Устройство плавного пуска электродвигателя. Как это работает.
 Устройство плавного пуска — электротехническое устройство, используемое в асинхронных электродвигателях, которое позволяет во время запуска удерживать параметры двигателя (тока, напряжения и т.д.) в в безопасных пределах. Его применение уменьшает пусковые токи, снижает вероятность перегрева двигателя, устраняет рывки в механических приводах, что, в конечном итоге, повышает срок службы электродвигателя.
Устройство плавного пуска — электротехническое устройство, используемое в асинхронных электродвигателях, которое позволяет во время запуска удерживать параметры двигателя (тока, напряжения и т.д.) в в безопасных пределах. Его применение уменьшает пусковые токи, снижает вероятность перегрева двигателя, устраняет рывки в механических приводах, что, в конечном итоге, повышает срок службы электродвигателя.
Назначение
Управление процессом запуска, работы и остановки электродвигателей. Основными проблемами асинхронных электродвигателей являются:
- невозможность согласования крутящего момента двигателя с моментом нагрузки,
- высокий пусковой ток.
Во время пуска крутящий момент за доли секунды часто достигает 150-200%, что может привести к выходу из строя кинематической цепи привода. При этом стартовый ток может быть в 6-8 раз больше номинального, порождая проблемы со стабильностью питания. Устройство плавного пуска позволяют избежать этих проблем, делая разгон и торможение двигателя более медленными. Это позволяет снизить пусковые токи и избежать рывков в механической части привода или гидравлических ударов в трубах и задвижках в момент пуска и остановки двигателей.
Принцип действия устройство плавного пуска
Основной проблемой асинхронных электродвигателей является то, что момент силы, развиваемый электродвигателем, пропорционален квадрату приложенного к нему напряжения, что создаёт резкие рывки ротора при пуске и остановке двигателя, которые, в свою очередь, вызывают большой индукционный ток.
Софтстартеры могут быть как механическими, так и электрическими, либо сочетать то и другое.
Механические устройства непосредственно противодействуют резкому нарастанию оборотов двигателя, ограничивая крутящий момент. Они могут представлять собой тормозные колодки, жидкостные муфты, магнитные блокираторы, противовесы с дробью и прочее.
Данные электрические устройства позволяют постепенно повышать ток или напряжение от начального пониженного уровня (опорного напряжения) до максимального, чтобы плавно запустить и разогнать электродвигатель до его номинальных оборотов. Такие УПП обычно используют амплитудные методы управления и поэтому справляются с запуском оборудования в холостом или слабо нагруженном режиме. Более современное поколение УПП (например, устройства ЭнерджиСейвер) используют фазовые методы управления и потому способны запускать электроприводы, характеризующиеся тяжелыми пусковыми режимами «номинал в номинал». Такие УПП позволяют производить запуски чаще и имеют встроенный режим энергосбережения и коррекции коэффициента мощности.
Выбор устройства плавного пуска

При включении асинхронного двигателя в его роторе на короткое время возникает ток короткого замыкания, сила которого после набора оборотов снижается до номинального значения, соответствующего потребляемой электрической машиной мощности. Это явление усугубляется тем, что в момент разгона скачкообразно растет и крутящий момент на валу. В результате может произойти срабатывание защитных автоматических выключателей, а если они не установлены, то и выход из строя других электротехнических устройств, подключенных к той же линии. И в любом случае, даже если аварии не произошло, при пуске электромоторов отмечается повышенный расход электроэнергии. Для компенсации или полного устранения этого явления используются устройства плавного пуска (УПП).
Как реализуется плавный пуск
Чтобы плавно запустить электродвигатель и не допустить броска тока, используются два способа:
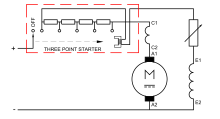
- Ограничивают ток в обмотке ротора. Для этого ее делают состоящей из трех катушек, соединенных по схеме «звезда». Их свободные концы выводят на контактные кольца (коллекторы), закрепленные на хвостовике вала. К коллектору подключают реостат, сопротивление которого в момент пуска максимальное. По мере его снижения ток ротора растет и двигатель раскручивается. Такие машины называются двигателями с фазным ротором. Они используются в крановом оборудовании и в качестве тяговых электромоторов троллейбусов, трамваев.
- Уменьшают напряжение и токи, подаваемые на статор. В свою очередь, это реализуется с помощью:
а) автотрансформатора или реостата;
б) ключевыми схемами на базе тиристоров или симисторов.
Именно ключевые схемы и являются основой построения электротехнических приборов, которые принято назвать устройствами плавного пуска или софтстартерами. Обратите внимание, что частотные преобразователи так же позволяют плавно запустить электродвигатель, но они лишь компенсируют резкое возрастание крутящего момента, не ограничивая при этом пускового тока.

Принцип работы ключевой схемы основывается на том, что тиристоры отпираются на определенное время в момент прохождения синусоидой ноля. Обычно в той части фазы, когда напряжение растет. Реже – при его падении. В результате на выходе УПП регистрируется пульсирующее напряжение, форма которого лишь приблизительно похожа на синусоиду. Амплитуда этой кривой растет по мере того, как увеличивается временной интервал, когда тиристор отперт.
Критерии выбора софтстартера
По степени снижения степени важности критерии выбора устройства располагаются в следующей последовательности:
- Мощность.
- Количество управляемых фаз.
- Обратная связь.
- Функциональность.
- Способ управления.
- Дополнительные возможности.
Мощность
Главным параметром УПП является величина Iном – сила тока, на которую рассчитаны тиристоры. Она должна быть в несколько раз больше значения силы тока, проходящего через обмотку двигателя, вышедшего на номинальные обороты. Кратность зависит от тяжести пуска. Если он легкий – металлорежущие станки, вентиляторы, насосы, то пусковой ток в три раза выше номинального. Тяжелый пуск характерен для приводов, имеющих значительный момент инерции. Таковы, например, вертикальные конвейеры, пилорамы, прессы. Ток выше номинального в пять раз. Существует и особо тяжелый пуск, который сопровождает работу поршневых насосов, центрифуг, ленточных пил… Тогда I
Тяжесть пуска влияет и на время его завершения. Он может длиться от десяти до сорока секунд. За это время тиристоры сильно нагреваются, поскольку рассеивают часть электрической мощности. Для повторения им надо остыть, а на это уходит столько же, сколько на рабочий цикл. Поэтому если технологический процесс требует частого включения-выключения, то выбирайте софтстартер как для тяжелого пуска. Даже если ваше устройство не нагружено и легко набирает обороты.
Количество фаз
Можно управлять одной, двумя или тремя фазами. В первом случае устройство в большей степени смягчает рост пускового момента, чем тока. Чаще всего используются двухфазные пускатели. А для случаев тяжелого и особо тяжелого пуска – трехфазные.
Обратная связь
УПП может работать по заданной программе – увеличить напряжение до номинала за указанное время. Это наиболее простое и распространенное решение. Наличие обратной связи делает процесс управления более гибким. Параметрами для нее служат сравнение напряжения и вращающего момента или фазный сдвиг между токами ротора и статора.
Функциональность
Возможность работать на разгон или торможение. Наличие дополнительного контактора, который шунтирует ключевую схему и позволяет ей остыть, а также ликвидирует несимметричность фаз из-за нарушения формы синусоиды, которое приводит к перегреву обмоток.
Способ управления
Бывает аналоговым, посредством вращения потенциометров на панели, и цифровым, с применением цифрового микроконтроллера.
Дополнительные функции
Все виды защиты, режим экономии электроэнергии, возможность пуска с рывка, работы на пониженной скорости (псевдочастотное регулирование).
Правильно подобранный УПП увеличивает вдвое рабочий ресурс электродвигателей, экономит до 30 процентов электроэнергии.
Зачем нужно устройство плавного пуска (софтстартера)
Все чаще при запуске электроприводов насосов, вентиляторов применяются устройство плавного пуска (софтстартер). С чем это связано? В нашей статье мы постараемся осветить этот вопрос.
Асинхронные двигатели используются уже более ста лет, и за это время относительно мало изменилось их функционирование. Запуск этих устройств и связанные с ним проблемы хорошо известны их владельцам. Пусковые токи приводят к просадкам напряжения и перегрузкам проводки, вследствие чего:
-
некоторая электротехника может самопроизвольно отключаться;
-
возможен сбой оборудования и т. д.
Своевременно установленный приобретенный и подключенный софтстартер позволяет избежать лишних трат денег и головной боли.
Что такое пусковой ток
В основе принципа действия асинхронных двигателей лежит явление электромагнитной индукции. Наращивание обратной электродвижущей силы (э. д. с), которая создается путем применения изменяющегося магнитного поля во время запуска двигателя, приводит к переходным процессам в электрической системе. Этот переходной режим может повлиять на систему электропитания и другое оборудование, подключенное к нему.
Во время запуска электродвигатель разгоняется до полной скорости. Продолжительность начальных переходных процессов зависит от конструкции агрегата и характеристик нагрузки. Пусковой момент должен быть наибольшим, а пусковые токи – наименьшими. Последние влекут за собой пагубные последствия для самого агрегата, системы электроснабжения и оборудования, подключенного к нему.
В течение начального периода пусковой ток может достигать пяти-восьмикратного тока полной нагрузки. Во время пуска электродвигателя кабели вынуждены пропускать больше тока, чем во время периода стабильного состояния. Падение напряжения в системе также будет намного больше при пуске, чем во время стабильной работы – это становится особенно очевидным при запуске мощного агрегата или большого числа электродвигателей одновременно.
Способы защиты электродвигателя
Поскольку использование электродвигателей стало широко распространенным, преодоление проблем с их запуском стало проблемой. На протяжении многих лет для решения этих задач были разработано несколько методов, каждый из которых имеет свои преимущества и ограничения.
В последнее время были достигнуты значительные успехи в использовании электроники в регулировании электроэнергии для двигателей. Все чаще при запуске электроприводов насосов, вентиляторов применяются устройство плавного пуска. Всё дело в том, что прибор имеет ряд особенностей.
Особенностью устройства пуска является то, что он плавно подаёт на обмотки двигателя напряжение от нуля до номинального значения, позволяя двигателю плавно разгоняться до максимальной скорости. Развиваемый электродвигателем механический момент пропорционален квадрату приложенного к нему напряжения.
В процессе пуска УПП постепенно увеличивает подаваемое напряжение, и электромотор разгоняется до номинальной скорости вращения без большого момента и пиковых скачков тока.
Виды устройств плавного пуска
На сегодняшний день для плавного запуска техники используются три типа УПП: с одной, двумя и со всеми управляемыми фазами.
Первый тип применяется для однофазного двигателя для обеспечения надежной защиты от перегрузки, перегрева и снижения влияния электромагнитных помех.
Как правило, схема второго типа помимо полупроводниковой платы управления включает в себя байпасный контактор. После того как двигатель раскрутится до номинальной скорости, байпасный контактор срабатывает и обеспечивает прямую подачу напряжения на электродвигатель.
Трехфазный тип является самым оптимальным и технически совершенным решением. Он обеспечивает ограничение тока и силы магнитного поля без перекосов по фазам.
Зачем же нужно устройство плавного пуска?
Благодаря относительно невысокой цене популярность софтстартеров набирает обороты на современном рынке промышленной и бытовой техники. УПП для асинхронного электродвигателя необходимо для продления его срока службы. Большим преимуществом софтстартера является то, что пуск осуществляется с плавным ускорением, без рывков.
Остались вопросы?
Специалисты ЭНЕРГОПУСК ответят на Ваши вопросы:
8-800-700-11-54 (8-18, Пн-Вт)
Устройство плавного пуска — Википедия
Материал из Википедии — свободной энциклопедии
Текущая версия страницы пока не проверялась опытными участниками и может значительно отличаться от версии, проверенной 2 июля 2013; проверки требуют 18 правок. Текущая версия страницы пока не проверялась опытными участниками и может значительно отличаться от версии, проверенной 2 июля 2013; проверки требуют 18 правок. Внешний вид устройства плавного пуска
Внешний вид устройства плавного пускаУстройство плавного пуска (УПП) — механическое, электротехническое (электронное) или электромеханическое устройство, используемое для плавного пуска (остановки) электродвигателей с небольшим моментом страгивания (например с вентиляторной характеристикой) рабочей машины.
Управление процессом запуска, работы и остановки электродвигателей:
- плавный разгон;
- плавная остановка;
- уменьшение пускового тока;
- согласование крутящего момента двигателя с моментом нагрузки.
Во время пуска крутящий момент за доли секунды часто достигает 150—200 % от номинального, что может привести к выходу из строя механической части привода. При этом пусковой ток может быть в 6—8 раз больше номинального, из-за этого в местной электрической сети возникает падение напряжения. Падение напряжения может создавать проблемы для других нагрузок сети, а если падение напряжения слишком велико, то может не запуститься и сам двигатель. Применение устройств плавного пуска обеспечивает ограничение скорости нарастания и максимального значения пускового тока в течение заданного времени (после применения УПП значение пускового тока уменьшается до 3-4 номинальных). В электронных устройствах плавного пуска ограничение тока достигается путём плавного нарастания напряжения на обмотках электродвигателя. Это позволяет во время пуска удерживать параметры электродвигателя (ток, напряжение и т. д.) в безопасных пределах, что снижает вероятность перегрева обмоток и устраняет рывки в механической части привода, а также вероятность возникновения гидравлических ударов в трубах и задвижках в момент пуска и остановки. В конечном итоге правильно выбранное и настроенное устройство плавного пуска повышает показатели долговечности и безотказности электродвигателя и его привода.
Мгновенное значение электромагнитного момента двигателя зависит не только от угловой скорости, параметров двигателя и параметров системы питания, но и от производных этих величин и их начальных значений[1].
Вариация многих переменных значительно расширяет возможности управления динамическими режимами работы асинхронных электроприводов. Контактная коммутационная аппаратура позволяет реализовать только некоторые частные случаи формирования переходных процессов, связанных с введением в цепи двигателя сопротивлений и гашением его незатухающего магнитного поля, также могут использоваться тормозные колодки, жидкостные муфты, магнитные блокираторы, противовесы с дробью и прочее. Другими словами, возможны частные решения воздействием только на параметры двигателя. Применение в качестве коммутационных аппаратов магнитных усилителей позволяет дополнительно реализовать только воздействие на производную изменения напряжения.
Реализация большинства возможных способов формирования динамических характеристик стала принципиально осуществимой только с появлением полупроводниковых управляемых вентилей, которые из-за бесконтактности, безынерционности и легкости изменения среднего значения пропускаемого тока оказываются почти идеальными коммутирующими элементами для управления асинхронными электродвигателями.
Тиристорные коммутаторы (софтстартеры) и преобразователи частоты на основе управляемых вентилей позволяют сравнительно просто не только задавать требуемый темп изменения приложенного напряжения и создавать необходимые начальные условия, но также осуществлять фазовое регулирование в цепях двигателя и менять параметры системы питающих напряжений. Эти возможности делают не только принципиально возможным, но технически осуществимым и практически целесообразным управление электромагнитными переходными моментами и, следовательно, динамикой асинхронного электропривода.
В зависимости от характера нагрузки устройства плавного пуска обеспечивают различные режимы управления электродвигателем, реализуя ту или иную зависимость между скоростью вращения электродвигателя и выходным напряжением.
Режим с линейной зависимостью между напряжением и частотой (U/f=const) реализуется простейшими преобразователями частоты для обеспечения постоянного момента нагрузки и используется для управления синхронными двигателями или двигателями, подключенными параллельно. Для регулирования электроприводов насосов и вентиляторов используется квадратичная зависимость напряжение/частота (U/f2=const). К более совершенным методам управления относятся метод управления потокосцеплением (Flux Current Control — FCC), и метод бессенсорного векторного управления (Sensorless Vector Control — SVC). Оба метода базируются на использовании адаптивной модели электродвигателя, которая строится с помощью специализированного вычислительного устройства, входящего в состав системы управления преобразователя[2].
УПП, устройство мягкого пуска, плавный пускатель, мягкий пускатель, софтстартер
УБПВД — устройство безударного пуска высоковольтных двигателей.
- К.Н. Лебедев С.А. Бузун. Адаптивные софтстартеры для погружных электронасосных агрегатов: Монография. — Зерноград: Азово-Черноморская государственная агроинженерная академия, 2012. — 96 с.
- И.Я. Браславский, З.Ш. Ишматов, В.Н. Поляков. Энергосберегающий асинхронный электропривод: учебное пособие / Браславский, И.Я.. — Москва: Академия, 2004. — 249 с.
- Л.П. Петров, О.А. Андрющенко, В.И. Капинос. Тиристорные преобразователи напряжения для асинхронного электропривода / Петров Л.П.. — Москва: Энергоатомиздат, 1986. — 200 с.
- Современный уровень разработок асинхронных тиристорных электро-приводов с фазовым управлением / обзорная информация. — Москва: Информэлектро, 1975. — 60 с.
- Л.П. Петров, В.А. Ладензон, М.П. Обуховский, Р.Г. Подзол. Асинхронный электропривод с тиристорными коммутаторами. — Москва: Энергия, 1970. — 128 с.
- М.М. Соколов, Л.П. Петров, Л.Б. Масандилов, В.А. Ладензон. Электромагнитные переходные процессы в асинхронном электроприводе / Соколов М.М.. — Москва: Энергия, 1967. — 200 с.
Плавный пуск асинхронного электродвигателя. Устройство и принцип работы
Плавный пуск асинхронного электродвигателя. Устройство и принцип работы Skip to contentИнформация для электрика
Информация и практические навыки для электрика
Асинхронные электродвигатели, помимо очевидных преимуществ имеют два существенных недостатка – большой пусковой ток (до семи раз больше номинального) и рывок на старте. Данные недостатки негативно влияют на состояние електросетей, требуют применения автоматических выключателей с соответствующей времятоковой характеристикой, создают критические динамические нагрузки на оборудование.
С эффектом запуска мощного асинхронного двигателя знакомы все: «проседает напряжение и сотрясается все вокруг электродвигателя. Поэтому, для уменьшения негативных воздействий были разработаны способы и схемы, позволяющие смягчить рывок и сделать запуск асинхронного двигателя с короткозамкнутым ротором более плавным.
Способы плавного пуска асинхронных двигателей
Кроме негативного влияния на цепи питания и окружение, стартовый импульс электродвигателя вреден и для его обмоток статора, ведь момент увеличенной силы при запуске прикладывается к обмоткам. То есть, сила рывка ротора усиленно давит на обмоточные провода, тем самым убыстряя износ их изоляции, пробой которой называют межвитковым замыканием.
Иллюстрация принципа действия асинхронного электродвигателяПоскольку конструктивно нельзя уменьшить пусковой ток, придуманы способы, схемы и аппараты, обеспечивающие плавный пуск асинхронного двигателя. В большинстве случаев, на производствах с мощными линиями питания и в быту данная опция не является обязательной – так как колебания напряжения и пусковые вибрации не оказывают существенного влияния на производственный процесс.
Графики изменения токов при прямом запуске и при помощи устройств плавного пускаНо существуют технологии, требующие стабильных, не превышающих норм параметров, как э
Теория и расчет преобразователей, устройство плавного пуска расчет
Данный раздел посвящен теоретическим основам частотного регулирования и принципам работы устройства плавного пуска.
Принцип работы преобразователя частоты
Частотный преобразователь — устройство, позволяющее осуществлять регулирование скорости вращения электродвигателей посредством изменения частоты электрического тока.
Для понимания процесса частотного регулирования для начала необходимо вспомнить из курса электротехники принцип работы асинхронного электродвигателя.
Вращение вала электродвигателя происходит за счет магнитного поля создаваемого обмотками статора. Синхронная частота вращения магнитного поля зависит от частоты напряжения питающей сети f и выражается следующей зависимостью:

где p – число пар полюсов магнитного поля.
Под действием нагрузки частота вращения ротора электродвигателя несколько отличается от частоты вращения магнитного моля статора вследствие скольжения s:

Следовательно частота вращения ротора электродвигателя представляет собой зависимость от частоты напряжения питающей сети:

Таким образом требуемую частоту вращения вала электродвигателя np можно получить путем изменения частоты напряжения сети f. Скольжение при изменении частоты вращения не увеличивается, а соответственно потери мощности в процессе регулирования незначительны.
Для эффективной работы электропривода и обеспечения максимальных значений основных характеристик электродвигателя требуется вместе с частотой изменять и питающее напряжение.
Функция изменения напряжения в свою очередь зависит от характера момента нагрузки. При постоянном моменте нагрузки Mc = const напряжение на статоре должно регулироваться пропорционально частоте:

Для случаев вентиляторного режима:

При моменте нагрузки, обратно пропорциональном скорости:

Таким образом, плавное регулирование частоты обеспечивается одновременным регулированием частоты и напряжения на статоре асинхронного двигателя.

Рис 1. Схема частотного преобразователя
На рис. 1. представлена типовая блок-схема низковольтного преобразователя частоты. В нижней части рисунка для каждого блока наглядно изображены графики входных и выходных напряжений и токов.
Сначала напряжение сети (UBX) поступает на вход выпрямителя (1). Далее для сглаживание выпрямленного напряжения (UВЫПР) применяется конденсаторный фильтр (2). Затем уже постоянное напряжение (Ud) подается на вход инвертора (3), где происходит преобразование тока из постоянного обратно в переменный, формируя тем самым выходной сигнал с необходимыми значениями напряжения и частоты. Для получение сигнала синусоидальной формы применяются сглаживающий фильтр (4)
Для более наглядного понимания принципа работы инвертора рассмотрим принципиальную схему частотного преобразователя на рис. 2

Рис. 2 – принципиальная схема низковольтного преобразователя частоты
В основном в инверторах применяется метод широтно-импульсной модуляции (ШИМ). Принцип данного метода заключается в попеременном включении и выключении ключей генератора, формируя импульсы различной длительности (рис. 3). Синусоидальный сигнал получается за счет индуктивности двигателя или применения дополнительного сглаживающего фильтра.

Рис. 3. Выходной сигнал преобразователя частоты
Таким образом, управляя процессом включения-выключения инверторных ключей, мы можем формировать выходной сигнал нужной частоты, а следовательно управлять технологическими параметрами механизма путем изменения частоты вращения привода.
Теория и принцип работы устройства плавного пуска
В связи с особенностями переходных процессов происходящих во время пуска электродвигателя токи обмоток достигают 6-8 кратной величины номинального тока электродвигателя, а вращающий момент на его валу достигает 150-200% от номинального значения. Как следствие это увеличивает риск поломки механической части двигателя, а также приводит к падению напряжения питающей сети.
Для решение данных проблем на практике применяется устройства плавного пуска электродвигателей, обеспечивающие постепенное увеличение токовой нагрузки.
Помимо снижения токовых нагрузок мягкие пускатели позволяют: .
- Снизить нагрев обмоток двигателя;
- Снизить просадки напряжения во время пуска;
- Обеспечить торможение и последующий запуск двигателя в установленный момент времени;
- Снизить гидроудары в напорных трубопроводах при работе в составе привода насоса;
- Снизить электромагнитные помехи;
- Обеспечить комплексную защиту электродвигателя при пропадании фазы, перенапряжении, заклинивании и пр;
- Повысить надежность и долговечность системы в целом.
Принцип работы УПП
Типовая схема устройства плавного пуска представлена на рис. 1

Рис. 1. Типовая схема устройства плавного пуска
Изменением угла открытия тиристоров осуществляется регулирования выходного напряжения УПП. Чем больше угол открытия тиристора — тем больше величина выходного напряжения, питающего электродвигатель.

Рис. 2. Формирование выходного напряжения УПП
Принимая во внимание то что величина крутящего момента асинхронного электродвигателя пропорциональна квадрату напряжения, то снижение напряжения снижает величину вращающего момента вала двигателя. При помощи такого метода пусковые токи электродвигателя снижаются до величины 2…4 IНОМ, при этом время разгона несколько увеличивается. Наглядное изменение механической характеристики асинхронного электродвигателя при понижении напряжении показано на рис. 3

Рис 3. Механические характеристика двигателя
Снижение токовой нагрузки в процессе мягкого пуска электродвигателя наглядно показаны на рис. 4.

Рис. 4. Диаграмма плавного пуска асинхронного электродвигателя показана
На рис. 1. продемонстрирована типовая схема устройства плавного пуска однако стоит отметить, что реальная схема мягкого пускателя будет завесить в первую очередь от условий его эксплуатации. Например, для бытового бытовой инструмента и электродвигателя привода промышленной дробилки требуются различные устройства плавного пуска. Важнейшими параметрами, определяющими режимы работы устройств плавного пуска, являются время пуска и максимальное превышение по току.
В зависимости от этих параметров выделяют следующие режимы работы устройств плавного пуска:
- Нормальный: пуск 10-20 секунд, ток при пуске не более 3,5 Iном.
- Тяжелый: пуск порядка 30 секунд, тока при пуске не превышает 4,5 Iном
- Сверхтяжелый: время разгона не ограничено, системы с большое инерцией, пусковой ток в диапазоне 5,5…8 Iном
Устройства плавного пуска можно разделить на следующие основные группы:
1. Регуляторы пускового момента
Данный тип устройств осуществляет контроль только одной фазы трехфазного двигателя. Контроль одной фазой дает возможность снижать пускового момент электродвигателя двигателя, но при этом снижение пускового тока происходит незначительное. Устройства данного типа не могут применяться для уменьшения токовых нагрузок в период пуска, а также для пуска высокоинерционных нагрузок. Однако они нашли применение в системах с однофазными асинхронными электродвигателями.
2. Регуляторы напряжения без обратной связи
Данный тип устройств работает по следующему принципу: пользователь задает величину начального напряжения и время его нарастания до номинальной величины и наоборот. Регуляторы напряжения без обратной связи могут осуществлять контроль как двух так и трех фаз электродвигателя. Такие регуляторы обеспечивают снижение пускового тока снижением напряжения в процессе пуска.
3. Регуляторы напряжения с обратной связью
Данный тип УПП представляет собой более совершенную модель описанного выше устройств. Наличие обратной связи по позволяет управлять процессом увеличения напряжения добиваясь оптимального режима пуска электродвигателя. Данные о токовой нагрузке позволяет также организовать комплексную защиту электродвигателя от перегрузки, перекоса фаз и т.п.
4. Регуляторы тока с обратной связью
Регуляторы тока с обратной связью представляют собой наиболее совершенные устройства плавного пуска. Принцип работы основан на прямом регулировании тока а не напряжения. Это позволяет добиться наиболее точное управление пуском электродвигателя, а также облегчает настройку и программирование УПП.
Устройство плавного пуска электродвигателя: принцип работы асинхронного электродвигателя
 Асинхронный электродвигатель имеет возможность самостоятельного запуска из-за взаимодействия между вращающимся потоком магнитного поля и потоком обмотки ротора, вызывая высокий ток в нём. В результате статор потребляет большой ток, который к моменту достижения двигателем полной скорости становится больше номинального, что может привести к нагреву двигателя и его повреждению. Для предотвращения этого необходимо устройство плавного пуска электродвигателя (УПП).
Асинхронный электродвигатель имеет возможность самостоятельного запуска из-за взаимодействия между вращающимся потоком магнитного поля и потоком обмотки ротора, вызывая высокий ток в нём. В результате статор потребляет большой ток, который к моменту достижения двигателем полной скорости становится больше номинального, что может привести к нагреву двигателя и его повреждению. Для предотвращения этого необходимо устройство плавного пуска электродвигателя (УПП).
Принцип работы пускателя
Он заключается в том, что устройство регулирует напряжение, приложенное к двигателю во время пуска, контролируя характеристики тока. Для асинхронных двигателей пусковой момент приблизительно пропорционален квадрату пускового тока. Он пропорционален приложенному напряжению. Крутящий момент также можно считать приблизительно пропорциональным приложенному напряжению, таки образом регулируя напряжение во время пуска, ток, потребляемый машиной, и его крутящий момент контролируются устройством и могут быть уменьшены.
Используя шесть SCR в конфигурации, как показано на рисунке устройство плавного пуска может регулировать напряжение, подаваемое на двигатель при запуске от 0 вольт до номинального линейного напряжения. Плавный пуск электродвигателя может осуществляться тремя способами:
- Прямой запуск с применение полного напряжения нагрузки.
- Применяя постепенно пониженное.
- Применение пуска частичной обмотки с помощью стартёра автотрансформатора.
УПП могут быть двух типов:
- Открытое управление: напряжение пуска подаётся с задержкой во времени независимо от тока или скорости двигателя. Для каждой фазы два SCR проводятся сначала с задержкой на 180 градусов в течение соответствующих полуволновых циклов (для которых выполняется каждый SCR). Эта задержка постепенно уменьшается со временем до тех пор, пока приложенное напряжение не достигнет номинального значения. Она также известна, как система временного напряжения. Этот метод фактически не контролирует ускорение двигателя.
- Контроль замкнутого контура: контролируются любые характеристики выходного сигнала двигателя, такие как текущий ток или скорость. Пусковое напряжение изменяется соответственно для получения требуемого отклика. Таким образом, задачей УПП является контроль угла проводимости SCR и управление напряжением питания.
Преимущества плавного пуска
Твердотельные плавные пускатели используют полупроводниковые приборы для временного снижения параметров на клеммах двигателя. Это обеспечивает контроль тока двигателя, чтобы уменьшить крутящий момент предельного значения двигателя. Управление основано на управлении напряжением клемм двигателя на двух или трёх фазах.
Несколько причин, почему этот метод предпочтительнее других:
- Повышенная эффективность: эффективность системы УПП с использованием твердотельных переключателей обусловлена в основном низким состоянием напряжения.
- Управляемый запуск: пусковые параметры можно контролировать, легко изменяя их, что обеспечивает запуск его без каких-либо рывков.
- Управляемое ускорение: ускорение двигателя контролируется плавно.
- Низкая стоимость и размер: это обеспечивается с использованием твердотельных переключателей.
Компоненты твердотельных устройств
 Выключатели питания, такие как SCR, которые подвергаются фазовому контролю для каждой части цикла. Для трехфазного двигателя два SCR подключаются к каждой фазе. Реле плавного пуска электродвигателя должны быть рассчитаны как минимум в три раза больше, чем линейное напряжение.
Выключатели питания, такие как SCR, которые подвергаются фазовому контролю для каждой части цикла. Для трехфазного двигателя два SCR подключаются к каждой фазе. Реле плавного пуска электродвигателя должны быть рассчитаны как минимум в три раза больше, чем линейное напряжение.
Рабочий пример системы для трехфазного асинхронного двигателя. Система состоит из 6 SCR, контрольной логической схемы в виде двух компараторов — LM324 и LM339 для получения уровня и напряжения рампы и оптоизолятора для управления приложением напряжения затвора к SCR на каждой фазе.
Таким образом, управляя длительностью между импульсами или их задержкой, управляемый угол SCR контролируется и регулируется подача питания на этапе пуска двигателя. Весь процесс на самом деле представляет собой систему управления с разомкнутым контуром, в которой контролируется время применения импульсов запуска затвора для каждого SCR.
Основы SCR
SCR (Silicon Controlled Rectifier) представляет собой управляемый стабилизатор мощности постоянного тока с высокой мощностью. Устройства плавного пуска асинхронных двигателей SCR представляет собой четырехслойное кремниевое полупроводниковое устройство PNPN. Оно имеет три внешних терминала и использует альтернативные символы на рисунке 2 (a) и имеет транзисторную эквивалентную схему на рисунке 2 (b).
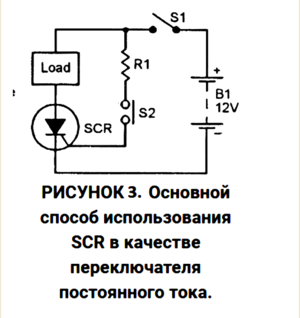
Основной способ использования SCR в качестве переключателя с анодом, положительным относительно катода, управляемым в момент запуска машины.
Основные характеристики SCR можно понять с помощью этих диаграмм. Устройство плавного пуска электродвигателя можно включить и заставить действовать как выпрямитель с прямым смещением кремния, кратковременно применяя к нему ток затвора через S2. SCR быстро (в течение нескольких микросекунд) автоматически защёлкивается во включённое состояние и остаётся включённым даже при удалении привода затвора.
 Это действие показано на рисунке 2 (b) ток начального затвора включается Q1, а ток коллектора Q1 включается Q2, ток коллектора Q2 затем удерживает Q1, даже когда привод затвора удаляется. Потенциал насыщения составляет 1 В или около того и создаётся между анодом и катодом.
Это действие показано на рисунке 2 (b) ток начального затвора включается Q1, а ток коллектора Q1 включается Q2, ток коллектора Q2 затем удерживает Q1, даже когда привод затвора удаляется. Потенциал насыщения составляет 1 В или около того и создаётся между анодом и катодом.
Для включения SCR требуется только короткий импульс затвора. Как только SCR будет зафиксирован, он может быть снова отключён, кратковременно уменьшая его ток анода ниже определённого значения, как правило, несколько миллиампер, в приложениях АС выключение происходит автоматически в точке пересечения нуля в каждом полупериоде.
Значительный коэффициент усиления доступен между затвором и анодом SCR, а низкие значения тока затвора (обычно несколько мА или меньше) могут контролировать высокие значения анодного тока (до десятков усилителей). Большинство SCR имеют анодные номиналы в сотни вольт. Характеристики затвора SCR аналогичны характеристикам транзисторного соединения — эмиттера транзистора (см. Рис. 2 (b)).
Внутренняя ёмкость (несколько pF) существует между анодом и затвором SCR, и резко возрастающее напряжение, появляющееся на аноде, может вызвать достаточный прорыв сигнала к затвору для включения SCR. Этот «эффект скорости» может быть вызван переходными процессами на линии питания и т. д. Проблемы с эффектом скорости можно преодолеть, проводя сеть сглаживания CR между анодом и катодом, чтобы ограничить скорость подъёма до безопасного значения.
Операция с переменной скоростью вращения
 Сетевое напряжение переменного тока (рис. 5) выпрямляется с помощью пассивного диодного моста. Это означает, что диоды срабатывают, когда линейное напряжение больше напряжения на секции конденсатора. Результирующая форма волны имеет два импульса в течение каждого полупериода, по одному для каждого окна диодной проводимости.
Сетевое напряжение переменного тока (рис. 5) выпрямляется с помощью пассивного диодного моста. Это означает, что диоды срабатывают, когда линейное напряжение больше напряжения на секции конденсатора. Результирующая форма волны имеет два импульса в течение каждого полупериода, по одному для каждого окна диодной проводимости.
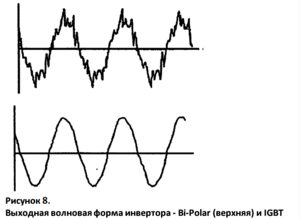
Форма волны показывает некоторый непрерывный ток, когда проводимость переходит от одного диода к следующему. Это типично, когда он используется в звене постоянного тока привода и присутствует некоторая нагрузка. Инверторы используют широко-импульсную модуляцию для создания выходных сигналов. Треугольный сигнал генерируется на несущей частоты, с которой инвертор IGBT переключится.
Эта форма сигнала сравнивается с синусоидальной формой волны на основной частоте, которая должна быть доведена до двигателя. Результатом является волновая форма U, показанная на рисунке.
Выход инвертора может быть любой частотой ниже или выше частоты линии до пределов инвертора и/или механические пределы двигателя. Нужно обратить внимание на то, что привод всегда работает в пределах рейтинга скольжения двигателя.
Процесс регулирования пуска
Сроки включения SCR — это ключ к управлению выходом напряжения для УПП. В течение пуска логическая схема УПП определяет, когда включить SCR. Он не включает SCR в точке, где напряжение идёт от отрицательного к положительному, но ждёт некоторое время после этого. Это известный процесс, называемый как «постепенное восстановление» SCR. Точка включения SCR установлена или запрограммирована тем, что начальный крутящий момент, начальный ток или ограничение тока строго регулируется.
 Результат поэтапного восстановления SCR представляет собой несинусоидальное пониженное напряжение на выводах двигателя, которое показано на рисунках. Поскольку двигатель является индуктивным, а ток отстаёт от напряжения, SCR остаётся включённым и проводит, пока ток не достигнет нуля. Это происходит после того, как напряжение стало отрицательным. Выход напряжения индивидуального SCR.
Результат поэтапного восстановления SCR представляет собой несинусоидальное пониженное напряжение на выводах двигателя, которое показано на рисунках. Поскольку двигатель является индуктивным, а ток отстаёт от напряжения, SCR остаётся включённым и проводит, пока ток не достигнет нуля. Это происходит после того, как напряжение стало отрицательным. Выход напряжения индивидуального SCR.
Если сравнивать с формой полного напряжения, можно видеть, что пиковое напряжение совпадает с полным волновым напряжения. Однако ток не увеличивается до того же уровня, что и при приложении полного напряжения из-за индуктивного характера двигателей. Когда это напряжение подаётся на двигатель, выходной ток выглядит, как на рисунке.
Поскольку частота напряжения равна так же, как и линейная, частота тока тоже одинакова. SCR поэтапно переходят к полной проводимости, пробелы в токе заполняются до тех пор, пока волновая форма не будет выглядеть так же, как у двигателя.
Характеристики двигателя с использованием УПП
Такой плавный пуск асинхронного электродвигателя в отличие от привода переменного тока, имеет характеристики тока в сети и тока двигателя всегда одинаковыми. Во время запуска изменение тока зависит напрямую от величины приложенного напряжения. Крутящий момент двигателя изменяется, как квадрат приложенное напряжение или тока.
Наиболее важным фактором при оценке является крутящий момент двигателя. Стандартные двигатели производят приблизительно 180% от момента полной нагрузки при запуске. Следовательно, 25%-е снижение параметров будет равно крутящему моменту полной нагрузки. Если двигатель потребляет 600% от полного тока нагрузки при запуске, то ток в этой схеме уменьшит пусковой ток от 600% до 450% нагрузки.
Схемы подключения пускателей
 Существует два варианта, с помощью которых стартер осуществляет запуск электродвигателя: стандартная схема и внутри треугольника.
Существует два варианта, с помощью которых стартер осуществляет запуск электродвигателя: стандартная схема и внутри треугольника.
Стандартная схема. Пускатель соединён последовательно с линейным напряжением, подаваемым на двигатель.
Внутри треугольника существует ещё одна схема, по которой подключён пускатель, называется схемой внутренней дельты. В этой схеме два кабеля, которые подключаются к одному из двигателей, присоединяются непосредственно к источнику питания I/P, а другой кабель будет подключён через пускатель. Одна особенность этой схемы заключается в том, что пускатель можно использовать для больших двигателей, например, для двигателей мощностью 100 кВт, поскольку фазные токи делятся на 2 части.
Устройства и способы пуска асинхронного электродвигателя — прямой, звезда-треугольник, плавный и через частотный преобразователь

Асинхронные электрические двигатели с короткозамкнутым ротором благодаря своей крайней простоте получили широкое распространение, особенно в трехфазных сетях, где им не требуются дополнительные пусковые или смещенные по фазе обмотки.
При правильной эксплуатации асинхронный электродвигатель становится практически вечным – единственное, что в нем может потребовать замены, это подшипники ротора.
Однако ряд особенностей асинхронных двигателей определяет специфику их пускового режима: отсутствие обмотки якоря означает отсутствие противоЭДС индукции в момент включения обмоток статора, а следовательно – высокий пусковой ток.
Если для маломощных электрических двигателей это не критично, то в промышленных электродвигателях пусковые токи могут достигать очень высоких значений, что приводит к просадкам напряжения в сети, перегрузкам подстанций и электропроводки.
ПРЯМОЙ ПУСК АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ
Как уже было сказано выше, прямое включение обмотки асинхронного двигателя может применяться только при низкой мощности. В этом случае пусковой ток превышает номинальный в 5-7 раз, что не является проблемой для коммутационного оборудования и электропроводки.
Основной проблемой прямого пуска становится подключение нескольких электродвигателей к маломощной подстанции или генератору.
Включение в сеть нового электродвигателя может вызвать настолько сильную просадку напряжения, что уже работающие двигатели остановятся, а новому мотору не хватит пускового момента, чтобы стронуться с места.
Пусковой ток асинхронного двигателя достигает максимального значения в момент включения и плавно снижается до номинального по мере раскрутки ротора. Следовательно, для уменьшения времени перегрузки сети асинхронный двигатель должен включаться с минимальной нагрузкой, если это возможно.
Мощные токарные станки, гильотины для рубки металла не имеют фрикционных муфт, и все их вращающиеся механизмы раскручиваются в момент включения электродвигателя. В этом случае длительные просадки напряжения приходится прямо закладывать в проектируемое для них электроснабжение.
ПЛАВНЫЙ ПУСК АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ
Логичным способом снижения пускового тока стало снижение напряжения, подаваемого на статор в момент запуска, с его постепенным увеличением при разгоне двигателя.
Простейший и наиболее старый способ плавного пуска – реостатный пуск электродвигателя: в цепь статора последовательно включается несколько мощных резисторов, последовательно закорачиваемых контакторами.
Также могут использоваться и дроссели высокой индуктивности (реакторы), а также автотрансформаторы.
Подобный способ плавного пуска имеет очевидные недостатки:
Проблематичность автоматизации.
Работа контакторов не привязывается к реальному значению тока, они либо переключаются вручную, либо перебираются с помощью реле времени автоматически.
Усложнение пуска под нагрузкой.
Так как крутящий момент асинхронного двигателя пропорционален квадрату напряжения питания, снижение напряжения в момент пуска в 2 раза приведет к снижению крутящего момента в 4 раза. Применение плавного пуска с электродвигателями, напрямую подключенными к нагрузке, значительно увеличивает время выхода на рабочие обороты.
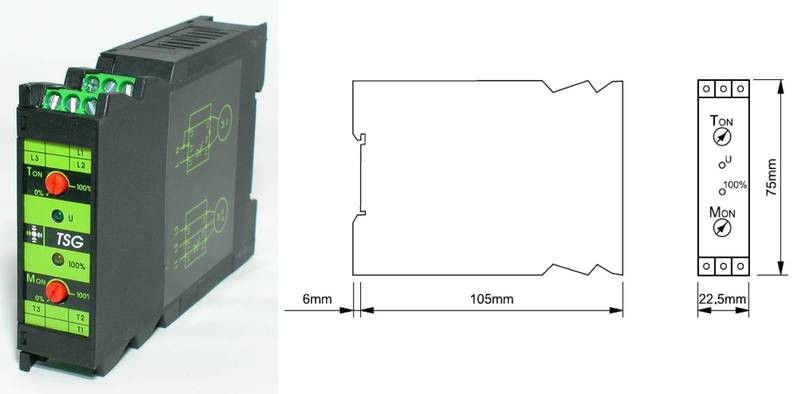
Совершенствование силовой электроники позволило создать компактные автоматические устройства плавного пуска (также называемые софтстартерами от английского soft start – «мягкий пуск») для асинхронных электродвигателей, устанавливаемые на стандартную монтажную рейку электрощитов. Они обеспечивают не только плавный разгон, но и торможение двигателя, позволяя регулировать параметры токов пуска и остановки в различных режимах:
- Постоянное токоограничение.
- В момент запуска ток ограничивается на заданном превышении номинального и удерживается на этой величине все время разгона двигателя. Обычно используется ограничение на уровне 200-300% номинального тока. Перегрузка становится малозначительной, хотя ее длительность возрастает.
- Формирование тока.
- В данном случае токовая кривая в момент включения двигателя имеет больший наклон, после чего софтстартер переходит в режим токоограничения.
Такой метод плавного пуска применяется при подключении к маломощным подстанциям или генераторам для снижения стартовой нагрузки, однако пусковой момент электродвигателя в данном случае минимален. Для устройств, лишенных холостого хода электродвигателя, использовать формирование тока с пологой стартовой кривой невозможно.
- Ускоренный пуск (кик-старт).
- Применяется с двигателями, напрямую приводящими нагрузку, так как иначе их пусковой крутящий момент может оказаться недостаточным для страгивания ротора.
В этом случае устройство плавного пуска допускает кратковременное превышение пускового тока в несколько раз (фактически осуществляется прямая коммутация), по истечении заданного времени ток снижается до двух-трехкратного превышения номинала.
- Останов на выбеге.
- При отключении двигателя напряжение с него снимается полностью, вращение якоря продолжается по инерции. Наиболее простой способ коммутации, применимый при небольших мощностях и малой инерции привода.
Однако в момент разрыва цепи происходит сильный индуктивный выброс, приводящий к сильному искрению в контакторах. На мощных электродвигателях, а также при высоких рабочих напряжениях данный способ отключения неприемлем.
- Линейное снижение напряжения.
- Применяется для более плавной остановки двигателя. Нужно помнить, что крутящий момент двигателя при этом снижается нелинейно из-за квадратичной зависимости момента от напряжения, то есть снижение момента происходит наиболее резко в начале кривой.
Отключение питания происходит при минимальном токе в обмотке, соответственно коммутирующие выключатели практически не изнашиваются образованием искры между контактами.
Для снижения нагрузок при остановке применяется управляемое снижение напряжения:
- вначале ток снижается минимально;
- затем кривая начинает снижаться круче.
Снижение крутящего момента электродвигателя при этом близко к линейному. Этот способ управления остановом электродвигателя применяется в устройствах с высокой инерционностью привода.
При использовании такого рода устройств плавного пуска пусконаладочные работы заключаются в настройке нужного типа кривой пускового тока и, в случае использования режимов формирования тока или ускоренного старта, настройке длительности временного интервала начального участка кривой.
Применение устройств плавного пуска позволяет автоматизировать пусковой режим, но его главный минус остается – либо приходится закладывать в устройство возможность холостого хода электродвигателя, либо допускать кратковременные перегрузки сети, раскручивая мотор и нагрузку с кик-стартом.
ПУСК ПО СХЕМЕ ЗВЕЗДА-ТРЕУГОЛЬНИК
Другим способом запуска, использующимся на трехфазных двигателях, является перекоммутация обмоток: в момент пуска обмотки соединяются звездой, по мере разгона ротора обмотки переводятся в нормальное включение треугольником.

Такой метод пуска фактически является частным случаем способа пуска асинхронного электродвигателя на пониженном напряжении, так как напряжение на обмотках при этом снижаетсяпримерно в 1,73 раза.
Подобный способ пуска может быть легко реализован с помощью набора контакторов с ручным управлением или с приводом от реле времени, поэтому достаточно дешев и распространен. Основные недостатки этого способа:
- При отказе одного из контакторов произойдет нарушение коммутации, в результате чего либо станет невозможным пуск, либо значительно снизится мощность двигателя.
- Снижение напряжения и тока является фиксированным.
- Крутящий момент двигателя при включении обмоток звездой уменьшается, поэтому запуск желательно также производить без нагрузки.
ПУСК ЭЛЕКТРОДВИГАТЕЛЯ ЧЕРЕЗ ЧАСТОТНЫЙ ПРЕОБРАЗОВАТЕЛЬ
Наиболее гибкий способ управления не только режимом пуска, но и рабочими характеристиками асинхронного электродвигателя – это применение частотного преобразователя. По своей сути частотный преобразователь представляет собой узкоспециализированный инвертор:
- входное напряжение в нем выпрямляется;
- затем заново преобразуется в переменное, но уже с заданной частотой и амплитудой.

Это происходит благодаря работе генератора широтно-импульсной модуляции (ШИМ), который создает серию прямоугольных импульсов заданной частоты и скважности (отношения длительности импульса к его периоду). Генерируемые импульсы управляют силовыми ключами, коммутирующими выпрямленное напряжение питания на обмотки выходного трансформатора.
Как осуществляется плавный пуск через частотный преобразователь?
В данном случае становится возможным плавное изменение не только напряжения, но и частоты питающего электродвигатель напряжения. Благодаря тому, что ШИМ-генератор частотного преобразователя легко может управляться с обратной связью по потребляемому току, становится возможным пусковой режим, в котором ток не превышает номинальный – таким образом перегрузка питающей сети фактически отсутствует.
Однако такой пусковой режим требует значительного усложнения частотного преобразователя, поэтому для управления асинхронными электродвигателями обычно используется комбинация с отдельным устройством плавного пуска (УПП).
© 2012-2020 г. Все права защищены.
Представленные на сайте материалы имеют информационный характер и не могут быть использованы в качестве руководящих и нормативных документов
Плавный пуск асинхронного электродвигателя — назначение устройства и схема его подключения
То, что в асинхронных электродвигателях с короткозамкнутым ротором при пуске появляются высокие токи, известно. Теоретически эта проблема решена довольно-таки давно (плавные способы пуска известны), но вот на практике эти технологии использовались редко. В настоящее время многое изменилось. Научно-технический прогресс принес в последнее время много разработок в электронной технике, благодаря чему стали производиться компактные устройства, очень эффективные и удобные, которые обеспечивали плавный пуск асинхронного электродвигателя. Их еще называют софтстартеры.

Эти устройства помогает запускать асинхронный электродвигатель без рывков и нагрузки, что обеспечивает долгосрочную эксплуатацию и самого двигателя, и исполнительных механизмов, которые напрямую соединены с валом мотора. Обычно в качестве таких устройств выступают редукторы разных модификаций.
- Если в схеме подключения не использовать устройство плавного пуска, то пусковой момент приводит к постепенному разрушению двигателя, особенно быстро выходят из строя подшипники.
- Но и не только подшипники. Высокое пусковое напряжение и ток, превышающие номинальный в 6-10 раз, становятся причиной износа изоляции обмоток и пробивки медного провода, подгорают контакты.
- К тому же подводящий питающий кабель рассчитывается с учетом именно максимального значения пускового тока. А это повышение его сечения, а, значит, повышение стоимости проводки, плюс перерасход самой электроэнергии.
- При этом необходимо учитывать тот факт, что электродвигатель при пуске забирает на себя большое напряжение, что создает «просадку» напряжения в смежных электрических сетях. А это негативно влияет на технологическое оборудование в этих сетях, потому что напряжение в них резко падает. Это, во-первых, приводит к некорректной работе оборудования, во-вторых, снижает срок его эксплуатации.
- В добавлении можно сказать, что пуск асинхронного двигателя создает достаточно серьезные электромагнитные помехи, что в свою очередь становится причиной нарушения работы электронных приборов и оборудования. При этом необязательно чтобы эти приборы были запитаны в электрическую схему электродвигателя. Начинают плохо работать даже те, которые просто рядом расположены с ним.
И еще есть один момент, который иногда не учитывается. Если при пусковом моменте асинхронный электродвигатель перегрелся или вообще сгорел, то используемая в его конструкции трансформаторная сталь теряет свои технические характеристики, слишком высока температура перегрева. Если такой двигатель отремонтировать, то гарантированно, что его мощность будет ниже номинальной приблизительно на треть. Поэтому такие моторы устанавливать на старое место не рекомендуется. Он просто не потянет нагрузки, для которых агрегат предназначен.
Вот такие негативные моменты есть у асинхронного двигателя, который работает без устройства плавного пуска.
Назначение устройства плавного пуска
Начнем с того, что это устройство объединяет в себе две функции: плавного пуска и торможения. Производители комплектуют их еще дополнительными опциями: связь с автоматикой и защитными функциями.

Теперь схема пуска асинхронного двигателя. В основе этого процесса лежит постепенный подъем напряжения, что обеспечивает медленный разгон вращения вала мотора (ротора). Это и приводит к снижению пусковых токов. Есть в этом деле три параметра, которые определяют плавный пуск. Это:
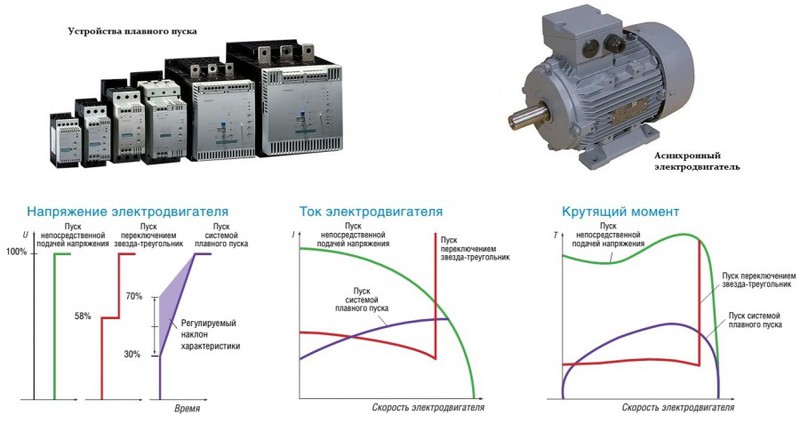
- Начальное напряжение. Оно должно быть меньше номинального на 40-70 процентов.
- Время, за которое вал электродвигателя разгонится до номинальной скорости. Здесь процесс происходит так: сначала подается напряжение скачком, которое доводится до начального, после чего уже напряжение увеличивается плавно до номинального.
- Время торможения.
Применяя эту технологию пуска с установкой и подключением софтстартеров, можно отказаться от системы реле, включателей, магнитных пускателей и контакторов, и при этом создается надежная защита от перегрузок и перегревов, от пробивки изоляции и возникновения электромагнитных помех. Но самое главное, что конструкция устройства плавного пуска асинхронных двигателей очень проста. Их легко подсоединить к двигателю, главное точно подобрать прибор по параметрам. Вот схема такого подключения:

Как правильно выбрать устройство плавного пуска
- В основе выборе лежит тот самый максимальный пусковой ток. В устройстве величина тока должна быть больше пускового у электродвигателя.
- Обязательно надо обратить внимание, сколько пусков может за час выдерживать устройство. Обычно этот показатель в паспорте софтстартера указывается. Поэтому его придется подбирать под технологию, в которой установлен сам электродвигатель. Где-то его будут включать один раз в день, а где-то за час могут включить и отключить несколько раз.
- И, конечно, это питающее напряжение. В паспорте устройства плавного пуска этот показатель обязательно указывается.
В принципе, это все, что можно было бы сказать о таком эффекте, как плавный пуск асинхронного двигателя.