|
Предлагаемый стабилизатор частоты вращения предназначен для работы с коллекторными двигателями и представляет собой полностью аналоговое устройство. Стабилизатор имеет обратную связь по частоте вращения, в то же время он не требует установки никакого тахогенератора. Наиболее распространенным типом стабилизаторов частоты вращения ведущего двигателя кассетных магнитофонов является регулятор с положительной обратной связью по току [1]. Регулирование происходит параметрически, поэтому частота довольно сильно меняется при изменении нагрузки на валу двигателя. Для повышения качества работы стабилизатора необходимо ввести обратную связь по частоте вращения. Обычно при этом на вал двигателя устанавливается специальный датчик, чаще всего оптический [2]. Такой датчик включает в себя оптопару, световой поток которой прерывается крыльчаткой (или диском с отверстиями), которая насаживается на вал двигателя. Крыльчатка прерывает световой поток, и на выходе оптопары формируются импульсы с частотой вращения двигателя, умноженной на количество прорезей в крыльчатке. Иногда применяется и другой вид датчиков — магнитный. Тогда на вал двигателя устанавливается шестеренка из ферромагнитного материала, рядом с которой крепится магнитная головка. При вращении шестеренки на выводах головки появляется переменное напряжение с амплитудой около милливильта и частотой, равной частоте вращения двигателя, умноженной на количество зубъев на шестеренке. Однако, при доработке готового ЛПМ часто бывает трудно найти место для установки какого-либо датчика. Но это и не обязательно. Дело в том, что информацию о частоте вращения коллекторного двигателя можно извлечь из потребляемого им тока. Этот ток содержит переменную составляющую, первая гармоника которой имеет частоту, равную частоте вращения двигателя, умноженную на число пластин коллектора. Двигатели, которые чаще всего применяются в магнитофонах, имеют три пластины коллектора. Поэтому эта частота равна утроенной частоте вращения двигателя. Именно на этом принципе и построен описываемый регулятор. Рис. 1. Принципиальная схема стабилизатора частоты вращения. Для получения сигнала обратной связи в цепь питания двигателя включен датчик тока R1 (рис. 1). Ток, потребляемый двигателем, создает на этом резисторе падение, которое имеет переменную составляющую около 100 мВ peak-to-peak (рис.2, график 1). Основная гармоника выделяется с помощью простейшего ФНЧ R2C1 и через разделительный конденсатор C2 поступает на вход усилителя, собранного на ОУ U1A. Коэффициент усиления задан резисторами R4R5 так, чтобы усилитель работал в режиме ограничения. На его выходе формируетя практически прямоугольный сигнал с частотой, равной утроенной частоте вращения двигателя (рис. 2, график 2). Этот сигнал дифференцируется с помощью цепочки C3R6R7R8 (рис. 2, график 3). Отрицательный выброс ограничивается диодом VD1. Далее сигнал поступает на компаратор, в роли которого использован ОУ U1B. Опорное напряжение задается с помощью делителя R9R10. На выходе компаратора формируются прямоугольные импульсы постоянной длительности (рис. 2, график 4). Постоянная составляющая такой импульсной последовательности пропорциональна частоте следования импульсов, т.е. частоте вращения двигателя. Импульсная последовательность интегрируется с помощью цепочек R11R12C5 и R13C6. Постоянное напряжение, пропорциональное частоте вращения, поступает на пропорционально-интегрирующий регулятор, собранный на ОУ U1C. Для получения образцового напряжения применен регулируемый стабилитрон U2. Нужную частоту вращения устанавливают регулировкой этого напряжения с помощью переменного резистора R19. Выход ОУ U1C умощнен комплементарным эмиттерным повторителем на транзисторах VT1VT2. Казалось бы, направление тока питания двигателя всегда одно и то же и достаточно было бы одиночного эмитерного повторителя, который обеспечивал бы вытекающий ток. Но на самом деле с двухтактным эмиттерным повторителем гораздо лучше поведение системы во время переходных процессов (при пуске двигателя или при резких колебаниях нагрузки на валу) [2]. Рис.2. Форма сигналов в контрольных точках. Нужно отдельно остановиться на проблеме устойчивости системы автоматического регулирования. В данной ситуации дело усложняется тем, что на устойчивость влияют и механические параметры системы, которые количественно учесть очень трудно. Поэтому в некоторых случаях придется подобрать АЧХ регулятора с помощью элементов R16C7 или даже ограничить коэффициент усиления, включив параллельно этой цепочке резистор. Подбор нужно вести по критерию устойчивости регулятора как в установившемся режиме, так и во время переходных процессов. Для этого нужно с помощью осциллографа контролировать напряжение питания двигателя. При включении оно должно плавно достичь номинального значения, причем без колебательного процесса. Если при работающем двигателе изменить нагрузку на валу, напряжение питания также должно принять новое значение без колебательного процесса. В регуляторе вместо LM324 можно применить практически любые ОУ, например, LM2902, или сдвоенные LM358, LM2904, или даже обычные KP140УД6, УД7. В зависимости от потребляемого двигателем тока может понадобиться установить транзистор VT1 на теплоотвод. Транзистор VT2 теплоотвода не требует. Литература: Ридико Леонид Иванович |
Схема регулятора скорости вращения двигателя постоянного тока – для новичков в радиоделе
Традиционная схема стабилизатора частоты вращения вала электродвигателя постоянного тока в переносных кассетных магнитофонах, реализованная на двух транзисторах или на транзисторной микросборке и одном транзисторе, применяется нашей промышленностью уже более 15 лет в неизменном виде Современные радиоэлементы позволяют построить более простые в схемотехническом отношении стабилизаторы частоты вращения, но обладающие более совершенными характеристиками
Рис 331 Схема стабилизатора
В предлагаемом варианте стабилизатора использовано всего шесть радиоэлементов (не считая электродвигателя), но удалось добиться более высокой стабильности работы при изменении температуры окружающей среды и напряжения источника питания Диапазон питающих напряжений для данной схемы составляет 6..20 В При необходимости сместить диапазон регулирования скорости в область малых оборотов вала электродвигателя следует изменить полярность включения стабилитрона или заменить его другим, с меньшим напряжением стабилизации
Величина сопротивления резистора R3 зависит от сопротивления цепи якоря (Rя) применяемого двигателя н примерно равна 1,5 Rя Вместо микросхемы К140УД6 проверялась работа К140УД7 Транзистор КТ815А можно заменить транзисторами КТ815 и КТ817 с любым буквенным индексом Подстроечный резистор R1 типа CП5-2
Как и в предыдущей главе, начнём рассказ с рассмотрения работы схемы
У коллекторных двигателей постоянного тока скорость вращения вала определяется, как правило, напряжением на двигателе Напряжение на двигателе и потребляемый им ток определят некоторое эквивалентное сопротивление, которое будет отличаться от измеренного омметром сопротивления обмотки двигателя Если у вас есть конкретный моторчик, для которого вы намерены создать схему стабилизации, то можно провести измерения и определиться с параметрами моделирования Если нет, то можно выбрать их «наугад», а позже привести к конкретному виду
С распределения напряжений в схеме и начнём
Обозначение резисторов на схеме ниже я не сохранил Двигатель заменил резистором R2 И, поскольку программа позволяет добавить много измерительных приборов, в количестве вольтметров я себя не ограничивал
Рис 332 Распределение напряжений в схеме
Рабочее напряжение стабилитрона КС133А – это 33В Если напряжение на двигателе стало больше, возрастает ток через стабилитрон, увеличивается падение напряжения на резисторе R2 При этом напряжение на выходе операционного усилителя уменьшается, что приводит к уменьшению тока базы транзистора VT1 и уменьшению напряжения на эмиттере транзистора, а, следовательно, на двигателе При уменьшении напряжения процессы проходят в обратном направлении Изменяя напряжение питания, можно получить следующие результаты:
Рис 333 Напряжения на двигателе при разных напряжениях питания
Напряжение на двигателе, измеряемое вольтметром Pr1 изменяется незначительно при существенном изменении напряжения питания
Эквивалентное сопротивление двигателя (ток через моторчик) будет зависеть от нагрузки на валу двигателя Ток будет возрастать с возрастанием нагрузки Возрастающий ток увеличит падение напряжения на резисторе R1 Что увеличит падение напряжения на резисторе R4 и приведёт к увеличению напряжения на выходе операционного усилителя, то есть, к увеличению напряжения на двигателе А это, в свою очередь, должно увеличить скорость вращения вала, замедлившегося от увеличения нагрузки на валу Увеличение нагрузки на валу я буду моделировать уменьшением сопротивления R2 с 30 до 20 Ом
Рис 334 Изменение напряжения на двигателе при изменении нагрузки
Резисторы R1 и R2 мы можем рассматривать как резисторы отрицательной обратной связи, а резисторы R5 и R4 как резисторы положительной обратной связи Отрицательная обратная связь должна следить за напряжением на двигателе при изменении питающего напряжения, а положительная менять напряжение на двигателе при изменении нагрузки на валу
Разобрав на модели работу схемы, постараемся реализовать подобную или похожую схему на микроконтроллере Вновь скажу, что менять операционный усилитель на микроконтроллер, я особенного смысла не вижу Но считаю, что полезно это выполнить хотя бы за компьютером
Итак Микроконтроллер устройство в своей основе цифровое Поэтому можно использовать такой принцип регулировки напряжения на двигателе:
Как и в других случаях с переменным напряжением, напряжение на двигателе будет действующим В данном случае средним за период колебаний
Уменьшая длительность импульса с высоким уровнем напряжения, увеличив при этом длительность импульса с низким уровнем напряжения, мы получим уменьшение среднего напряжения И наоборот
Такой принцип регулирования напряжения на двигателе наилучшим образом подходит для цифрового устройства
Конечно, как и в случае аналогового управления, схема пополнится управляющим транзистором
Рис 335 Принцип регулировки напряжения на коллекторном двигателе
Воспроизвести такое напряжение с помощью программы не составляет труда Мы собирали такую программу для генератора прямоугольных импульсов Ту часть аналоговой схемы, которая следит за напряжением питания, можно пока оставить без внимания: микроконтроллер лучше питать стабилизированным напряжением
Источник: Гололобов ВН,- Самоучитель игры на паяльнике (Об электронике для школьников и не только), – Москва 2012
Цифровой ШИМ регулятор оборотов коллекторного двигателя.
Еще один обзор на тему всяких вещей для самоделок. На этот раз я расскажу о цифровом регуляторе оборотов. Вещица по своему интересная, но хотелось большего.Кому интересно, читайте дальше 🙂
Имея в хозяйстве некоторые низковольтные устройства типа небольшой шлифовальной машинки и т.п. я захотел немного увеличить их функциональный и эстетический вид. Правда это не получилось, хотя я надеюсь все таки добиться своего, возможно в другой раз, на за саму вещицу расскажу сегодня.
Производитель данного регулятора фирма Maitech, вернее именно это название часто встречается на всяких платках и блочках для самоделок, хотя сайт этой фирмы почему то мне не попался.
Из-за того, что я не сделал в итоге то, что хотел, обзор будет короче обычного, но начну как всегда с того, как это продается и присылается.
В конверте лежал обычный пакетик с защелкой.
В комплекте только регулятор с переменным резистором и кнопкой, жесткой упаковки и инструкции нет, но доехало все целым и без повреждений.
Сзади присутствует наклейка, заменяющая инструкцию. В принципе большего для такого устройства и не требуется.
Указан рабочий диапазон напряжения 6-30 Вольт и максимальный ток в 8 Ампер.
Внешний вид весьма неплох, темное «стекло», темно-серый пластик корпуса, в выключенном состоянии кажется вообще черным. По внешнему виду зачет, придраться не к чему. Спереди была приклеена транспортировочная пленка.
Установочные размеры устройства:
Длина 72мм ( минимальное отверстие в корпусе 75мм), ширина 40мм, глубина без учета передней панели 23мм (с передней панелью 24мм).
Размеры передней панели:
Длина 42.5, мм ширина 80мм
Переменный резистор идет в комплекте с ручкой, ручка конечно грубовата, но для применения вполне сойдет.
Сопротивление резистора 100КОм, зависимость регулировки — линейная.
Как потом выяснилось, 100КОм сопротивление дает глюк. При питании от импульсного БП невозможно выставить стабильные показания, сказывается наводка на провода к переменному резистору, из-за чего показания скачут +\- 2 знака, но ладно бы скакали, вместе с этим скачут обороты двигателя.
Сопротивление резистора высокое, ток маленький и провода собирают все помехи вокруг.
При питании от линейного БП такая проблема отсутствует полностью.
Длина проводов к резистору и кнопке около 180мм.
Кнопка, ну тут ничего особенного. Контакты нормально открытые, установочный диаметр 16мм, длина 24мм, подсветки нет.
Кнопка выключает двигатель.
Т.е. при подаче питания индикатор включается, двигатель запускается, нажатие на кнопку его выключает, второе нажатие включает опять.
Когда двигатель выключен то индикатор так же не светится.
Под крышкой находится плата устройства.
На клеммы выведены контакты питания и подключения двигателя.
Плюсовые контакты разъема соединены вместе, силовой ключ коммутирует минусовой провод двигателя.
Подключение переменного резистора и кнопки разъемное.
На вид все аккуратно. Выводы конденсатора немного кривоваты, но я думаю что это можно простить 🙂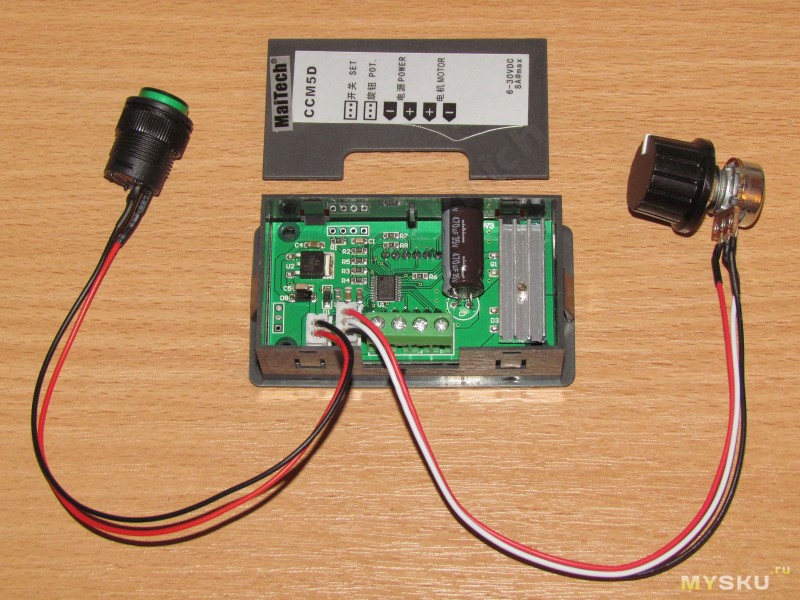
Дальнейшую разборку я спрячу под спойлер.
Подробнее
Индикатор довольно большой, высота цифры 14мм.Размеры платы 69х37мм.
Плата собрана аккуратно, около контактов индикатора присутствуют следы флюса, но в целом плата чистая.
На плате присутствуют: диод для защиты от переполюсовки, стабилизатор 5 Вольт, микроконтроллер, конденсатор 470мкФ 35 Вольт, силовые элементы под небольшим радиатором.
Так же видны места под установку дополнительных разъемов, назначение их непонятно.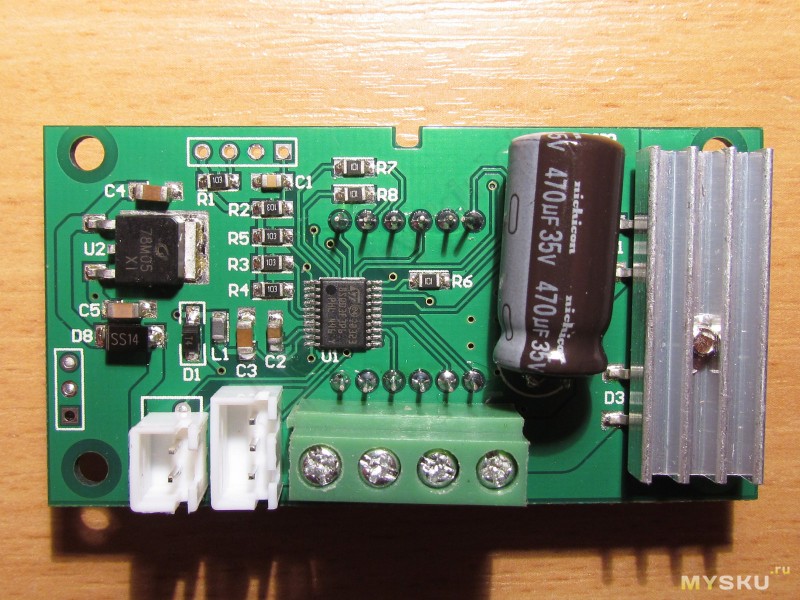
Набросал небольшую блок-схему, просто для примерного понимания что и как коммутируется и как подключается. Переменный резистор так и включен одной ногой к 5 Вольт, второй на землю. потому его можно спокойно заменить на более низкий номинал. На схеме нет подключений к нераспаянному разъему.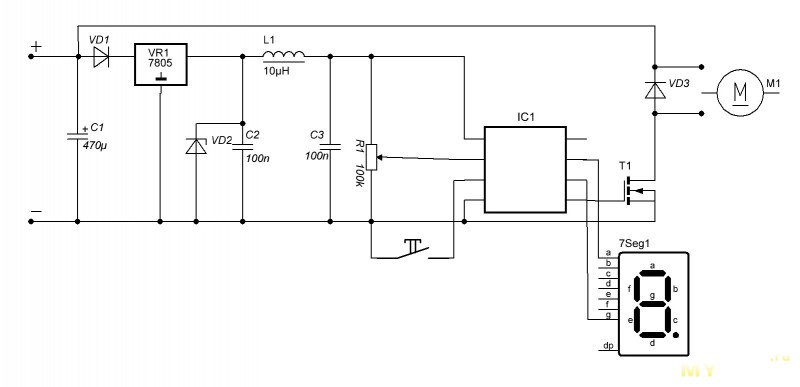
В устройстве использован микроконтроллер 8s003f3p6 производства STMicroelectronics.
Насколько мне известно, этот микроконтроллер используется в довольно большом количестве разных устройств, например ампервольтметрах.
Стабилизатор питания 78M05, при работе на максимальном входном напряжении нагревается, но не очень сильно.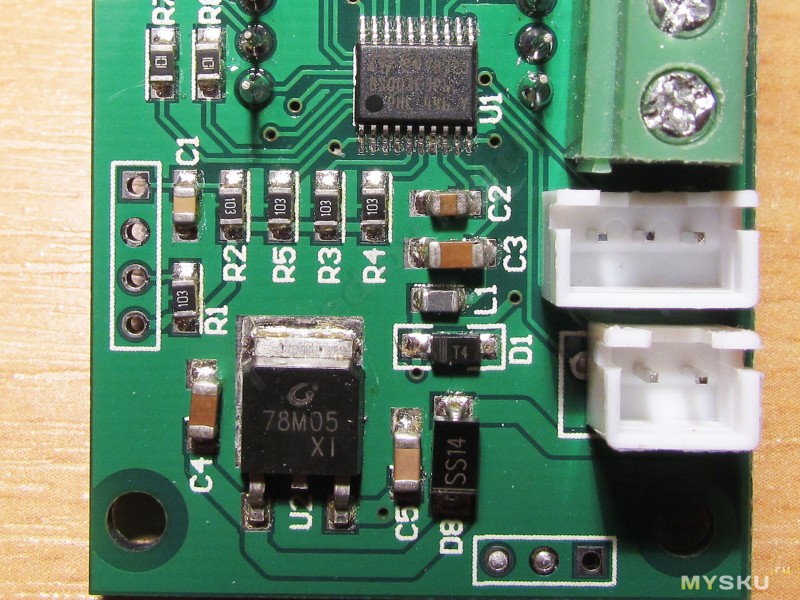
Часть тепла от силовых элементов отводится на медные полигоны платы, слева видно большое количество переходов с одной стороны платы на другую, что помогает отводить тепло.
Так же тепло отводится при помощи небольшого радиатора, который прижат к силовым элементам сверху. Такое размещение радиатора кажется мне несколько сомнительным, так как тепло отводится через пластмассу корпуса и такой радиатор помогает несильно.
Паста между силовыми элементами и радиатором отсутствует, рекомендую снять радиатор и промазать пастой, хоть немного но станет лучше.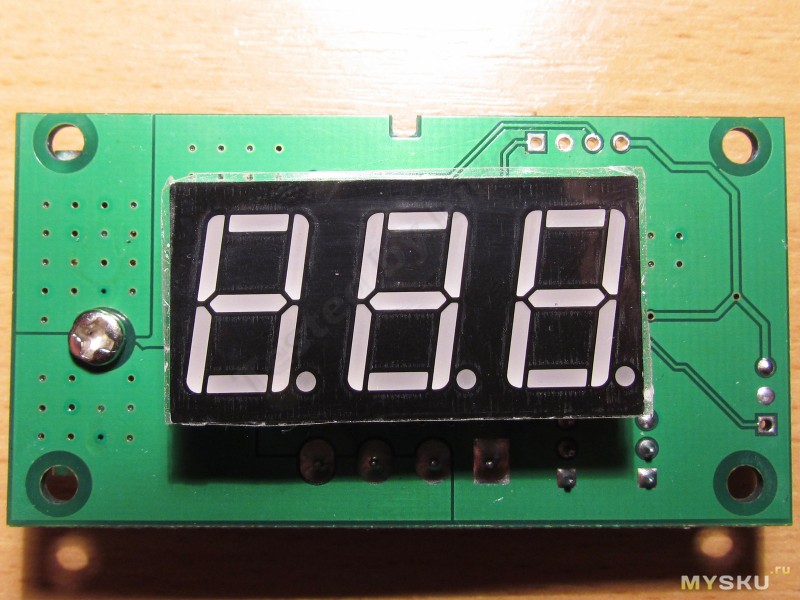
В силовой части применен транзистор IRLR7843, сопротивление канала 3.3мОм, максимальный ток 161 Ампер, но максимальное напряжение всего 30 Вольт, потому я бы рекомендовал ограничивать входное на уровне 25-27 Вольт. При работе на околомаксимальных токах присутствует небольшой нагрев.
Так же рядом расположен диод, который гасит выбросы тока от самоиндукции двигателя.
Здесь применен STPS1045 10 Ампер, 45 Вольт. К диоду вопросов нет.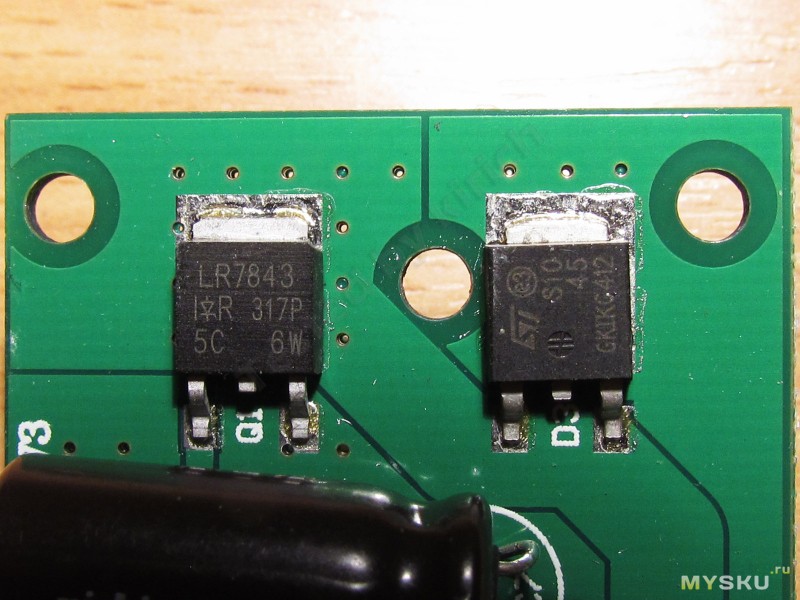
Первое включение. Так получилось, что испытания я проводил еще до снятия защитной пленки, потому на этих фото она еще есть.
Индикатор контрастный, в меру яркий, читается отлично.
Сначала я решил попробовать на мелких нагрузках и получил первое разочарование.
Нет, претензий к производителю и магазину у меня нет, просто я надеялся, что в таком относительно недешевом устройстве будет присутствовать стабилизация оборотов двигателя.
Увы, это просто регулируемый ШИМ, на индикаторе отображается % заполнения от 0 до 100%.
Мелкого двигателя регулятор даже не заметил, дня него это совсем смешной ток нагрузки 🙂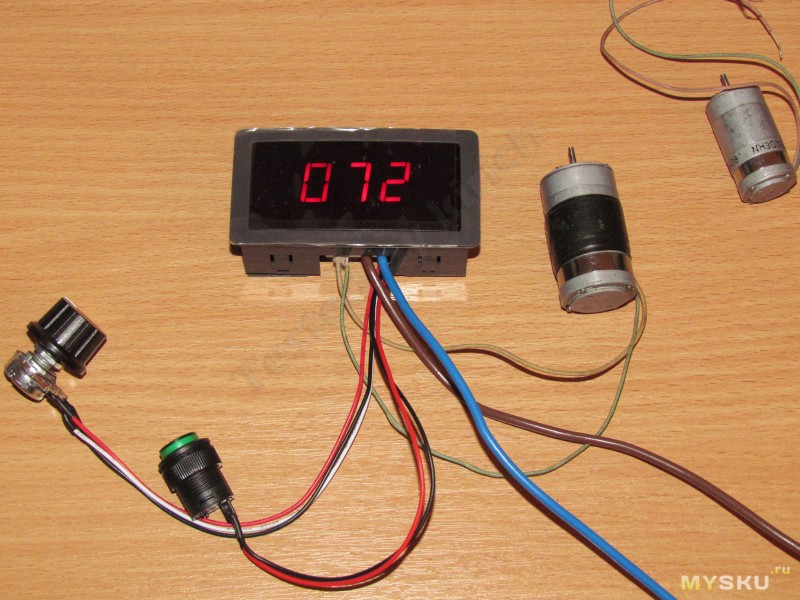
Внимательные читатели наверняка обратили внимание на сечение проводов, которыми я подключил питание к регулятору.
Да, дальше я решил подойти к вопросу более глобально и подключил более мощный двигатель.
Он конечно заметно мощнее регулятора, но на холостом ходу его ток около 5 Ампер, что позволило проверить регулятор на режимах более приближенных к максимальным.
Регулятор вел себя отлично, кстати я забыл указать что при включении регулятор плавно увеличивает заполнение ШИМ от нуля до установленного значения обеспечивая плавный разгон, на индикаторе при этом сразу показывается установленное значение, а не как на частотных приводах, где отображается реальное текущее.
Регулятор не вышел из строя, немного нагрелся, но не критично.
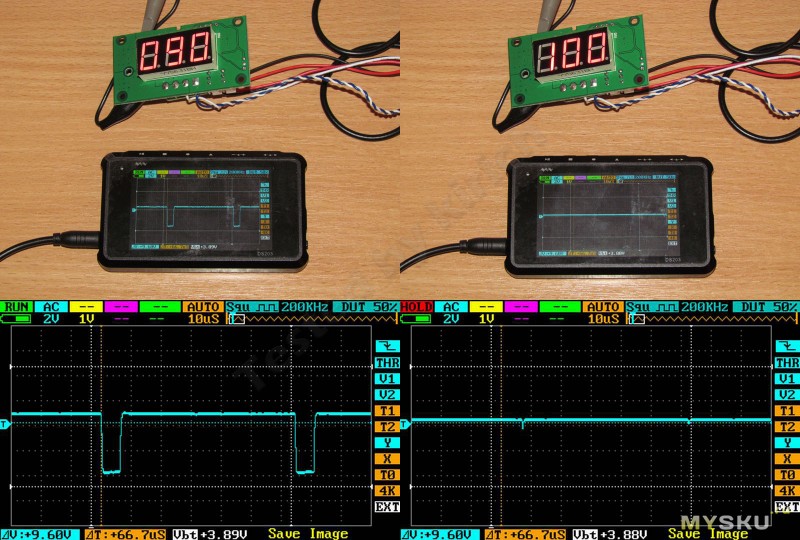
Так как регулятор импульсный, то я решил просто ради интереса потыкаться осциллографом и посмотреть что происходит на затворе силового транзистора в разных режимах.
Частота работы ШИМа около 15 КГц и не меняется в процессе работы. Двигатель заводится примерно при 10% заполнения.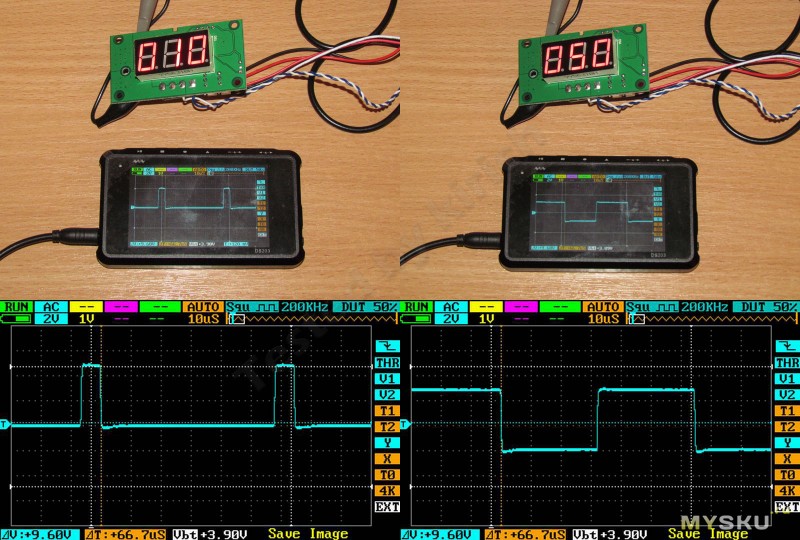
Изначально я планировал поставить регулятор в свой старый (скорее уже древний) блок питания для мелкого электроинструмента (о нем как нибудь в другой раз). по идее он должен был стать вместо передней панели, а на задней должен был расположиться регулятор оборотов, кнопку ставить не планировал (благо при включении устройство сразу переходит в режим — включено).
Должно было получиться красиво и аккуратно.
Но дальше меня ждало некоторое разочарование.
1. Индикатор хоть и был немного меньше по габаритам чем вставка передней панели, но хуже было то, что он не влазил по глубине упираясь в стойки для соединения половинок корпуса.
и если пластмассу корпуса индикатора можно было срезать, то не стал бы все равно, так как дальше мешала плата регулятора.
2. Но даже если бы первый вопрос я бы решил, то была вторая проблема, я совсем забыл как у меня сделан блок питания. Дело в том, что регулятор рвет минус питания, а у меня дальше по схеме стоит реле реверса, включения и принудительной остановки двигателя, схема управления всем этим. И с их переделкой оказалось все куда сложнее 🙁
Если бы регулятор был со стабилизацией оборотов, то я бы все таки заморочился и переделал схему управления и реверса, либо переделал регулятор под коммутацию + питания. А так можно и переделаю, но уже без энтузиазма и теперь не знаю когда.
Может кому интересно, фото внутренностей моего БП, собирался он лет так около 13-15 назад, почти все время работал без проблем, один раз пришлось заменить реле.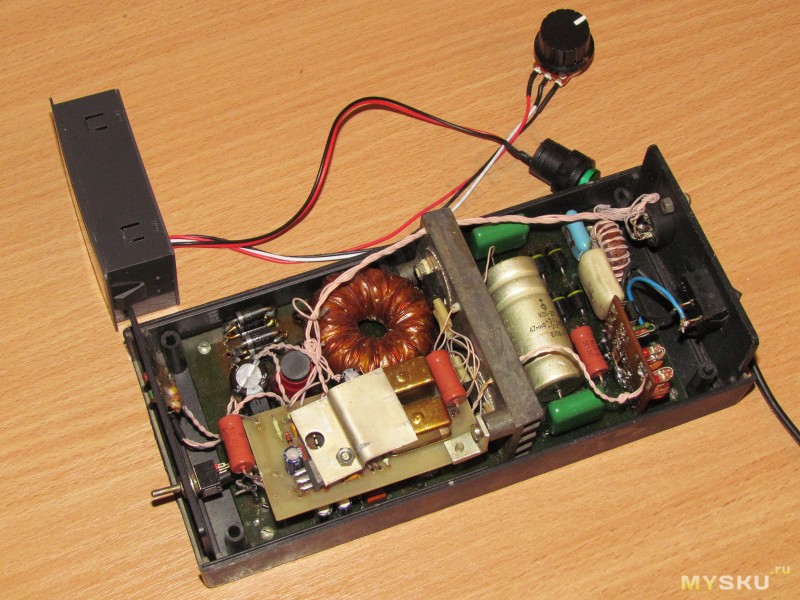
Резюме.
Плюсы
Устройство полностью работоспособно.
Аккуратный внешний вид.
Качественная сборка
В комплект входит все необходимое.
Минусы.
Некорректная работа от импульсных блоков питания.
Силовой транзистор без запаса по напряжению
При таком скромном функционале завышена цена (но здесь все относительно).
Мое мнение. Если закрыть глаза на цену устройства, то само по себе оно вполне неплохое, и выглядит аккуратно и работает нормально. Да, присутствует проблема не очень хорошей помехозащищенности, думаю что решить ее несложно, но немного расстраивает. Кроме того рекомендую не превышать входное напряжение выше 25-27 Вольт.
Больше расстраивает то, что я довольно много смотрел варианты всяких готовых регуляторов, но нигде не предлагают решение со стабилизацией оборотов. Возможно кто то спросит, зачем мне это. Объясню, как то попала в руки шлифовальная машинка со стабилизацией, работать гораздо приятнее чем обычной.
На этом все, надеюсь что было интересно 🙂
Товар предоставлен для написания обзора магазином. Обзор опубликован в соответствии с п.18 Правил сайта.
Система стабилизации скорости вращения двигателя постоянного тока
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ
ГОСУДАРСВЕННОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ
ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ
НОВОСИБИРСКИЙ ГОСУДАРСВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Кафедра Автоматики
Курсовая работа по теории автоматического управления:
“Система стабилизации скорости вращения двигателя постоянного тока”
Факультет АВТ
Группа АА-86
Студент: Григорьева Е.В. Преподаватель:
Французова Г.А.
Вариант: 2.2
Новосибирск, 2011
ЗАДАНИЕ НА КУРСОВУЮ РАБОТУ
Требуется рассчитать систему стабилизации скорости вращения двигателя постоянного тока с независимым возбуждением (рис.1).
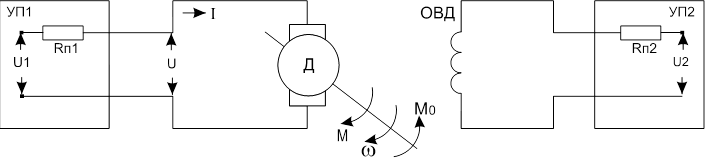
Рис.1. Схема управления двигателем постоянного тока с независимым возбуждением.
УП1, УП2 – управляемые преобразователи для питания якорной цепи и обмотки возбуждения двигателя;
Д – двигатель постоянного тока.
ОВД – обмотка возбуждения двигателя.
Rп1, Rп2 – активные сопротивления преобразователей.
U, I – напряжение и ток на якоре двигателя.
w – угловая скорость вращения двигателя.
М – момент, развиваемый двигателем.
МС – момент сопротивления на валу двигателя, преодоление которого обычно является технологическим назначением двигателя.
U1, U2 – напряжение на входах управляемых преобразователей.
Цель управления заключается в стабилизации скорости вращения двигателя w. Причем выход на заданную скорость вращения должен осуществляться за время tп с перерегулированием не более s. Максимальное отклонение по скорости не должно превышать значения Dwm при МС = МН, МН = СфНIН.
Исходные данные для расчета параметров регулятора приведены в таблице 1.
Таблица 1.
Паспортные данные двигателя | Pп | Jд [кг×м2] | tп [c] | s % | Dwm/wн % | ||||
Рн [кВт] | Uн [В] | Iн [A] | wн [рад/c] | h | |||||
0,55 | 220 | 3,2 | 102,7 | 0,7 | 2 | 0,005 | 0,55 | 10 | 3,2 |
СОДЕРЖАНИЕ
Анализ устройства как объекта автоматического управления ……………..4
Описание математической модели системы ..………………………………..5
Анализ свойств математической модели системы ……………………………8
Синтез системы управления ………………….………………………………..10
Список использованной литературы ..………………………………………..13
АНАЛИЗ УСТРОЙСТВА КАК ОБЪЕКТА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Система стабилизации скорости вращения двигателя постоянного тока – система, в которой скорость вращения двигателя зависит от величины напряжения на якоре двигателя.
Данная система может рассматриваться как объект регулирования скорости вращения двигателя.
Система состоит из двигателя постоянного тока, тахогенератора и двух управляемых преобразователей. Тахогенератор выполняет функцию регулирующего органа.
В зависимости от скорости вращения двигателя, тахогенератор генерирует напряжение, которое сравнивается с входным напряжением. Разность входного напряжения и напряжения с тахогенератора поступает на регулятор, который регулирует напряжение на якоре двигателя, а соответственно и скорость вращения двигателя.

Рис.2. Схема системы управления двигателем.
ОПИСАНИЕ МАТЕМАТИЧЕСКОЙ МОДЕЛИ СИСТЕМЫ
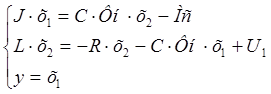
На основании физических законов и при допущении, что инерционность управляемых преобразователей существенно ниже инерционности процессов в двигателе, можно записать математическую модель системы в линейном приближении:
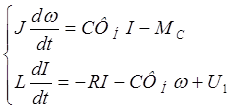
где J – момент инерции двигателя совместно с приведенным значением момента инерции механизма; Фн – номинальное значение потока возбуждения двигателя; С – коэффициент, зависящий от конструкции двигателя; L = LП + LЯ , R = RП1 + RЯ – индуктивность и активное сопротивление якорной цепи «преобразователь – двигатель».
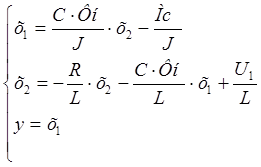
Введем переменные состояния: х1 = w , х2 = I ,
y = w = х1 .
Тогда система уравнений примет вид:
или
Определим коэффициенты в системе уравнений
Для электроприводов общепромышленных механизмов:
J = (1,1 … 1,25) Jд = 1,2* Jд =0,006 кг×м2 .
Параметры якорной цепи двигателя определяются на основе паспортных данных. Активное сопротивление якорной цепи двигателя находят по выражению

Активное сопротивление преобразователя соизмеримо с сопротивлением нагрузки
(RП1 » RЯ).
Активное сопротивление якорной цепи «преобразователь – двигатель»:

Индуктивность якорной цепи:


Индуктивностью преобразователя можно пренебречь (LП << LЯ), тогда индуктивность цепи «преобразователь-двигатель» равна:
L = LЯ = 0,084 Гн.
Произведение СФн определяется по соотношению
 .
.
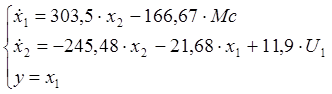
После подстановки найденных величин в систему уравнений, она запишется следующим образом:
Определим передаточную функцию двигателя Wд(p):

Для выбора тахогенератора воспользуемся выражением:

 =>
=> 
Выберем тахогенератор ТД-103-ПМ, параметры которого:

Тогда передаточная функция тахогенератора примет вид:
Общая передаточная функция объекта управления:

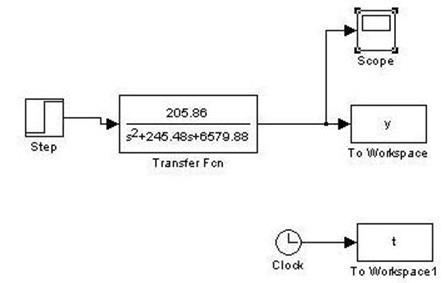
Рис 1. Структурная схема объекта управления
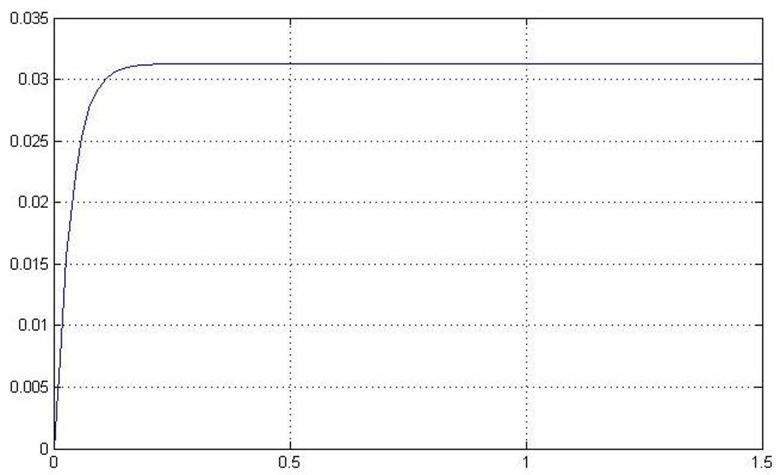
Рис 2. Переходный процесс в объекте управления
Путем имитационного моделирования исследованы собственные свойства
Саратовский государственный технический университет
Министерство общего и профессионального образования
Российской Федерации
СИНТЕЗ СИСТЕМ
АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
Методические указания к выполнению курсовой работы
по курсу «Теория автоматического управления »
для студентов специальности 210100
Одобрено
редакционно-издательским советом
Саратовского государственного
технического университета
Саратов 1994
ВВЕДЕНИЕ
Настоящие методические указания предназначены для выполнения курсовой работы по курсу «Теория автоматического управления» (ТАУ). Эта работа предусмотрена учебными планами специальности 210100 (управление и информатика в технических системах) для всех форм обучения, и ее цель закрепить основные теоретические положения курса и привить студентам навыки самостоятельного практического исследования и расчета систем автоматического управления.
В качестве задания студентам предлагается составить математическую модель системы автоматического управления реальным промышленным объектом, провести анализ этой системы и синтез законов управления. Причем, задание предполагает проведение исследований как в непрерывной постановке, так и в случае, когда в качестве управляющего устройства (регулятора) используется БЦВМ. Таким образом, выполнение курсовой работы, с одной стороны, опирается на большинство теоретических разделов курса, а с другой, предоставляет возможность уяснить практическую схему современного проектирования реальных систем автоматического управления.
В соответствии с учебными планами специальности всех форм обучения курс ТАУ является двухсеместровым, и изучение этой дисциплины условно разбивается на две части. Выполнение курсовой работы предусмотрено при изучении второй части курса. Однако выдача задания на проектирование производится, как правило, при изучении первой части. В этом случае исходные данные к курсовой работе служат основой для индивидуальных домашних заданий и расчетно-графических работ, выполняемых при изучении первой части курса.
При получении задания на курсовую работу каждому студенту сообщается двухзначный шифр, первая цифра которого означает вариант системы управления, а вторая номер варианта исходных данных для проектирования указанной системы. Все предлагаемые варианты курсовой работы примерно равнозначны по сложности и по объему вычислений. При этом на ее выполнение отводится 50 академических часов самостоятельной работы.
ОПИСАНИЕ, ИСХОДНЫЕ ДАННЫЕ И ТЕХНИЧЕСКОЕ ЗАДАНИЕ НА ПРОЕКТИРОВАНИЕ СИСТЕМ УПРАВЛЕНИЯ
1. Система стабилизации скорости вращения двигателя
Система предназначена для стабилизации скорости вращения двигателя постоянного тока, работающего при изменяющемся моменте сопротивления нагрузки.
Функционально-принципиальная схема системы представлена на рис.1. Система состоит из двигателя (Д), работающего на изменяющуюся нагрузку (Н), усилителя мощности, в качестве которого используется генератор (Гm), дополнительного генератора (Г0) и регулятора (Р).
Н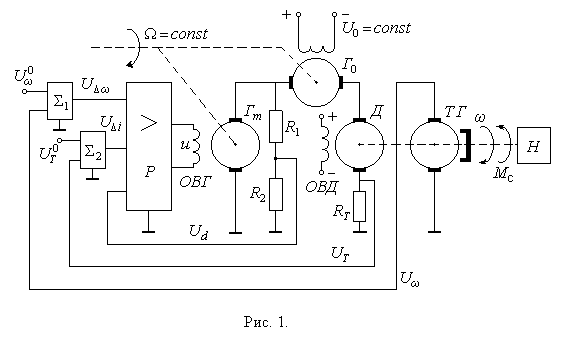 а
вход регулятора поступает сигнал
а
вход регулятора поступает сигнал  пропорциональный разности заданной
скорости стабилизации
пропорциональный разности заданной
скорости стабилизации  и действительной скорости вращения
нагрузки,
которая измеряется с помощью тахогенератора
(ТГ).
Кроме того, на регулятор могут подаваться:
сигнал
и действительной скорости вращения
нагрузки,
которая измеряется с помощью тахогенератора
(ТГ).
Кроме того, на регулятор могут подаваться:
сигнал  c
делителя R1, R2,
пропорциональный напряжению генератора Гmи сигнал
c
делителя R1, R2,
пропорциональный напряжению генератора Гmи сигнал  ,
пропорциональный разности заданного
тока якоря
,
пропорциональный разности заданного
тока якоря и действительного тока
и действительного тока ,
измеряемого с помощью резистора
,
измеряемого с помощью резистора  .
.
Система
работает следующим образом. При
номинальной нагрузке вал двигателя вращается с заданной
скоростью
вал двигателя вращается с заданной
скоростью под действием напряжения с генератораГ0.
При этом напряжение с тахогенератора
под действием напряжения с генератораГ0.
При этом напряжение с тахогенератора  равно по величине и противоположно по
знаку напряжению задатчика
равно по величине и противоположно по
знаку напряжению задатчика ,
и с выхода сумматора
,
и с выхода сумматора сигнал равен нулю. Кроме того, в этом
режиме через двигатель протекает
номинальный ток
сигнал равен нулю. Кроме того, в этом
режиме через двигатель протекает
номинальный ток  ,
и напряжение
,
и напряжение  на резисторе
на резисторе  равно по величине и противоположно по
знаку напряжению
равно по величине и противоположно по
знаку напряжению  ,
так что на выходе сумматора
,
так что на выходе сумматора  сигнал также отсутствует. Таким образом,
при номинальной нагрузке, если
сигнал также отсутствует. Таким образом,
при номинальной нагрузке, если ,
на обмотку возбуждения генератора (ОВГ)
сигнал не подается, и напряжение на
выходе генератора
,
на обмотку возбуждения генератора (ОВГ)
сигнал не подается, и напряжение на
выходе генератора  равно нулю.
равно нулю.
При
изменении нагрузки на величину  изменяется скорость двигателя и ток
якоря, что приводит к появлению сигналов
на входе регулятора и, следовательно,
к появлению напряжения на генераторе
изменяется скорость двигателя и ток
якоря, что приводит к появлению сигналов
на входе регулятора и, следовательно,
к появлению напряжения на генераторе .
В результате под действием суммарного
напряжения на генераторов
.
В результате под действием суммарного
напряжения на генераторов скорость двигателя становится близкой
к номинальной.
скорость двигателя становится близкой
к номинальной.
Исходные данные для проектирования приведены в таблице 1.
Примечания:
1.
В качестве объекта управления принять
двигатель с усилителем мощности
(генераторы  ).
).
2.
При составлении математической модели
объекта сопротивлениями и индуктивностями
якорных обмоток генераторов  пренебречь.
пренебречь.
3. При анализе и синтезе системы использовать описание объекта управления в отклонениях от режима стабилизации. При этом считать, что изменение момента сопротивления нагрузки от номинального значения носит ступенчатый характер.