепи, образованный между линией питания и катушкой, будет разорван, в результате чего ток, протекающий через катушку, станет нулевым. Теперь, когда ток через катушку равен нулю, катушка начнет размагничиваться, и как только катушка полностью потеряет намагниченность, трехфазный контактор вернется в исходное положение из-за силы, приложенной растянутой пружиной.Очевидно, теперь, когда трехфазный контактор вернулся в состояние покоя, напряжение питания на двигателе будет отключено, что приведет к остановке движений ротора.
Даже после того, как кнопка останова будет отпущена, трехфазный контактор будет оставаться в состоянии покоя до тех пор, пока кнопка пуска не будет нажата снова, чтобы намагнитить катушку. Следовательно, мы можем сделать вывод, что, используя эту настройку, мы можем включить двигатель навсегда, нажав одну кнопку, и навсегда остановить двигатель, нажав другую кнопку.
Секция защиты от перегрузки:
Ключевой частью секции защиты от перегрузки являются три катушки G1, G2 и G3, как показано на рисунке.Эти три катушки проводят тот же ток, что и обмотка якоря, поскольку они включены последовательно с трехфазным асинхронным двигателем. Таким образом, всякий раз, когда двигатель получает питание от линии электропередачи, эти три обмотки намагничиваются. И всякий раз, когда они намагничиваются, металлические кольца, закрепленные на валу, притягиваются катушками. Обычно это не проблема, но становится заметной после перегрузки двигателя.
Итак, для понимания функции этого раздела, давайте предположим, что двигатель был включен некоторое время назад и перегружен.Теперь, когда двигатель сильно нагружен, обмотка якоря будет потреблять большие токи от источника питания и тем самым косвенно намагничивать катушки G1, G2 и G3. В присутствии этого сильного магнитного поля металлические кольца преодолевают сопротивление пружины и выравниваются с соответствующими катушками. И как только металлические кольца переместятся в конечное положение, «контакт OL» также сместится вместе с ними, чтобы разорвать петлю «COIL-L».
Таким образом, конечным результатом сильно нагруженного двигателя является разрыв токовой петли, образованной между линией питания и «COIL-L».Здесь мы видим, что это в основном работает так же, как нажатие кнопки остановки, о которой мы упоминали выше. Конечным результатом в обоих случаях является полное отключение двигателя.
Следовательно, перегрузка двигателя приведет к отключению питающей сети и выключению двигателя.
Цепь управления стартером прямого включенияДо сих пор мы изучили три раздела, каждый из которых выполняет определенную функцию. И нам нужно объединить эти разделы вместе, чтобы сформировать стартер DOL.
Здесь вы можете увидеть окончательную внутреннюю структуру Direct Online Starter.
В окончательном заключении:
- Секция MCCB-FUSE обеспечивает защиту двигателя от короткого замыкания и неисправностей. Установка трехфазного контактора
- обеспечит простое и безопасное бистабильное переключение двигателя. Установка контактора
- O.L защитит двигатель от перегрузки.
- Самый экономичный и дешевый стартер: Из всех имеющихся стартеров для трехфазных асинхронных двигателей, пускатель прямого включения является самым дешевым и экономичным.
- Простота в эксплуатации: У стартера есть только две кнопки для включения и выключения и ручка для установки защиты от перегрузки, что упрощает работу.
- Простота обслуживания: Поскольку внутренняя структура пускателя проста, инженеры могут легко найти неисправности и устранить их.
- Поскольку нет защиты от запуска, двигатель с прямым пускателем обеспечивает 100% пусковой крутящий момент.
- Размеры DOL небольшие, что делает его компактным и надежным.
- Поскольку нет защиты от запуска, DOL-пускатель не ограничивает пусковой ток.
- Ненужный высокий пусковой момент при запуске двигателя.
- Подходит только для двигателей малой и средней мощности.
- Поскольку защиты от запуска нет, линия питания, к которой подключен двигатель, будет испытывать провалы напряжения во время запуска двигателя. Это колебание напряжения может повредить другое электрическое оборудование, питающееся от того же источника.
- Двигатель подвергается термическому напряжению, влияющему на срок его службы.
- Механическая нагрузка на двигатель увеличивается из-за ненужного высокого пускового момента во время запуска двигателя.
Что такое DOL Starter? Подключение и работа стартера с прямым подключением к сети
Пускатель прямого запускадля двигателей — схема запуска, работа, типы и применение с прямым подключением к сети
Асинхронный двигатель потребляет огромное количество тока при запуске. Этот пусковой ток может повредить обмотки двигателя.Во избежание повреждений мы используем различные методы снижения пускового тока с помощью пускателя двигателя. Эти методы зависят от номинальных характеристик двигателя и нагрузки, подключенной к двигателю. Помимо этого, пускатель двигателя также защищает двигатель от перегрузки и перегрузки по току.
Пускатель Direct Online или DOL использует метод пуска с полным напряжением или по сети, когда двигатель напрямую подключается к полному напряжению через MCCB или автоматический выключатель и реле для защиты от перегрузки.Поэтому такой стартер используется с асинхронными двигателями мощностью менее 5 л.с.
Что такое стартер Direct Online (DOL)?
DOL Starter (Direct Online Starter) также известен как «стартер через линию». Пускатель DOL представляет собой устройство, состоящее из главного контактора, защитных устройств и реле перегрузки, которое используется для запуска двигателя . Он используется для двигателей с низким рейтингом, обычно ниже 5 л.с.
При прямом пуске двигателя через пускатель обмотки статора двигателя напрямую подключаются к основному источнику питания, где DOL защищает цепь двигателя от высокого пускового тока, который может повредить всю цепь, поскольку начальный ток намного больше, чем полный номинальный ток.
Ниже приведена основная схема подключения DOL (Direct Online Starter).
Защита, обеспечиваемая DOL Starter:Пускатели двигателя не только обеспечивают безопасный пусковой ток, но и обеспечивают защиту, обеспечивающую безопасность двигателя во время работы. Понятно, что DOL-пускатель обеспечивает полное сетевое напряжение, но он обеспечивает следующую защиту:
Защита от перегрузки по току:
Состояние, которое вызывает протекание аварийного тока в большом количестве, в основном из-за короткого замыкания или замыкание на землю называется перегрузкой по току.
Состояние перегрузки по току может вызвать повреждение двигателя, линий электропередач и может представлять опасность для операторов. Такое количество тока слишком опасно для кратковременного использования.
В пускателе DOL мы используем автоматический выключатель или предохранители для защиты от перегрузки по току. Они размыкают цепь и мгновенно прерывают ток, пока проблема в системе не будет решена. Предохранитель или автоматический выключатель тщательно выбирается с учетом его номинальных характеристик. Потому что мы не хотим, чтобы предохранитель сломался, но чтобы он выдерживал пусковой ток, а также ток большой нагрузки.Номинальный ток автоматического выключателя немного превышает номинальный пусковой ток двигателя.
Защита от перегрузки:
Состояние, при котором нагрузка, подключенная к двигателю, превышает ее предел, и двигатель потребляет чрезмерный ток, называется состоянием перегрузки. Во время перегрузки ток выходит за допустимые пределы, что приводит к повреждению как проводов, так и обмоток двигателя. Он плавит обмотки и может стать причиной возгорания.
Для защиты двигателя от перегрузки мы используем реле перегрузки, которое отключает источник питания и защищает систему от перегрева.Реле перегрузки контролирует ток и прерывает ток, когда он превышает определенный предел в течение определенного периода времени. Механизм отключения может быть разным и зависит от применения двигателя.
Ниже приведены несколько типов реле перегрузки, используемых для защиты двигателя:
Тепловое реле перегрузки : Этот тип реле перегрузки работает по принципу расширения за счет тепла, выделяемого током. Биметаллическая полоса используется с различным тепловым расширением для разрыва или замыкания цепи в зависимости от температуры.
Магнитное реле перегрузки : такие реле работают по принципу магнитного поля, создаваемого током, протекающим через катушку. Чрезмерный ток, потребляемый двигателем (то есть заранее заданная величина), создает достаточное магнитное поле, чтобы размыкать контактные клеммы и прерывать подачу тока.
Электронное реле перегрузки : Электронное реле представляет собой твердотельное устройство без каких-либо подвижных частей или контактов. Он использует датчики тока для контроля тока двигателя и имеет регулируемую настройку, которая позволяет отключать в широком диапазоне номинальных значений тока.
Конструкция стартера DOL:Стартер DOL или Direct Online имеет просто две кнопки; Зеленый и красный, где зеленая кнопка используется для запуска, а красная — для остановки двигателя. Зеленая кнопка соединяет клеммы и замыкает цепь, а красная кнопка отключает клеммы и разрывает цепь.
Пускатель DOL состоит из автоматического выключателя или MCCB или предохранителя, реле перегрузки и контактора или катушки. Автоматический выключатель используется для защиты от коротких замыканий, а реле перегрузки защищает двигатель от перегрузки.Контактор используется для запуска и остановки двигателя, к которому подключены зеленая и красная кнопки. Подключение кнопок пуска и останова кратко объясняется в этой статье ниже.
Детали DOL-стартера:DOL-стартер состоит из следующих частей:
Автоматический выключатель или предохранитель:
Автоматический выключатель или предохранитель напрямую подключается к электросети и используется для защиты от короткие замыкания. Он отключает источник питания в случае короткого замыкания, чтобы защитить систему от любых потенциальных опасностей.
Магнитные контакторы:
Магнитный контактор — это электромагнитный переключатель, который действует электромагнитно для переключения мощности, подаваемой на двигатель. Он удобно соединяет и отключает несколько контактов, обеспечивая дистанционное управление работой.
Магнитное поле, создаваемое катушкой, используется для переключения клемм. Проходящий через катушку ток намагничивает железный сердечник, окруженный катушкой. Магнитная сила воздействует на якорь, замыкая или размыкая контакты.
Магнитные контакторы имеют три НО (нормально разомкнутых) главных контакта, используемых для питания двигателя, и вспомогательные контакты (НО и НЗ) с меньшим номиналом, используемым для цепи управления. Катушка подключается к источнику напряжения через вспомогательные контакты. Кроме того, имейте в виду, что катушка, используемая для однофазного и трехфазного питания, различается, так как напряжения питания различаются.
Реле перегрузки:
OLR или реле перегрузки — последняя деталь, используемая в пускателе прямого включения, и она используется для защиты от перегрузки двигателя.Он прерывает прохождение тока, когда он превышает определенный предел, но также выдерживает высокий пусковой ток. Таким образом, OLR тщательно выбирается таким образом, чтобы его предел тока срабатывания не падал ниже диапазона пускового тока.
Чрезмерное протекание тока может повредить изоляцию электрических проводов, а также обмотку двигателя. Ожидаемый срок службы двигателя уменьшается, и это может привести к короткому замыканию обмоток, что может вызвать пожар.
Простой предохранитель или автоматический выключатель не может защитить систему от перегрузки, потому что они используются для защиты от перегрузки по току (короткого замыкания).OLR имеет свойства измерения тока, которые могут различать пусковой ток и ток перегрузки.
Схема подключения стартера DOL:Подключение трехфазной и однофазной проводки немного отличается друг от друга. Ниже приведена электрическая схема трехфазного и однофазного пускового устройства:
Схема электрических соединений трехфазного прямого стартера :Это электрическая схема прямого пускателя
MCCB или автоматического выключателя : R, Y и фаза B подключены через MCCB к контакторам.
Магнитный контактор : Контактор имеет 3 типа контактов:
1) Главные контакты : Контактор имеет 3 главных (замыкающих) контакта, известных как L1, L2 и L3.
- L1 подключен к фазе R через MCCB
- L2 подключен к фазе Y через MCCB
- L3 подключен к фазе B через MCCB
- Точка 1 подключена к фазе R, а точка-2 подключена перегрузить точку реле Т1.
- Точка 3 подключена к фазе Y, а точка-4 подключена к точке реле перегрузки T2.
- Точка 5 подключена к фазе B, а точка-6 подключена к точке реле перегрузки T3.
2) Вспомогательные замыкающие контакты : вспомогательные замыкающие контакты 53 и 54 замыкаются при подаче напряжения на катушку. Он подключается через зеленую и красную кнопки.
- Точка-53 подключается к кнопке запуска точки-96
- Точка-54 подключается через кнопку остановки.
3) Вспомогательные нормально замкнутые контакты : нормально замкнутые контакты 95 и 96 реле перегрузки размыкаются, когда ток превышает определенный предел.
- Точка-96 подключена к кнопке остановки.
Катушка реле : Точки катушки реле A1 и A2 подключены к источнику напряжения через OLR, кнопку запуска и кнопку остановки.
- Точка A1 подключена к R-фазе из точки 1.
- Точка A2 подключена к NC клемме реле перегрузки точки 95.
Реле перегрузки: Реле перегрузки имеет нормально подключенные клеммы T1, T2 и T3, который подает питание на двигатель.
- T1 подключен к точке 2 контактора.
- T2 подключен к точке 4 контактора.
- T3 подключен к точке 6 контактора.
Однофазный пускатель двигателя прямого тока может быть спроектирован с использованием тех же компонентов, что показаны на следующей схеме.
Мы должны использовать все 3 полюса реле перегрузки, иначе дисбаланс из-за протекания тока только в 2 из них вызовет ненужное отключение.
Работа DOL-стартера:DOL-стартер подключает 3-фазный источник напряжения, то есть R-фазу, Y-фазу и B-фазу, к клеммам асинхронного двигателя.
На приведенной выше схеме стартера DOL есть два типа цепей; Схема управления и силовая цепь.
Цепь управления :
Она питается только от 2 фаз источника питания и отвечает за запуск и остановку питания, подаваемого на двигатель.
Зеленая кнопка пуска и красная кнопка останова подключены к цепи управления. Нажатие на зеленую кнопку на мгновение запускает двигатель, и питание подается, когда он отпускается. Нажатие на красную кнопку прекращает подачу питания и останавливает двигатель.
Нажатие кнопки пуска (зеленая) :
Зеленая кнопка подключена к источнику питания фазы B через точку 5 и точку 53, и она подключает его к точке A2 катушки реле через точку 96 OLR 95.
Нажатие зеленой кнопки замыкает контакты и подает напряжение на катушку реле, которая питает ее. Катушка перемещает контактор в закрытое положение, и питание подается на асинхронный двигатель.
Отпускание кнопки пуска (зеленая) :
Когда кнопка пуска отпущена, напряжение на катушке реле сохраняется. Подача напряжения подается от точки 54 контактора (замкнутое положение) через точку 95-96 OLR.
В случае перегрузки точка 95-96 OLR размыкается и обесточивает катушку для размыкания контакторов.
Нажатие кнопки останова (красной) :
После отпускания кнопки пуска нажатие кнопки останова размыкает ее контакты и прерывает подачу напряжения на катушку реле. следовательно, катушка обесточивается, контактор переключается в разомкнутое положение и прекращает подачу питания на двигатель.
Цепь питания:
Цепь питания отвечает за подачу питания на двигатель. Его задача — пропускать большой ток, необходимый для питания двигателя.Переключение этой схемы контролируется схемой управления.
Принцип прямого пуска:Пускатель с прямым подключением работает от полного напряжения или от сети, когда двигатель напрямую подключается к источнику полного напряжения. Поскольку нет снижения напряжения, пусковой ток очень высок, что приводит к высокому пусковому крутящему моменту.
Когда двигатель запускается, он потребляет большой ток, обычно в 5–6 раз превышающий его номинальный ток на полной скорости.Большое потребление тока вызовет падение напряжения в сети. Постепенное увеличение скорости приведет к уменьшению тока, потребляемого от линий, но не ниже определенной скорости (обычно на 75%). Как только двигатель достигнет номинальной скорости, потребляемый ток и линейное напряжение вернутся в норму.
Поскольку dol обеспечивает высокий пусковой ток, двигатель генерирует высокий пусковой момент. Создаваемый крутящий момент также зависит от мощности двигателя. Нагрузка, подключенная к двигателю, влияет на ускорение и время, необходимое для достижения полной скорости.Если нагрузка, подключенная к двигателю, имеет высокий крутящий момент, чем крутящий момент, передаваемый двигателем, двигатель не будет ускоряться. И вам нужно заменить его на мотор с большим пусковым моментом.
Также имейте в виду, что пусковой ток может повредить обмотки двигателя. Таким образом, двигатели малой мощности подключаются через пускатель DOL.
Характеристики, преимущества / недостатки и применение DOL Starter
Преимущества
- Он очень прост в проектировании, эксплуатации и обслуживании.
- Самый дешевый и экономичный стартер.
- Имеет компактный дизайн и занимает меньше места.
- Обеспечивает 100% пускового момента.
- Схема управления (зеленая и красная кнопка) проста, и непрофессионал может ею управлять.
- Понимание и устранение неисправностей в системе проще.
- Соединяет обмотку двигателя треугольником.
Недостатки
- Поскольку в нем используется метод пуска при полном напряжении, пусковой ток очень высок.
- Пусковой высокий ток может повредить двигатель, поэтому следует использовать только двигатели с низким номиналом.
- Высокий пусковой ток вызывает падение напряжения в линиях электропередач, которое может быть опасным для других параллельно подключенных устройств.
- В некоторых случаях высокий пусковой крутящий момент может быть ненужным.
- Высокий пусковой крутящий момент вызывает механическое напряжение, сокращая срок службы самого двигателя.
- Нет контроля пускового тока и крутящего момента.
Характеристики:
Ниже перечислены некоторые особенности пускателей прямого запуска;
- Обеспечивает высокий пусковой ток.
- Обеспечивает высокий пусковой момент.
- Это вызывает падение напряжения в электросети.
- Имеет самый простой механизм управления.
- Подходит для двигателей малой мощности.
Приложения:
- Пускатели DOL используются для двигателей с малой мощностью.
- Где пусковой ток не повредит обмотки двигателя.
- Для приложений, в которых пусковой ток не вызывает сильных провалов сетевого напряжения.
- Устройства прямого пуска в режиме онлайн используются для небольших водяных насосов, конвейерных лент, вентиляторов и компрессоров.
Похожие сообщения:
ХАРАКТЕРИСТИКИ ДВИГАТЕЛЯ — прикладное промышленное электричество
После введения Эдисоном в США системы распределения электроэнергии постоянного тока начался постепенный переход к более экономичной системе переменного тока. Освещение работало как на переменном, так и на постоянном токе. Передача электрической энергии на более длинные расстояния с меньшими потерями на переменном токе.Однако у двигателей была проблема с переменным током. Первоначально двигатели переменного тока были сконструированы как двигатели постоянного тока, но возникли многочисленные проблемы из-за изменения магнитных полей.
Рисунок 5.1 Схема семейства электродвигателей переменного токаЧарльз П. Стейнмец внес свой вклад в решение этих проблем, исследуя гистерезисные потери в железной арматуре. Никола Тесла представил совершенно новый тип двигателя, когда он представил вращающуюся турбину, вращающуюся не водой или паром, а вращающимся магнитным полем.Его новый тип двигателя, асинхронный двигатель переменного тока, по сей день является рабочей лошадкой в отрасли. Его прочность и простота обеспечивают долгий срок службы, высокую надежность и низкие эксплуатационные расходы. Тем не менее, небольшие щеточные электродвигатели переменного тока, аналогичные разнообразным электродвигателям постоянного тока, сохраняются в небольших приборах вместе с небольшими асинхронными электродвигателями Tesla. Выше одной лошадиной силы (750 Вт) царит мотор Tesla.
Современные твердотельные электронные схемы приводят в действие бесщеточные двигатели постоянного тока с сигналами переменного тока, генерируемыми от источника постоянного тока.Бесщеточный электродвигатель постоянного тока, фактически электродвигатель переменного тока, заменяет обычный щеточный электродвигатель постоянного тока во многих приложениях. И шаговый двигатель , цифровая версия двигателя, приводится в движение прямоугольными волнами переменного тока, опять же генерируемыми твердотельной схемой. На рисунке выше показано генеалогическое древо двигателей переменного тока, описанных в этой главе.
Круизные лайнеры и другие крупные суда заменяют карданные валы с редукторами большими многомегаваттными генераторами и двигателями. Так было с тепловозами меньшего масштаба в течение многих лет.
Рисунок 5.2 Диаграмма уровней моторной системыНа системном уровне (рисунок выше) двигатель потребляет электрическую энергию в виде разности потенциалов и тока, преобразуя ее в механическую работу. К сожалению, электродвигатели не на 100% эффективны. Часть электроэнергии теряется на тепло, другой вид энергии, из-за потерь I2R (также называемых потерями в меди) в обмотках двигателя. Тепло — нежелательный побочный продукт этого преобразования. Его необходимо снимать с двигателя, так как это может отрицательно сказаться на долговечности.Таким образом, одна из целей — максимизировать КПД двигателя, уменьшая тепловые потери. Двигатели переменного тока также имеют некоторые потери, с которыми не сталкиваются двигатели постоянного тока: гистерезис и вихревые токи.
Большинство двигателей переменного тока являются асинхронными. Асинхронные двигатели пользуются популярностью из-за их прочности и простоты. Фактически, 90% промышленных двигателей — это асинхронные двигатели.
Никола Тесла разработал основные принципы многофазного асинхронного двигателя в 1883 году и к 1888 году создал модель мощностью в половину лошадиных сил (400 Вт). Тесла продал права на производство Джорджу Вестингаузу за 65 000 долларов.Самые большие (> 1 л.с. или 1 кВт) промышленные двигатели — это многофазные асинхронные двигатели . Под многофазностью мы подразумеваем, что статор содержит несколько различных обмоток на каждый полюс двигателя, приводимых в действие соответствующими сдвинутыми во времени синусоидальными волнами. На практике это две-три фазы. Крупные промышленные двигатели трехфазные. Хотя для простоты мы включили многочисленные иллюстрации двухфазных двигателей, мы должны подчеркнуть, что почти все многофазные двигатели являются трехфазными. Под асинхронным двигателем мы подразумеваем, что обмотки статора индуцируют ток в проводниках ротора, как трансформатор, в отличие от коллекторного двигателя постоянного тока с коллектором.
Конструкция асинхронного двигателя переменного тока
Асинхронный двигатель состоит из ротора, известного как якорь, и статора, содержащего обмотки, подключенные к многофазному источнику энергии, как показано на рисунке ниже. Простой двухфазный асинхронный двигатель, представленный ниже, похож на двигатель мощностью 1/2 лошадиные силы, который Никола Тесла представил в 1888 году.
Рисунок 5.3 Многофазный асинхронный двигатель TeslaСтатор на рисунке выше намотан парами катушек, соответствующих фазам доступной электрической энергии.Статор двухфазного асинхронного двигателя выше имеет 2 пары катушек, по одной паре для каждой из двух фаз переменного тока. Отдельные катушки пары соединены последовательно и соответствуют противоположным полюсам электромагнита. То есть одна катушка соответствует N-полюсу, другая — S-полюсу, пока фаза переменного тока не изменит полярность. Другая пара катушек ориентирована в пространстве под углом 90 ° к первой паре. Эта пара катушек подключена к переменному току, сдвинутому во времени на 90 ° в случае двухфазного двигателя. Во времена Теслы источником двух фаз переменного тока был двухфазный генератор переменного тока.Статор на рисунке выше имеет выступающих полюсов, явно выступающих полюсов, которые использовались в ранних асинхронных двигателях Tesla. Эта конструкция используется по сей день для двигателей с малой мощностью (<50 Вт). Однако для более мощных двигателей меньшая пульсация крутящего момента и более высокий КПД достигается, если катушки встроены в пазы, вырезанные в пластинах статора (рисунок ниже).
Рисунок 5.4 Рама статора с пазами для обмотокПластины статора представляют собой тонкие изолированные кольца с прорезями, пробитыми из листов электротехнической стали.Набор из них закреплен концевыми винтами, которые также могут удерживать концевые кожухи.
Рисунок 5.5 Статор с обмотками 2-φ (а) и 3-φ (б)На рисунке выше обмотки двухфазного и трехфазного двигателей установлены в пазы статора. Катушки наматываются на внешнее приспособление, а затем вставляются в пазы. Изоляция, зажатая между периферией катушки и пазом, защищает от истирания. Фактические обмотки статора более сложны, чем отдельные обмотки на полюс на рисунке выше.Сравнивая двигатель 2-φ с двигателем Tesla 2-φ с выступающими полюсами, количество катушек такое же. В реальных больших двигателях обмотка полюса разделена на идентичные катушки, вставленные во множество пазов меньшего размера, чем указано выше. Эта группа называется фазовой лентой (см. Рисунок ниже). Распределенные катушки фазового пояса подавляют некоторые нечетные гармоники, создавая более синусоидальное распределение магнитного поля по полюсу. Это показано в разделе синхронного двигателя. В прорезях на краю стойки может быть меньше витков, чем в других прорезях.Краевые пазы могут содержать обмотки от двух фаз. То есть фазовые пояса перекрываются.
Рисунок 5.6 Перекрытие фазовых лентКлючом к популярности асинхронного двигателя переменного тока является его простота, о чем свидетельствует простой ротор (рисунок ниже). Ротор состоит из вала, стального пластинчатого ротора и встроенной медной или алюминиевой беличьей клетки , показанной в (b), снятой с ротора. По сравнению с якорем двигателя постоянного тока, здесь нет коммутатора. Это устраняет щетки, искрение, искрение, графитовую пыль, регулировку и замену щеток, а также повторную обработку коллектора.
Рисунок 5.7 Многослойный ротор с (а) встроенной беличьей клеткой, (б) токопроводящей клеткой, удаленной с ротораПроводники в короткозамкнутой клетке могут быть перекошены, перекручены относительно вала. Несоосность пазов статора снижает пульсации крутящего момента. Сердечники ротора и статора состоят из пакета изолированных пластин. Пластины покрыты изолирующим оксидом или лаком для минимизации потерь на вихревые токи. Сплав, используемый в пластинах, выбран из соображений низких гистерезисных потерь.
Теория работы асинхронных двигателей
Краткое объяснение работы заключается в том, что статор создает вращающееся магнитное поле, которое волочит ротор. Теория работы асинхронных двигателей основана на вращающемся магнитном поле. Один из способов создания вращающегося магнитного поля — вращение постоянного магнита. Если движущиеся магнитные линии потока разрезают проводящий диск, он будет следовать за движением магнита. Линии магнитного потока, разрезающие проводник, будут индуцировать напряжение и, как следствие, ток в проводящем диске.Этот поток тока создает электромагнит, полярность которого противодействует движению постоянного магнита — Закон Ленца . Полярность электромагнита такова, что он тянется к постоянному магниту. Диск следует с немного меньшей скоростью, чем постоянный магнит.
Рисунок 5.8 Вращающееся магнитное поле создает крутящий момент в проводящем диске Вращающееся магнитное поле создает крутящий момент в проводящем дискеКрутящий момент, развиваемый диском, пропорционален количеству силовых линий, разрезающих диск, и скорости, с которой он разрезает диск.Если бы диск вращался с той же скоростью, что и постоянный магнит, не было бы ни потока, разрезающего диск, ни индуцированного тока, ни поля электромагнита, ни крутящего момента. Таким образом, скорость диска всегда будет ниже скорости вращающегося постоянного магнита, так что линии потока, разрезающие диск, индуцируют ток, создают электромагнитное поле в диске, которое следует за постоянным магнитом. Если к диску приложена нагрузка, замедляющая его, будет развиваться больший крутящий момент, поскольку больше линий магнитного потока разрезают диск. Крутящий момент пропорционален скольжению , степени, на которую диск отстает от вращающегося магнита.Большее скольжение соответствует большему потоку, разрезающему проводящий диск, развивающему больший крутящий момент. Аналоговый автомобильный вихретоковый спидометр основан на принципе, показанном выше. Когда диск удерживается пружиной, отклонение диска и иглы пропорционально скорости вращения магнита. Вращающееся магнитное поле создается двумя катушками, расположенными под прямым углом друг к другу, которые управляются токами, которые не совпадают по фазе на 90 °. Это не должно вызывать удивления, если вы знакомы с диаграммами Лиссажу на осциллографе.
Рисунок 5.9 В противофазе (90 °) синусоидальные волны образуют круговую диаграмму ЛиссажуСмещенные по фазе (90 °) синусоидальные волны образуют круговую диаграмму Лиссажу На приведенном выше рисунке круговая диаграмма Лиссажу создается при подаче горизонтального и вертикального входных сигналов осциллографа с отклонением фазы синусоидальных волн на 90 °. Начиная с (a) с максимальным отклонением «X» и минимальным «Y», след перемещается вверх и влево в направлении (b). Между (a) и (b) две формы волны равны 0.707 Впик при 45 °. Эта точка (0,707, 0,707) попадает на радиус окружности между (a) и (b). Трасса перемещается в (b) с минимальным отклонением «X» и максимальным отклонением «Y». При максимальном отрицательном отклонении «X» и минимальном отклонении «Y» след перемещается в (c). Затем с минимальным «X» и максимальным отрицательным «Y» он переходит в (d), а затем обратно в (a), завершая один цикл.
Рисунок 5.10 Окружность синуса по оси X и косинуса по оси YНа рисунке показаны две синусоидальные волны с фазовым сдвигом на 90 °, приложенные к отклоняющим пластинам осциллографа, расположенным под прямым углом в пространстве.Комбинация фазированных синусоидальных волн на 90 ° и отклонения под прямым углом дает двумерный узор — круг. Этот круг очерчен электронным лучом, вращающимся против часовой стрелки.
Полная скорость двигателя и скорость синхронного двигателя
Скорость вращения вращающегося магнитного поля статора связана с количеством пар полюсов на фазу статора. На приведенном ниже рисунке «полная скорость» всего шесть полюсов или три пары полюсов и три фазы. Однако на каждую фазу приходится только одна пара полюсов.Магнитное поле будет вращаться один раз за цикл синусоидальной волны. В случае мощности 60 Гц поле вращается со скоростью 60 раз в секунду или 3600 оборотов в минуту (об / мин). При мощности 50 Гц он вращается со скоростью 50 оборотов в секунду или 3000 об / мин. 3600 и 3000 об / мин — это синхронная скорость двигателя. Хотя ротор асинхронного двигателя никогда не достигает этой скорости, это определенно верхний предел. Если мы удвоим количество полюсов двигателя, синхронная скорость уменьшится вдвое, потому что магнитное поле вращается в пространстве на 180 ° на 360 ° электрической синусоидальной волны.
Рисунок 5.11 Удвоение полюсов статора уменьшает синхронную скорость вдвоеСинхронная скорость определяется по формуле:
[латекс] N_s = \ frac {120 \ cdot f} {P} [/ латекс]
Где:
Н с = Скорость магнитного поля (об / мин)
f = частота подаваемой мощности (Гц)
P = общее количество полюсов на фазу, кратное 2
На приведенном выше рисунке «половинная скорость» четыре полюса на фазу (3 фазы).Синхронная скорость для мощности 50 Гц составляет: S = 120 · 50/4 = 1500 об / мин
Краткое объяснение асинхронного двигателя состоит в том, что вращающееся магнитное поле, создаваемое статором, увлекает за собой ротор. Более подробное и более правильное объяснение состоит в том, что магнитное поле статора индуцирует переменный ток в проводниках короткозамкнутого ротора, которые составляют трансформатор. вторичный. Этот индуцированный ток ротора, в свою очередь, создает магнитное поле. Магнитное поле вращающегося статора взаимодействует с этим полем ротора.Поле ротора пытается выровняться с полем вращающегося статора. Результат — вращение ротора с короткозамкнутым ротором. Если бы не было механической нагрузки крутящего момента двигателя, подшипников, сопротивления ветра или других потерь, ротор вращался бы с синхронной скоростью. Однако проскальзывание между ротором и полем статора синхронной скорости развивает крутящий момент. Именно магнитный поток, разрезающий проводники ротора при его проскальзывании, создает крутящий момент. Таким образом, нагруженный двигатель будет скользить пропорционально механической нагрузке.Если бы ротор работал с синхронной скоростью, не было бы потока статора, разрезающего ротор, не было бы тока, индуцированного в роторе, не было бы крутящего момента.
Крутящий момент в асинхронных двигателях
Когда питание подается на двигатель впервые, ротор находится в состоянии покоя, а магнитное поле статора вращается с синхронной скоростью N s . Поле статора режет ротор с синхронной скоростью N s . Ток, индуцированный в закороченных витках ротора, является максимальным, как и частота тока, частота сети.По мере увеличения скорости ротора скорость, с которой магнитный поток статора сокращает ротор, представляет собой разницу между синхронной скоростью N s и фактической скоростью N ротора, или (N s — N). Отношение фактического потока, разрезающего ротор, к синхронной скорости определяется как скольжение :
[латекс] s = \ frac {(N_s — N)} {N_s} [/ латекс]
Где:
Н с = синхронная скорость
N = частота вращения ротора
Частота тока, наведенного в проводники ротора, равна только частоте сети при пуске двигателя и уменьшается по мере приближения ротора к синхронной скорости. Частота ротора определяется по:
[латекс] f_r = s \ cdot f [/ латекс]
Где:
с = скольжение,
f = частота сети статора
Скольжение при 100% крутящем моменте обычно составляет 5% или меньше в асинхронных двигателях. Таким образом, для частоты сети f = 50 Гц частота наведенного тока в роторе:
f r = S (f)
= 0,05 (50 Гц)
= 2,5 Гц.
Почему он такой низкий? Магнитное поле статора вращается с частотой 50 Гц.Скорость вращения ротора на 5% меньше. Вращающееся магнитное поле режет ротор только с частотой 2,5 Гц. 2,5 Гц — это разница между синхронной скоростью и фактической скоростью ротора. Если ротор вращается немного быстрее при синхронной скорости, никакой магнитный поток не будет резать ротор вообще, f r = 0.
Рисунок 5.12 Зависимость крутящего момента и скорости от% скольжения.На приведенном выше графике показано, что пусковой крутящий момент, известный как крутящий момент при заторможенном роторе (T LR ), превышает 100% крутящего момента при полной нагрузке (T FL ), безопасного продолжительного крутящего момента.Крутящий момент заблокированного ротора составляет около 175% от T FL для приведенного выше примера двигателя. Пусковой ток, известный как , ток заторможенного ротора (I LR ) составляет 500% от тока полной нагрузки (I FL ), безопасного рабочего тока. Ток большой, потому что это аналог закороченной вторичной обмотки трансформатора. Когда ротор начинает вращаться, крутящий момент может немного уменьшиться для определенных классов двигателей до значения, известного как тяговый момент . Это самое низкое значение крутящего момента, с которым когда-либо сталкивался пусковой двигатель.Когда ротор набирает 80% синхронной скорости, крутящий момент увеличивается со 175% до 300% крутящего момента полной нагрузки. Этот момент пробоя (T BD ) происходит из-за большего, чем обычно, 20% скольжения. Сила тока в этот момент уменьшилась лишь незначительно, но после этого будет быстро уменьшаться. Когда ротор ускоряется с точностью до нескольких процентов от синхронной скорости, как крутящий момент, так и ток значительно уменьшаются. При нормальной работе скольжение будет составлять всего несколько процентов. Для работающего двигателя любой участок кривой крутящего момента ниже 100% номинального крутящего момента является нормальным.Нагрузка двигателя определяет рабочую точку на кривой крутящего момента. В то время как крутящий момент и ток двигателя могут превышать 100% в течение нескольких секунд во время запуска, продолжительная работа выше 100% может привести к повреждению двигателя. Любая крутящая нагрузка двигателя, превышающая крутящий момент пробоя, приведет к остановке двигателя. Крутящий момент, скольжение и ток будут приближаться к нулю в условиях нагрузки «без механического крутящего момента». Это условие аналогично разомкнутому вторичному трансформатору. Существует несколько основных конструкций асинхронных двигателей, которые значительно отличаются от кривой крутящего момента, приведенной выше.Различные конструкции оптимизированы для запуска и работы с различными типами нагрузок. Крутящий момент заблокированного ротора (T LR ) для двигателей различных конструкций и размеров составляет от 60% до 350% момента полной нагрузки (T FL ). Пусковой ток или ток заторможенного ротора (I LR ) может находиться в диапазоне от 500% до 1400% от тока полной нагрузки (I FL ). Этот потребляемый ток может вызвать проблемы с запуском больших асинхронных двигателей.
Классы двигателей NEMA и IEC
Различные стандартные классы (или конструкции) двигателей, соответствующие кривым крутящего момента (рисунок ниже), были разработаны для лучшего управления нагрузками различных типов.Национальная ассоциация производителей электрооборудования (NEMA) определила классы двигателей A, B, C и D для удовлетворения этих требований к приводам. Аналогичные классы N и H Международной электротехнической комиссии (IEC) соответствуют конструкциям NEMA B и C соответственно.
Рисунок 5.13 Характеристики для проектов NEMAХарактеристики для проектов NEMA
Все двигатели, за исключением класса D, работают со скольжением 5% или менее при полной нагрузке.
- Класс B (IEC Class N) Двигатели используются по умолчанию в большинстве приложений.При пусковом моменте LRT = от 150% до 170% от FLT он может запускать большинство нагрузок без чрезмерного пускового тока (LRT). КПД и коэффициент мощности высокие. Обычно он приводит в действие насосы, вентиляторы и станки.
- Класс A Пусковой момент такой же, как у класса B. Пусковой момент и пусковой ток (LRT) выше. Этот двигатель справляется с переходными перегрузками, которые встречаются в машинах для литья под давлением.
- Class C (IEC Class H) имеет более высокий пусковой крутящий момент, чем классы A и B при LRT = 200% от FLT.Этот двигатель применяется для тяжелых пусковых нагрузок, которые необходимо приводить в действие с постоянной скоростью, таких как конвейеры, дробилки, поршневые насосы и компрессоры.
- Двигатели класса D имеют самый высокий пусковой момент (LRT) в сочетании с низким пусковым током из-за высокого скольжения (от 5% до 13% при FLT). Высокое скольжение приводит к более низкой скорости. Регулировка скорости плохая. Тем не менее, двигатель отлично справляется с нагрузками с переменной скоростью, например с маховиком для аккумулирования энергии. Применения включают пробивные прессы, ножницы и подъемники.
- Класс E Двигатели являются версией класса B с более высоким КПД.
- Класс F Двигатели имеют гораздо более низкие LRC, LRT и крутящий момент, чем у класса B. Они управляют постоянными, легко запускаемыми нагрузками.
Коэффициент мощности асинхронных двигателей
Асинхронные двигатели имеют отстающий (индуктивный) коэффициент мощности от линии электропередачи. Коэффициент мощности больших полностью нагруженных высокоскоростных двигателей может достигать 90% для больших высокоскоростных двигателей. При 3/4 полной нагрузки максимальный коэффициент мощности высокоскоростного двигателя может составлять 92%.Коэффициент мощности малых тихоходных двигателей может составлять всего 50%. При запуске коэффициент мощности может находиться в диапазоне от 10% до 25%, увеличиваясь по мере достижения ротором скорости. Коэффициент мощности (PF) значительно зависит от механической нагрузки двигателя (рисунок ниже). Ненагруженный двигатель аналогичен трансформатору без резистивной нагрузки на вторичной обмотке. Небольшое сопротивление отражается от вторичной обмотки (ротора) к первичной обмотке (статору). Таким образом, в линии электропередачи присутствует реактивная нагрузка до 10% коэффициента мощности. Когда ротор нагружен, возрастающая резистивная составляющая отражается от ротора к статору, увеличивая коэффициент мощности.
Рисунок 5.14 Коэффициент мощности и КПД асинхронного двигателяКПД асинхронного двигателя
Большие трехфазные двигатели более эффективны, чем трехфазные двигатели меньшего размера, и почти все однофазные двигатели. КПД большого асинхронного двигателя может достигать 95% при полной нагрузке, хотя чаще встречается 90%. Эффективность малонагруженного или ненагруженного асинхронного двигателя низкая, потому что большая часть тока связана с поддержанием намагничивающего потока. Когда нагрузка крутящего момента увеличивается, больше тока потребляется для создания крутящего момента, в то время как ток, связанный с намагничиванием, остается фиксированным.Эффективность при 75% FLT может быть немного выше, чем при 100% FLT. Эффективность снижается на несколько процентов при FLT 50% и снижается еще на несколько процентов при FLT 25%. Эффективность становится низкой только ниже 25% FLT. Изменение КПД в зависимости от нагрузки показано на рисунке выше. Индукционные двигатели обычно имеют завышенные размеры, чтобы гарантировать, что их механическая нагрузка может быть запущена и приведена в действие при любых условиях эксплуатации. Если многофазный двигатель нагружен менее 75% номинального крутящего момента, когда КПД достигает пика, КПД страдает лишь незначительно до 25% FLT.
Корректор коэффициента мощности Nola
Фрэнк Нола из НАСА предложил корректор коэффициента мощности (PFC) в качестве энергосберегающего устройства для однофазных асинхронных двигателей в конце 1970-х годов. Он основан на предположении, что асинхронный двигатель с неполной нагрузкой менее эффективен и имеет меньший коэффициент мощности, чем двигатель с полной нагрузкой. Таким образом, в частично загруженных двигателях, в частности, в двигателях 1-φ, можно сэкономить энергию. Энергия, потребляемая для поддержания магнитного поля статора, относительно фиксирована по отношению к изменениям нагрузки.Хотя в полностью загруженном двигателе экономить нечего, напряжение на частично загруженном двигателе может быть уменьшено, чтобы уменьшить энергию, необходимую для поддержания магнитного поля. Это повысит коэффициент мощности и эффективность. Это была хорошая концепция для заведомо неэффективных однофазных двигателей, для которых она предназначалась. Эта концепция не очень применима к большим трехфазным двигателям. Из-за их высокого КПД (90% +) экономия энергии невелика. Более того, двигатель с КПД 95% по-прежнему имеет КПД 94% при 50% крутящем моменте при полной нагрузке (FLT) и 90% КПД при 25% FLT.Потенциальная экономия энергии при переходе от 100% FLT к 25% FLT составляет разницу в эффективности 95% — 90% = 5%. Это не 5% мощности при полной нагрузке, а 5% мощности при пониженной нагрузке. Корректор коэффициента мощности Nola может быть применим к 3-фазному двигателю, который большую часть времени простаивает (ниже 25% FLT), например к пробивному прессу. Срок окупаемости дорогостоящего электронного контроллера был оценен как непривлекательный для большинства приложений. Тем не менее, он может быть экономичным в составе электронного пускателя двигателя или регулятора скорости.Асинхронный двигатель может работать как генератор переменного тока, если это привод
.Асинхронные двигатели в качестве генераторов переменного тока
Асинхронный двигатель может работать как генератор переменного тока, если он приводится в действие крутящим моментом, превышающим 100% синхронной скорости (рисунок ниже). Это соответствует нескольким% «отрицательного» скольжения, скажем, -1%. Это означает, что, поскольку мы вращаем двигатель быстрее, чем синхронная скорость, ротор продвигается на 1% быстрее, чем вращающееся магнитное поле статора. Обычно он отстает в двигателе на 1%.Поскольку ротор разрезает магнитное поле статора в противоположном направлении (впереди), ротор индуцирует напряжение в статоре, возвращая электрическую энергию обратно в линию электропередачи.
Рисунок 5.15 Отрицательный крутящий момент превращает асинхронный двигатель в генераторТакой индукционный генератор должен возбуждаться «живым» источником мощностью 50 или 60 Гц. В случае сбоя в электроснабжении энергокомпании выработка электроэнергии невозможна. Этот тип генератора не подходит в качестве резервного источника питания.Преимущество ветряного генератора вспомогательной энергии состоит в том, что он не требует автоматического выключателя отключения питания для защиты ремонтных бригад. Это безотказно.
Небольшие удаленные (от электросети) установки могут быть выполнены с самовозбуждением путем размещения конденсаторов параллельно фазам статора. Если снять нагрузку, остаточный магнетизм может вызвать небольшой ток. Этот ток может протекать через конденсаторы без рассеивания мощности. Когда генератор достигает полной скорости, ток увеличивается, чтобы подать ток намагничивания на статор.В этот момент может быть приложена нагрузка. Слабое регулирование напряжения. Асинхронный двигатель может быть преобразован в генератор с самовозбуждением путем добавления конденсаторов.
Процедура запуска заключается в доведении ветряной турбины до скорости в двигательном режиме путем подачи на статор нормального напряжения линии электропередачи. Любая вызванная ветром скорость турбины, превышающая синхронную, будет развивать отрицательный крутящий момент, возвращая мощность в линию электропередачи, изменяя нормальное направление электрического счетчика киловатт-часов.В то время как асинхронный двигатель представляет отстающий коэффициент мощности для линии электропередачи, асинхронный генератор переменного тока представляет собой ведущий коэффициент мощности. Индукционные генераторы не получили широкого распространения на обычных электростанциях. Скорость привода паровой турбины является постоянной и регулируемой в соответствии с требованиями синхронных генераторов переменного тока. Синхронные генераторы также более эффективны.
Скорость ветряной турбины трудно контролировать, и скорость ветра может изменяться порывами. Асинхронный генератор лучше справляется с этими колебаниями из-за собственного проскальзывания.Это меньше нагружает зубчатую передачу и механические компоненты, чем синхронный генератор. Однако это допустимое изменение скорости составляет всего около 1%. Таким образом, индукционный генератор, подключенный к прямой линии, считается ветряной турбиной с фиксированной скоростью (см. Асинхронный генератор с двойным питанием для истинного генератора переменного тока с регулируемой скоростью). Несколько генераторов или несколько обмоток на общем валу можно переключать для обеспечения высокой и низкой скорости, чтобы приспособиться к переменным ветровым условиям.
Асинхронные двигатели с несколькими полями
Асинхронные двигателимогут содержать несколько обмоток возбуждения, например, 4-полюсную и 8-полюсную обмотки, соответствующие синхронным скоростям вращения 1800 и 900 об / мин.Подать питание на то или иное поле менее сложно, чем на повторное подключение катушек статора.
Рисунок 5.16 Несколько полей позволяют изменять скоростьЕсли поле сегментировано с выведенными выводами, его можно изменить (или переключить) с 4-полюсного на 2-полюсное, как показано выше для 2-фазного двигателя. Сегменты 22,5 ° переключаются на сегменты 45 °. Для ясности выше показана только проводка для одной фазы. Таким образом, наш асинхронный двигатель может работать на нескольких скоростях. При переключении вышеуказанного двигателя 60 Гц с 4 полюсов на 2 полюса синхронная скорость увеличивается с 1800 до 3600 об / мин.
Q: Если двигатель приводится в действие частотой 50 Гц, каковы будут соответствующие 4-полюсные и 2-полюсные синхронные скорости?
А:
[латекс] N_s = \ frac {120f} {P} [/ latex] [latex] N_s = \ frac {120 * 50Hz} {4} [/ latex] [latex] = 1500 об / мин (4-полюсный) [ / латекс]
[латекс] N_s = \ frac {120f} {P} [/ latex] [latex] N_s = \ frac {120 * 50Hz} {2} [/ latex] [latex] = 3000 об / мин (2-полюсный) [ / латекс]
Двигатели асинхронные с переменным напряжением
Скорость малых асинхронных двигателей с короткозамкнутым ротором для таких применений, как приводные вентиляторы, может быть изменена путем снижения сетевого напряжения.Это снижает крутящий момент, доступный нагрузке, что снижает скорость (см. Рисунок ниже).
Рисунок 5.17 Регулирование переменного напряжения, скорость асинхронного двигателяЭлектронное регулирование скорости в асинхронных двигателях
Современная полупроводниковая электроника расширяет возможности управления скоростью. Изменяя частоту сети 50 или 60 Гц на более высокие или более низкие значения, можно изменить синхронную скорость двигателя. Однако уменьшение частоты тока, подаваемого на двигатель, также снижает реактивное сопротивление X L , что увеличивает ток статора.Это может привести к насыщению магнитной цепи статора с катастрофическими последствиями. На практике напряжение на двигателе необходимо уменьшать при уменьшении частоты.
Рисунок 5.18 Электронный частотно-регулируемый приводИ наоборот, частота привода может быть увеличена для увеличения синхронной скорости двигателя. Однако необходимо увеличить напряжение, чтобы преодолеть увеличивающееся реактивное сопротивление, чтобы поддерживать ток на нормальном уровне и поддерживать крутящий момент. Инвертор приближает синусоидальные волны к двигателю с помощью выходов с широтно-импульсной модуляцией.Это прерывистый сигнал, который может быть включен или выключен, высокий или низкий, процент времени включения соответствует мгновенному напряжению синусоидальной волны.
Когда для управления асинхронным двигателем применяется электроника, становится доступно множество методов управления, от простых до сложных:
- Скалярное управление: Недорогой метод, описанный выше, для управления только напряжением и частотой без обратной связи.
- Векторное управление: Также известно как векторное управление фазой.Компоненты тока статора, создающие магнитный поток и крутящий момент, измеряются или оцениваются в режиме реального времени для улучшения кривой крутящего момента двигателя. Это требует больших вычислений.
- Прямое управление крутящим моментом: Продуманная адаптивная модель двигателя обеспечивает более прямое управление потоком и крутящим моментом без обратной связи. Этот метод быстро реагирует на изменения нагрузки.
- Многофазный асинхронный двигатель состоит из многофазной обмотки, встроенной в многослойный статор, и проводящей короткозамкнутой клетки, встроенной в многослойный ротор.
- Трехфазные токи, протекающие внутри статора, создают вращающееся магнитное поле, которое индуцирует ток и, следовательно, магнитное поле в роторе. Крутящий момент ротора развивается, когда ротор немного проскальзывает за вращающимся полем статора.
- В отличие от однофазных двигателей, многофазные асинхронные двигатели самозапускаются.
- Пускатели двигателей минимизируют нагрузку на линию питания, обеспечивая при этом больший пусковой крутящий момент, чем требуется во время работы.Снижение линейного тока Пускатели требуются только для больших двигателей.
- Трехфазные двигатели при запуске будут работать от однофазных.
- Статический преобразователь фазы — это трехфазный двигатель, работающий на одной фазе без нагрузки на вал, генерирующий трехфазный выходной сигнал.
- Несколько обмоток возбуждения можно перемонтировать для работы с несколькими дискретными скоростями двигателя, изменив количество полюсов.
Трехфазный двигатель может работать от однофазного источника питания.Однако он не запускается самостоятельно. Его можно запустить вручную в любом направлении, набрав скорость за несколько секунд. Он будет развивать только 2/3 номинальной мощности 3-φ, потому что одна обмотка не используется.
Рисунок 5.19 Двигатель 3-фазн. Питается от мощности 1-фазн., Но не запускается.Одинарная катушка однофазного двигателя
Одиночная катушка однофазного асинхронного двигателя создает не вращающееся магнитное поле, а пульсирующее поле, достигающее максимальной напряженности при электрическом напряжении 0 ° и 180 °.
Рисунок 5.20 Однофазный статор создает невращающееся пульсирующее магнитное полеДругая точка зрения состоит в том, что одиночная катушка, возбуждаемая однофазным током, создает два вектора магнитного поля, вращающихся в противоположных направлениях, совпадающих дважды за оборот при 0 ° (рисунок выше-a) и 180 ° (рисунок e). Когда векторы поворачиваются на 90 ° и -90 °, они отменяются на рисунке c. При 45 ° и -45 ° (рисунок b) они частично складываются по оси + x и сокращаются по оси y. Аналогичная ситуация существует на рисунке d.Сумма этих двух векторов — это вектор, стационарный в пространстве, но чередующийся во времени. Таким образом, пусковой крутящий момент не создается.
Однако, если ротор вращается вперед со скоростью немного меньшей, чем синхронная скорость, он будет развивать максимальный крутящий момент при 10% скольжении относительно вектора прямого вращения. Меньший крутящий момент будет развиваться выше или ниже 10% скольжения. Ротор будет испытывать скольжение на 200-10% относительно вектора магнитного поля, вращающегося в противоположных направлениях. Небольшой крутящий момент (см. Кривую зависимости крутящего момента от скольжения), за исключением двукратной пульсации частоты, создается вектором встречного вращения.Таким образом, однофазная катушка будет развивать крутящий момент после запуска ротора. Если ротор запускается в обратном направлении, он будет развивать такой же большой крутящий момент, поскольку он приближается к скорости вращающегося в обратном направлении вектора.
Однофазные асинхронные двигатели имеют медную или алюминиевую короткозамкнутую клетку, встроенную в цилиндр из стальных пластин, типичных для многофазных асинхронных двигателей.
Двигатель с постоянным разделением конденсаторов
Одним из способов решения проблемы с однофазным двигателем является создание двухфазного двигателя, получающего двухфазное питание от однофазного.Для этого требуется двигатель с двумя обмотками, разнесенными друг от друга на 90 ° , электрический, питаемый двумя фазами тока, смещенными во времени на 90 ° . Это называется конденсаторным двигателем с постоянным разделением.
Рисунок 5.21 Асинхронный двигатель с постоянным разделением конденсаторов Асинхронный двигатель с постоянным разделением конденсаторовЭтот тип двигателя подвержен увеличению величины тока и сдвигу во времени назад, когда двигатель набирает скорость, с пульсациями крутящего момента на полной скорости. Решение состоит в том, чтобы конденсатор (импеданс) оставался небольшим, чтобы минимизировать потери.Потери меньше, чем у двигателя с экранированными полюсами. Эта конфигурация двигателя хорошо работает до 1/4 лошадиных сил (200 Вт), хотя обычно применяется к двигателям меньшего размера. Направление двигателя легко изменить, включив конденсатор последовательно с другой обмоткой. Этот тип двигателя может быть адаптирован для использования в качестве серводвигателя, описанного в другом месте этой главы.
Рисунок 5.22 Однофазный асинхронный двигатель со встроенными катушками статораОднофазные асинхронные двигатели могут иметь катушки, встроенные в статор для двигателей большего размера.Тем не менее, меньшие размеры требуют меньшего количества сложностей для создания концентрированных обмоток с выступающими полюсами.
Асинхронный двигатель с конденсаторным пуском
На рисунке ниже конденсатор большего размера может использоваться для запуска однофазного асинхронного двигателя через вспомогательную обмотку, если он отключается центробежным переключателем, когда двигатель набирает обороты. Кроме того, во вспомогательной обмотке может быть намного больше витков из более тяжелого провода, чем в двигателе с разделенной фазой сопротивления, чтобы уменьшить чрезмерное повышение температуры.В результате для таких тяжелых нагрузок, как компрессоры кондиционеров, доступен больший пусковой крутящий момент. Эта конфигурация двигателя работает настолько хорошо, что доступна в многомощных (несколько киловаттных) размерах.
Рисунок 5.23 Асинхронный двигатель с конденсаторным пускомАсинхронный двигатель с конденсаторным двигателем
Вариант двигателя с конденсаторным пуском (рисунок ниже) заключается в запуске двигателя с относительно большим конденсатором для высокого пускового момента, но с оставлением конденсатора меньшего номинала на месте после запуска для улучшения рабочих характеристик, не потребляя чрезмерного тока.Дополнительная сложность конденсаторного двигателя оправдана для двигателей большего размера.
Рисунок 5.24 Асинхронный двигатель с конденсаторным двигателемПусковой конденсатор двигателя может быть неполярным электролитическим конденсатором с двойным анодом, который может представлять собой два последовательно соединенных поляризованных электролитических конденсатора + к + (или — к -). Такие электролитические конденсаторы переменного тока имеют такие высокие потери, что их можно использовать только в прерывистом режиме (1 секунда во включенном состоянии, 60 секунд в выключенном состоянии), например, при запуске двигателя. Конденсатор для работы двигателя должен быть не электролитической конструкции, а быть полимерного типа с меньшими потерями.
Асинхронный двигатель с двухфазным электродвигателем с сопротивлением
Если во вспомогательной обмотке намного меньше витков, меньший провод размещен под углом 90 ° ° к главной обмотке, он может запустить однофазный асинхронный двигатель. При более низкой индуктивности и более высоком сопротивлении ток будет испытывать меньший фазовый сдвиг, чем основная обмотка. Может быть получено около 30 ° разности фаз. Эта катушка создает умеренный пусковой крутящий момент, который отключается центробежным переключателем на 3/4 синхронной скорости.Эта простая (без конденсатора) конструкция хорошо подходит для двигателей мощностью до 1/3 лошадиных сил (250 Вт), управляющих легко запускаемыми нагрузками.
Рисунок 5.25 Сопротивление асинхронного двигателя с расщепленной фазойЭтот двигатель имеет больший пусковой крутящий момент, чем двигатель с экранированными полюсами (следующий раздел), но не такой большой, как двухфазный двигатель, построенный из тех же частей. Плотность тока во вспомогательной обмотке во время пуска настолько высока, что последующий быстрый рост температуры исключает частый перезапуск или медленные пусковые нагрузки.
Корректор коэффициента мощности Nola
Фрэнк Нола из НАСА предложил корректор коэффициента мощности для повышения эффективности асинхронных двигателей переменного тока в середине 1970-х годов. Он основан на предположении, что асинхронные двигатели неэффективны при нагрузке ниже полной. Эта неэффективность коррелирует с низким коэффициентом мощности. Коэффициент мощности меньше единицы возникает из-за тока намагничивания, необходимого для статора. Этот фиксированный ток составляет большую долю от общего тока двигателя при уменьшении нагрузки двигателя.При небольшой нагрузке полный ток намагничивания не требуется. Его можно уменьшить, уменьшив подаваемое напряжение, улучшив коэффициент мощности и КПД. Корректор коэффициента мощности определяет коэффициент мощности и снижает напряжение двигателя, тем самым восстанавливая более высокий коэффициент мощности и уменьшая потери.
Поскольку однофазные двигатели примерно в 2–4 раза менее эффективны, чем трехфазные двигатели, существует потенциальная экономия энергии для двигателей 1-φ. Для полностью нагруженного двигателя нет экономии, поскольку требуется весь ток намагничивания статора.Напряжение не может быть уменьшено. Но есть потенциальная экономия от менее чем полностью загруженного двигателя. Двигатель с номинальным напряжением 117 В переменного тока рассчитан на работу при напряжении от 127 В переменного тока до 104 В переменного тока. Это означает, что он не полностью загружен при работе при напряжении более 104 В переменного тока, например, при работе холодильника на 117 В переменного тока. Контроллер коэффициента мощности может безопасно снизить сетевое напряжение до 104–110 В переменного тока. Чем выше начальное напряжение в сети, тем больше потенциальная экономия. Конечно, если энергокомпания подаст напряжение ближе к 110 В переменного тока, двигатель будет работать более эффективно без каких-либо дополнительных устройств.
Любой практически неработающий однофазный асинхронный двигатель с 25% FLC или менее является кандидатом на использование PFC. Однако он должен работать большое количество часов в год. И чем больше времени он простаивает, как в пилораме, штамповочном прессе или конвейере, тем выше вероятность оплаты контроллера через несколько лет эксплуатации. За него должно быть втрое легче платить по сравнению с более эффективным 3-φ-двигателем. Стоимость PFC не может быть возмещена для двигателя, работающего всего несколько часов в день.
Резюме: Однофазные асинхронные двигатели
- Однофазные асинхронные двигатели не могут запускаться самостоятельно без вспомогательной обмотки статора, приводимой в действие противофазным током около 90 ° . После запуска вспомогательная обмотка необязательна.
- Вспомогательная обмотка конденсаторного двигателя с постоянным разделением каналов имеет конденсатор, включенный последовательно с ней во время запуска и работы.
- Асинхронный двигатель с конденсаторным запуском имеет только конденсатор, включенный последовательно со вспомогательной обмоткой во время запуска.
- Двигатель с конденсаторным питанием обычно имеет большой неполяризованный электролитический конденсатор, последовательно включенный со вспомогательной обмоткой для запуска, а затем меньший неэлектролитический конденсатор во время работы.
- Вспомогательная обмотка электродвигателя с расщепленным сопротивлением развивает разность фаз по сравнению с основной обмоткой во время запуска из-за разницы в сопротивлении.
Все, что вам нужно знать о пускателе двигателя с прямым включением (DOL)
Для запуска асинхронного двигателя требуются различные методы пуска, поскольку они потребляют больший пусковой ток.Чтобы предотвратить повреждение обмотки из-за сильного тока, используются различные типы пускателей.
Одной из простейших форм пускателя двигателя , который используется для асинхронных двигателей, является пускатель прямого включения. Он состоит из MCCB или автоматических выключателей, контактора и реле перегрузки для защиты. Он имеет очень специфический контактор, который является электромагнитным, и он может быть отключен тепловым реле перегрузки в случае аварии.
Обычно контактор управляется разными кнопками пуска и останова, а затем используется вспомогательный контакт на контакторе, который помещается поперек кнопки пуска для удержания контакта.
Теперь давайте поговорим о принципе работы Direct On Line Starter (DOL)
Итак, для начала контактор замыкается, подавая полное линейное напряжение на обмотки двигателя. Таким образом, сначала двигатель будет выделять очень высокий пусковой ток в течение короткого периода времени, магнитное поле в утюге и ток будут ограничены током заблокированного ротора, который присутствует в двигателе.
На следующем этапе двигатель развивает крутящий момент заблокированного ротора и начинает разгоняться до полной скорости. И, когда они это сделают, ток начнет падать, но не будет значительно падать, пока двигатель не наберет высокую скорость, обычно около 85% от синхронной скорости. Одной из функций конструкции двигателя является кривая пускового тока и напряжение на клеммах, а также она полностью не зависит от нагрузки двигателя.
Различные части стартеров DOLДеталь DOL — контактор
Присутствующие магнитные контакторы действуют как переключатели с электромагнитным управлением, которые обеспечивают безопасное и удобное средство для подключения ответвленных цепей.Они также используют электромагнитную энергию для включения переключателей. Электромагнит состоит из катушки с проволокой, размещенной на железном сердечнике.
Итак, здесь происходит следующее: когда ток течет через катушку, железо магнита намагничивается и притягивает железный стержень, известный как якорь. Когда прерывание тока протекает через катушку с проводом, это вызывает выпадение якоря из-за наличия воздушного зазора в магнитной цепи.
Магнитные двигатели линейного напряжения — это электромеханические устройства, которые обеспечивают безопасные, экономичные и удобные средства для запуска и остановки двигателей, а также имеют то преимущество, что ими можно управлять дистанционно.
Основная задача контактора — управлять оборудованием, в котором используются электродвигатели. Он состоит из катушки, которая подключена к звукам напряжения, и довольно часто для однофазных двигателей используются катушки 230 В, а для трехфазных катушек 415 В.
Реле перегрузки (защита от перегрузки)
Если говорить о защите от перегрузки, то она предназначена для электродвигателя и помогает предотвратить выгорание и обеспечить максимальный срок службы. Из-за перегрузки двигатель потребляет чрезмерный ток, что приводит к перегреву.
Как вы, возможно, знаете, поскольку изоляция обмотки двигателя ухудшается из-за перегрева, существуют установленные пределы рабочей температуры двигателя, которые предотвращают подобную ситуацию.
Реле перегрузки можно разделить на три части:
- Тепловое реле: Как следует из названия, тепловые реле перегрузки зависят от повышения температуры, которое вызывается током перегрузки, срабатывающим при срабатывании, и его можно разделить на плавящиеся сплавы и биметаллические элементы.
- Магнитное реле: они реагируют только на превышение тока и не зависят от температуры. Электронное реле
- : Этот вид электрического реле сочетает в себе высокую скорость отключения, возможность регулировки и простоту установки. Они идеальны для многих точных применений.