3. Регулирование скорости вращения асинхронного двигателя.
Неподвижная часть машины называется статор, подвижная – ротор. Сердечник статора набирается из листовой электротехнической стали и запрессовывается в станину. На рис. 2.1 показан сердечник статора в сборе. Станина (1) выполняется литой, из немагнитного материала. Чаще всего станину выполняют из чугуна или алюминия. На внутренней поверхности листов (2), из которых выполняется сердечник статора, имеются пазы, в которые закладывается трёхфазная обмотка (3). Обмотка статора выполняется в основном из изолированного медного провода круглого или прямоугольного сечения, реже – из алюминия.
Обмотка
статора состоит из трёх отдельных
частей, называемых фазами.
Начала фаз обозначаются буквами c1,c2,c3,
концы –c4,c

Рис. 2.1
Начала и концы фаз выведены на клеммник (рис. 2.2.а), закреплённый на станине. Обмотка статора может быть соединена по схеме звезда (рис. 2.2.б) или треугольник (рис. 2.2.в). Выбор схемы соединения обмотки статора зависит от линейного напряжения сети и паспортных данных двигателя. В паспорте трёхфазного двигателя задаются линейные напряжения сети и схема соединения обмотки статора. Например, 660/380, Y/∆. Данный двигатель можно включать в сеть с Uл=660В по схеме звезда или в сеть с Uл=380В – по схеме треугольник.
Основное назначение обмотки статора – создание в машине вращающего магнитного поля.

Рис. 2.2
СКОРОСТЬ АСИНХРОННОГО ДВИГАТЕЛЯ МОЖНО РЕГУЛИРОВАТЬ изменением какой-либо из трех величин: числа пар полюсов р; частоты f1 тока питающей сети; скольжения S.
Изменение числа пар полюсов на статоре электродвигателя
Изменение числа полюсов электродвигателя. Для возможности изменения числа пар полюсов электродвигателя статор его выполняют либо с двумя самостоятельными трехфазными обмотками, либо с одной трехфазной обмоткой, которую можно пересоединять на различные числа полюсов.
На рисунке схематически показаны две катушки одной фазы, соединенные последовательно. Катушки создают четыре магнитных полюса. Те же катушки, соединенные параллельно между собой, создадут только два полюса (рис. б). Пересоединение обмоток статора производится при помощи специального аппарата – контроллера. При этом способе регулировка скорости вращения двигателя совершается скачками.
На практике встречаются двигатели, синхронные скорости вращения no которых могут быть равны 3000, 1500, 1000 и 750 оборотов в минуту.
Регулировку скорости вращения двигателя путем изменения числа полюсов можно производить только у асинхронных двигателей с короткозамкнутым ротором. Ротор с короткозамкнутой обмоткой может работать при разных числах полюсов магнитного поля. Наоборот, ротор двигателя с фазной обмоткой может работать нормально лишь при определенном числе полюсов поля статора. Иначе обмотку ротора также пришлось бы переключать, что внесло бы большие усложнения в схему двигателя.
Изменение частоты переменного тока. При этом способе частоту переменного тока, подводимого к обмотке статора двигателя, изменяют при помощи специального преобразователя частоты. Регулировку изменения частоты тока выгодно производить, когда имеется большая группа двигателей, требующих совместного плавного регулирования скорости вращения (рольганги, текстильные станки и т. п.). Этот способ регулирования скорости мало распространен ввиду сложности его осуществления.
Введение сопротивления в цепь ротора. Первые два способа регулировки скорости вращения асинхронного двигателя требуют или специального исполнения двигателя, или наличия специального преобразователя частоты и поэтому широкого распространения не получили. Третий способ регулировки скорости вращения асинхронных двигателей состоит в том, что во время работы двигателя в цепь обмотки ротора вводят сопротивление регулировочного реостата.
С увеличением активного сопротивления цепи ротора возрастает величина скольжения S, соответствующая заданному значению вращающего момента М (величина вращающего момента, развиваемого двигателем, равна моменту сопротивления на валу двигателя). Таким образом, вводя дополнительно активное сопротивление в цепь фазного ротора, мы увеличиваем скольжение S и, следовательно, снижаем скорость вращения ротора n. Такой способ регулирования применим только для асинхронных двигателей с фазным ротором. Регулировочный реостат включают в цепь ротора так же, как и пусковой реостат. Разница между пусковым и регулировочным реостатом состоит в том, что регулировочный реостат рассчитан на длительное прохождение тока. Для двигателей, у которых производится регулировка скорости вращения путем изменения сопротивления в цепи ротора, пусковой и регулировочный реостаты объединяются в один пускорегулировочный реостат. Недостатком этого способа регулирования является то, что в регулировочном реостате происходит значительная потеря мощности, тем большая, чем шире регулировка скорости вращения двигателя.
Реверсирование асинхронных электродвигателей. Для изменения направления вращения (реверсирование) асинхронного двигателя следует поменять местами два любых провода из трех, идущих к обмоткам статора двигателя. При этом меняется направление вращения магнитного поля статора и двигатель станет вращаться в другую сторону. Реверсирование двигателя может быть произведено при помощи переключателя (перекидного рубильника), магнитного пускателя и других устройств.
Торможение асинхронных двигателей.
Торможение электродвигателей может быть механическим, электрическим и электромеханическим. Электромеханическое торможение производится при помощи ленточного или колодочного тормоза, действующего на тормозной шкив, закрепленный на валу двигателя. Ослабление ленты или колодок осуществляется тормозным электромагнитом, обмотка которого соединена параллельно с обмоткой статора двигателя.
Если при работе двигателя переключить две любые фазы, то при этом двигатель начнет развивать вращающий момент, направленный в обратную сторону. Вращение ротора замедляется. Когда скорость вращения приближается к нулю, следует отключить двигатель от сети, в противном случае под действием развиваемого момента он начнет вращаться в противоположном направлении. Применяются и другие способы электрического торможения асинхронных электродвигателей.
билеты_ЭМ / 39.Основные способы регулирования скорости асинхронного двигателя. Достоинства и недостатки каждого способа
3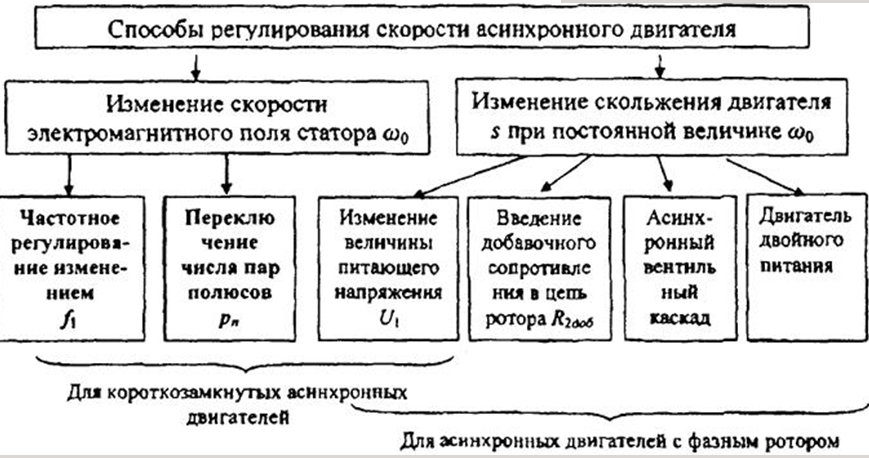 9)
Основные способы регулирования скорости
асинхронного двигателя. Достоинства и
недостатки каждого способа
9)
Основные способы регулирования скорости
асинхронного двигателя. Достоинства и
недостатки каждого способа
Рис.1. Классификация способов регулирования асинхронных двигателей Исходя из (1) принципиально возможны два способа регулирования скорости: регулирование скорости вращения поля статора и регулирование скольжения при постоянной величине ω0:
Скорость вращения поля статора определяется двумя параметрами (см.3.3): частотой напряжения, подводимого к обмоткам статора f1, и числом пар полюсов двигателя рп. В соответствии с этим возможны два способа регулирования скорости: изменение частоты питающего напряжения посредством преобразователей частоты, включаемых в цепь статора двигателя (частотное регулирование), и путем изменения числа пар полюсов двигателя. Регулирование скольжения двигателя при постоянной скорости вращения поля статора для короткозамкнутых асинхронных двигателей возможно путем изменения величины напряжения статора при постоянной частоте этого напряжения. Для асинхронных двигателей с фазным ротором, кроме того, возможны еще два способа: введение в цепь ротора добавочных сопротивлений (реостатное регулирование) и введение в цепь ротора добавочной регулируемой э.д.с. посредством преобразователей частоты, включаемых в цепь ротора (асинхронный вентильный каскад и двигатель двойного питания).
В настоящее время благодаря развитию силовой преобразовательной техники созданы и серийно выпускаются различные виды полупроводниковых преобразователей частоты, что определило опережающее развитие и широкое применение частотно-регулируемого асинхронного электропривода. Основными достоинствами этой системы регулируемого электропривода являются:
-плавность регулирования и высокая жесткость механических характеристик, что позволяет регулировать скорость в широком диапазоне;
— экономичность регулирования, определяемая тем, что двигатель работает с малыми величинами абсолютного скольжения, и потери в двигателе не превышают номинальных;
Недостатками частотного регулирования являются сложность и высокая стоимость (особенно для приводов большой мощности) преобразователей частоты и сложность реализации в большинстве схем режима рекуперативного торможения.
Подробно принципы и схемы частотного регулирования скорости асинхронного двигателя рассмотрены ниже.
Изменение скорости переключением числа пар полюсов асинхронного двигателя позволяет получать несколько (от 2 до 4) значений рабочих скоростей, т.е. плавное регулирование скорости и формирование переходных процессов при этом способе невозможно.
Поэтому данный способ имеет определенные области применения, но не может рассматриваться, как основа для построения систем регулируемого электропривода.
1
Регулирование скорости асинхронного двигателя изменением частоты тока статора
Изменяющийся
по частоте  ток статора приводит к изменению угловой
скорости поля статора
ток статора приводит к изменению угловой
скорости поля статора

и
пропорционально изменяется скорость
ротора. Из выражения (1-1) следует, что
регулирование скорости двигателя
изменением скорости вращающегося
магнитного поля статора  происходит без значительного изменения
скольжения и позволяет получать различные
скорости на жестких механических
характеристиках.
происходит без значительного изменения
скольжения и позволяет получать различные
скорости на жестких механических
характеристиках.
С
помощью электромашинных и полупроводниковых
устройств можно плавно изменять частоту
тока статора  ,
а следовательно и скорость двигателя.
Скорость двигателя можно увеличить
вверх до
,
а следовательно и скорость двигателя.
Скорость двигателя можно увеличить
вверх до
 от номинальной и уменьшать в
от номинальной и уменьшать в раз от номинальной.
раз от номинальной.
Верхний предел скорости ограничивается механической прочностью ротора, нижний – особенностями роботы преобразователей частоты.В настоящее время наиболее целесообразно применение тиранзисторных преобразователей частоты, в которых происходит сначала выпрямление переменного тока частоты сети, а затем инвертирование в переменный ток нужной частоты.
Для
сохранения постоянной (неизменной)
перегрузочной способности двигателя
на всех скоростях и поддержания постоянных
значений КПД и  ,
одновременно с изменением частоты тока,
необходимо изменять напряжение,
подводимое к двигателю.
,
одновременно с изменением частоты тока,
необходимо изменять напряжение,
подводимое к двигателю.
Перегрузочная
способность лвигателя не будет изменяться
при изменении частоты тока статора,
если отношение критических моментов
двигателя  при всех частотах тока
при всех частотах тока и соответствующих напряжениях
и соответствующих напряжениях будет равно отношению соответствующих
статических моментов нагрузки
будет равно отношению соответствующих
статических моментов нагрузки .
.
 (16-12)
(16-12)
Подставим в уравнение (16-12) значения критических моментов из известного ранее соотношения:

И получим:
После преобразования получим (1-3):
Где
:  – статические моменты при скоростях,
соответствующих частотам
– статические моменты при скоростях,
соответствующих частотам и
и ;
;
 и
и  напряжения при тех же частотах тока
статора.
напряжения при тех же частотах тока
статора.
Из
уравнения (16-13) следует, что с изменением
частоты  нужно так же изменить и величину
подводимого к двигателю напряжения
нужно так же изменить и величину
подводимого к двигателю напряжения .
Т.е.для
каждой частоты
.
Т.е.для
каждой частоты  необходимо соответствующее этой частоте
напряжение
необходимо соответствующее этой частоте
напряжение  .
.
Закон изменения напряжения определяется характером зависимости статического момента от скорости.
Если пренебречь моментом холостого хода рабочего механизма, то уравнение статического момента можно записать в виде

Подставив значения статических моментов (16-14) в уравнение (16-13) получим
 (16-15)
(16-15)
откуда 
где
: – относительная частота напряжения,
подаваемого на статор двигателя;
– относительная частота напряжения,
подаваемого на статор двигателя;
 –показатель
степени, определяющий закон изменения
напряжения с изменением частоты тока
статора.
–показатель
степени, определяющий закон изменения
напряжения с изменением частоты тока
статора.
С
изменением частоты тока будут изменяться
синхронная скорость поля статора  и индуктивные сопротивления обмоток
двигателя.
и индуктивные сопротивления обмоток
двигателя.
Двигатель будет развивать критический момент при критическом скольжении для данной частоты тока


Рассмотрим регулирование напряжения для наиболее распространенных законов изменения нагрузки.
1.Статический момент не изменяется с изменением скорости

При этом уравнение (1-5)

при 

обозначим  – постоянный коэффициент
– постоянный коэффициент
и
получим 
или 
Из
( )
следует, что подводимое к двигателю
напряжение должно изменятся пропорционально
изменению частоты тока, для сохранения
постоянного отношения
)
следует, что подводимое к двигателю
напряжение должно изменятся пропорционально
изменению частоты тока, для сохранения
постоянного отношения .
При этом критический момент
.
При этом критический момент (в соответствии с (16-18)) остается без
изменений, то есть обеспечивается
постоянная перегрузочная способность
двигателя.
(в соответствии с (16-18)) остается без
изменений, то есть обеспечивается
постоянная перегрузочная способность
двигателя.
Соответствующие изменения напряжения при частотном регулировании обуславливаются необходимостью сохранения величины магнитного потока при разных частотах тока статора.
Если
пренебречь падением напряжения в обмотке
статора то можно считать, что сщгласно
уравнению 14-15 [  ]
]

Откуда
получаем отношение
,
пропорционально потоку ,
который должен оставаться постоянным
,
который должен оставаться постоянным

Если
нарушить это условие, т.е. при  изменять только частоту тока статора
изменять только частоту тока статора ,
то:
,
то:
а)
с уменьшением частоты тока статора  ,
поток
,
поток будет увеличиваться, это вызоветувеличение
потерь от намагничивающего тока;
будет увеличиваться, это вызоветувеличение
потерь от намагничивающего тока;
б)
с увеличением частоты тока статора  ,
поток
,
поток уменьшиться, что при неизменном
уменьшиться, что при неизменном – статическом моменте сопротивления
механизма, вызовет увеличение сопротивления
току ротора, (соответственно рост
температуры).
– статическом моменте сопротивления
механизма, вызовет увеличение сопротивления
току ротора, (соответственно рост
температуры).
Таким образом, в обоих случаях двигатель будет перегреваться при моменте на валу, даже меньшем номинального значения.
Из
уравнения
(1-8) следует, что при постоянном статическом
моменте  ,
, ,
критический момент остается неизменным
,
критический момент остается неизменным ,
а критическое скольжение
,
а критическое скольжение увеличивается с уменьшением частоты,
это вызвано уменьшением индуктивного
сопротивления
увеличивается с уменьшением частоты,
это вызвано уменьшением индуктивного
сопротивления пропорционально
пропорционально .
. .
.
При увеличении критического скольжения критический момент наблюдается при меньшей скорости ротора.
При
низких частотах индуктивное сопротивление  становится соизмеримым с независящим
от частоты активным сопротивлением
статора
становится соизмеримым с независящим
от частоты активным сопротивлением
статора .
И при низких частотах,падение
напряжения на сопротивлении
.
И при низких частотах,падение
напряжения на сопротивлении  более
чувствительно снижает значение магнитного
потока и вызывает уменьшение критического
момента двигателя (кривая
более
чувствительно снижает значение магнитного
потока и вызывает уменьшение критического
момента двигателя (кривая  ина рис.1-1).
ина рис.1-1).

Рис.
1-1 Механическая характеристика
асинхронного двигателя при частотном
регулировании и  ,
, .
.
При
малых значениях индуктивности  значительно увеличивается критическое
скольжение. Поэтому для поддержания
постоянного критического момента при
малых частотах напряжения снижают
медленней, чем частоту тока статора.
(Пунктирные кривые для
значительно увеличивается критическое
скольжение. Поэтому для поддержания
постоянного критического момента при
малых частотах напряжения снижают
медленней, чем частоту тока статора.
(Пунктирные кривые для и
и ).
).
Cпособы регулирования скорости асинхронного двигателя
Асинхронные двигатели переменного тока являются самыми применяемыми электродвигателями абсолютно во всех хозяйственных сферах. В их преимуществах отмечается конструктивная простота и небольшая цена. При этом немаловажное значение имеет регулирование скорости асинхронного двигателя. Существующие способы показаны ниже.
Согласно структурной схеме скоростью электродвигателя можно управлять в двух направлениях, то есть изменением величин:
- скорость электромагнитного поля статора;
- скольжение двигателя.
Первый вариант коррекции, используемый для моделей с короткозамкнутым ротором, осуществляется за счет изменения:
- частоты,
- количества полюсных пар,
- напряжения.
В основе второго варианта, применяемого для модификации с фазным ротором, лежат:
- изменение напряжения питания;
- присоединение элемента сопротивления в цепь ротора;
- использование вентильного каскада;
- применение двойного питания.
Вследствие развития силовой преобразовательной техники на текущий момент в широком масштабе изготовляются всевозможные виды частотников, что определило активное применение частотно-регулируемого привода. Рассмотрим наиболее распространённые методы.
Частотное регулирование
Всего десять лет назад в торговой сети регуляторов частоты вращения скорости ЭД было небольшое количество. Причиной тому служило то, что тогда ещё не производились дешёвые силовые высоковольтные транзисторы и модули.
На сегодня частотное преобразование – самый распространённый способ регулирования скорости двигателей. Трёхфазные преобразователи частоты создаются для управления 3-фазными электродвигателями.
Однофазные же двигатели управляются:
- специальными однофазными преобразователями частоты;
- 3-фазными преобразователями частоты с устранением конденсатора.
Схемы регуляторов оборотов асинхронного двигателя
Для двигателей повседневного предназначения легко можно выполнить необходимые расчеты, и своими руками произвести сборку устройства на полупроводниковой микросхеме. Пример схемы регулятора электродвигателя приведён ниже. Такая схема позволяет добиться контроля параметров приводной системы, затрат на техническое обслуживание, снижения потребления электричества наполовину.
Принципиальная схема регулятора оборотов вращения ЭД для повседневных нужд значительно упрощается, если применить так называемый симистор.
Обороты вращения ЭД регулируются с помощью потенциометра, определяющего фазу входного импульсного сигнала, открывающего симистор. На изображении видно, что в качестве ключей применяются два тиристора, подключённых встречно-параллельно. Тиристорный регулятор оборотов ЭД 220 В достаточно часто применяется для регулирования такой нагрузки, как диммеры, вентиляторы и нагревательная техника. От оборотов вращения асинхронного ЭД зависят технические показатели и эффективность работы двигательного оборудования.
Заключение
На технорынке сегодня предлагаются в большом ассортименте регуляторы и частотные преобразователи для асинхронных электродвигателей переменного тока.
Управление способом варьирования частоты на данный момент – самый оптимальный способ, т. к. он позволяет плавно регулировать скорость асинхронного ЭД в широчайшем диапазоне, без значительных потерь и снижения перегрузочных способностей.
Тем не менее, на основе расчёта, можно самостоятельно собрать простое и эффективное устройство с регулированием оборотов вращения однофазных электродвигателей с помощью тиристоров.
Параметрическое регулирование скорости асинхронного двигателя.
 ;
; .
.
Способы параметрического регулирования скорости асинхронного двигателя видны из анализа механической характеристики двигателя.
К параметрическим способам регулирования относятся:
Способ изменения активного сопротивления в цепях статора и ротора.
Реостатное регулирование изменением реактивного сопротивления в цепях ротора и статора.
Изменение числа пар полюсов.
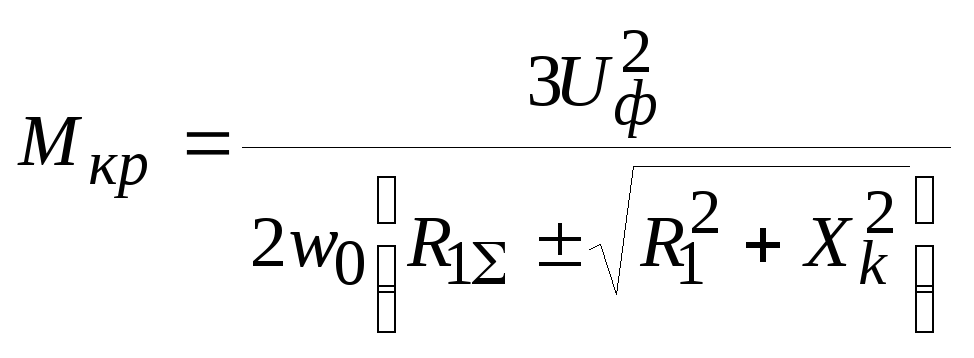
Критическое скольжение
 ;
;
При введении сопротивления в цепь обмоток фаз ротора меняется критическое скольжение, а критический момент остается постоянным.
Если мы принимаем приведенный ток ротора I‘2=const, то, как видно из выражения тока ротора, между скольжением и сопротивлением существует линейная зависимость
 ;
; ; где
; где — постоянно.
— постоянно.
 ;
; —
изменение сопротивления в цепи ротора.
—
изменение сопротивления в цепи ротора.
Механические характеристики могут записаться следующим образом:
 ;
; ;
; ;
;
 ;
; .
.
Отметим, что cosасинхронного двигателя при реостатном регулировании скорости двигателя изменением сопротивления в цепи ротора и в случае постоянного момента не изменяется и это следует из следующего выражения
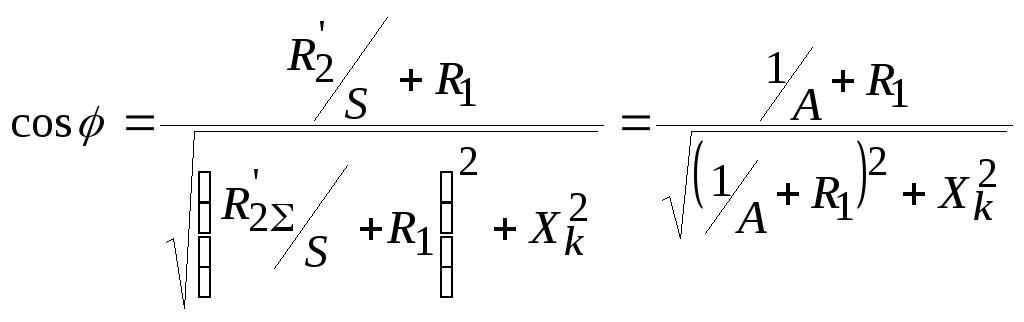 .
.
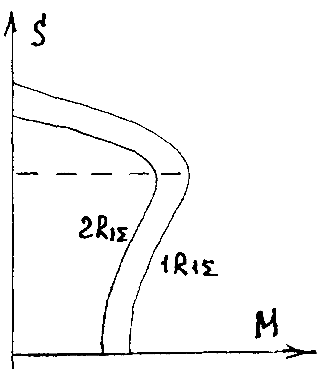
Реостатное регулирование асинхронного двигателя изменением сопротивления в цепи статора.

 ;
;
1R1>2R1
Из механической характеристики видно, что с увеличением дополнительного активного сопротивления статора уменьшается критический момент, максимальный момент, критическое скольжение и это приводит к сужению рабочего участка и к снижению жесткости.
 ;
;
Sне=0,020,13
Регулирование скорости асинхронного двигателя. Изменение числа пар полюсов.
Этот
способ применяется для короткозамкнутых
двигателей. Регулирование скорости
ступенчатое. Принцип такого способа
регулирования видно из применения
скорости идеального холостого хода  .
.
Для изменения числа пар полюсов необходимо, чтобы в пазы статора были вложены независимые обмотки с разными значениями числа пар полюсов, либо при одной обмотке имелась бы возможность изменять ее схему соединения.
Изменение числа пар полюсов за счет нескольких независимых обмоток приводит к повышенным габаритам двигателя, но при этом возможно любое соотношение числа пар полюсов двигателя. Как правило, многоскоростной двигатель выполнен с двумя независимыми обмотками с отношением числа пар полюсов от 3:1 до 12:1.
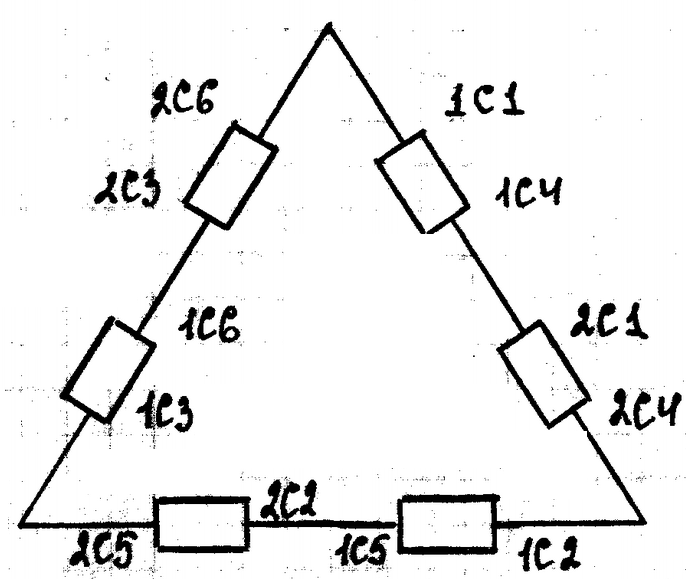
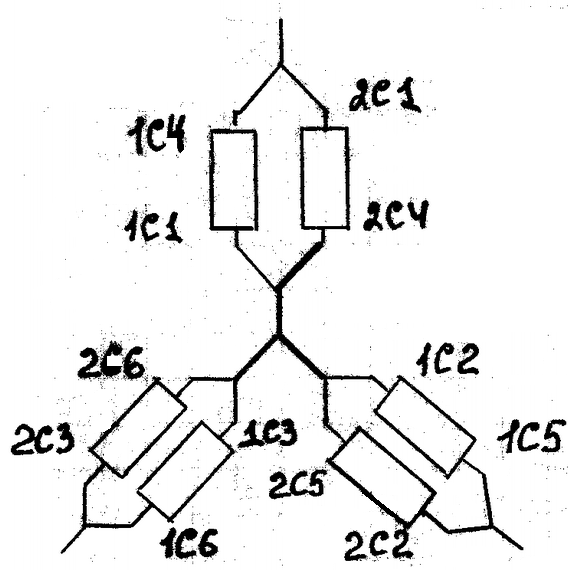
Для двигателей с переключением числа пар полюсов и изменением схемы обмотки статора каждой фазы, обмотка состоит из двух частей, в одной из которых меняется направление тока путем переключения этих частей согласно последнему соединению на встречно-последовательное или встречно-параллельное соединение. Такое переключение приводит к уменьшению числа пар полюсов вдвое, но скорость возрастает в два раза.
w0II=w0III=2w0I
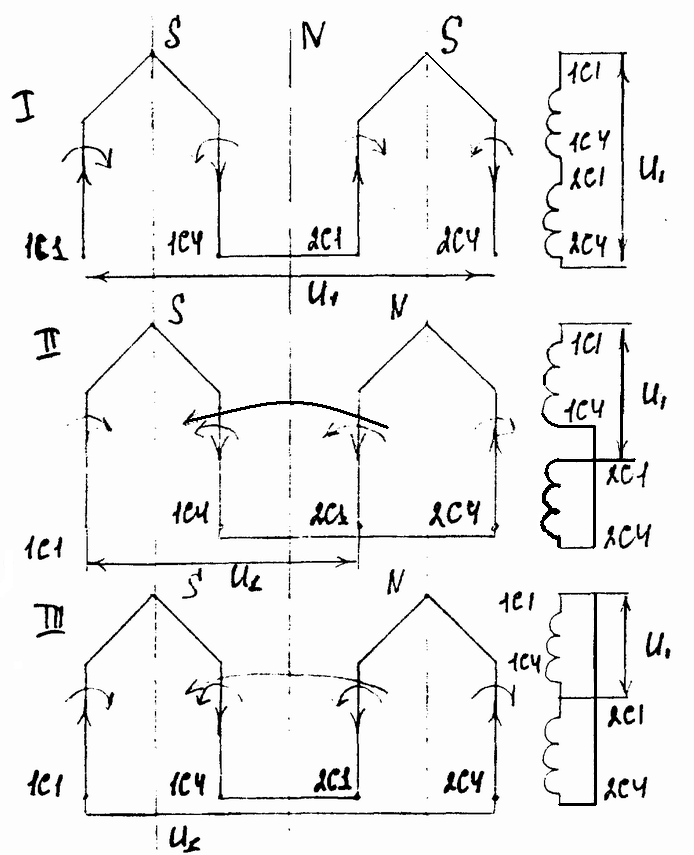
При допустимом токе секции равная номинальная мощность для всех соединений будет следующая:
PдопI=3U1I1нcosI– последовательное согласное;
PдопII=3U1I1нcosII– последовательное встречное;
PдопIII=3U12I1нcosIII– последовательное параллельное.
Допустимый момент
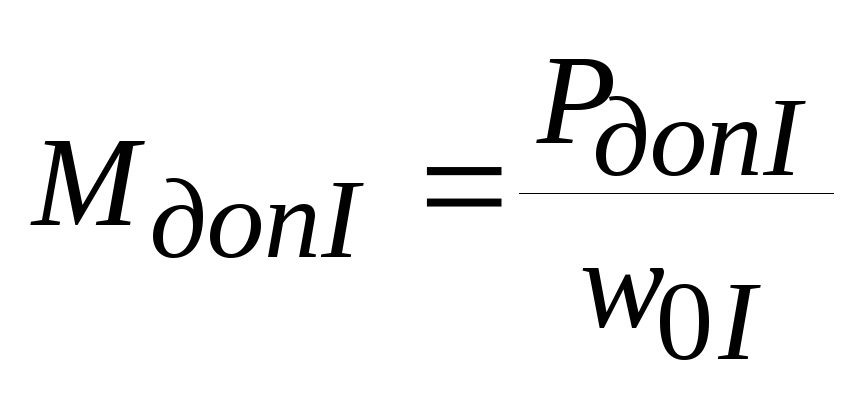 ;
;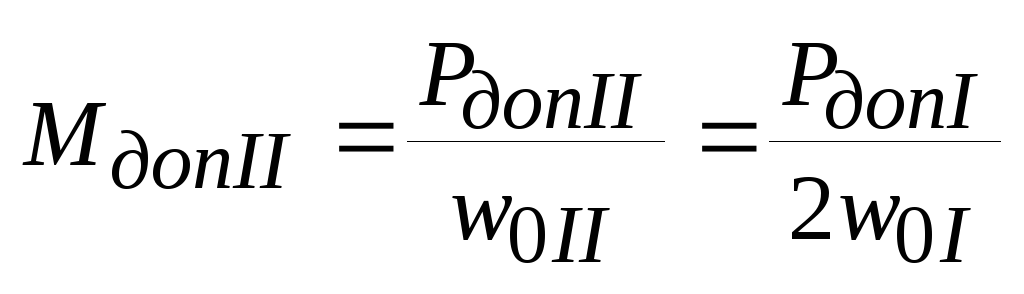 ;
; .
.
Из полученного выражения видно, что с уменьшением числа пар полюсов с переходом с согласно-последовательного включения на встречно-последовательное включение, допустимая мощность остается постоянной, т.е. регулирование скорости производится при постоянной мощности. Тогда как при увеличении скорости перехода согласно- последовательного включения на параллельное включение, допустимый момент не изменяется, т.е. регулирование идет с постоянным моментом.

 ;
;
 ;
;
 .
.
 ;
; .
.
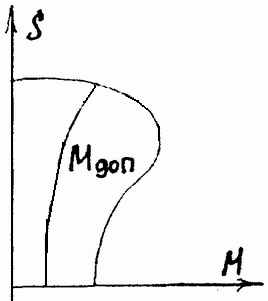
Механические характеристики.
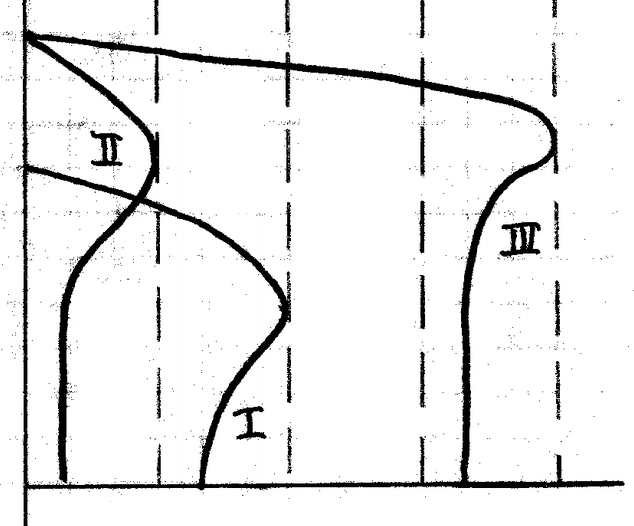

При параллельном соединении перегрузочная способность растет вдвое. Наибольшее практичное применение получили схемы переключения со звезды на двойную звезду и переключение с треугольника на двойную звезду.

Переключение с треугольника на двойную звезду. Характеристики аналогичны схеме переключения согласно-последовательного включения на параллельное, т.е. идет регулирование при постоянном моменте.
Допустимая мощность:
 ;
;
РдопРдоп,т.к.cosтреугольника за счет потребления реактивной энергии больше.
coscosза счет потребления реактивной энергии.
 ;
; ;
; .
.
 ;
; ;
;
 ;
; ;
; .
.

Из всех параметрических способов регулирования скорости изменение числа пар полюсов наиболее прост для практической реализации, и наиболее экономичен, так как в нем значительно меньше максимальные потери скольжения.
3. Регулирование скорости вращения асинхронных двигателей с фазным ротором
Для двигателей с фазным ротором можно в принципе использовать все те же способы регулирования скорости вращения, как и для двигателей с короткозамкнутым ротором. Однако на практике из числа этих способов для двигателей с фазным ротором применяется только способ регулирования скорости вращения с помощью реакторов насыщения. Ниже рассмотрим способы регулирования скорости вращения, которые специфичны для двигателей с фазным ротором и в которых используется возможность включения регулирующих устройств во вторичную цепь.
Регулирование скорости вращения с помощью реостата в цепи ротора производится по той же схеме рис. 28-3, что и реостатный пуск двигателя, но реостат при этом должен быть рассчитан на длительную работу. При увеличении активного сопротивления вторичной цепи вид механической характеристики двигателя изменяется (см. рис. 28-4; а): характеристика становится более мягкой и скольжение двигателя при том же моменте нагрузки Мст увеличивается.
При Мст=const рабочее скольжение s с большой точностью пропорционально sт и, следовательно, активному сопротивлению цепи ротора. Поэтому скольжения s и s’, соответствующие случаям rд = 0 и rд? 0, находятся в соотношении
,
откуда значение rд, необходимое для получения скольжения s’, равно
. (28-8)
Рассматриваемый способ регулирования скорости связан со значительными потерями энергии в сопротивлении гд и поэтому малоэкономичен. Он применяется главным образом при кратковременной или повторно-кратковременной работе (например, пуско-наладочные режимы некоторых машин, крановые устройства и пр.), а также в приводах с вентиляторным моментом. В последнем случае мощность на валу с уменьшением скорости быстро снижается, и поэтому мощность скольжения и потери в цепи ротора ограничены.
К недостаткам реостатного регулирования скорости относятся также мягкость механических характеристик и зависимость диапазона регулирования от нагрузки. В частности, регулирование скорости на холостом ходу практически невозможно.
Регулирование скорости вращения посредством введения добавочной э. д. с. во вторичную цепь двигателя.
Регулирование скорости вращения асинхронного двигателя путем увеличения его скольжения всегда связано с выделением во вторичной цепи двигателя значительной электрической мощности скольжения
большая часть которой при реостатном регулировании теряется ‘в реостате. Поэтому, естественно, возникает мысль о полезном использовании этой мощности и о повышении таким образом к. п. д. установки.
Полезное использование мощности скольжения возможно, если вместо реостата присоединить к контактным кольцам фазного двигателя приемник электрической энергии в виде подходящей для этой цели вспомогательной электрической машины.
Эта машина будет работать в режиме двигателя и оказывать воздействие на регулируемый асинхронный двигатель, развивая напряжение на его вторичных зажимах, так как при вращении вспомогательной машины в ее якоре индуктируется э. д. с. Можно также сказать, что задачей вспомогательной машины, как и реостата при реостатном регулировании, является создание «подпора» напряжения на контактных кольцах регулируемого асинхронного двигателя, ибо наличие определенного напряжения на кольцах U2к— непременное условие выдачи с этих колец определенной мощности
во внешнюю цепь двигателя. Вместе с тем, вспомогательная машина в отличие от реостата позволяет полезно использовать эту мощность.
Прежде всего рассмотрим вопрос о влиянии на работу фазного асинхронного двигателя внешней добавочной э. д. с. Ед, вводимой во вторичную цепь двигателя с помощью его контактных колец, при условии, что частота этой добавочной э. д. с. всегда равна частоте вторичного тока и э. д. с. f2 = sf1 самого двигателя.
На рис. 28-13, а изображена векторная диаграмма вторичной цепи асинхронного двигателя при Ед = 0. Вторичный ток двигателя
‘ (28-9)
имеет значение, необходимое для создания нужного электромагнитного момента М в соответствии с моментом нагрузки Мст на валу.
Если теперь во вторичную цепь ввести э. д. с. Ед встречно э. д. с. скольжения Е2s. в этой же цепи, то вторичный ток
(28-10)
в первый момент времени уменьшится. Поэтому развиваемый двигателем момент М также уменьшится, двигатель начнет тормозиться, а скольжение s — увеличиваться. При этом, согласно равенству (28-10), ток I2, а вместе с ним и момент М будут увеличиваться. Это будет происходить до тех пор, пока опять не наступит равновесие моментов М = Мст на валу. Двигатель при этом будет работать с увеличенным скольжением s, а векторная диаграмма вторичной цепи приобретет вид, изображенный на рис. 28-13, б. Очевидно, что посредством регулирования величины Ед можно регулировать величину s и, следовательно, скорость вращения двигателя.
Предположим теперь, что э. д. с. Ед имеет по сравнению с рассмотренным случаем противоположное направление и совпадает по фазе с э. д. с. на рис. 28-13. а. Тогда вместо выражения (28-9) получим
В первый момент после введения э. д. с. Ек ток I2 и момент М возрастут, двигатель будет ускоряться и s будет уменьшаться. При достаточном значении Ед скольжение s уменьшится до нуля, и если ток I2, создаваемый в этом случае только за счет действия Ед, все еще будет велик по сравнению с током, необходимым для создания момента М = Мст, то ускорение двигателя будет продолжаться и скорость превысит синхронную. Скольжение s и э. д. с. при этом изменят знаки и будут расти по абсолютной величине до тех пор, пока в соответствии с выражением (28-11) ток не упадет до необходимого значения. При s<0 угол — отрицательный и векторная диаграмма вторичной цепи двигателя имеет вид, показанный на рис. 28-13, в. Ток I2 при этом будет иметь составляющую, совпадающую с Ф. Поэтому намагничивающий ток, потребляемый из первичной цепи, уменьшится и двигателя повысится.
Таким образом, с помощью добавочной э. д. с. Ед, путем изменения ее значения и направления, можно осуществить, плавное двухзонное регулирование скорости двигателя: ниже и выше синхронной.
Если пренебречь потерями, то мощность источника добавочной э. д. с. равна мощности скольжения sРэм, причем при s > 0 этот источник является приемником и потребляет энергию из вторичной цепи двигателя, а при s < 0 — генератором и отдает мощность во вторичную цепь двигателя. Механическая мощность, развиваемая магнитным полем двигателя, при s > 0 будет меньше Рэм, а при s < 0 в соответствии с изменением знака мощности скольжения Рмх > Рэм.
Каскад асинхронного двигателя с машиной постоянного тока.
Реализация рассмотренного способа регулирования скорости вращения асинхронного двигателя посредством добавочной э, д. с. осуществляется в каскадных соединениях двигателя со вспомогательными электрическими машинами. Рассмотрим здесь каскадные соединения асинхронного двигателя с машиной постоянного тока. На рис. 28-14, а показана схема каскада фазного асинхронного двигателя АД, приводящего в движение некоторую рабочую машину РМ, с машиной постоянного тока независимого возбуждения — МПТ. Цепь якоря МПТ приключена к контактным кольцам асинхронного двигателя через ионный или полупроводниковый выпрямитель В, соединенный по трехфазной мостовой схеме.
Выпрямитель преобразовывает переменный ток частоты скольжения f2 = sf1 во вторичной цепи АД в постоянный ток в цепи якоря МПТ. Э. д. с. якоря МПТ в данном случае и является той рассмотренной выше добавочной э. д. с. Ед, которая (в данном случае с помощью выпрямителя В) вводится во вторичную цепь двигателя АД. Регулирование этой э. д. с. и скорости вращения АД производится путем регулирования тока побуждения МПТ.
На схеме рис. 28-14, а машина постоянного тока МПТ расположена на валу асинхронного двигателя АД. Она преобразовывает мощность скольжения Рs, потребляемую из вторичной цепи АД, в механическую мощность, которая через вал двигателя АД вместе с механической мощностью Рмх двигателя передается рабочей машине РМ. Такой каскад называется электромеханическим. Если при регулирований скорости вращения обеспечить полное использование мощности АД (Р1 = Рн = const) и пренебречь потерями, то в этом каскаде мощность, передаваемая рабочей машине РМ,
также остается при всех скоростях постоянной и равной номинальной мощности. В связи с этим электромеханический каскад иногда условно называют также каскадом постоянной мощности. Необходимая номинальная мощность вспомогательной машины каскада (в данном случае МПТ) зависит от пределов регулирования скорости:
Каскад с выпрямителями допускает регулирование скорости только вниз от синхронной (s>0). Если заменить выпрямитель управляемым ионным или полупроводниковым преобразователем, способным производить также обратное преобразование —постоянного тока в переменный, то можно осуществить регулирование скорости вверх от синхронной (s<0). Указанные на рис. 28-14 направления передачи мощности скольжения при s > 0 изменятся на обратные. Ввиду сложности системы управления таким преобразователем и некоторых других причин эти каскады до сих пор применения не получили. Ранее применялись также каскады, выполненные по схеме рис. 28-14, а, в которой вместо выпрямителя использовался одноякорный преобразователь переменного тока в постоянный .
На рис. 28-14, б изображена схема каскада, которая отличается от схемы рис. 28-14, а тем, что МПТ соединена механически со вспомогательной асинхронной или синхронной машиной ВМ. В этом каскаде мощность скольжения Рs при s > 0 передается с помощью ВМ, работающей в режиме генератора, обратно в сеть переменного тока. При s<0 ВМ работает в режиме двигателя. Такой каскад называется электрическим. В этом каскаде машине РМ передается только механическая мощность двигателя АД
которая при Р1 = Рн = const уменьшается пропорционально скорости вращения. Момент на валу РМ при этом остается постоянным, вследствие чего такой каскад иногда условно называют каскадом с постоянным моментом. Машины ВМ и МПТ на схеме рис. 28-14, б можно заменить трансформатором и полупроводниковым преобразователем постоянного тока в переменный и обратно.
Каскады позволяют осуществить экономичное и плавное регулирование скорости вращения асинхронного двигателя, однако вспомогательные машины и преобразователи удорожают установку. Поэтому каскады целесообразно применять только для привода мощных производственных механизмов, требующих регулирования скорости в достаточно широких пределах (например, прокатные станы, весьма мощные вентиляторы и др.). Рассмотренные выше каскадные соединений в связи с использованием в них ионных или полупроводниковых вентилей называют также вентильными каскадами.
Существуют также другие системы каскадов, в частности с использованием коллекторных машин переменного тока. Каскадные установки выполняются на мощности в сотни и тысячи киловатт с регулированием скорости вращения в пределах до 3:1 и больше.
4.2 Регулирование скорости ад изменением скольжения
Величина потока асинхронного двигателя пропорциональна напряжению питания U1, величина э.д.с. ротора, а, следовательно, и ток ротора I2 также пропорциональны напряжению статора. Поэтому момент асинхронного двигателя, в том числе максимальный момент, пропорциональны квадрату напряжения U1 (см.3.21, 3.24). Это обстоятельство определяет недопустимость значительного снижения напряжения питания при пуске и работе асинхронного двигателя.Так, при снижении питающего напряжения на 30% его максимальный момент уменьшится примерно в два раза и при значительном статическом моменте двигатель может «опрокинуться», т.е. остановиться и оказаться под пусковым током. Этот режим является для двигателя аварийным. Такая же ситуация может сложиться, если напряжение питания снижено при пуске двигателя под нагрузкой. Указанные случаи имеют место в слабых электрических сетях, что обуславливает большую аварийность асинхронных короткозамкнутых двигателей. Во избежание этого должны предусматриваться необходимые защитные средства, предотвращающие длительное нахождение асинхронного двигателя под пусковым током.
В то же время преднамеренное снижение (регулирование) напряжения, подаваемого на статорные обмотки, иногда используется для регулирования скорости асинхронного двигателя и для обеспечения плавности пуска.
Регулирование скорости асинхронного двигателя путем изменения питающего напряжения сопряжено с возможностью перегрева его ротора и может производиться лишь при определенных условиях:
при малом диапазоне снижения скорости относительно номинальной;
при сниженном относительно номинального моменте сопротивления на валу двигателя;
использовании двигателя с повышенным скольжением.
Рассмотрим механические характеристики асинхронного короткозамкнутого двигателя с повышенным скольжением при регулировании напряжения статора (рис.3.13). При снижении напряжения U1критическое скольжение двигателя и скорость идеального холостого ходаω0остаются постоянными, а максимальный моментМкдвигателя уменьшается примерно пропорционально квадрату снижения напряжения, соответственно снижается жесткость рабочей части механической характеристики двигателя. Регулирование скорости возможно в диапазонеω0 ÷ ω0 (1 – sк).
Предположим, что момент сопротивления на валу двигателя остается постоянным и равным номинальному Мс=Мн. При снижении напряжения до величиныU12двигатель будет работать со скоростью, равнойω0(1 –sр) со скольжением sр. Мощность скольжения Рs выделяемая в виде потерь в роторе двигателя будет равнаРs = Мн · ω0 ·sри пропорциональна заштрихованной площади прямоугольника. Электромагнитная мощность Рэм = Мс · ω0 пропорциональна площади Оаг1, полезная мощность на валу двигателяМмех = Мс · ω0 = Мс · ω0 ·(1 –sр) будет пропорциональна площади sрв,г1.
Номинальная мощность скольжения, на рассеяние которой рассчитана конструкция двигателя, пропорциональна площади Оаб5н. Сравним эту площадь с заштрихованной (Oaвsp), которая отражает потери в роторе двигателя при работе в точке «в». Она примерно в 3 раза превосходит номинальные потери в роторе. Естественно, что при длительной работе в указанном режиме ротор двигателя будет перегреваться и двигатель выйдет из строя. Для того, чтобы можно было применить данный способ регулирования, нужно установленную мощность двигателя завысить в 3 раза или применить специальную конструкцию интенсивного теплоотвода.
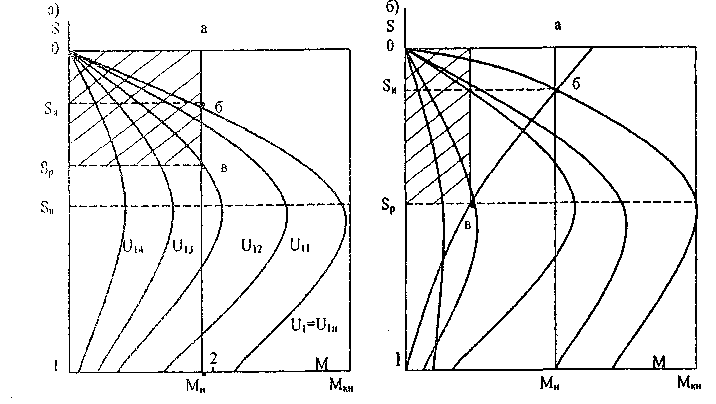
Рис.3.13. Механические характеристики асинхронного двигателя при регулировании напряжения питания а) при постоянном моменте; б) при вентиляторном моменте нагрузки
Поэтому регулирование скорости изменением напряжения питания возможно в том случае, если момент сопротивления Мс при снижении скорости существенно меньше номинального. Такой способ регулирования применяется иногда для приводанасосов и вентиляторов, у которых момент сопротивления на валу резко снижается при уменьшениискорости. Этот случай рассмотрен на рис.3.13,6. Поскольку со снижением скорости Мсуменьшается примерно в квадрате от величины снижения скорости, то мощность скольжения Рsсо снижением скорости растет не столь существенно. Если нагрузка на валу двигателя носит вентиляторный характер, то максимальная величина мощности скольжения составляет 15% от мощности на валу при номинальной скорости. Поэтому для привода вентиляторов и насосов достаточно увеличение установленной мощности двигателя с повышенным скольжением в 1,5-2 раза.
Снижение напряжения на статоре асинхронного двигателя иногда используется для уменьшения пусковых токов двигателя. Это возможно, если момент сопротивления на валу двигателя при пуске не превышает 0,3-0,4/Н, (насосы, вентиляторы или другие рабочие машины, пуск которых производится вхолостую). В этом случае посредством тиристорного регулятора напряжение, подводимое к обмотке статора, снижается, а затем по мере разгона двигателя увеличивается до номинального значения. Этим обеспечивается «плавный пуск» двигателя с уменьшенными пусковыми токами и сниженными динамическими нагрузками на рабочую машину.