Регулирование скорости вращения двигателей постоянного тока
Электропривод, построенный на основе двигателей постоянного тока используются в металлургической, машиностроительной, химической, угольной, деревообрабатывающей и других отраслях промышленности.
Применение электропривода способствует созданию промышленного оборудования, в том числе станков с высокой степенью автоматизации. При этом в автоматизированном электроприводе главное место занимает такая задача, как регулирование скорости вращения двигателей постоянного тока.
Основные способы управления скоростью вращения двигателя постоянного тока:
1) изменение тока в цепи обмотки возбуждения при стабильном напряжении на обмотке якоря;
2) изменение напряжения на обмотке якоря при стабильном токе в цепи обмотки возбуждения;
3) изменение напряжения на обмотке якоря, а также изменение тока в цепи обмотки возбуждения.
Для изменения величин напряжения на обмотке якоря или силы тока в цепи обмотки возбуждения применяются чаще всего управляемые выпрямители. Для работы в промышленном оборудовании используются однофазные и трехфазные выпрямители, собранные по мостовой схеме. При этом конструктивное исполнение двигателей постоянного тока способствует тому, что необходимая мощность выпрямителей для цепи обмотки возбуждения намного меньше мощности выпрямителя для обмотки якоря. Однако, существуют также и недостатки регулирования частоты вращения двигателя изменением силы тока в цепи обмотки возбуждения. Основным недостатком является уменьшение быстродействия исполнения задаваемой скорости, другими словами, худшие динамические свойства автоматизированого электропривода. Для некоторых применений эти показатели являются не критичными, поэтому при проектировании следует руководствоваться требованиями к приводу в соответствии с техническим заданием.
Если технологический процесс включает необходимость изменения направления вращения двигателя(реверс), эта возможность также может быть выполнена одним из способов — в цепи обмотки якоря или обмотки возбуждения. Такая возможность реализуется изменением полярности управляющего постоянного напряжения или тока.
Узнайте условия проведения наладки промышленной электроники, отправив запрос на [email protected]
Время выполнения запроса: 0,00216484069824 секунд.
Регулирование скорости вращения двигателей постоянного тока
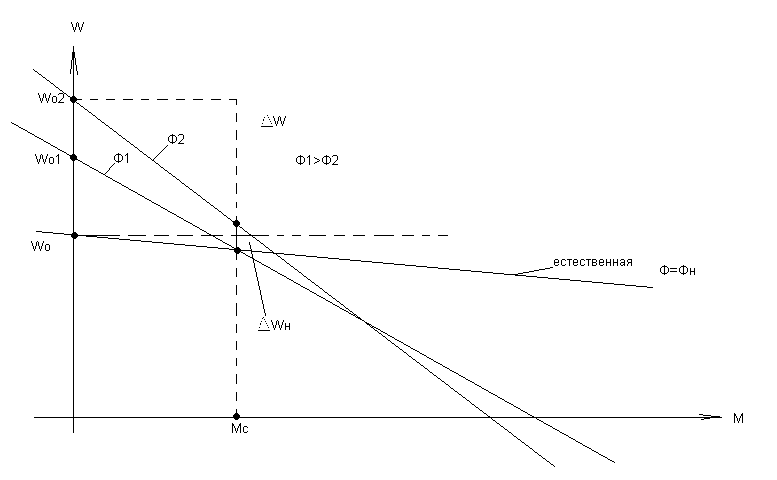
>С увеличением нагрузки на валу двигателя увеличивается так же и ток в якоре. Это вызывает увеличение падения напряжения» сопротивлении обмотки якоря и щеточных контактах.
Так как ток возбуждения остается неизменным (машина нерегулируема), то магнитный поток также постоянен. Однако при увеличении тока в якоре увеличивается размагничивающее действие потока реакции якоря и магнитный поток Ф несколько уменьшится. Увеличение Iяrя вызывает уменьшение скорости двигателя, а уменьшение Ф увеличивает скорость. Обычно падение напряжения влияет на изменение скорости в несколько большей степени, чем реакция якоря, так что с увеличением тока в якоре скорость уменьшается. Изменение скорости у двигателя этого типа незначительно и не превышает 5% при изменении нагрузки от нуля до номинальной, т. е. двигатели параллельного возбуждения имеют жесткую скоростную характеристику.
При неизменном магнитном потоке зависимость момента от тока в якоре представится прямой линией. Но под воздействием
Вращающий момент двигателя реакции якоря с увеличением нагрузки происходит некоторое уменьшение магнитного потока и зависимость момента пойдет несколько ниже прямой линии.
Схема двигателя последовательного возбуждения показана на рис. 153. Пусковой реостат этого двигателя имеет только два зажима, так как обмотка возбуждения и якорь образуют одну последовательную цепь. Характеристики двигателя изображены на рис. 154. Число оборотов двигателя последовательного возбуждения определяется следующим выражением:
где rс— сопротивление последовательной обмотки возбуждения. В двигателе последовательного возбуждения магнитный поток не остается постоянным, а резко изменяется с изменением нагрузки, что вызывает значительное изменение скорости. Так как падеже напряжения в сопротивлении якоря и в обмотке возбуждения очень мало в сравнении с приложенным напряжением, то число оборотов можно приближенно определить следующим выражением:
Если пренебречь насыщением стали, то можно считать магнитный поток пропорциональным току в обмотке возбуждения, который равен току в якоре. Следовательно, у двигателя последовательного возбуждения скорость вращения обратно пропорциональна току в якоре и число оборотов резко уменьшается с увеличением нагрузки, т. е. двигатель имеет мягкую скоростную характеристику. С уменьшением нагрузки скорость вращения двигателя увеличивается. При холостом ходе (Iя=0) скорость двигателя беспредельно возрастает, т. е. двигатель идет в разнос.
Таким образом, характерным свойством двигателей последовательного возбуждения является недопустимость сброса нагрузки, т. е. работы вхолостую или при малых нагрузках. Двигатель имеет минимальную допустимую нагрузку, составляющую 25—30% номинальной. При нагрузке меньше минимально допустимой скорость двигателя резко увеличивается, что может вызвать его разрушение. Поэтому, когда возможны сбросы или резкие уменьшения нагрузки, использование двигателей последовательного возбуждения является недопустимым.
В двигателях очень малых мощностей сброс нагрузки не вызывает разноса, так как механические потери двигателя будут достаточно большой нагрузкой для него.
Вращающий момент двигателя последовательного возбуждения, учитывая пропорциональную зависимость между магнитным потоком и током в якоре (Ф = С’Iя), можно определить следующим выражением:
где K’=KC’
т. е. вращающий момент пропорционален квадрату тока. Однако при больших токах сказывается насыщение стали и зависимость момента приближается к прямой линии. Таким образом двигатели этого типа развивают большие вращающие моменты при малых оборотах, что имеет существенное значение при пуске больших инерционных масс и перегрузках. Эти двигатели широко используют в транспортных и подъемных устройствах.
При смешанном возбуждении возможно как согласное, так и встречное включение обмоток возбуждения.
Двигатели со встречным включением обмоток не нашли широкого применения, так как они обладают плохими пусковыми свойствами и работают неустойчиво.
Скоростные характеристики двигателей смешанного возбуждения занимают промежуточное положение между характеристиками двигателей параллельного и последовательного возбуждения.
С увеличением тока в якоре число оборотов якоря уменьшается в большей мере, чем для двигателей параллельного возбуждения, за счет увеличения магнитного потока, вызываемого увеличением тока в последовательной обмотке возбуждения. При холостом ходе двигатель смешанного возбуждения не идет вразнос, так как магнитный поток не уменьшается до нуля из-за наличия параллельной обмотки возбуждения.
При увеличении нагрузки в двигателях смешанного возбуждения увеличивается магнитный поток и вращающий момент возрастает в большей мере, чем в двигателях параллельного возбуждения, но в меньшей мере, чем в двигателях последовательного возбуждения.
§ 116 РЕГУЛИРОВАНИЕ СКОРОСТИ ВРАЩЕНИЯ ДВИГАТЕЛЕЙ ПОСТОЯННОГО ТОКА
Двигатели постоянного тока дают возможность плавно и экономично регулировать скорость вращения в широких пределах. В результате этого весьма ценного свойства двигатели постоянного тока получили широкое распространение и часто являются незаменимыми.
Число оборотов якоря двигателя при любой схеме возбуждения определяется следующим выражением:
где rс — сопротивление последовательной обмотки возбуждения (для двигателя параллельного возбуждения rс=0). Это выражение показывает, что изменение скорости вращения двигателя можно осуществить изменением напряжения сети, сопротивления цепи якоря и магнитного потока.
Регулирование скорости вращения изменением напряжения сети осуществляется в случае, когда источником электрической энергий двигателя является какой-либо генератор.
Для регулирования скорости вращения двигателя изменением сопротивления цепи якоря используется регулировочный реостат, включенный последовательно с якорем. В отличие от пускового регулировочный реостат должен быть рассчитан на длительное прохождение тока. В сопротивлении регулировочного реостата происходит большая потеря энергии, вследствие чего резко уменьшается
п. д. двигателя.
Регулирование скорости вращения якоря двигателя изменением магнитного потока производится изменением тока в обмотке возбуждения. В двигателях параллельного и смешанного возбуждения включается регулировочный реостат. В двигателях последовательного возбуждения изменение тока в обмотке возбуждения достигается шунтированием этой обмотки каким-либо регулируемым сопротивлением. Этот способ регулирования скорости не создает дополнительных потерь и экономичен.
§ 117. ПОТЕРИ И К. П. Д. МАШИН ПОСТОЯННОГО ТОКА
В машинах постоянного тока при работе происходит потеря энергии, которая складывается из следующих потерь:
1. Потери в стали Рст на гистерезис и вихревые токи, возникающие в сердечнике якоря. При вращении якоря машины сталь его сердечника непрерывно перемагничивается. На перемагничивание стали затрачивается мощность, называемая потерями на гистерезис. Одновременно, при вращении якоря в магнитном поле в сердечнике его индуктируются вихревые токи. Потери на гистерезис и вихревые токи, называемые потерями в стали, обращаются в тепло и нагревают сердечник якоря.
Потери в стали зависят от магнитной индукции и частоты перемагничивания сердечника якоря.
Магнитная индукция зависит от э. д. с. машины или, иначе, от напряжения, а частота перемагничивания — от скорости вращения якоря. Поэтому при работе машины постоянного тока в режиме генератора или двигателя потери в стали будут постоянными, не зависящими от нагрузки, если напряжение на зажимах якоря и скорость его вращения постоянны.
2. Потери энергии на нагревание проводов обмоток возбуждения и якоря протекающими по ним токами, называемые потерями в меди,— Роб.
45 Перечислите способы регулирования скорости дпт независимого возбуждения.
1) регулирование за счет изменения величины сопротивления реостата в цепи якоря,
2) регулирование за счет изменения потока возбуждения двигателя Ф,
3) регулирование за счет изменения подводимого к обмотке якоря двигателя напряжения U. Ток в цепи якоря Iя и момент М, развиваемый двигателем, зависят только от величины нагрузки на его валу.
1) Рассмотрим первый способ регулирования
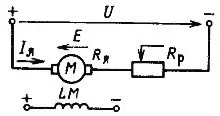
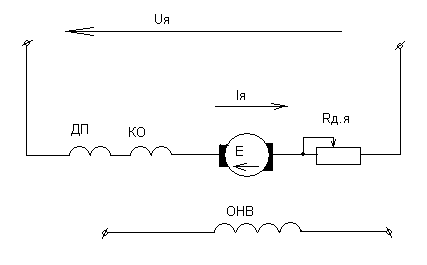
Рис. 1. Схема включения двигателя постоянного тока независимого возбуждения
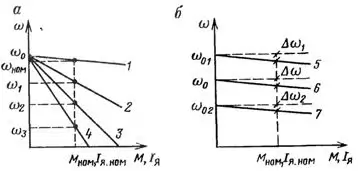
Рис. 2. Механические характеристики двигателя постоянного тока при различных сопротивлениях цепи якоря (а) и напряжениях (б)
Изменяя сопротивление реостата в цепи якоря можно получить при номинальной нагрузке различные угловые скорости электродвигателя на искусственных характеристиках — ω1, ω2, ω3.
По этой причине диапазон регулирования скорости ограничен (D= 2 — З).
Недостатком является наличие значительных потерь мощности при регулировании,
Достоинством простота и надежность схемы управления.
2) При втором способе рег-ие осущ-ся изм-ем величины магнитного потока за счет введения в цепь обмотки возбуждения дополнительного реостата. При ослаблении потока угловая скорость двигателя как при нагрузке, так и при холостом ходе возрастает, а при усилении потока — уменьшается. Практически возможно изменение скорости только в сторону увеличения ввиду насыщения двигателя.
Диапазон регулирования скорости для данного способа D = 2 — 4.
Меха-ие хар-ики для различных значений потока дв-ля приведены на рис. 2, а и 2, б, из которых видно, что хар-ки в пределах номинального тока имеют высокую степень жесткости.
Обмотки возбуждения ДПТ независимого возбуждения обладают значит-ой индуктивностью. В связи с этим рег-ие угловой скорости будет осуществляться плавно.
Преимуществами являются его простота и высокая экономичность.
3) Третий способ рег-ия скорости закл-ся в изменении напряжения, подводимого к обмотке якоря двигателя. Угловая скорость двигателя постоянного тока независимо от нагрузки изменяется прямо пропорционально напряжению, подводимому к якорю. Поскольку все регулировочные хар-ки являются жесткими, работа двигателя является стабильной на всех угловых скоростях и, следовательно, обеспечивается широкий диапазон регулирования скорости независимо от нагрузки.
Диапазон рег-ия равен 10 и может быть расширен за счет специальных схем управления.
При данном способе угловую скорость можно уменьшать и увеличивать относительно основной. Повышение скорости ограничено возможностями источника энергии с регулируемым напряжением и Uном двигателя.
Преимущества данный способ рег-ия явл-ся экономичным, так-так регул-ие угловой скорости двигателя осущ-ся без дополнительных потерь мощности в силовой цепи якоря.
46 Достоинства и недостатки реостатного способа регулирования скорости дпт параллельного возбуждения.
Он связан с включением последовательно с якорем регулировочного реостата Rя.р
Регулирование частоты вращения этим способом приводит к уменьшению частоты вращения относительно естественной характеристики.
Достоинства простота осуществления и дешевизна.
Недостатки оно неэкономично примерно половина мощности, потребляемой из сети, будет рассеиваться в виде теплоты, выделяемой в реостате, т. е. плавность регулирования не большая.
Способы регулирования скорости двигателей постоянного тока независимого возбуждения.
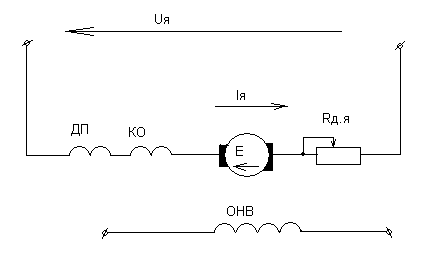
Рисунок — Схема включения двигателя постоянного тока независимого возбуждения.
Многие производственные механизмы требуют регулирования скорости вращения двигателей. Под регулированием скорости следует понимать принудительное изменение скорости путем воздействия на различные параметры электропривода с целью получения требуемых механических характеристик.
Для оценки различных способов регулирования скорости существуют следующие параметры:
Диапазон регулирования:
 это соотношениек,
при которых работа привода при
существующих нагрузках будет устойчивой;
это соотношениек,
при которых работа привода при
существующих нагрузках будет устойчивой;Плавность регулирования – характеризуется числом устойчивых скоростей, получаемых в данном диапазоне регулирования;
Экономичность регулирования. Оцениваются капитальные затраты, потери электроэнергии;
Направление возможного регулирования. Вверх или вниз от скорости, определяемой естественной характеристикой.
 это соотношение
это соотношение к
к ,
при которых работа привода при
существующих нагрузках будет устойчивой;
,
при которых работа привода при
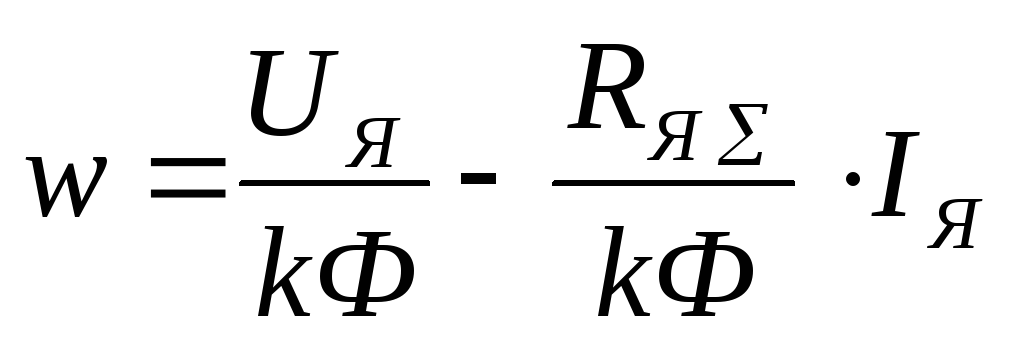
существующих нагрузках будет устойчивой;Запишем уравнение электромеханической характеристики:
 ,
,
из которого следует, что изменять скорость двигателей можно воздействуя на следующие параметры:
- — введение в цепь якоря;
Изменением магнитного потока Ф;
Изменением напряжения, подводимого к якорю
.
 — введение в цепь якоря
— введение в цепь якоря ;
; .
.Способы регулирования скорости двигателей постоянного тока независимого возбуждения.
Рисунок — Схема включения двигателя постоянного тока независимого возбуждения.
Многие производственные механизмы требуют регулирования скорости вращения двигателей. Под регулированием скорости следует понимать принудительное изменение скорости путем воздействия на различные параметры электропривода с целью получения требуемых механических характеристик.
Для оценки различных способов регулирования скорости существуют следующие параметры:
Диапазон регулирования:
это соотношениек,
при которых работа привода при
существующих нагрузках будет устойчивой;Плавность регулирования – характеризуется числом устойчивых скоростей, получаемых в данном диапазоне регулирования;
Экономичность регулирования. Оцениваются капитальные затраты, потери электроэнергии;
Направление возможного регулирования. Вверх или вниз от скорости, определяемой естественной характеристикой.
 это соотношение
это соотношение к
к ,
при которых работа привода при
существующих нагрузках будет устойчивой;
,
при которых работа привода при
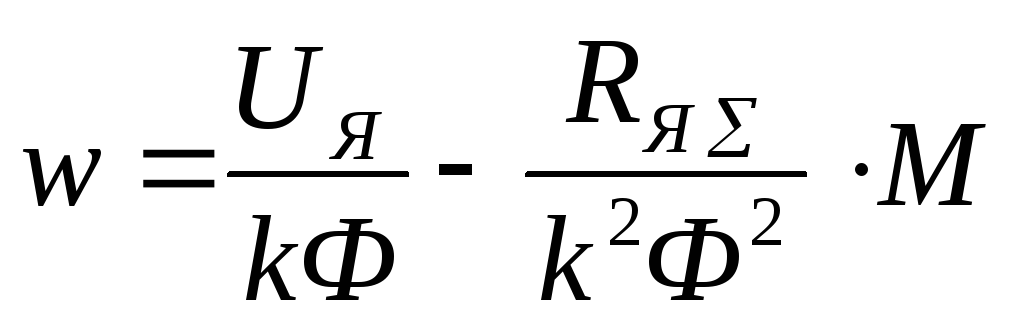
существующих нагрузках будет устойчивой;Запишем уравнение электромеханической характеристики:
 ,
,
из которого следует, что изменять скорость двигателей можно воздействуя на следующие параметры:
- — введение в цепь якоря;
Изменением магнитного потока Ф;
Изменением напряжения, подводимого к якорю
.
 — введение в цепь якоря
— введение в цепь якоря ;
; .
.Регулирование скорости изменением сопротивления якорной цепи.
Р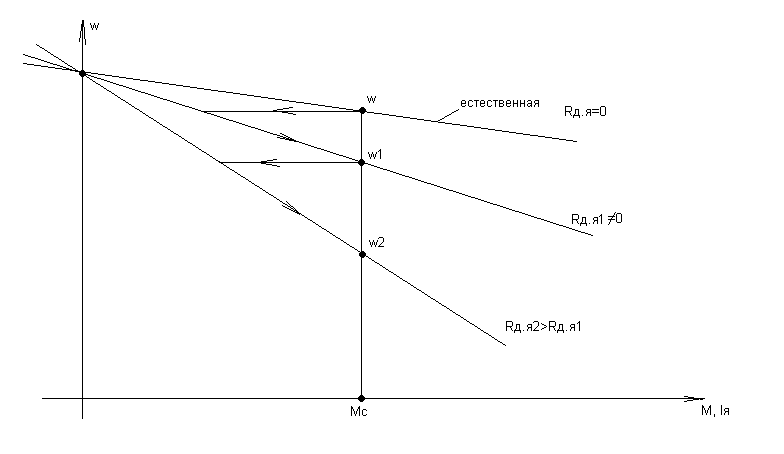 егулирование
скорости введением
егулирование
скорости введением обеспечивает при
обеспечивает при снижение скорости двигателя.
снижение скорости двигателя.
Оценим приведенный способ регулирования:
Диапазон регулирования не превышает 3:1, т.к. работа при низких скоростях нестабильна незначительное изменение МСможет вызвать остановку двигателя. С уменьшением МСуменьшается диапазон регулирования;
Регулирование ступенчатое;
Регулировать можно только вниз от основной скорости.
II. Регулирование скорости изменением магнитного потока.
Отметим, что изменение Ф возможно лишь
в сторону уменьшения, т.е. в режиме,
близком к номинальному, магнитная
система двигателя насыщена. Уменьшение
Ф<ФНприводит к увеличению и увеличенной просадке скорости
и увеличенной просадке скорости .
.
Т.к.  ,
то при ослаблении поля электрического
двигателя, приMC=const,IC.
,
то при ослаблении поля электрического
двигателя, приMC=const,IC.
Оценим заданный способ регулирования:
Диапазон регулирования для большинства двигателей (1,5…2):1
Для двигателя независимого возбуждения можно обеспечить плавное регулирование.
Регулирование экономичное, т.к. капитальные затраты и потер при этом невелики из-за невысокой мощности цепи возбуждения.
Регулирование wвозможно только вверх от основной скорости.
Регулирование скорости изменением подводимого напряжения.
При изменении подводимого напряжения
изменяется лишь скорость идеального
Х.Х.  ,
поэтому все характеристики расположены
параллельно друг другу и параллельно
естественной характеристике.
,
поэтому все характеристики расположены
параллельно друг другу и параллельно
естественной характеристике.
Оценим данный способ регулирования:
Диапазон регулирования (20…30):1
Регулирование скорости плавное
Отличается экономичностью, т.к. энергия торможения возвращается в сеть
Регулирование, как правило, вниз от основной скорости и лишь некоторые двигатели позволяют увеличить UЯвышеUЯН.
Регулирование электродвигателей постоянного тока | КИП и АММИАЧНЫЕ ХОЛОДИЛЬНЫЕ УСТАНОВКИ
Как известно в холодильной технике, да и не только там, необходимо регулировать скорость вращения электродвигателей. Это необходимо для плавного регулирования параметров установки, а как следствие и производительности. Ниже мы рассмотрим способы регулирование электродвигателей постоянного тока.
Способы регулирования электродвигателей постоянного тока.
Как известно, работа электрического двигателя постоянного тока основана на явлении электромагнитной индукции. При этом на проводник с током, помещенный в магнитное поле, действует сила, определяемая следующим образом:
F = BIL,
где I — ток, протекающий по проводнику [A], В — индукция магнитного поля [Тл]; L — длина проводника [м].
При пересечении проводником магнитных силовых линий в нем наводится электродвижущая сила (ЭДС), которая направлена против тока в проводнике и поэтому называется обратной или противодействующей ЭДС. Электрическая мощность в двигателе преобразуется в механическую и частично тратится на нагревание проводника.
Конструктивно все электрические двигатели постоянного тока состоят из индуктора и якоря, разделенных воздушным зазором.
[hana-code-insert name=’reclam google’ /]Электродвигатели постоянного тока применяют в электроприводах, где требуются большой диапазон регулирования скорости, большая точность поддержания скорости вращения, возможность регулирования скорости в большую сторону относительно номинальной.
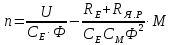
С точки зрения регулирования электродвигателей нас будет интересовать формула для определения частоты вращения. Частота вращения электродвигателя постоянного тока определяется следующим образом:
n = (U – Iя Rя)/(kc Ф),
где U — напряжение питающей сети [В], Iя — ток якоря [A], Rя — сопротивление цепи якоря [Ом], kс — коэффициент, характеризующий магнитную систему, Ф — магнитный поток электродвигателя [Вб].
Данное выражение называется уравнением электромеханической характеристики двигателя постоянного тока независимого возбуждения. Из него следует, что существует три способа регулирования угловой скорости:
- за счет изменения величины сопротивления реостата в цепи якоря;
- за счет изменения потока возбуждения двигателя Ф;
- за счет изменения подводимого к обмотке якоря двигателя напряжения U. Ток в цепи якоря Iя и момент М, развиваемый двигателем, зависят только от величины нагрузки на его валу.
Остановимся подробнее на каждом из этих способов.
Вариант регулирования скорости двигателя постоянного тока изменением сопротивления в цепи якоря приводит к изменению жесткости характеристик в широких пределах, а потому при скоростях менее половины номинальной стабильность работы двигателя резко ухудшается. По этой причине диапазон регулирования скорости ограничен. Скорость можно регулировать в сторону уменьшения от номинальной (об этом свидетельствуют электромеханические и механические характеристики). Высокую плавность регулирования обеспечить трудно. Также недостатком является и наличие значительных потерь мощности в процессе регулирования.
При втором способе регулирование осуществляется изменением величины магнитного потока за счет введения в цепь обмотки возбуждения дополнительного реостата. При ослаблении потока угловая скорость двигателя как при нагрузке, так и при холостом ходе возрастает, а при усилении потока уменьшается. Однако на практике возможно изменение скорости только в сторону увеличения. Благодаря возможности плавного изменения сопротивления реостата появляется и возможность плавного регулирования скорости вращения электродвигателя. Существенными преимуществами данного способа регулирования скорости являются его простота и высокая экономичность.
Однако данный вид регулирования практически не высвобождает мощности (энергопотребление постоянно), а потому используется в приводах только в качестве вспомогательного, причем, как правило, только в условиях холостого хода.
Третий способ регулирования скорости заключается в изменении напряжения, подводимого к обмотке якоря двигателя. Угловая скорость двигателя постоянного тока независимо от нагрузки изменяется прямо пропорционально напряжению, подводимому к якорю.
При этом следует отметить, что все регулировочные характеристики являются жесткими, а степень их жесткости остается для всех характеристик неизменной. Таким образом, работа двигателя является стабильной на всех угловых скоростях, и, следовательно, обеспечивается широкий диапазон регулирования скорости независимо от нагрузки. Более того, угловую скорость можно уменьшать и увеличивать относительно номинальной. Также достаточно просто обеспечить и плавное регулирование частоты вращения электродвигателя: для этого достаточно плавно изменять напряжение постоянного тока.
Наконец, этот вариант регулирования является наиболее экономичным, поскольку регулирование угловой скорости двигателя постоянного тока независимого возбуждения осуществляется без дополнительных потерь мощности в силовой цепи якоря.
[hana-code-insert name=’POBOLYreklama’ /]Учитывая все факторы вышеизложенного анализа существующих способов регулирования частоты двигателей постоянного тока, можно утверждать, что третий способ регулирования является наилучшим.
Именно поэтому в климатической технике регулирование двигателей постоянного тока реализовано посредством изменения питающего напряжения.
Рассмотрим возможные варианты изменения (регулирования) напряжения постоянного тока.
Регулирование скорости вращения и устойчивость работы двигателей постоянного тока
Дата публикации: .
Категория: Машины постоянного тока.
Способы регулирования скорости вращения
Способы регулирования скорости вращения двигателей постоянного тока следуют из соотношений (7) и (9), представленных в статье «Общие сведения о двигателях постоянного тока». Возможны три способа регулирования скорости вращения.
1. Наиболее удобным, распространенным и экономичным является способ регулирования скорости путем изменения потока Фδ, то есть тока возбуждения iв.
С уменьшением Фδ, согласно выражению (7), представленному в статье «Общие сведения о двигателях постоянного тока», скорость возрастает. Двигатели рассчитываются для работы при номинальном режиме с наибольшим значением Фδ, то есть с наименьшей скоростью n. Поэтому практически можно только уменьшать Фδ.
Следовательно, рассматриваемый способ позволяет регулировать скорость вверх от номинальной. При таком регулировании коэффициент полезного действия (к. п. д.) двигателя остается высоким, так как мощность возбуждения мала, в частности мала мощность реостатов для регулирования тока возбуждения. К тому же при уменьшении iв мощность возбуждения U × iв уменьшается.
Верхний предел регулирования скорости вращения ограничивается механической прочностью машины и условиями ее коммутации.
При высоких скоростях коммутация ухудшается вследствие увеличения вибрации щеточного аппарата, неустойчивости щеточного контакта и возрастания реактивной электродвижущей силы (э. д. с.), а также вследствие увеличения максимального напряжения между коллекторными пластинами в результате ослабления основного поля и усиления при этом искажающего влияния поперечной реакции якоря.
Для увеличения диапазона регулирования n посредством ослабления поля в машинах малой и средней мощности с волновой обмоткой якоря иногда применяют раздельное питание катушек возбуждения отдельных полюсов. При этом в одной группе полюсов сохраняют iв = const и большой поток со значительным насыщением участков магнитной цепи, а в другой группе полюсов iв и поток уменьшают. Искажение влияния поперечной реакции якоря под первой группой полюсов в этом случае будет проявляться значительно слабее. Так как в волновой обмотке напряжение между соседними коллекторными пластинами складывается из э. д. с. p секций, расположенных под всеми полюсами, то в результате такого регулирования потока полюсов распределение напряжения между пластинами будет более равномерным.
2. Другой способ регулирования скорости заключается во включении последовательно в цепь якоря реостата или регулируемого сопротивления Rра.
Вместо выражения (7), представленного в статье «Общие сведения о двигателях постоянного тока», при этом имеем
 | (1) |
Этот способ дает возможность регулировать скорость вниз от номинальной и связан со значительными потерями в сопротивлении Rра и понижением к. п. д.
Действительно, при номинальном токе якоря Iа = Iан среднее значение числителя равенства (7), представленного в статье «Общие сведения о двигателях постоянного тока», в относительных единицах равно
U* – Rа* × Iан* = 1 – 0,05 = 0,95.
Если при Фδ = const необходимо уменьшить скорость вдвое, то нужно уменьшить этот числитель вдвое, то есть
U* – Rа* × Iан* – Rра* × Iан* = 1 – 0,05 – Rра* × Iан* = 0,475.
Так как U* = Iан* = 1, то при этом
Rра* = 0,95 – 0,475 = 0,475 ,
то есть в реостате будет теряться 47,5% приложенного напряжения и столько же мощности, подводимой к цепи якоря. По этой причине данный способ применяется в основном для двигателей небольшой мощности, а для более мощных двигателей используется редко и только кратковременно (пуско-наладочные режимы и так далее).
3. Регулирование скорости осуществляется также путем регулирования напряжения цепи якоря. Так как работа двигателя при U > Uн недопустима, то данный способ, согласно выражениям (7) и (9), представленным в статье «Общие сведения о двигателях постоянного тока»), дает возможность регулировать скорость также вниз от номинальной. К. п. д. двигателя при этом остается высоким, так как никаких добавочных источников потерь в схему двигателя не вносится.
Однако в этом случае необходимо отдельный источник тока с регулируемым напряжением, что удорожает установку.
Отметим, что регулирование скорости путем изменения Iа невозможно, хотя такая возможность на первый взгляд вытекает из равенства (7), представленного в статье «Общие сведения о двигателях постоянного тока». Дело в том, что, согласно равенству (3), представленному в статье «Общие сведения о двигателях постоянного тока», двигатель при каждой скорости вращения должен развивать определенный момент M, равный моменту сопротивления механизма Mст при данном значении n. Но при этом в соответствии с выражением (8), представленным в статье «Общие сведения о двигателях постоянного тока», при заданном значении Фδ величина Iа в двигателе будет при каждом значении M тоже вполне определенной.
Условия устойчивости работы двигателя
При работе двигателя всегда возникают определенные возмущения режима работы (кратковременные колебания напряжения сети, случайные кратковременные изменения момента нагрузки на валу и так далее). Такие возмущения чаще всего бывают небольшими и кратковременными, однако при этом происходят, хотя также небольшие и кратковременные, нарушения равенства моментов установившегося режима работы [смотрите выражение (3) в статье «Общие сведения о двигателях постоянного тока»], вследствие чего возникает момент Mдин и изменяется скорость вращения.
Под устойчивостью работы двигателя понимается его способность вернуться к исходному, установившемуся режиму работы при малых возмущениях, когда действие этих возмущений прекратится. Иными словами, работа двигателя называется устойчивой, если бесконечно малые в пределе возмущения его работы вызывают лишь столь же малые изменения величин, характеризующих режим его работы, например скорости вращения, тока якоря и так далее. Двигатель неустойчив в работе, если подобные малые возмущения приводят к большим изменениям режима работы. При неустойчивой работе небольшие кратковременные возмущения вызывают либо непрерывное изменение режима (n, Iа и так далее) в каком-либо одном направлении, либо приводят к колебательному режиму с возрастанием амплитуд колебаний n, Iа и так далее. Естественно, что в условиях эксплуатации необходимо обеспечить устойчивый режим работы двигателя. При неустойчивости двигателя нормальная его работа невозможна, и обычно происходит авария.
Неустойчивая работа может быть также и у генераторов. В статье «Параллельная работа генераторов постоянного тока» была рассмотрена неустойчивость параллельной работы генераторов смешанного возбуждения при отсутствии уравнительного провода. Режим самовозбуждения генераторов постоянного тока (смотрите статью «Генераторы параллельного возбуждения») также, в сущности, представляет собой неустойчивый режим работы, так как iв и U непрерывно изменяются. Работа генератора параллельного возбуждения при Rн = Rв.кр также неустойчива, так как если несколько изменить величину Rв, то напряжение U значительно изменится, то есть возрастет до некоторого конечного значения или упадет почти до нуля.
Устойчивость работы двигателя зависит от вида его механической характеристики M = f(n) и от вида зависимости момента сопротивления на валу от скорости вращения Mст = f(n). Вид последней зависимости определяется свойствами рабочей машины, приводимой в движение двигателем. Например, у металлорежущих станков, если установка резца не изменяется, Mст ≈ const, то есть Mст не зависит от скорости вращения, а у вентиляторов и насосов Mст ∼ nв квадрате.
 |
| Рисунок 1. Устойчивый (а) и неустойчивый (б) режим работы двигателя |
На рисунке 1, а и б изображены два характерных случая работы двигателя. Установившемуся режиму работы (M = Mст) со скоростью вращения n0 соответствует точка пересечения указанных двух характеристик.
Если зависимости M = f(n), и Mст = f(n) имеют вид, изображенный на рисунке 1, а, то при случайном увеличении n в результате возмущения на Δn тормозной момент Mст станет больше движущего M (Mст > M) и поэтому двигатель будет затормаживаться, что заставит ротор вернуться к исходной скорости n0. Точно так же, если в результате возмущения скорость двигателя уменьшится на Δn, то будет Mст < M, поэтому ротор станет ускоряться и снова будет n = n0. Таким образом, в рассматриваемом случае работа устойчива. Как следует из рисунка 1, а, при этом
 | (2) |
что и является признаком, или критерием, устойчивости работы двигателя.
При зависимостях M = f(n) и Mст = f(n) вида рисунка 1, б работа неустойчива. Действительно, при увеличении n от n = n0 до n = n0 + Δn будет M > Mст, возникнет избыток движущего момента, скорость n начнет нарастать, причем избыточный момент M – Mст увеличится еще больше, n еще возрастет и так далее. Если в результате возмущения n = n0 – Δn, то M < Mст и n будет непрерывно уменьшаться. Поэтому работа в точке M = Mст и n = n0 невозможна. Как следует из рисунка 1, б, в этом случае
 | (3) |
что является признаком неустойчивости работы двигателя.
Из изложенного следует, что двигатель с данной механической характеристикой M = f(n) может работать устойчиво или неустойчиво в зависимости от характеристики Mст = f(n) рабочей машины. Возникновение неустойчивости наиболее вероятно при такой механической характеристики двигателя M = f(n) или n = f(M), когда M и n увеличиваются или уменьшаются одновременно (рисунок 1, б). В частности, в этом случае работа неустойчива при Mст = f(n) = const (например, металлорежущие станки). Поэтому двигателей с такими механическими характеристиками не строят.
Изложенное здесь в равной мере относится к устойчивости двигателей как постоянного, так и переменного тока, а также любых видов двигателей.
Изменение режима работы
Двигатели постоянного тока, как, впрочем, и двигатели переменного тока, обладают при соблюдении условий устойчивости замечательной способностью автоматически, без внешнего регулирующего воздействия, приспосабливаться к изменившимся условиям работы. В этом смысле можно сказать, что электрические двигатели обладают свойством саморегулирования. Проиллюстрируем сказанное на примере двигателя параллельного возбуждения.
Допустим, что такой двигатель работает при U = const, iв = const и, следовательно, Фδ ≈ const и нагрузочный момент Mст, развиваемый рабочей машиной, увеличивается. Тогда M < Mст, возникает Mдин < 0 [смотрите выражение (2) в статье «Общие сведения о двигателях постоянного тока»] и n начинает уменьшаться. Но при этом будет уменьшаться также Eа; ток Iа [смотрите выражение (5) в статье «Общие сведения о двигателях постоянного тока»] и момент M [смотрите выражение (8) в статье «Общие сведения о двигателях постоянного тока»] начнут увеличиваться, причем это будет происходить до тех пор, пока снова не наступит равновесие моментов M = Mст. Аналогичным образом изменяется также режим, если Mст уменьшится, причем в этом случае n и Eа начнут увеличиваться, а Iа и M – уменьшаться до тех пор, пока снова будет M = Mст и Mдин = 0.
 |
| Рисунок 2. Переход двигателя параллельного возбуждения к новому режиму работы при уменьшении потока |
Допустим теперь, что с помощью реостата Rр.в (смотрите рисунок 1, в статье «Пуск двигателей постоянного тока») уменьшен ток iв. При этом Фδ будет уменьшаться, однако вследствие механической инерции ротора скорость n в первый момент не изменится. Тогда, согласно выражению (6), представленному в статье «Общие сведения о двигателях постоянного тока», Eа уменьшится, а вследствие этого Iа и M возрастут [смотрите выражения 5 и 8 в статье «Общие сведения о двигателях постоянного тока»]. При этом будет M > Mст, в соответствие с равенством (2), представленным в статье «Общие сведения о двигателях постоянного тока», Mдин > 0, и скорость n начнет увеличиваться. Это вызовет, согласно тем же соотношениям, увеличение Eа и уменьшение Iа и M до тех пор, пока снова не наступит равновесие моментов M = Mст и Mдин = 0 (рисунок 2). При увеличении iв явления развиваются в обратном направлении. Необходимо отметить, что резких изменений iв при регулировании допускать нельзя, так как U и Eа [смотрите выражение 5 в статье «Общие сведения о двигателях постоянного тока»] являются близкими по значению и небольшое изменение Фδ и Eа ведет к большим изменениям Iа и M.
Аналогичным образом происходит переход к новому режиму при изменении других внешних условий (например, введение сопротивления в цепь якоря и так далее), а также в двигателях с другими способами возбуждения.
Из изложенного следует, что поведение двигателя при установившемся режиме работы и переходах к новому режиму работы всецело определяется уравнениями равновесия моментов и напряжения цепи якоря, выражения (2) и (4), представленные в статье «Общие сведения о двигателях постоянного тока»).
Источник: Вольдек А. И., «Электрические машины. Учебник для технических учебных заведений» – 3-е издание, переработанное – Ленинград: Энергия, 1978 – 832с.
4.6. Регулирование угловой скорости двигателя постоянного тока последовательного возбуждения
Для двигателя последовательного возбужде- ния, как и для двигателя независимого возбуждения, воз- можны три способа регулирования угловой скорости, а именно; 1) регулирование посредством резисторов, вклю- ченных в цепь якоря; 2) регулирование изменением тока возбуждения; 3) регулирование изменением подводимого напряжения.


Это вытекает из уравнения электромеханической харак- теристики двигателя
Регулирование угловой скорости изменением сопротивле- ния резисторов в цепи якоря. Введением резисторов после- довательно с обмоткой якоря двигателя можно ступенчато регулировать его угловую скорость вниз от основной. Жесткость характеристик при этом уменьшается по. мере увеличения сопротивления резистора, т. е. стабильность угловой скорости невысокая, уменьшается по мере уве- личения диапазона регулирования и зависит от момента сопротивления (см. рис. 3.75). Диапазон регулирования угловой скорости не превышает (2 -:- 2,5) : 1 и зависит от нагрузки. Регулирование угловой скорости изменением сопротивления последовательно включенного резистора по условиям полного использования двигателя на всех угло- вых скоростях должно производиться при постоянном нагрузочном моменте, что соответствует работе двига- теля с неизменным током якоря, равным номинальному. Как и в предыдущем случае, не учитывается ухудшение условий вентиляции при снижении угловой скорости. Несмотря на большие потери в резисторах, этот способ находит применение в крановых и тяговых установках, поскольку он является одним из простейших для двига- телей последовательного возбуждения, применяемых в ука- занных приводах, а также потому, что работа этих уста- новок происходит с перерывами.Регулирование угловой скорости изменением тока воз- буждения. Этот способ применяется в тех случаях, когда требуется расширить пределы регулирования, за счет увеличения угловой скорости выше основной при загрузке двигателя номинальным током. В этом случае приходится осуществлять изменение тока возбуждения при помощи шунтирования обмотки возбуждения двига- теля .
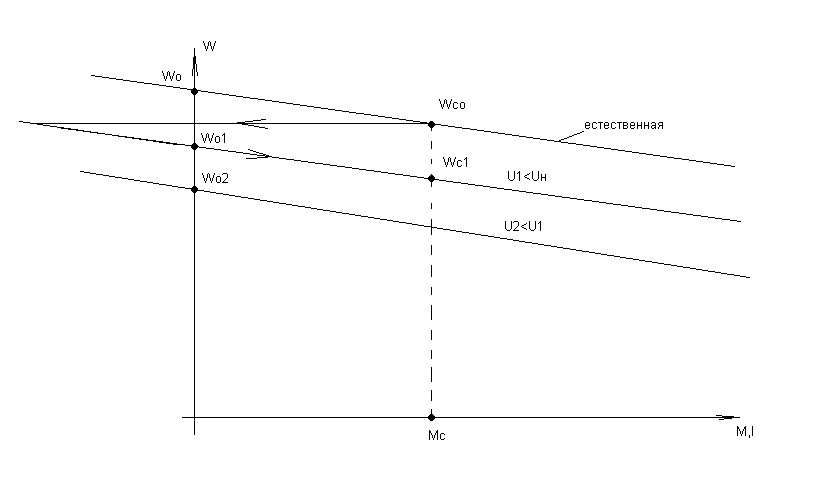
Регулирование угловой скорости изменением подводимого напряжения. Регулирование может быть осуществлено с помощью отдельного генератора, тиристорного преобра- зователя либо последовательно-параллельным включением двигателей. При последовательно-параллельном включении двух двигателей можно получить две ступени угловой скорости благодаря изменению напряжения, подводимого
к каждому из двигателей 1. Подобный способ регулирова- ния осуществляется в том случае, если один производствен- ный механизм приводится одновременно двумя двигателями половинной мощности. Применение двух двигателей вместо одного возможно по разным причинам, например: из-за необходимости сократить время пуска и торможения путем уменьшения суммарного момента инерции или по условиям большей надежности работы, если ее можно вести при пониженной мощности, т. е. с одним двигателем, или, на- конец, по условиям удобства размещения двух двигателей
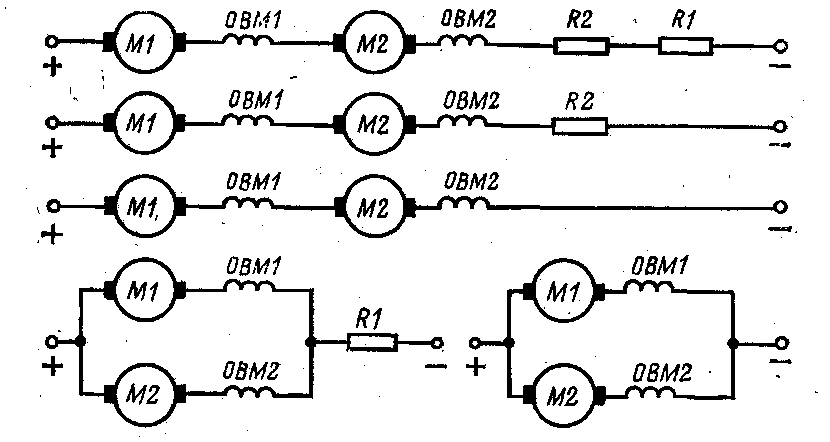
Рис. 4.23. Последовательность переключений при регулировании уг- лэвой скорости двух одинаковых двигателей постоянного тока после- довательного возбуждения.
меньших габаритов вместо одного большого. Такой при- вод находит применение, например, для мощных разли- вочных кранов, в транспортных устройствах, трамваях, в доменных подъемниках, мощных ножницах для разреза- ния металла и для других механизмов. В подобных меха- низмах два двигателя одинаковой мощности работают на один общий вал (многодвигательный электропривод).
Применение последовательно-параллельного включения дает экономические выгоды. При последовательном вклю- чении на каждый из двигателей приходится половина напряжения сети. Когда двигатели переключаются на
1 Такая схема применима и для нескольких двигателей, а также для двигателей независимого или смешанного возбуждения.
параллельную работу, каждый из них оказывается включен- ным на полное напряжение. Таким образом, получаются две ступени регулирования без добавочной бесполезной траты энергии. При снижении угловой скорости вдвое роль резистора, в котором должно теряться напряжение, играет второй двигатель, полезно использующий энергию. Для получения промежуточных ступеней регулирования в цепь якоря может быть введен добавочный резистор. На рис. 4.23 приведены принципиальные схемы переклю- чений, согласно которым получается пять ступеней регу- лирования, из них две без потерь в резисторах. В целях полного использования двигателей это регулирование может производиться при постоянном нагрузочном моменте (без учета ухудшения условий вентиляции).
Кроме указанных способов, находит применение и ком- бинированный способ регулирования угловой скорости — сочетание регулирования изменением подводимого к якорю напряжения и тока возбуждения с реостатным. Этот спо- соб реализуется в схеме шунтирования обмотки якоря.