Простой преобразователь частоты для асинхронного электродвигателя.
РадиоКот >Схемы >Питание >Преобразователи и UPS >Простой преобразователь частоты для асинхронного электродвигателя.
Итак коль уж асинхронный двигатель так распространён и трехфазная система напряжения созданная М. О. Доливо-Добровольским так удобна. А современная элементная база так хороша. То сделать преобразователь частоты –это лишь вопрос личного желания и некоторых финансовых возможностей. Возможно кто то скажет « Ну, зачем мне инвертор , я поставлю фазосдвигающий конденсатор и все решено» . Но при этом обороты не покрутишь и в мощности потеряешь и потом это не интересно.
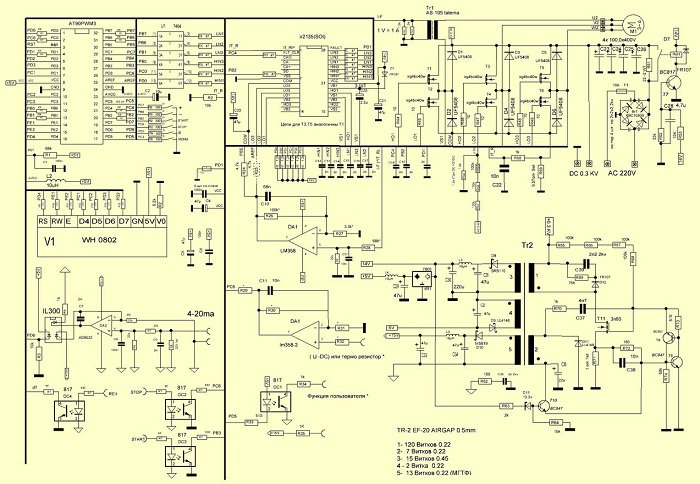
Возьмём за основу – в быту есть однофазная сеть 220в, народный размер двигателя до 1 кВт. Значить соединяем обмотки двигателя треугольником. Дальше –проще, понадобится драйвер трехфазного моста IR2135(IR2133) выбираем такой потому, что он применяется в промышленной технике имеет вывод SD и удобное расположение выводов. Подойдёт и IR2132 , но у неё dead time больше и выхода SD нет. В качестве генератора PWM выберем микроконтроллер AT90SPWM3B — доступен, всем понятен, имеет массу возможностей и недорого стоит, есть простой программатор -https://real.kiev.ua/avreal/. Силовые транзисторы 6 штук IRG4BC30W выберем с некоторым запасом по току — пусковые токи АД могут превышать номинальные в 5-6 раз. И пока не ставим «тормозной» ключ и резистор, будем тормозить и намагничивать перед пуском ротор постоянным током, но об этом позже …. Весь процесс работы отображается на 2-х строчном ЖКИ индикаторе. Для управления достаточно 6 кнопок (частота +, частота -, пуск, стоп, реверс, меню).
Я вовсе не претендую на законченность конструкции и предлагаю брать данную конструкцию за некую основу для энтузиастов домашнего электропривода. Приведённые здесь платы были сделаны под имеющиеся в моём распоряжении детали.
Конструктивно инвертор выполнен на двух платах – силовая часть ( блок питания , драйвер и транзисторы моста , силовые клеммы) и цифровая часть (микроконтроллер + индикатор ). Электрически платы соединены гибким шлейфом. Такая конструкция выбрана для перехода в будущем на контроллер TMS320 или STM32 или STM8.
Блок питания собран по классической схеме и в комментариях не нуждается. Микросхема IL300 линейная опто развязка для управления током 4-20Ма. Оптроны ОС2-4 просто дублируют кнопки «старт, стоп, реверс» для гальванически развязанного управления. Выход оптрона ОС-1 «функция пользователя» (сигнализация и пр.)
Сразу замечу некоторые узлы и элементы вовсе не обязательны. Для того что бы просто крутить двигатель , не нужно внешнее управление током 4-20 Ма. Нет необходимости в трансформаторе тока, для оценочного измерения подойдёт и токовый шунт. Не нужна внешняя сигнализация. При мощности двигателя 400 Вт и площади радиатора 100см2 нет нужды в термодатчике.
ВАЖНО! – имеющиеся на плате кнопки управления изолированы от сети питания только пластмассовыми толкателями. Для безопасного управления необходимо использовать опторазвязку.
Возможные изменения в схеме в зависимости от микропрограммы.
Усилитель DA-1 можно подключать к трансформатору тока или к шунту. Усилитель DA-1-2 может быть использован для измерения напряжения сети или для измерения сопротивления терморезистора если не используется термодатчик PD-1.
В случае длинных соединительных проводов необходимо на каждый провод хотя бы надеть помехоподавляющие кольцо. Имеют место помехи. Так например –пока я этого не сделал у меня «мышь» зависала.
Так же считаю важным отметить проверку надёжности изоляции АД –т.к. при коммутации силовых транзисторов выбросы напряжение на обмотках могут достигать значений 1,3 Uпит.
Общий вид.
Немного про управление.
Начитавшись книжек с длинными формулами в основном описывающих как делать синусоиду при помощи PWM. И как стабилизировать скорость вращения вала двигателя посредством таходатчика и ПИД регулятора. Я пришёл к выводу –АД имеет достаточно жёсткую характеристику во всём диапазоне допустимых нагрузок на валу.
Поэтому для личных нужд вполне подойдет управление описанное законом Костенко М.П. или как его ещё называют скаляроное. Достаточное для большинства практических случаев применения частотно регулируемого электропривода с диапазоном регулирования частоты вращения двигателя до 1:40. Т.е. грубо говоря мы в самом простом случае делаем обычную 3-х фазную розетку с переменной частотой и напряжением меняющимися в прямой зависимости. С небольшими «но» на начальных участках характеристики необходимо выполнять IR компенсацию т.е. на малых частотах нужно фиксированное напряжение . Втрое «но» в питающие двигатель напряжение замешать 3 гармонику. Всё остальное сделают за нас физические принципы АД. Более подробно про это можно прочесть в документе AVR494.PDF
Далее не буду углубляться в теорию и описание мат моделей АД. Это и без меня достаточно хорошо изложили профессора ещё в 60-х.
Но ни в коем случае не стоит недооценивать сложности управления АД. Все мои упрощения оправданны только некоммерческим применением инвертора.
Плата силовых элементов.
В программе V-1.0 для AT90SPWM3B реализовано
1- Частотное управление АД .Форма напряжения синусоида с 3 гармоникой.
2- Частота задания 5 Гц -50 Гц с шагом 1 Гц. Частота ШИМ 4 кГц.
3- Фиксированное время разгона –торможения
4- Реверс (только через кнопку СТОП)
5- Разгон до заданной частоты с шагом 1 Гц
6 – Индикация показаний канала АЦП 6 (разрядность 8 бит., оконный фильтр апертура 4 бита)
я использую этот канал для замера тока шунта.
8- Обработка сигнала авария от мс IR2135
Торможение двигателя принудительное – без выбега. При этом нужно помнить – если на валу будет висеть огромный вентилятор или маховик то напряжение на звене постоянного тока может достичь опасных значений. Но я думаю вертолёты с приводом от АД строить никто не будет
Функции микропрограммы в будущих версиях
1 -намагничивание ротора перед пуском
2- торможение постоянным током
3 –прямой реверс
4 – частота задания 1 -400 Гц.
5 – ограничение, контроль тока двигателя.
6 — переключаемые зависимости U/F
7 – контроль звена постоянного тока.
Испытания.
Данная конструкции была проверена с двигателем 0.18кВт и 0.4 кВт и 0.8 кВт. Все двигатели остались довольны.
Только при малых оборотах и долговременной работе необходимо принудительное охлаждение АД.
Строка для программатора
av_28r4.exe -aft2232 -az +90pwm3b -e -w -v -fckdiv=1,psc2rb=0,psc1rb=0,psc0rb=0,pscrv=0,bodlevel=5 -c01.hex
Небольшое «вечернее» видео испытаний
Файлы:
плата микроконтроллера -layout5.0
силовой модуль -layout5.0
Программа для МК
Схема
схема S_plan7 -архив rar
Все вопросы в Форум.
Как вам эта статья? | Заработало ли это устройство у вас? |
Драйвер для трехфазного двигателя своими руками
Трёхфазные двигатели постоянного тока довольно часто применяются в быту и промышленности. Для их управления требуется техническое средство, преобразующее сигналы малой мощности в токи, способные управлять моторами.
Для этой цели существуют схемы различной степени сложности. Все они отличаются друг от друга либо мощностью, либо элементной базой, на основе которой они изготовлены. Рассмотрим для начала простейшие схемы.
Транзистор
По существу, это наипростейший драйвер двигателя постоянного тока, предназначенный выполнить свою функцию. Диод, подключенный параллельно обмоткам мотора, защитит от возгорания элементов микросхемы в момент остановки электродвигателя, когда ЭДС самоиндукции создаст на обмотках резкий скачок напряжения. Транзистор КТ315 позволит:
- регулировать ток I< 1 А и напряжение U< 40 В;
- включать/отключать двигатель в одном направлении.
Для двухстороннего управления необходимо более сложное устройство.
Н-мост
Составление электроэлементов соответствующим образом (по типу Н-моста) позволит управлять мотором в обе стороны. H-мост представлен на чертеже:
Где INA, INB — входные сигналы управления;
VCC — электропитание моторов, в несколько раз превышающее напряжения управляющего сигнала;
GND — общая земля.
При подаче положительного сигнала на один из входов, электродвигатель будет вращаться в ту или иную сторону. Обычно, схема драйвера кроме H-моста, дополняется защитными диодами, фильтрами, опторазвязками и другими улучшениями. Самым популярным чипом драйвером является IR2110.
Рабочая схема Н-моста с IR2110
H-мост предназначается для управления моторами тогда, когда потребляемая мощность превышает 300 Вт. Если детали на рисунке слишком мелкие, то кликните по этой картинке — она увеличится.
В подобных схемах используются МОП-транзисторы. Система управления создаётся на основе микроконтроллеров. Результатом будет сформированная чистая синусоида на выходе.
Рекомендации
Использование в бытовых условиях трёхфазных двигателей постоянного тока не вызывает никаких затруднений тогда, когда управление ими осуществляется посредством специальных драйверов, например:
- одного реверсируемого двигателя постоянного тока;
- двух двигателей постоянного тока;
- двигателя постоянного тока с регулятором скорости.
Вооружившись технологией и желанием собрать устройство своими руками можно смело браться за дело. При работе драйверов требуется учитывать конструктивные особенности и некоторые рекомендации по подключению:
- проверка уровня заряда аккумуляторов, напряжение должно быть не менее 12 В;
- не допускать высоких токовых значений на выходе моста, чтобы не сгорели транзисторы;
- если продолжительное включение драйвера приводит к перегреву корпуса транзистора, то понадобится установка радиатора решетчатого типа на сток транзистора;
- двигатель с источником питания по шине +12 В выполнять многожильным медным кабелем, рассчитанным на большой ток.
Заключение
Трёхфазные электродвигатели широко применяются на разнообразном оборудовании, их постоянно совершенствуют, благодаря развитию полупроводниковой техники. Предлагаются универсальные решения создания устройств, работающих в широком диапазоне рабочих параметров, обеспечивающих надежную и удобную эксплуатацию агрегатов.
При желании можно самим собрать драйвер, и с помощью него вращать трёхфазный двигатель. По стоимости покупка отдельных компонентов схем и выполнение сборки собственноручно обходится дешевле, чем приобретение готового устройства.
Модули управления двигателями — Igbt транзисторы,драйверы транзисторов, драйверы тиристоров
Модули управления двигателями
Модули предназначены для управления асинхронными двигателями, коллекторными и вентильными двигателями постоянного тока. В группу входит универсальный модуль интеллектуального инвертора предназначенный для работы с любым типом двигателя в составе с внешней схемой управления. Модули могут быть использованы для построения преобразователей частоты для цепей питания с пиковым напряжением до 1200 В и током нагрузки до 100 А.
| Тип | Описание | U,В | I,А | Корпус | Паспорт | |
| Интеллектуальные инверторы |
||||||
|
М32 |
Двух-, трехфазный инвертор с цепями управления и цепями защит. |
<100
|
<75
|
МККТ |
|
|
|
<200 |
<50 | |||||
|
<600 |
<25 | |||||
|
<100 |
<100 |
ДМ |
||||
|
<200 |
<100 | |||||
|
<600 |
<100 | |||||
|
<1200 |
<75 | |||||
|
М32М |
Малогабаритный двух-, трехфазный инвертор с цепями управления. |
<100
|
<10 |
ПП2 |
|
|
|
<200 |
||||||
|
<600 |
||||||
|
М32Д |
Инвертор с контролем тока фаз с выдачей гальванически развязанного сигнала пропорционального току с цепями управления и цепями защит. |
<100 | <100 |
ДМ |
|
|
|
<200 |
<100 | |||||
|
<600 |
<100 | |||||
|
<1200 |
<75 | |||||
| М31-SIP |
Трехфазный инвертор, являющийся аналогом IRAMS10UP60A. (Опытный образец). |
<600 | <10 |
— |
||
| М31И |
Трехфазный инвертор. В М31И сигналы управления гальванически развязаны от силовой цепи |
<1200 | <50 |
ДМ |
||
| М31А | Трехфазный инвертор | <1200 | <100 |
ДМ |
|
|
| М31Б | Двухфазный инвертор | <1200 | <100 |
ДМ |
||
| Модули управления двигателями |
||||||
|
МУАДМ
|
Модули управления асинхронным электродвигателем |
<1200 | <100 |
ДМ |
||
| МУВДМ |
Модули управления вентильным электродвигателем с ДПР |
<1200 | <100 |
ДМ |
||
| МУКДМ |
Модуль управления коллекторным электродвигателем |
<1200 | <100 |
ДМ |
||
| МДВ |
Модуль управления вентильным электродвигателем с ДПР |
<55 | <5 |
МД |
||
| МДК |
Модуль управления коллекторным электродвигателем |
<55 | <5 |
МД |
||
|
МОУД1 |
Модуль управления коллекторным электродвигателем
|
<100 |
<10 |
— |
|
|
|
МОУД3 |
Модуль управления вентильным электродвигателем с ДПР |
<100 |
<10 |
— |
|
|
| Драйвера управления двигателями |
||||||
| МКАД |
Драйвер управления асинхронным электродвигателем |
— | — |
МД |
||
| МКВД |
Драйвер управления вентильным электродвигателем с ДПР |
— | — |
МД |
||
| МККД |
Драйвер управления коллекторным электродвигателем |
— | — |
МД |
||
Так же рекомендуем просмотреть модули контроля напряжения ПЧ
Управление бесколлекторным двигателем — схемотехника
Основная задача блока управления бесколлекторным двигателем — переключать обмотки статора в зависимости от положения ротора.
В двигателе постоянного тока эту задачу выполняет коллектор — диск на роторе с контактными площадками, по которому скользят токопроводящие графитовые щетки и переключают обмотки.В асинхронном двигателе знать положение ротора не нужно, но для регулировки скорости нужно менять частоту переключения обмоток (или работать от сети со стандартной частотой 50Гц)
Я начинал изучение схемотехники драйвера бесколлекторного двигателя по апноте Atmel «AVR492: Управление бесколлекторным электродвигателем постоянного тока с помощью AT90PWM3» Она есть на русском языке. Немного пояснений: «Для управления БКЭПТ используется силовой каскад, состоящих из 3 полумостов. Схема силового каскада показана на рисунке 4.»
Здесь силовой каскад — это 6 транзисторов, схематично показанных ключами CmdSW, полумост — пара транзисторов, соединенных последовательно между «+» и «-» питания, например CmdSW1, CmdSW2. A, B, C — выводы обмоток двигателя, соединение обмоток между собой как у асинхронных двигателей. Эта схема позволяет току протекать между фазами A, B, C в любом направлении. Например если замкнуть ключ CmdSW1 и CmdSW4, то ток потечет от вывода A к выводу B, а если замкнуть CmdSW3 и CmdSW2 — от вывода В к выводу A. А если замкнуть CmdSW1 и CmdSW2 — получится короткое замыкание с выгоранием транзисторов, так что управлять транзисторами нужно осторожно. Кстати для управления коллекторым двигателем с реверсом нужно 2 полумоста, без реверса — 1 транзистор.
Для регулирования силы тока в фазе используют широтно-импульсную модуляцию (ШИМ). Например часть времени открывают ключи CmdSW1, CmdSW4 и ток начинает течь от «A» к «B», затем закрывают CmdSW1 и открывают CmdSW2 и за счет индуктивности обмоток ток продолжить течь по кольцу A-B-CmdSW4-«земля»-CmdSW2. Кстати в транзисторы встроены диоды, проводящие ток в обратном направлении. Так что если во второй фазе ШИМ разомкнуть все транзисторы, то в обмотке начнет расти напряжение и через эти диоды энергия из обмоток начнет возвращаться в сеть.
Эта схема из 6 транзисторов называется трехфазным инвертором и применяется для преобразования постоянного тока в трехфазный переменный для питания как бесколлекторных, так и асинхронных двигателей. Для бесколлекторных двигателей применяются низковольтные полевые транзисторы (MOSFET), для асинхронных двигателей — высоковольтные биполярные транзисторы с изолированным затвором (IGBT). С помощью этой схемы можно осуществлять и рекуперацию. Её используют все и лучше не сделать.
Как инвертор бывает оформлен в зависимости от мощности двигателя:
Для управления двигателями очень маленькой мощности используются специализированные микросхемы, в которой уже находятся 6 транзисторов и логика для управления ими. Это решение для двигателей дисководов и вентиляторов. Следующий шаг — микросхема, управляющая транзисторами и транзисторы отдельно. И для высоких мощностей микросхема или контроллер управляет микросхемами драйверов транзисторов, а драйвера уже управляют самими транзисторами. Зачем такие сложности? Мощные транзисторы имеют управляющий вход с большей емкостью, слабая электроника не в состоянии обеспечить токи до нескольких ампер для быстрого их открытия. А у полуоткрытого транзистора большое сопротивление, он в этот момент греется или даже сгорает 🙂 Поэтому используют микросхемы-драйверы, внутри которых кстати тоже транзисторы, только менее мощные. Получается такой каскад из транзисторов.
Вот первый пример реализации инвертора — авиамодельный, самый дешевый. Фото с двух сторон.
На одной стороне видно 6 транзисторов в корпусах SOIC. (3 N-канальных, 3 P-канальных), на другой стороне микроконтроллер ATMEGA8 и линейный стабилизатор для получения 5В питания. Ещё есть электролитический конденсатор и всякая мелочь — резисторы с конденсаторами. И всё. Дешево и сердито. Цена в рознице около 1000р. Микроконтроллер напрямую управляет затворами транзисторов. Греется такой контроллер довольно сильно, но так как он устанавливается на авиамодели, то хорошо обдувается. Разумеется есть более продвинутые модели, это просто пример упрощения и миниатюризации.
А вот фотография демо-платы от Atmel
Предполагается, что можно купить её и сразу начать программировать контроллер, пытаться крутить двигатель. Я решил не покупать, возможно зря. Во всяком случае к ней неплохо бы продавать сразу запасные транзисторы, я их сжег не один раз. И контроллер пару раз. Собственно 6 транзисторов справа, контроллер слева, драйвера транзисторов на другой стороне.
Схема моего драйвера с пояснениями
Я решил не делать простейший драйвер с тем, чтобы расширить возможности его применения, при необходимости несложно будет упростить. Схема разбита на 3 части. Она не такая наглядная, как в апноте Atmel, но постараюсь всё пояснить.
Первая часть — силовая
Силовые транзисторы VT1-VT6 управляются микросхемами-драйверами DA1-DA3. Транзисторы я выбрал IRLR3705 как одни из наиболее мощных в корпусе D-Pak на напряжение 55V с сопротивлением 8мОм. Я рассчитывал на напряжение работы 36В плюс запас. В принципе можно ставить транзисторы на радиаторы и использовать корпуса TO-220, но я решил не усложнять монтаж и паять транзисторы на плату. В таком случае для меньших мощностей можно ставить транзисторы в корпусе soic, а для больших — в D2-Pak. Драйвера взял самые мощные из полумостовых от фирмы International Rectifier — irf2186s с током управления до 4A. Получился большой запас, но самые простые драйвера ir2101 из апнота атмел (ток 130/270мА) с мощными транзисторами справлялись плохо, разница в нагреве транзисторов была ощутима. Полумостовой драйвер управляет двумя транзисторами — верхним и нижним, для управления верхним транзистором нужно высокое напряжение, которое получается по бустрепной схеме питания с помощью диода и конденсатора (например C6, DD7), эта схема наиболее проста и принцип её можно легко найти в интернете. Можно было взять одну микросхему full-brige для управления сразу шестью транзисторами, но у меня разводка с ней получалась хуже. Между затворами транзисторов и драйверами — резисторы с диодом. Они ограничивают ток затвора, причем ток зарядки почти в 2 раза больше. Тут следующая логика — чем больше ток, тем меньше греются транзисторы при переключении, но растут всплески напряжения. Поэтому номинал резисторов нужно уменьшать до какого-либо разумного предела. Причем транзистор открывается медленнее, чем закрывается, поэтому ток зарядки я сделал больше. Сигнальные выводы драйверов подтянуты к земле на всякий случай, чтоб не сработали когда нет сигналов управления. В целом здесь всё почти так же, как в апноте атмел. Датчики холла также подключил как в апноте, здесь ничего интересного. Питание, силовые Выводы транзисторов и выводы датчиков холла выведены на клеммник X1. Для защиты от короткого замыкания нужно контролировать ток. Для этого служат резисторы R19, R21 суммарным сопротивлением 0,005Ом (в апноте был резистор 0,1Ом), падение напряжение на них усиливается микросхемой LM358 и идет на компаратор и АЦП контроллера. Реализация у меня получилась не очень удачной, но в большинстве случаев защита срабатывает. Неплохо было бы ставить переменный резистор, чтобы пользователь мог задавать порого срабатывания защиты, но это как-нибудь потом ). Также в контроллер заведен сигнал V_IN_MEAS, пропорцональный входному напряжению. Сделано это, чтобы не давать работать драйверу при входном напряжении более 36В, но защиту я пока не включил.
Следующая часть схемы — питание логических элементов.
Из входного питания 24..36В нужно получить 12В для питания драйверов транзисторов и 5В для остальной логики
Для получения 12В я использовал линейный стабилизатор MC78M12. Лишнее напряжение он просто рассеивает в виде тепла, но так как драйверы транзисторов поребляют не очень много нагрев приемлемый.
Для 5В питания линейный стабилизатор уже применить не получилось, потому что 5В ещё задумывалось использовать для питания внешнего экрана индикации и нагрев оказался слишком большим. Поэтому применил понижающий преобразователь L5973AD. Он не очень дорогой, но в отличии от ещё более дешевых вариантов имеет защиту от короткого замыкания на выходе. Внешняя обвязка для него и разводка дорожек выполнена по соответствующей апноте.
Обе эти микросхемы имеют максимально допустимое напряжение 35В. Для гашения возможного излишнего напряжения предназначена конструкция из транзисторов VT7, VT8 и стабилитрона VD3.
- 6 выводов PSCOUT_XX используются для управления драйверами транзисторов.
- 3 вывода HALL_X используются для отслеживания датчиков холла двигателя.
- 3 вывода задействованы на микропереключатель SA1 — он служит для переключения интерфейсов драйвера (RS485 либо переменный резистор с кнопками), выбора числа пар полюсов подключенного двигателя (2 либо 4) и для проведения калибровки двигателя (определение положения датчиков холла)
- 3 вывода задействованы для управления микросхемой-драйвером RS485
- 6 выводов задействованы под вариант традиционного управления драйвером — с кнопками и переменным резистором. 4 кнопки служат для включения/выключения (Enable), реверса(F/R), тормоза(Brake) и выбора режима поддержания скорости(Mode). Еще один вывод Speed(analog) для переменного резистора задания скорости и на последний выход Hall_out подаются импульсы при срабатывании датчиков холла. Эти выводы и выводы интерфейса RS485 выведены на клеммник X3.
- 2 вывода задействованы для контроля сигнала токового шунта ERROR_ADC. Один для быстрого срабатывания защиты, другой для грубой оценки потребляемого тока.
- 1 вывод для контроля входного напряжения V_IN_MEAS
- 1 вывод для светодиода VD5, полезного для индикации различных событий.
Представленная схемотехника конечно не соответствует первоначальной идее о максимально дешевом драйвере, но относительно легко может быть упрощена. Можно убрать интерфейс RS485, поставить менее мощные транзисторы и драйверы управления ими.
РЕГУЛЯТОР МОЩНОСТИ ДЛЯ 3 ФАЗНОГО МОТОРА
Цифровой регулятор мощности для 3 фазного мотора переменного тока выполнен с использованием специальной микросхемы MC3PHAC от фирмы NXP Semiconductor. Она генерирует 6 ШИМ-сигналов для 3 фазного двигателя переменного тока. Блок легко совмещается с мощным 3 фазным IGBT/MOSFET ключевым приводом. Плата обеспечивает 6 ШИМ сигналов для IPM или IGBT инвертора, а также сигнал торможения. Схема работает в автономном режиме и не требует программирования и кодирования.
Схема регулятора

Органы управления
- PR1: Потенциометр для установки ускорения
- PR2: Потенциометр для регулировки скорости
- SW1: Переключатель DIPX4 для установки частот 60Hz/50Hz и установки выхода активный низкий / активный высокий
- SW2: Переключатель сброса
- SW3: Старт / стоп мотор
- SW4: изменить направление двигателя

Основные параметры
- Питание драйвера 7-15 В постоянного тока
- Потенциометр для управления скоростью двигателя
- Частота ШИМ по умолчанию 10.582 кГц (5.291 кГц – 164 кГц)
М/с MC3PHAC — это монолитный интеллектуальный контроллер, разработанный специально для удовлетворения потребности в недорогих 3-фазных системах управления электродвигателем переменного тока с регулировкой скорости вращения. Устройство адаптируется и настраивается в зависимости от его параметров. Оно содержит все активные функции, необходимые для реализации части управления с открытым контуром. Всё это делает MC3PHAC идеально подходящей для устройств, требующих поддержки управления двигателем переменного тока.

В состав MC3PHAC входят защитные функции, состоящие из контроля напряжения шины постоянного тока и входа неисправности системы, которые немедленно отключат модуль ШИМ при обнаружении неисправности системы.
Все выходные сигналы TTL уровня. Вход для блока питания 5-15 В постоянного тока, постоянное напряжение на шине должно быть в пределах 1.75 — 4,75 вольта, DIP-переключатель предусмотрен на плате для установки под двигатели с частотой 60 или 50 Гц, перемычки помогают установить полярность выходного ШИМ-сигнала, то есть активный низкий или активный высокий уровень, что позволяет использовать эту плату в любом модуле, так как выход можно установить активный низкий или высокий. Потенциометр PR2 помогает регулировать скорость двигателя. Для изменения базовой частоты, времени отключения ШИМ, других возможных параметров — изучайте даташит. Файлы платы — в архиве

Управление скоростью. Синхронная частота электродвигателя может быть задана в режиме реального времени для любого значения от 1 Гц до 128 Гц регулировкой потенциометра PR2. Коэффициент масштабирования составляет 25,6 Гц на вольт. Обработка 24-битным цифровым фильтром для того чтобы увеличить стабильность скорости.
Управление ускорением. Ускорение двигателя может быть задано в режиме реального времени в диапазоне от 0,5 Гц/сек до 128 Гц/сек, путем регулировки потенциометра PR1. Коэффициент масштабирования составляет 25,6 Гц/секунду на вольт.
Защита. При возникновении неисправности MC3PHAC немедленно отключает ШИМ и ожидает, пока условие неисправности не будет устранено перед запуском таймера для повторного включения. В автономном режиме этот интервал времени ожидания задается на этапе инициализации путем подачи напряжения на вывод MUX_IN, в то время как вывод RETRY_TxD управляется на низком уровне. Таким образом, время повтора может быть указано от 1 до 60 секунд с коэффициентом масштабирования 12 секунд на вольт.
Контроль внешних неисправностей. Вывод FAULTIN принимает цифровой сигнал, указывающий на неисправность, обнаруженную с помощью внешних цепей мониторинга. Высокий уровень на этом входе приводит к немедленному отключению ШИМ. Как только этот вход возвращается к низкому уровню логики, таймер повтора сбоя начинает работать, и ШИМ повторно включается после достижения запрограммированного значения тайм-аута. Входной контакт 9 разъема CN3 FLTIN должен быть с высоким потенциалом.
Мониторинг целостности напряжения (входной сигнал pin 10 в cn3) в DC_BUS отслеживается на частоте 5.3 кГц (4.0 кГц, если частота ШИМ имеет значение до 15,9 кГц). В автономном режиме пороги фиксируются на 4.47 вольт (128% от номинальной), и 1,75 вольт (50% от номинальной), где номинальное значение определяется в 3,5 вольт. Как только уровень сигнала DC_BUS возвращается к значению в пределах допустимого — таймер повтора сбоя начинает работать, и ШИМ снова включается после достижения запрограммированного значения тайм-аута.
Регенерация. Процесс экономии, с помощью которого сохраненная механическая энергия в двигателе и нагрузке переносятся обратно в привод электроники, происходит это как правило, в результате принудительного замедления. В особых случаях, когда этот процесс происходит часто (например, системы управления двигателями лифтов), он включает специальные функции, чтобы позволить этой энергии перейти обратно в сеть переменного тока. Однако для большинства недорогих приводов переменного тока эта энергия сохраняется в конденсаторе шины постоянного тока за счет увеличения ее напряжения. Если этот процесс не установлен, напряжение шины постоянного тока может подниматься до опасного уровня, что может привести к порче конденсатора шины или транзисторов в инверторе питания. MC3PHAC позволяет автоматизировать и стабилизировать этот процесс.
Резистивное торможение. DC_BUS пин-код отслеживается на 5.3 кГц (4.0 кГц, если частота ШИМ имеет значение до 15,9 кГц), и когда напряжение достигает определенного порога, RBRAKE контакт примет высокий потенциал. Этот сигнал может использоваться для управления резистивным тормозом, размещенным через конденсатор шины постоянного тока, таким образом, механическая энергия от двигателя будет рассеиваться в виде тепла в резисторе. В автономном режиме порог DC_BUS, необходимый для подтверждения сигнала RBRAKE, зафиксирован на уровне 3,85 вольта (110 % номинала), где номинал определяется как 3,5 вольта.

Выбор частоты ШИМ. У MC3PHAC имеется четырех дискретных частоты ШИМ, которые могут быть динамически изменены во время вращения электродвигателя. Этот резистор может быть потенциометром или фиксированным резистором в диапазоне, показанном в таблице. Частота ШИМ определяется подачей напряжения на контакт MUX_IN в то время как контакт ШИМ FREQ_RxD управляется низким потенциалом.
Форум
Обсудить статью РЕГУЛЯТОР МОЩНОСТИ ДЛЯ 3 ФАЗНОГО МОТОРА
Запускаем трехфазный двигатель от HDD (контроллер бесколлекторного двигателя)
То о чем много спрашивают и никто толком не говорит. Разобрал жесткий диск, нарыл там двигатель интересной конструкции. Разобрать не получилось, да и особо не старался. Оказалось что есть такие двигатели, у которых три обмотки и которых необходимо как-то по особому питать чтобы они крутится начали.
В чем прелесть спросите?
Ответ: столько оборотов в минуту из известных мне двигателей дает только движок от формулы 1 🙂
Не зря трехфазные бесколлекторные двигатели нашли широкое применение в авиамоделизме.
Стандартный бесколлекторный двигатель выглядит примерно так:
Двигатели из CD-ROM/DVD-ROM приводов выглядят так:
В интернете есть даже статьи по переделке бесколлекторного двигателя от CD-ROM для дальнейшего его применения в авиамоделизме.
В переделку обычно входят:
— перемотка другим проводом(тоньше или толще диаметром),
— изменение схемы намотки (звезда или треугольник),
— замена обычных магнитов на ниодимовые.
После чего трехфазный двигатель приобретает дополнительные обороты и мощность.
Я в эксперименте использовал обычный бесколлекторный двигатель от HDD привода, виглядит он так:
Предварительно конечно лучше закрепить его на чем-то, я использовал корпус от того самого HDD привода.
Сам двигатель, который я использовал имеет четыре вывода, что говорит о том, что схема намотки у него в виде звезды с отводом от центра, то есть что-то примерно такое:
Схема управления простая, и состоит из не большого числа элементов. В виде управляющего устройства использован микроконтроллер ATmega8. Схема устройства показана на рисунке: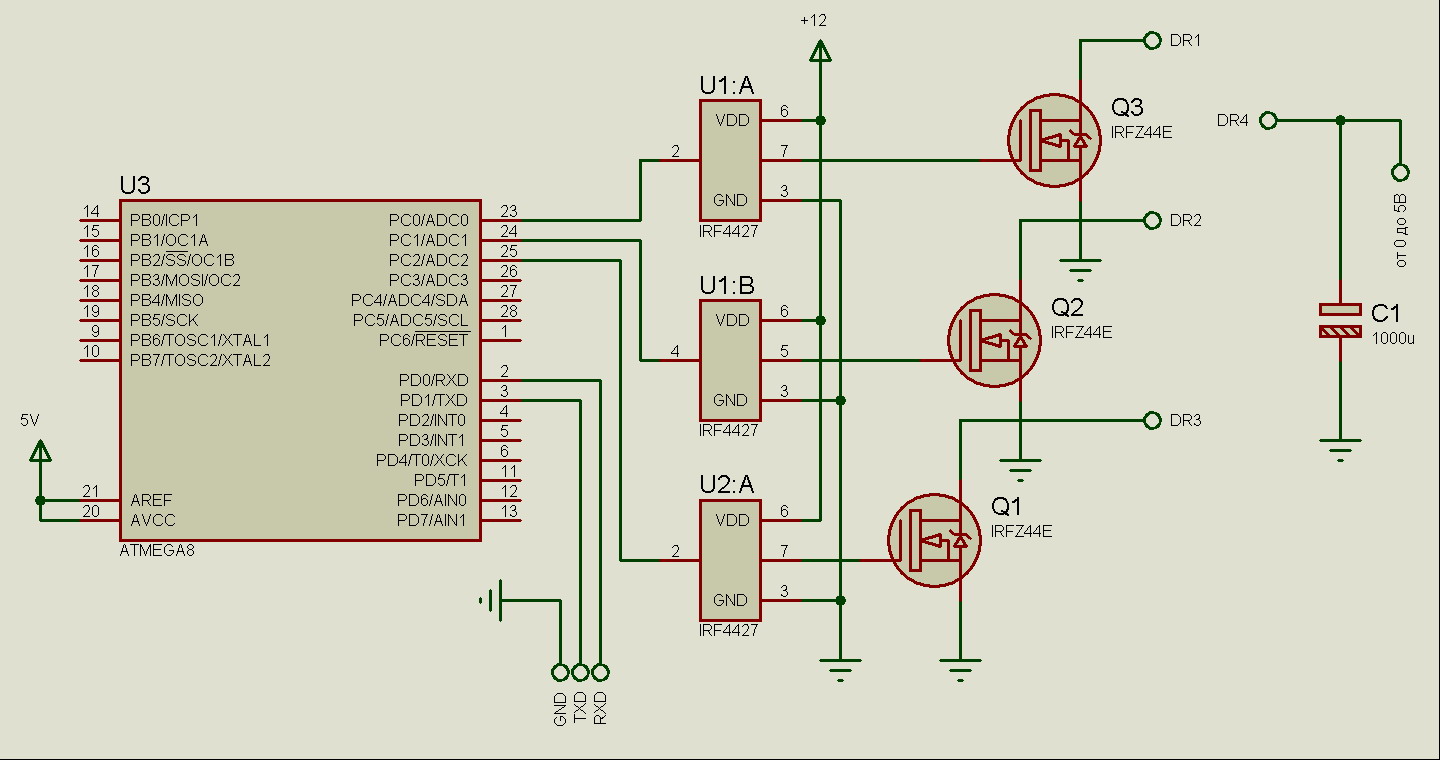
В схеме использованы драйверы полевых транзисторов IR4427 и сами полевые транзисторы IRFZ44.
Управляющая программа была написана не мною, автор Дмитрий(Maktep) за что ему отдельное спасибо.Как исключение программа написана на Си для CV-AVR.
ПРограмма транслирована под компилятор WIN GCC.
Частота кварца 8МГц, для устройств с связью по UART рекомендую использовать внешний кварц, так как при тактировании от внутреннего генератора могут появляться ошибки в виду его нестабильной работы при изменении температуры окружающей среды.
#include <avr/io.h>
#include <avr/interrupt.h>
#include <stdio.h>
void USART_Init( unsigned int ubrr);
void USART_Transmit( unsigned char data );
char status,data;
char state;
unsigned int lvl=65530/4;
// USART Receiver interrupt service routine
ISR(USART_RXC_vect)
{
status=UCSRA;
data=UDR;
if (lvl<3000)
{ if (data=='+')
lvl--;
else
if (data=='-')
lvl++;}
else
{if (data=='+')
lvl-=lvl/500;
else
if(data=='-')
//if (lvl,/)
lvl+=lvl/500;
}
}
// Timer1 output compare A interrupt service routine
ISR(TIMER1_COMPA_vect)
{
switch (state)
{
case 0: PORTC=1; break;
case 1: PORTC=3; break;
case 2: PORTC=2; break;
case 3: PORTC=6; break;
case 4: PORTC=4; break;
case 5: PORTC=5; break;
}
if (state<5)
state++;
else
state=0;
}
void USART_Init( unsigned int ubrr)
{
/* Set baud rate */
UBRRH = (unsigned char)(ubrr>>8);
UBRRL = (unsigned char)ubrr;
/* Enable receiver and transmitter */
UCSRB=(1<<RXEN)|(1<<TXEN);
UCSRB |= (1<< RXCIE);
/* Set frame format: 8data, 2stop bit */
UCSRC=0x86;//
UCSRC = (1<<URSEL)|(1<<USBS)|(3<<UCSZ0);
}
void USART_Transmit( unsigned char data ) //
{
while ( !(UCSRA & (1<<UDRE)) ); //
UDR = data; //
}
int main(void)
{
PORTC=0x00;
DDRC=0x07;
// Timer/Counter 1 initialization
// Clock source: System Clock
// Clock value: 8000,000 kHz
// Mode: CTC top=OCR1A
// OC1A output: Discon.
// OC1B output: Discon.
// Noise Canceler: Off
// Input Capture on Falling Edge
// Timer1 Overflow Interrupt: Off
// Input Capture Interrupt: Off
// Compare A Match Interrupt: On
// Compare B Match Interrupt: Off
TCCR1A=0x00;
TCCR1B=0x09;
TCNT1H=0x00;
TCNT1L=0x00;
ICR1H=0x00;
ICR1L=0x00;
OCR1AH=0xFF;
OCR1AL=0xFF;
OCR1BH=0x00;
OCR1BL=0x00;
// Timer(s)/Counter(s) Interrupt(s) initialization
TIMSK=0x10;
USART_Init (8);//28800 4MHz
USART_Transmit('O');
USART_Transmit('k');
USART_Transmit('!');
USART_Transmit(0x0d);
USART_Transmit(0x0a);
// Global enable interrupts
sei();
while (1)
{
OCR1A=lvl;
};
}
Скачать проект Win AVR
Алгоритм работы построен так, что при нажатии на клавиатуре кнопки «+» передается по UART в микроконтроллер, который увеличивает скорость коммутации обмоток. И при нажатии на кнопку «—» все выполняется наоборот, то есть обороты двигателя уменьшаются. Для работы устройства дополнительно понадобится UART-RS232 конвертер.
Эксперимент показал что при данной программе и данной схеме включения можно разогнать двигатель до приличных оборотов, точное число не известно, думаю в пределах 30 000 оборотов в минуту. Но к сожалению сила двигателя недостаточная для раскручивания пластикового пропеллера, верней с пропеллером двигатель набирает обороты, но при нагрузке происходит сбой и остановка двигателя.
Для избежания данного недостатка применяются датчики Холла, устройства контролирующие положение ротора бесколлекторного двигателя. Это сделано для того, чтобы импульс на обмотку двигателя подавать именно в тот момент когда ротор проходит конец обмотки, то есть для смещения момента силы ближе к концу прохождения сектора обмотки. Это даст прирост мощности двигателя и он не будет глохнуть при нагрузках.
Видео работы устройства:
В видеоролике показано как я закрепил два кусочка пластика вырезанных из телефонной карточки в виде лепестка и прикрученных к ротору двигателя.
В планах попробовать применить ШИМ для коммутации обмоток. Рассчитываю на повышение мощности, улучшение характеристик разгона двигателя (в частности скорости разгона), повышение КПД.
Частотные преобразователи для асинхронных двигателей
Созданный в конце XIX столетия, трёхфазный асинхронный двигатель стал незаменимой составляющей современного промышленного производства.
Для плавного пуска и остановки такого оборудования требуется специальное устройство – преобразователь частоты. Особо актуально наличие преобразователя для крупных двигателей с большой мощностью. С помощью этого дополнительного устройства можно регулировать пусковые токи, то есть, контролировать и ограничивать их величину.
Принцип работы частотного преобразователя
 Если регулировать пусковой ток исключительно механическим способом, не удастся избежать энергетических потерь и уменьшения срока службы оборудования. Показатели этого тока в пять-семь раз превышают номинальное напряжение, что недопустимо для нормальной работы оборудования.
Если регулировать пусковой ток исключительно механическим способом, не удастся избежать энергетических потерь и уменьшения срока службы оборудования. Показатели этого тока в пять-семь раз превышают номинальное напряжение, что недопустимо для нормальной работы оборудования.
Принцип работы современного преобразователя частоты подразумевает использование электронного управления. Они не только обеспечивают мягкий пуск, но и плавно регулируют работу привода, придерживаясь соотношения между напряжением и частотой строго по заданной формуле.
Основное преимущество устройства – экономия в потреблении электроэнергии, составляющая в среднем 50%. А также возможность регулировки с учётом потребностей конкретного производства.
Устройство функционирует по принципу двойного преобразования напряжения.
- Напряжение сети выпрямляется и фильтруется системой конденсаторов.
- Затем в работу вступает электронное управление – образуется ток с указанной (запрограммированной) частотой.
На что обратить внимание при выборе?
 Производители делают упор на стоимость преобразователя. Поэтому многие опции доступны только у дорогих моделей. При выборе устройства следует определиться с основными требованиями для конкретного использования.
Производители делают упор на стоимость преобразователя. Поэтому многие опции доступны только у дорогих моделей. При выборе устройства следует определиться с основными требованиями для конкретного использования.
- Управление может быть векторным или скалярным. Первое даёт возможность точной регулировки. Второе лишь поддерживает одно, заданное соотношение между частотой и напряжением на выходе и подходит только для простых приборов, вроде вентилятора.
- Чем выше указанная мощность, тем универсальнее будет устройство — обеспечится взаимозаменяемость и упростится обслуживание оборудования.
- Диапазон напряжения сети должен быть максимально широким, что обезопасит при перепадах его норм. Понижение не так опасно для устройства, как повышение. При последнем — вполне могут взорваться сетевые конденсаторы.
- Частота должна полностью соответствовать потребностям производства. Нижний предел указывает на диапазон регулирования скорости привода. Если нужен более широкий, потребуется векторное управление. На практике применяются частоты от 10 до 60 Гц, реже до 100Гц.
- Управление осуществляется через различные входы и выходы. Чем их больше, тем лучше. Но большее количество разъёмов существенно увеличивает стоимость устройства и усложняет его настройку. Дискретные входы (выходы) используются для ввода команд управления и выхода сообщений о событиях (например, о перегреве), цифровые – для ввода сигналов цифровых датчиков (высокочастотных), аналоговые – для ввода сигналов обратной связи.
- Шина управления подключаемого оборудования должна совпадать с возможностями схемы частотного преобразователя асинхронного двигателя по количеству входов и выходов. Лучше иметь небольшой запас для модернизации.
- Перегрузочные способности. Оптимален выбор устройства с мощностью на 15% больше мощности используемого двигателя. В любом случае нужно прочесть документацию. Производители указывают все основные параметры двигателя. Если важны пиковые нагрузки, следует выбрать преобразователь с показателем пикового тока на 10% больше указанного.
Сборка преобразователя частоты для асинхронного двигателя своими руками
 Собрать инвертор или преобразователь можно самостоятельно. В настоящее время в сети находится множество инструкций и схем такой сборки.
Собрать инвертор или преобразователь можно самостоятельно. В настоящее время в сети находится множество инструкций и схем такой сборки.
Основная задача – получить «народную» модель. Дешёвую, надёжную и рассчитанную на бытовое применение. Для работы оборудования в промышленных масштабах, конечно, лучше отдать предпочтение устройствам, реализуемым магазинами.
Порядок действий по сборке схемы частотного преобразователя для электродвигателя
- Обмотки двигателя соединяются треугольником.
- Для сборки частотного преобразователя для однофазного двигателя нужны: IR2135(IR2133) – драйвер трёхфазного моста, AT90SPWM3B – микроконтроллёр (используется как генератор PWM), программатор (например, AVReAl), шесть штук транзисторов IRG4BC30W, ЖКИ индикатор, шесть кнопок.
- Преобразователь состоит из двух плат. К первой крепится блок питания, драйвер. Также здесь размещаются транзисторы и силовые клеммы.
- На второй устанавливается микроконтроллёр и индикатор. Между собой платы объединяются гибким шлейфом.
- Импульсный блок питания своими руками собирается по стандартной схеме.
- Для управления двигателем не требуется внешнее управление током. Но можно установить микросхему дополнительно (IL300), создав линейную развязку.
- Диодный мост вместе с транзисторами крепятся на общий радиатор.
- Оптроны ОС2-4 используются для дублирования кнопок управления. ОС-1 предназначен для пользовательских функций (сигнализации и т.п.)
- Трансформатор устанавливать на однофазный частотный преобразователь для электродвигателя не обязательно. Допустимо воспользоваться токовым шунтом, представляющим собой четыре витка манганинового провода с сечением 0,5 миллиметров на оправе 3 миллиметра. Усилитель DA-1 можно подключить к этому же шунту.
- Двигателю на 400Вт не потребуется термодатчик. Для измерения напряжения сети может использоваться DA-1-2 (усилитель).
- Кнопки изолируются пластмассовыми толкателями, для управления используется опторазвяка.
Регулировка вращения ротора двигателя вмещается в диапазон частоты 1:40. Для малых частот необходимо фиксированное напряжение (IR компенсация).
Подключение частотного преобразователя к электродвигателю
 Для однофазной проводки на 220В (использования в домашних условиях) подключение осуществляется по схеме «треугольник». Выходной ток не должен превышать 50% от номинального!
Для однофазной проводки на 220В (использования в домашних условиях) подключение осуществляется по схеме «треугольник». Выходной ток не должен превышать 50% от номинального!
Для трёхфазной проводки на 380В (промышленного использования) подключение двигателя к частотному преобразователю осуществляется по схеме «звезда».
Преобразователь (или инвертор) имеет соответствующие клеммы, помеченные буквами.
- R, S, T– сюда подключаются провода сети, очерёдность не имеет значения;
- U , V , W – для включения асинхронного двигателя (если двигатель вращается в обратную сторону, нужно поменять местами любой из двух проводов на этих клеммах).
- Отдельно предусмотрена клемма для заземления.
Рекомендации по обслуживанию электрооборудования
Для продления срока эксплуатации преобразователя необходимо соблюдать следующие правила:
- Регулярно очищать внутренности устройства от пыли (лучше выдувать её небольшим компрессором, так как пылесос с загрязнением не всегда справится – пыль уплотняется).
- Своевременно заменять узлы. Электролитические конденсаторы рассчитаны на пять лет, предохранители на десять лет эксплуатации. А вентиляторы охлаждения на два-три года использования. Внутренние шлейфы следует заменять раз в шесть лет.
- Контролировать внутреннюю температуру и напряжение на шине постоянного тока. Повышение температур приводит к засыханию термопроводящей пасты и разрушению конденсаторов. На силовых компонентах привода её следует менять ни реже одного раза в три года.
- Придерживаться условий эксплуатации. Температура окружающей среды не должна превышать +40 градусов. Недопустима высокая влажность и запылённость воздуха.
Управление асинхронным мотором (например, как подключить трёхфазный электродвигатель в сеть 220в) – довольно сложный процесс. Преобразователи, изготовленные кустарно, дешевле промышленных аналогов и вполне подходят для использования в бытовых целях. Однако для применения на производстве предпочтительнее установить инверторы, собранные в заводских условиях. Обслуживание таких дорогих моделей под силу только хорошо обученному техническому персоналу.