Пуск синхронного двигателя
Одним из главных недостатков синхронных двигателей является сложность их пуска в ход. Пуск синхронных двигателей может быть осуществлен при помощи вспомогательного пускового двигателя или путем асинхронного пуска. Недостатком асинхронного пуска является большой пусковой ток (в 5—7 раз больший рабочего тока). Пусковой ток вызывает падение напряжения в сети, а это отражается на работе других потребителей. Для уменьшения пускового тока применяют пуск при пониженном напряжении с помощью реактора или автотрансформатора.
Пуск синхронного двигателя при помощи вспомогательного двигателя
Пуск синхронного двигателя при помощи вспомогательного двигателя. Если ротор синхронного двигателя с возбужденными полюсами раскрутить другим, вспомогательным двигателем до скорости вращения поля статора, то магнитные полюсы статора, взаимодействуя с полюсами ротора, заставят ротор вращаться далее самостоятельно без посторонней помощи, в такт с полем статора, т. е. синхронно (откуда эти двигатели и получили свое название).
На рис. 405 показана схема пуска синхронного двигателя 1 с помощью вспомогательного асинхронного двигателя (2).
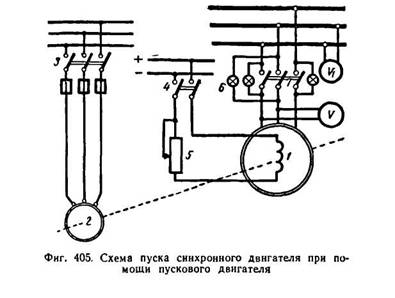
Для осуществления пуска необходимо, чтобы число пар полюсов вспомогательного (пускового) двигателя было меньше числа пар полюсов синхронного двигателя, по причине того что при этих условиях вспомогательный асинхронный двигатель может развернуть ротор синхронного двигателя до синхронной скорости.
Порядок пуска синхронного двигателя следующий. Включая рубильник 3, пускают вспомогательный асинхронный двигатель 2, который разворачивает ротор синхронного двигателя 1 до скорости, соответствующей скорости поля статора. Скорость вращения вспомогательного двигателя определяется по тахометру 1. Затем, включая рубильник 4 постоянного тока, возбуждают полюсы ротора. Чтобы включить синхронный двигатель в сеть трехфазного тока, его нужно синхронизировать. Для этого реостатом 5 устанавливают такое возбуждение, чтобы напряжение обмотки статора по вольтметру V было равно напряжению сети, указываемому вольтметром V1.
Электролампы 6, включенные параллельно ножам рубильника 7 трехфазной сети, при разомкнутом рубильнике будут мигать. Сначала мигание будет частым, но если изменять скорость вращения вспомогательного асинхронного двигателя, то лампы будут мигать все реже и реже. Синхронный двигатель можно включить в сеть трехфазного тока рубильником 7 тогда, когда все три лампы одновременно погаснут. Ротор двигателя при этом входит в синхронизм и может далее вращаться самостоятельно. Теперь вспомогательный двигатель 2 рубильником 3 можно отключить от сети.
Сложность пуска и необходимость вспомогательного двигателя являются существенными недостатками этого способа пуска синхронных двигателей. Поэтому в настоящее время он применяется редко.
Асинхронный пуск
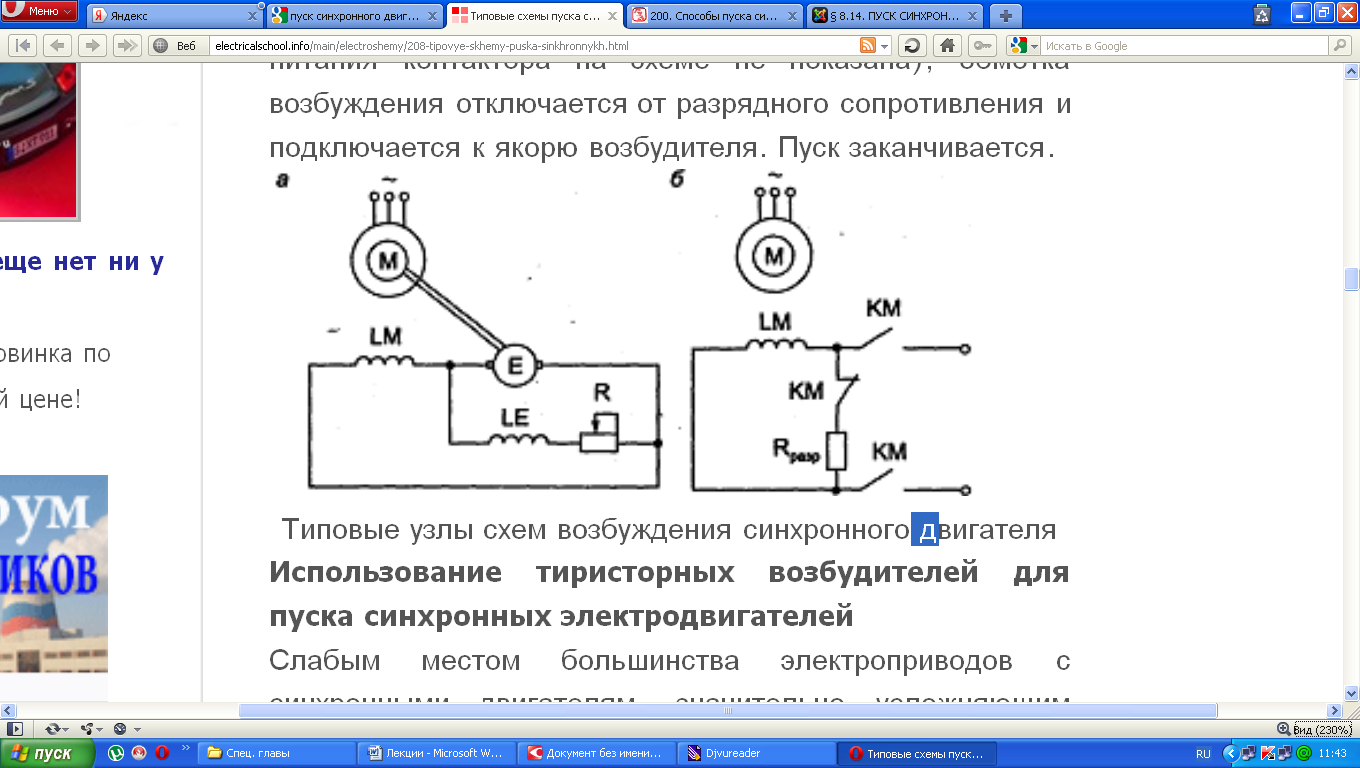
Для осуществления этого способа пуска в полюсных наконечниках полюсов ротора укладывается дополнительная короткозамкнутая обмотка. Так как во время пуска в обмотке возбуждения двигателя наводится большая э.д.с, то по соображениям безопасности она замыкается рубильником на разрядное сопротивление.
При включении напряжения трехфазной сети в обмотку статора синхронного двигателя возникает вращающееся магнитное поле, которое, пересекая короткозамкнутую (пусковую) обмотку, заложенную в полюсных наконечниках ротора, индуктирует в ней токи.
16. Пуск синхронных двигателей.
Одним из главных недостатков синхронных двигателей является сложность их пуска в ход. Пуск синхронных двигателей может быть осуществлен при помощи вспомогательного пускового двигателя или путем асинхронного пуска.
Пуск синхронного двигателя при помощи вспомогательного двигателя. Если ротор синхронного двигателя с возбужденными полюсами развернуть другим, вспомогательным двигателем до скорости вращения поля статора, то магнитные полюсы статора, взаимодействуя с полюсами ротора, заставят ротор вращаться далее самостоятельно без посторонней помощи, в такт с полем статора, т. е. синхронно (откуда эти двигатели и получили свое название).
Для
осуществления пуска необходимо, чтобы
число пар полюсов асинхронного двигателя
было меньше числа пар полюсов синхронного
двигателя, ибо при этих условиях
вспомогательный асинхронный двигатель
может развернуть ротор синхронного
двигателя до синхронной скорости.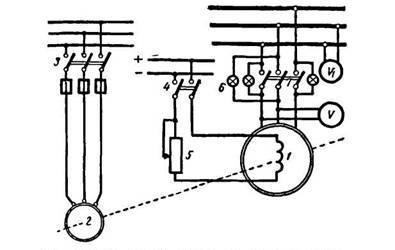
Электролампы 6, включенные параллельно ножам рубильника 7 трех-фазной сети, при разомкнутом рубильнике будут мигать. Сначала мигание будет частым, но если изменять скорость вращения вспомогательного асинхронного двигателя, то лампы будут мигать . все реже и реже. Синхронный двигатель можно включить в сеть трехфазного тока рубильником 7 тогда, когда все три лампы одновременно погаснут. Ротор двигателя при этом входит в синхронизм и может далее вращаться самостоятельно. Теперь вспомогательный двигатель 2 рубильником 3 можно отключить от сети.
Сложность пуска и необходимость вспомогательного двигателя являются существенными недостатками этого способа пуска синхронных двигателей. Поэтому в настоящее время он применяется редко.
Асинхронный пуск синхронного двигателя. Для осуществления этого способа пуска в полюсных наконечниках полюсов ротора укладывается дополнительная короткозамкнутая обмотка. Так как во время пуска в обмотке возбуждения 1 двигателя наводится большая э. д. с, то по соображениям безопасности она замыкается рубильником 2 на сопротивление 3
При
включении напряжения трехфазной сети
в обмотку статора 4 синхронного двигателя
возникает вращающееся магнитное поле,
которое, пересекая короткозамкнутую
(пусковую) обмотку, заложенную в полюсных
наконечниках ротора, индуктирует в ней
токи.
Эти токи, взаимодействуя с вращающимся полем статора, приведут ротор во вращение. При достижении ротором наибольшего числа оборотов (95—97% синхронной скорости) рубильник 2 переключают так, чтобы обмотку ротора включить в сеть постоянного напряжения.
Недостатком асинхронного пуска является большой пусковой ток (в 5—7 раз больший рабочего тока). Пусковой ток вызывает падение напряжения в сети, а это отражается на работе других потребителей. Для уменьшения пускового тока применяют пуск при пониженном напряжении с помощью реактора 2 или автотрансформатора.
В настоящее время применяют почти исключительно асинхронный пуск синхронных двигателей ввиду его простоты и надежности. Существуют также схемы автоматического асинхронного пуска синхронных двигателей
17. Сравнение синхронных и асинхронных двигателей.
Обмотки статора обоих двигателей получают питание от сети трехфазного переменного тока. Для питания обмотки возбуждения синхронного двигателя требуется, кроме того, источник электрической энергии постоянного тока, правда, относительно небольшой мощности.
Асинхронный пуск синхронных двигателей несколько сложнее пуска асинхронных двигателей с короткозамкнутым ротором. В отношении пусковых свойств асинхронные двигатели с фазным ротором имеют весьма существенные преимущества перед синхронными двигателями.
Частота вращения синхронных двигателей остается постоянной при изменении нагрузки, тогда как у асинхронных двигателей даже при их работе на естественной характеристике она несколько изменяется.
Асинхронные двигатели дают возможность регулировать частоту вращения различными способами (изменением числа пар полюсов, измерением частоты напряжение источника питания). Синхронные двигатели относятся к двигателям с нерегулируемой частотой вращения.
Воздействуя
на ток возбуждения синхронного двигателя,
можно в широких пределах изменять его
коэффициент мощности. Можно, в частности,
заставить синхронный двигатель работать
с cos
Из-за малых потерь мощности в роторе, а также в обмотке статора при работе с высоким cosφ к.п.д. синхронных двигателей оказывается больше, а масса и габаритные размеры меньше, чем у асинхронных двигателей.
Учитывая указанные достоинства синхронных двигателей, стараются везде, где это возможно, вместо асинхронных двигателей применять синхронные. Они применяются обычно в установках средней и большой мощности при редких пусках, в случаях, когда не требуется электрического регулирования частоты вращения. Синхронные двигатели используются, например, для привода насосов, компрессоров, вентиляторов, генераторов постоянного тока преобразовательных установок.
Асинхронный пуск синхронного двигателя
Разгон ротора двигателя при таком пуске происходит в асинхронном режиме. При включении обмотки статора в трехфазную сеть переменного тока, момент вращения возникает от взаимодействия вращающегося магнитного поля статора с токами, наведенными в стержнях короткозамкнутой пусковой обмотки, расположенной на роторе. Под действием этого момента двигатель разгоняется и достигает почти синхронной частоты вращения, а после подачи постоянного тока в обмотку возбуждения он втягивается в синхронизм. При асинхронном пуске синхронного двигателя обмотку возбуждения замыкают на активное сопротивление. Обмотку возбуждения нельзя оставлять разомкнутой, так как в ней вследствие большого числа витков наведется при пуске значительное напряжение, опасное для изоляции обмотки.
U – образные характеристики синхронного двигателя
U
– образные характеристики показывают
зависимость линейного тока Iл и коэффициента мощности cos
φ синхронного двигателя от его тока
возбуждения 

 при
при 

 ,
, 
 .
.

Рис. 3. U – образные характеристики синхронного двигателя.
Известно,
что если ток IВ меньше нормального, двигатель недовозбужден
и работает как индуктивная нагрузка.
Линейный ток IЛ1 отстает по фазе от напряжения на угол
φ .
.

Рис. 4. Векторная диаграмма токов синхронного двигателя.
При нормальном возбуждении линейный ток IЛ совпадает с напряжением и имеет минимальное значение, cos φ = 1. При дальнейшем увеличении тока возбуждения двигатель перевозбужден и работает, как емкостная нагрузка. Линейный ток IЛ2 опережает напряжение на угол φ2, cos φ уменьшается, а линейный ток IЛ2 растет.
Компенсация реактивной мощности
Большинство
приемников электрической энергии
обладают индуктивным сопротивлением
(асинхронные двигатели, трансформаторы
и др.). Если параллельно приемнику
электрической энергии, например,
асинхронному двигателю, включить
синхронный двигатель, работающий в
режиме перевозбуждения (рис. 5), индуктивная
составляющая тока асинхронного двигателя  и емкостная составляющая тока синхронного
двигателя
и емкостная составляющая тока синхронного
двигателя – соответственно и реактивные мощности
будут взаимно компенсироваться и на
данном участке цепи повыситсяcos
φ.
(рис. 6).
– соответственно и реактивные мощности
будут взаимно компенсироваться и на
данном участке цепи повыситсяcos
φ.
(рис. 6).

Рис. 5. Упрощенная однолинейная схема параллельного включения асинхронного и синхронного двигателей.
М1 – асинхронный двигатель, АД;
М2 – синхронный двигатель, СД;
РА, РС – активные мощности двигателей.

Рис. 6. Векторная диаграмма токов при параллельной работе асинхронного и синхронного двигателей.
Результирующий cos φ будет зависеть от разности реактивных составляющих токов АД и СД – соответственно и реактивных мощностей.
 ,
,
где  – активные мощности, потребляемые
соответственно асинхронным и синхронным
двигателями;
– активные мощности, потребляемые
соответственно асинхронным и синхронным
двигателями;
 –реактивные
мощности соответственно асинхронного
и синхронного двигателей.
–реактивные
мощности соответственно асинхронного
и синхронного двигателей.
Эффективность повышения коэффициента мощности путем использования синхронного двигателя по сравнению со статическими конденсаторами состоит в том, что синхронная машина одновременно используется как двигатель, имеющий нагрузку на валу, и как конденсатор, генерирующий реактивную мощность, величину которой можно легко изменить.
Пуск синхронного двигателя
Предположим, что обмотка якоря синхронного двигателя подключена к сети трехфазного тока, обмотка возбуждения — к источнику постоянного тока, а ротор неподвижен. МДС обмотки якоря будет создано вращающееся магнитное поле, благодаря взаимодействию которого с проводниками ротора на последний будет действовать момент. Направление момента зависит от положения вращающегося поля относительно ротора и при вращении поля будет изменяться. Сказанное иллюстрируется рис. 11.14, где вращающееся поле якоря условно заменено вращающимся кольцевым магнитом, а ротор — постоянным магнитом. Независимо от числа полюсов синхронного двигателя при частоте сети 50 Гц направление момента, действующего на неподвижный ротор, изменяется 100 раз в секунду. Вследствии большой частоты изменения направления момента и значительной инерционности ротора последний не сможет прийти во вращение.
Если предварительно разогнать ротор до частоты вращения n, близкой к частоте вращения n0поля якоря, а затем подключить обмотку возбуждения к источнику постоянного тока, то под действием момента двигателя частота вращения ротора дополнительно возрастет и наступит равенство: n = n0. Ротор будет вращаться далее синхронно с полем якоря.
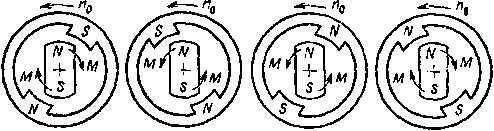
Рис. 11.14. К пояснению пуска синхронного двигателя
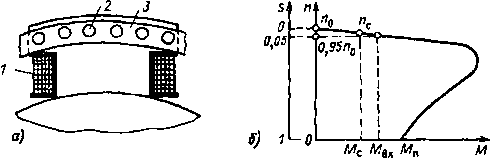
Рис. 11.15. Пусковая обмотка синхронного двигателя с явновыраженными полюсами (а) и его механическая характеристика (б)
Для разгона синхронного двигателя используют так называемый асинхронный пуск синхронного двигателя. С этой целью ротор снабжают кроме обмотки возбуждения 1(рис. 11.15, а) пусковой обмоткой. Последняя состоит из стержней 2, уложенных в пазы полюсных наконечников и замыкаемых с торцевых сторон накоротко сегментами 3. Пусковая обмотка подобна короткозамкнутой обмотке ротора асинхронного двигателя.
Пуск двигателя может быть произведен по схеме, изображенной на рис. 11.8, в следующем порядке. Обмотка ротора с помощью переключателя П замыкается на резистор r1, после чего обмотка якоря подключается к трехфазной сети. Разгон ротора синхронного двигателя, так же как и асинхронного, происходит за счет взаимодействия вращающегося поля якоря и проводников короткозамкнутой (пусковой) обмотки, в которой под действием индуктированных ЭДС возникают токи. Когда ротор разгонится до частоты вращения, близкой к частоте вращения поля якоря, обмотку возбуждения отключают от резистора и подключают к источнику постоянного тока. Для контроля частоты вращения ротора можно использовать амперметр А с нулем посредине шкалы, частота колебаний стрелки которого уменьшается по мере разгона ротора. Обмотку возбуждения подключают к резистору в период разгона ротора для того, чтобы предохранить ее изоляцию от пробоя недопустимо большим напряжением, которое может возникнуть на выводах обмотки при пуске двигателя.
Поскольку синхронный двигатель пускается как асинхронный, он имеет в период пуска свойства асинхронного двигателя, в частности механическую характеристику, изображенную на рис. 11.15, б. Как известно, чтобы можно было произвести пуск двигателя, должно быть выполнено соотношение Мп > Мс. Однако для пуска синхронного двигателя этого оказывается недостаточно. Установлено, что двигатель надежно входит в синхронизм, если подключение обмотки возбуждения к источнику постоянного тока происходит при скольжении s ≤ 0,05 (частота вращения n> 0,95n0). Момент двигателя Мвх, соответствующий s = 0,05, называется входным. Для того чтобы двигатель мог разогнаться до скольжения s ≤ 0,05, должно быть выполнено, очевидно, условие Мвх > Мс.
Соотношения между пусковым, входным и номинальным моментами лежат для различных двигателей примерно в следующих пределах:
Mп/Mном = 0,7 ÷ 2,9; Mвх/Mном = 0,6 ÷ 2,3.
При необходимости ограничения пускового тока или пускового момента синхронного двигателя можно использовать те же способы, что в случае пуска асинхронного двигателя с короткозамкнутым ротором.
Пуск и регулирование частоты синхронных двигателей
⇐ ПредыдущаяСтр 9 из 10Следующая ⇒Синхронный двигатель не имеет начального пускового момента. Если его подключить к сети переменного тока, когда ротор неподвижен, а по обмотке возбуждения проходит постоянный ток, то за один период изменения тока, электромагнитный момент будет дважды изменять свое направление. Ротор обладает инерцией и не может быть в течение одного полупериода разогнан до синхронной частоты вращения. Следовательно, для пуска синхронного двигателя необходимо разогнать его ротор с помощью внешнего момента до частоты вращения, близкой к синхронной.
Для пуска могут быть используются следующие способы:
1. Асинхронный пуск.
2. Пуск с помощью разгонного двигателя.
3. Частотный пуск.
При пуске с помощью разгонного двигателя обмотка статора отключена от сети, а на обмотку возбуждения подается напряжение постоянного тока. Специальный разгонный двигатель разворачивает ротор синхронного двигателя до частоты вращения близкой к синхронной. Затем обмотка статора включается в сеть, а разгонный двигатель выключают.
Асинхронный пуск аналогичен пуску асинхронного двигателя. Для этого синхронный двигатель снабжают специальной коротко-замкнутой пусковой обмоткой, выполненной по типу «беличья клетка» и уложенной в полюсных наконечниках ротора. Чтобы увеличить сопротивление стержней, клетку изготовляют из латуни. Обмотку возбуждения предварительно замыкают на гасящий резистор, сопротивление которого в 8—12 раз превышает активное сопротивление обмотки возбуждения с целью избежать перенапряжений.
При включении трехфазной обмотки статора в сеть образуется вращающееся магнитное поле статора, которое будет пересекать пусковую обмотку и наведет в ней ЭДС и ток. Вращающееся магнитное поле статора, взаимодействуя с полем пусковой обмотки, создает электромагнитные силы F и вращающий момент. Момент разгонит ротор до частоты вращения, близкой к синхронной (s<0,05). После этого обмотку возбуждения переключают с гасительного резистора на возбудитель. При подаче питания на обмотку возбуждения ротор втягивается в синхронизм.
Возможна схема с постоянно подключенным к обмотке возбуждения возбудителем. В этом случае во время пуска пусковую обмотку можно считать замкнутой накоротко, так как сопротивление возбудителя весьма мало. С уменьшением скольжения до s =0,3-0,4 возбудитель возбуждают. В обмотку возбуждения подается постоянный ток, обеспечивающий при s<0,05 втягивание ротора в синхронизм. Такая схема более простая, но имеет худшие пусковые характеристики, чем схема с гасительным резистором, из-за так называемого одноосного эффекта.
Его суть в том, что ток, индуцируемый в обмотке возбуждения при пуске двигателя, создает обратный электромагнитный момент. При частоте вращения двигателя, меньшей 0,5n1 он является ускоряющим, а при большей частоте — тормозящим. Особенно резко проявляется действие обратного поля при n=0,5n1. 
Пусковой обмотка на роторе существенно уменьшает обратное магнитное поле и создаваемый им момент. Однако этот момент, складываясь с асинхронным моментом пусковой обмотки (кривая 1), создает в кривой результирующего пускового момента провал при частоте вращения, равной половине синхронной (кривая 4). Этот провал тем больше, чем больше ток в обмотке возбуждения. Включение гасительного резистора на период пуска уменьшает ток в этой обмотке и улучшает форму кривой пускового момента.
Если обмотку возбуждения при пуске не отключить от возбудителя, то по якорю возбудителя в период пуска проходит переменный ток, что может вызвать искрение щеток. Поэтому такую схему пуска применяют в случае небольшого нагрузочного момента — не более 50% от номинального, при сравнительно небольшой мощности двигателя.
Свойства двигателя при асинхронном пуске характеризуются на-чальным пусковым моментом Мп при s = 1 и входным моментом М0,05 s = 0,05. В технических данных эти моменты и ток приводятся в долях номинального момента и тока в синхронном режиме.
Особой разновидностью синхронных двигателей являются асинхронизированные двигатели, напоминающие по своему устройству асинхронные двигатели с фазным ротором. От последних они отличаются, тем, что имеют больший воздушный зазор и увеличенное сечение вторичной трехфазной обмотки. При пуске обмотка ротора двигателя замыкается на пусковой реостат. Затем обмотка ротора присоединяется к возбудителю (или выпрямительному устройству), возбуждается постоянным током, и ротор втягивается в синхронизм. Такие двигатели обладает пусковыми характеристиками асинхронного двигателя с фазным ротором и рабочими свойствами синхронного двигателя.
При частотном пуске регулируемым преобразователем плавно повышают частоту от нуля до номинальной. Частота вращения поля статора также плавно изменяется от нуля до синхронной. Ротор, следуя за полем статора, также плавно разгоняется. Одновременно с изменением частоты необходимо регулирование питающего напряжения.
Частоту вращения синхронного двигателя можно регулировать изменением числа пар полюсов. При этом необходимо менять число пар полюсов как на статоре, так и на роторе, что приводит к значительному усложнению конструкции и удорожанию машины.
Поэтому на практике частоту вращения регулируют изменением частоты питающего напряжения. При неизменных значениях нагрузочного момента и тока якоря необходимо выдерживать условие
U/f1 = const,
т. е. изменять напряжение U, подаваемое к электродвигателю от преобразователя частоты, пропорционально изменению частоты. При изменении нагрузки необходимо изменять поток возбуждения Фf и ток If. В чистом виде частотное регулирование применяется только при очень малых мощностях, когда нагрузочные моменты невелики, а инерция приводного механизма мала. При больших мощностях такие условия имеются только в некоторых типах электроприводов, например в электроприводах вентиляторов.
Для синхронных двигателей, применяемых в электроприводах с большим моментом инерции приводного механизма, необходимо очень плавно изменять частоту питающего напряжения, чтобы двигатель не выпал из синхронизма. Для таких электроприводов применяется метод частотного регулирования с самосинхронизацией, при котором управление преобразователем частоты осуществляется от системы датчиков положения ротора. В результате напряжение подается на каждую фазу двигателя при углах нагрузки q < 900. При таком регулировании автоматически обеспечиваются условия устойчивой работы двигателя и его перегрузочная способность определяется только перегрузочной способностью преобразователя частоты.
Синхронные двигатели, регулируемые путем изменения частоты с самосинхронизацией, называют вентильными двигателями.
Синхронный компенсатор
Синхронный компенсатор представляет собой синхронный двигатель, работающий без нагрузки на валу; при этом по обмотке якоря проходит практически только реактивный ток. Синхронный компенсатор может работать в режиме улучшения cosφ или в режиме стабилизации напряжения.
Нагрузка сети носит активно-индуктивный характер – ток нагрузки Iн отстает по фазе от напряжения сети Uc. Для улучшения cosφ сети синхронный компенсатор работает в режиме перевозбуждения. Ток возбуждения регулируется так, чтобы ток якоря I1 синхронного компенсатора опережал на 90° напряжение сети Uc(рис. а) и был примерно равен реактивной составляющей тока нагрузки Iн р. В результате сеть загружается только активным током нагрузки Iн а.
В отличие от батарей конденсаторов компенсатор может компенсировать как индуктивную (при перевозбуждении) так и емкостную (при недовозбуждении) составляющие тока.
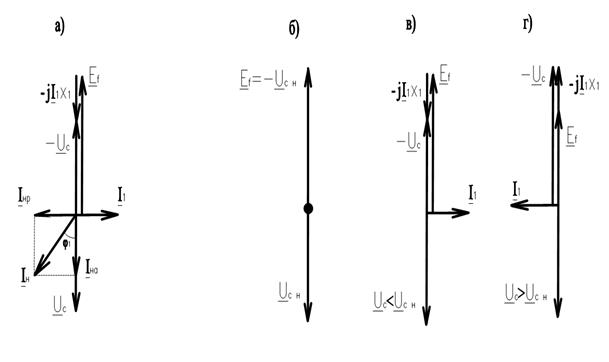
В режиме стабилизации напряжения устанавливается ток возбуждения синхронного компенсатора чтобы ЭДС компенсатора Еf равнялась номинальному напряжению сети Ucн (рис. б). В сети имеется ток Iн, создающий падение напряжения ΔU= IнRccosφ + IнXc sinφ, где Rc и Хс — активное и индуктивное сопротивление сети; φ — угол сдвига фаз между векторами напряжения и тока сети.
Если напряжение сети понижается из-за возрастания тока нагрузки и становится меньше Ucн, то синхронный компенсатор забирает из сети реактивный опережающий ток I1 (рис. в). Это уменьшает падение напряжения на величину ΔUк= I1Xc. При повышении напряжения в сети, когда Uc > Ucн, синхронный компенсатор загружает сеть реактивным отстающим током I1 (рис. г), что приводит к увеличению падения напряжения на величину
ΔUк= I1Xc. Недостаток метода — синхронный компенсатор загружает линию реактивным током, увеличивая потери в ней.
Синхронные компенсаторы выпускаются мощностью от 10 до
100 МВА и по конструкции имеют следующие отличия от синхронного двигателя:
— не имеют выходного конца вала;
— вал не передает вращающий момент и выполняется менее массивным;
— уменьшен воздушный зазор и размеры обмотки возбуждения;
— имеет более массивную магнитную систему для получения большого значения МДС;
-имеет явнополюсную конструкцию при числе полюсов 6 или 8.
Синхронный компенсатор должен быть оснащен автоматическим регулятором возбуждения, который при изменении режима напряжения в узле так регулирует его ток возбуждения, чтобы напряжение на зажимах компенсатора оставалось постоянным.
Энергетика синхронных машин
Часть мощности, потребляемой синхронной машиной, идет на компенсацию потерь, которые включают в себя:
1. Потери на возбуждение ΔРв..
2. Механические потери ΔРмех — это потери на трение в подшипниках и потери на вентиляцию. Они зависят от частоты вращения.
3. Магнитные потери ΔРст в основном имеют место в сердечнике статора, который подвергается перемагничиванию полем ротора. Они состоят из потерь на вихревые токи и перемагничивание. Потери в стали зависят от значения магнитной индукции, марки и толщины листов стали из которой набран сердечник якоря и частоты перемагничивания.
4. Электрические потери имеют место в обмотках статора 
5. Добавочные потери ΔРдоп учитывают потери на пульсацию магнитного потока, потери, вызванные поверхностным эффектом и др. Они равны 0,25 – 0,5% полезной мощности генератора
Механические и магнитные не зависят от нагрузки. Их называют постоянными. Электрические потери зависят от нагрузки машины, поэтому эти потери называются переменными.
На рисунке приведены энергетические диаграммы синхронных генераторов и двигателей при возбуждении от возбудителя (рис. а), а также от сети переменного тока (рис. а).
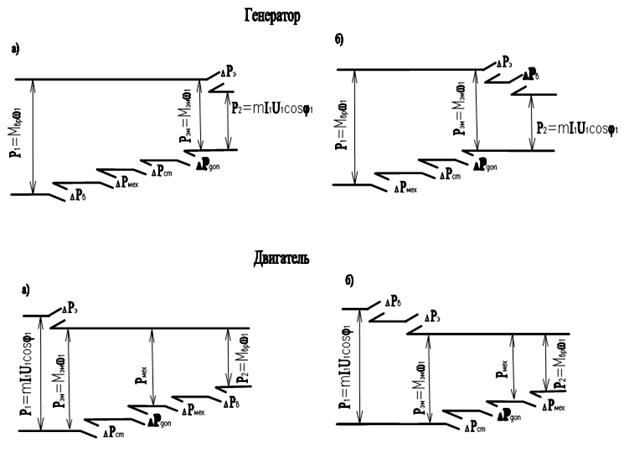
К генераторам подводится механическая мощность Р1= Мврω1, за счет которой покрываются потери холостого хода, состоящие из механических потерь ΔРмех, потерь в стали ΔРст и добавочных потерь ΔРдоп. Если возбудитель приводится от вала генератора, то потери в возбудителе и в цепи возбуждения ΔРв также покрываются за счет механической мощности. Остаток — электромагнитная мощность Рэм= Мэмω1 передается магнитным полем индуктора якорю и преобразуется в его обмотке в электрическую мощность. Часть этой мощности идет на потери в обмотке якоря ΔРэ, а остальная мощность передается на зажимы генератора и является полезной мощностью
Р2 =mU1I1 cosφ1 (рис. а). Если генератор выполнен с самовозбуждением, то с его зажимов снимается мощность ΔРв, часть которой идет на потери в цепи возбуждения (рис. б), а остаток — полезная мощность Р2 отдается в сеть.
Коэффициент полезного действия:
У двигателей потребляемая мощность Р1 =mU1I1 cosφ1 поступает из электрической сети. За ее счет покрываются электрические потери ΔРэ в обмотке якоря и мощность возбуждения ΔРв при возбуждении от сети переменного тока. Оставшаяся часть преобразуется в электромагнитную мощность Рэм= Мэмω1, связанную с вращающимся магнитным полем. За счет этого поля покрываются потери в 


 стали ΔРст и добавочные потери ΔРдоп, а остальное передается ротору в виде механической мощности Рмех. Механическая мощность должна покрыть механические потери ΔРмех и мощность ΔРв, потребляемую возбудителем. Оставшаяся часть механической мощности — мощность на валу является полезной мощностью двигателя Р2= Мврω1.
стали ΔРст и добавочные потери ΔРдоп, а остальное передается ротору в виде механической мощности Рмех. Механическая мощность должна покрыть механические потери ΔРмех и мощность ΔРв, потребляемую возбудителем. Оставшаяся часть механической мощности — мощность на валу является полезной мощностью двигателя Р2= Мврω1.
Энергетические диаграммы показывают, что преобразование энергии в синхронной машине более сложно, чем это описывалось простейшими формулами и векторными диаграммами. Подключения синхронного двигателя к сети и синхронизации еще недостаточно, чтобы машина создала вращающий момент на валу — сначала должны быть покрыты потери в обмотке якоря и в стали. Если к валу генератора, синхронизированного с сетью, подведена механическая мощность, то это еще не значит, что эта машина стала отдавать в сеть электрическую мощность — генератор сначала должен покрыть потери в своей обмотке якоря.
Учет всех факторов, включая потери в стали, существенно усложняет и векторные диаграммы, и расчетные формулы. Поэтому в инженерных расчетах обычно пользуются упрощенной теорией синхронной машины, лишь по мере необходимости вводя дополнительные факторы, уточняющие и одновременно усложняющие эту теорию.
Качания синхронных машин
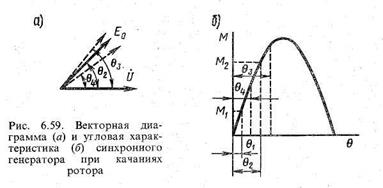
Допустим, что машина работает при некоторой нагрузке и развивает электромагнитный момент M1 =Mвн1, соответствующий углу Θ1 (рис. 6.59, а и б). Если резко увеличить внешний момент до величины Mвн2, то нагрузочный угол будет увеличиваться до величины Θ2, соответствующей новому значению электромагнитного момента M2 =Mвн2. Однако из-за инерции ротора нагрузочный угол, увеличиваясь, достигает значения Θ3 > Θ2, а затем под действием синхронизирующего момента начинает уменьшаться до величины Θ4 < Θ2. В результате возникают колебания нагрузочного угла вокруг установившегося значения Θ2, которые сопровождаются колебаниями частоты вращения ротора, называемые качаниями. Если при качаниях угол Θ превысит критическое значение, то машина выпадет из синхронизма.
 |
Собственные колебания синхронной машины называются свободными колебаниями. Частота собственных колебаний синхронных машин невелика (0,5- 2,0 Гц), что объясняется большим моментом инерции ротора. Период свободных колебаний ротора относительно синхронно вращающегося поля при параллельной работе с сетью: 
где J — момент инерции вращающихся частей;
ω — угловая скорость вращения ротора;
рс=dРЭМ/dq — удельная синхронизирующая мощность;
р – число пар полюсов машины.
При качаниях с изменением угла Θ изменяется мощность машины и ток якоря. На наличие колебаний указывают колебания стрелок амперметра и вольтметра, включенных в цепь якоря. Собственные колебания часто наблюдаются у машин, работающих параллельно с сетью, при холостом ходе.
Для уменьшения амплитуды качаний и ускорения их затухания на роторе располагается короткозамкнутая демпферная (успокоительная) обмотка. При качаниях в демпферной обмотке при изменении частоты вращения ротора индуцируется ЭДС, по ней проходит ток и возникает асинхронный демпфирующий момент: 
где D=ma/ω – коэффициент демпфирования;  .
.
Действие демпферной обмотки подобно действию механического демпфера, потери на трение в котором успокаивают колебания механизма (например, сельсина). При отсутствии демпфирования процесс колебания совершается без потерь энергии, свободные колебания становятся незатухающими, а в некоторых случаях могут даже увеличивать свою амплитуду, т. е. происходит самораскачивание синхронной машины. Из-за явления самораскачивания во многих случаях оказывается невозможной параллельная работа с сетью малонагруженных генераторов малой мощности (до10-20 кВт) без демпферной обмотки.
Колебания ротора синхронной машины могут быть вынужденными, если на него действует периодически изменяющийся внешний момент. Они возникают в синхронных генераторах, приводимых во вращение от поршневых машин, и в синхронных двигателях, служащих для привода поршневых компрессоров. Если частота вынужденных колебаний близка к частоте свободных колебаний, то возникают резонансные явления, при которых колебания угла Θ достигает больших значений и машина выпадает из синхронизма. Поэтому для уменьшения неравномерности вращающего момента на валу устанавливают маховик.
Асинхронный пуск синхронного двигателя
При пуске синхронного двигателя его вращающий момент равен нулю, т. е. двигатель нужно раскрутить до частоты вращения, которая близка к синхронной. Иногда для этого применяется специальный разгонный асинхронный двигатель малой мощности, а двигатель синхронизируется с сетью по примеру генератора при включении на параллельную работу.
Чаще всего применяется другой вид пуска. Для приспособления двигателя к такому пуску при явно полюсном роторе в полюсные наконечники закладывают пусковую короткозамкнутую обмотку, которая состоит из медных или латунных стержней. Она похожа на беличье колесо асинхронной машины и занимает небольшую часть окружности ротора.
Пуск двигателя можно разделить на два этапа: I — асинхронный набор частоты вращения без возбуждения постоянным током; II — втягивание в синхронизм после включения постоянного тока возбуждения. Первый этап такого пуска характеризуется тем, что обмотку возбуждения отключают от источника постоянного тока и замыкают активное сопротивление Rпуск , которое во много раз превышает активное сопротивление обмотки возбуждения. Нельзя оставлять обмотку возбуждения разомкнутой, потому что вращающееся поле способно индуктировать в ней большую э. д. с., которая опасна для целости изоляции.
Однако следовало бы замыкать эту обмотку накоротко, из-за того что в ней возникает большой однофазный ток, способный тормозить ротор при достижении им половины синхронной частоты вращения. Чаще всего для уменьшения пусковых токов применяют включение двигателя через пусковой автотрансформатор либо через реактивную катушку. При пуске замыкают выключатель 2, через который соединяются по схеме «звезда» три фазные обмотки автотрансформатора АТ. Для того чтобы подать на вход автотрансформатора напряжение сети, следует замкнуть рубильник 1, т. е. на зажимы статора синхронного двигателя СД подается пониженное с по- мощью автотрансформатора линейное напряжение трехфазной системы, под действием которого ротор двигателя начинает вращение как короткозамкнутый ротор асинхронного двигателя.
Если скольжение ротора мало, нужно разомкнуть рубильник, в результате чего напряжение на зажимах двигателя немного повысится, так как только часть каждой из фазных обмоток автотрансформатора является реактивной катушкой, которая включена последовательно с фазной обмоткой двигателя и при этом ограничивает своим сопротивлением величину пускового тока. Затем двигатель включается на полное напряжение сети через замыкание рубильника. Однако, пока не включили постоянный ток, ротор вращается асинхронно.
Пуск заканчивают включением постоянного тока возбуждения переключателем. Двигатель приобретает синхронную частоту вращения под действием электромагнитных сил и развивает необходимый вращающий момент. Такой пуск не требует операций по синхронизации двигателя с сетью и может быть автоматизирован.
Для пуска мощных синхронных двигателей можно улучшить условия пуска и работы через применение для питания цепи возбуждения управляемых кремниевых вентилей — тиристоров.
Синхронный двигатель Назначение и область применения
Синхронные машины, являются машинами переменного тока. Применяются в качестве двигателя и генератора.
Синхронные двигатели применяются в основном в приводах большой мощности. Мощность их достигает нескольких десятков мегаватт. На тепловых станциях, металлургических заводах, шахтах, Холодильниках приводят в движение насосы, и другие механизмы, работающие с неизменной скоростью. Синхронные двигатели могут работать с различной реактивной мощностью. Таким образом, Эти двигатели позволяют улучшить коэффициент мощности предприятия. Однако стоимость приводов с синхронным двигателями выше, чем с асинхронными.
Специальные двигатели малой мощности используют в устройствах, где строгое постоянство скорости, электрочасы, автоматические самопишущие приборы, устройства с программным управлением и др.
Н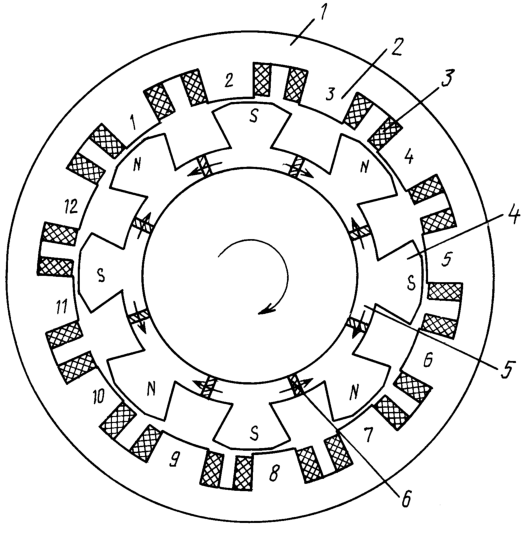 а
крупных подстанциях электрических
систем устанавливают специальные
синхронные машины, работающие в режиме
холостого хода и отдающие в сеть только
реактивную мощность, которая необходима
для асинхронных двигателей. Эти машины
называют синхронными компенсаторами.
а
крупных подстанциях электрических
систем устанавливают специальные
синхронные машины, работающие в режиме
холостого хода и отдающие в сеть только
реактивную мощность, которая необходима
для асинхронных двигателей. Эти машины
называют синхронными компенсаторами.
Устройство синхронного двигателя с возбуждением от постоянных магнитов
Изобретение относится к области использования трехфазных синхронных машин для выработки электроэнергии. Устройство состоит из расположенных на одном валу трехфазного синхронного двигателя и трехфазного синхронного генератора, которые выполнены с возбуждением от постоянных магнитов. Ротор и статор двигателя и генератора имеют явно выраженные полюса. Обмотки статора намотаны вокруг полюсов статора. Постоянные магниты возбуждения в двигателе и генераторе размещены в спинках ротора между его полюсами. В центре полюсов ротора генератора находятся плоские компенсационные постоянные магниты, размещенные в плоскостях, проходящих через ось генератора.
Пуск синхронного двигателя
Одним из главных недостатков синхронных двигателей является сложность их пуска в ход. Пуск синхронных двигателей может быть осуществлен при помощи вспомогательного пускового двигателя или путем асинхронного пуска.
Пуск синхронного двигателя при помощи вспомогательного двигателя. Если ротор синхронного двигателя с возбужденными полюсами развернуть другим, вспомогательным двигателем до скорости вращения поля статора, то магнитные полюсы статора, взаимодействуя с полюсами ротора, заставят ротор вращаться далее самостоятельно без посторонней помощи, в такт с полем статора, т. е. синхронно (откуда эти двигатели и получили свое название).
Д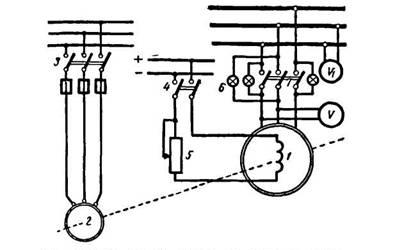 ля
осуществления пуска необходимо, чтобы
число пар полюсов асинхронного двигателя
было меньше числа пар полюсов синхронного
двигателя, ибо при этих условиях
вспомогательный асинхронный двигатель
может развернуть ротор синхронного
двигателя до синхронной скорости.
ля
осуществления пуска необходимо, чтобы
число пар полюсов асинхронного двигателя
было меньше числа пар полюсов синхронного
двигателя, ибо при этих условиях
вспомогательный асинхронный двигатель
может развернуть ротор синхронного
двигателя до синхронной скорости.
Порядок пуска синхронного двигателя следующий. Включая рубильник 3, пускают вспомогательный асинхронный двигатель 2, который разворачивает ротор синхронного двигателя 1 до скорости, соответствующей скорости поля статора. Скорость вращения вспомогательного двигателя определяется по тахометру1. Затем, включая рубильник 4 постоянного тока, возбуждают полюсы ротора. Чтобы включить синхронный двигатель в сеть трехфазного тока, его нужно синхронизировать так же, как и при включении синхронного генератора на параллельную работу. Для этого реостатом 5 устанавливают такое возбуждение, чтобы напряжение обмотки статора по вольтметру V было равно напряжению сети, указываемому вольтметром V1.
Электролампы 6, включенные параллельно ножам рубильника 7 трех-фазной сети, при разомкнутом рубильнике будут мигать. Сначала мигание будет частым, но если изменять скорость вращения вспомогательного асинхронного двигателя, то лампы будут мигать . все реже и реже. Синхронный двигатель можно включить в сеть трехфазного тока рубильником 7 тогда, когда все три лампы одновременно погаснут. Ротор двигателя при этом входит в синхронизм и может далее вращаться самостоятельно. Теперь вспомогательный двигатель 2 рубильником 3 можно отключить от сети.
Сложность пуска и необходимость вспомогательного двигателя являются существенными недостатками этого способа пуска синхронных двигателей. Поэтому в настоящее время он применяется редко.
Асинхронный пуск синхронного двигателя. Для осуществления этого способа пуска в полюсных наконечниках полюсов ротора укладывается дополнительная короткозамкнутая обмотка. Так как во время пуска в обмотке возбуждения 1 двигателя наводится большая э. д. с, то по соображениям безопасности она замыкается рубильником 2 на сопротивление 3
П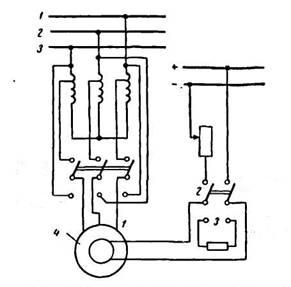 ри
включении напряжения трехфазной сети
в обмотку статора 4 синхронного двигателя
возникает вращающееся магнитное поле,
которое, пересекая короткозамкнутую
(пусковую) обмотку, заложенную в полюсных
наконечниках ротора, индуктирует в ней
токи.
ри
включении напряжения трехфазной сети
в обмотку статора 4 синхронного двигателя
возникает вращающееся магнитное поле,
которое, пересекая короткозамкнутую
(пусковую) обмотку, заложенную в полюсных
наконечниках ротора, индуктирует в ней
токи.
Эти токи, взаимодействуя с вращающимся полем статора, приведут ротор во вращение. При достижении ротором наибольшего числа оборотов (95—97% синхронной скорости) рубильник 2 переключают так, чтобы обмотку ротора включить в сеть постоянного напряжения.
Недостатком асинхронного пуска является большой пусковой ток (в 5—7 раз больший рабочего тока). Пусковой ток вызывает падение напряжения в сети, а это отражается на работе других потребителей. Для уменьшения пускового тока применяют пуск при пониженном напряжении с помощью реактора 2 или автотрансформатора.
В настоящее время применяют почти исключительно асинхронный пуск синхронных двигателей ввиду его простоты и надежности. Существуют также схемы автоматического асинхронного пуска синхронных двигателей