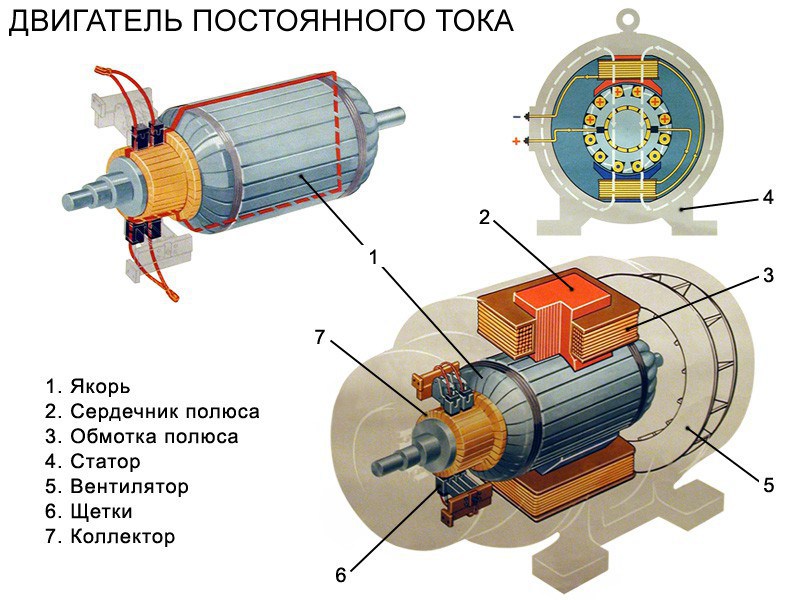
Двигатель постоянного тока: описание принципа работы, типы
В данной статье мы подробно рассмотрим двигатели постоянного тока. Детально разберем типы и принцип работы данных двигателей. Расскажем как происходит переключение и контролирование двигателя, контролирования скорости и регулировка скорости импульса, а так же опишем как изменить направление вращения двигателя постоянного тока разными методами.
Описание и принцип работы
Электрические двигатели постоянного тока — это непрерывные приводы, которые преобразуют электрическую энергию в механическую. Двигатель постоянного тока достигает этого, создавая непрерывное угловое вращение, которое можно использовать для вращения насосов, вентиляторов, компрессоров, колес и т.д. Купить двигатель постоянного тока вы можете на Алиэкспресс:

Наряду с обычными роторными двигателями постоянного тока имеются также линейные двигатели, способные производить непрерывное движение вкладыша. Существуют в основном три типа обычных электрических двигателей: двигатели переменного тока, двигатели постоянного тока и шаговые двигатели.
Двигатели переменного тока, как правило, используются в однофазных или многофазных промышленных мощных установках, в которых постоянный крутящий момент и скорость требуются для управления большими нагрузками, такими как вентиляторы или насосы.

В этом уроке по электродвигателям мы рассмотрим только простые двигатели постоянного тока и шаговые двигатели, которые используются во многих различных типах электронных схем, систем позиционного управления, микропроцессоров, PIC и роботизированных схем.
Типы двигателей постоянного тока
Двигатель постоянного тока, является наиболее часто используемым приводом для создания непрерывного движения, скорость вращения которого легко регулируется, что делает их идеальными для использования в устройствах, таких как регулирование скорости, управление сервоприводом и / или требуется позиционирование. Двигатель постоянного тока состоит из двух частей: «Статор», который является неподвижной частью, и «Ротор», который является вращающейся частью. В результате доступно три типа двигателей постоянного тока.
- Коллекторный двигатель — этот тип двигателя создает магнитное поле в намотанном роторе (вращающаяся деталь), пропуская электрический ток через узел коммутатора и угольной щетки, отсюда и термин «щеточный». Магнитное поле статоров (неподвижная часть) создается с помощью обмотки статора или постоянных магнитов. Обычно моторы с щеткой постоянного тока дешевые, маленькие и легко управляемые.
- Бесколлекторный двигатель — этот тип двигателя создает магнитное поле в роторе, используя постоянные магниты, прикрепленные к нему, и коммутация достигается с помощью электроники. Они, как правило, меньше, но дороже, чем обычные двигатели постоянного тока щеточного типа, потому что они используют переключатели «эффекта Холла» в статоре для получения требуемой последовательности вращения поля статора, но они имеют лучшие характеристики крутящего момента / скорости, более эффективны и имеют более длительный срок эксплуатации. чем эквивалентные коллекторные типы.
- Серводвигатель — этот тип двигателя в основном представляет собой коллекторный двигатель постоянного тока с некоторой формой управления позиционной обратной связью, подключенной к валу ротора. Они подключены к контроллеру типа ШИМ и управляются им, и в основном используются в системах позиционного управления и радиоуправляемых моделях.
Обычные двигатели постоянного тока имеют почти линейные характеристики, скорость вращения которых определяется приложенным напряжением постоянного тока, а их выходной крутящий момент определяется током, протекающим через обмотки двигателя. Скорость вращения любого двигателя постоянного тока может варьироваться от нескольких оборотов в минуту (об / мин) до многих тысяч оборотов в минуту, что делает их пригодными для применения в электронике, автомобилестроении или робототехнике. При подключении их к коробкам передач или зубчатым передачам их выходная скорость может быть уменьшена, в то же время увеличивая крутящий момент двигателя на высокой скорости.
Коллекторный двигатель постоянного тока
Стандартный коллекторный двигатель постоянного тока состоит в основном из двух частей: неподвижного корпуса двигателя, называемого статором, и внутренней части, которая вращается, создавая движение, называемое ротором или «арматурой» для машин постоянного тока.
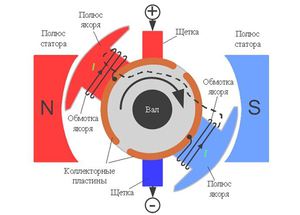
Обмотка статора двигателя представляет собой электромагнитную цепь, которая состоит из электрических катушек, соединенных вместе в круговую конфигурацию для создания необходимого северного полюса, затем южного полюса, затем северного полюса и т.д., типа стационарной системы магнитного поля для вращения, в отличие от машин переменного тока, чье поле статора постоянно вращается с приложенной частотой. Ток, который течет в этих полевых катушках, известен как ток поля двигателя.
Эти электромагнитные катушки, которые формируют поле статора, могут быть электрически соединены последовательно, параллельно или вместе с ротором двигателя. Последовательно намотанный двигатель постоянного тока имеет обмотки статора, соединенные последовательно с ротором. Аналогично, двигатель постоянного тока с шунтирующим витком имеет свои обмотки возбуждения статора, соединенные параллельно с ротором, как показано ниже.

Ротор постоянного тока состоит из токонесущих проводников, соединенных вместе на одном конце с электрически изолированными медными сегментами, называемыми коммутатором. Коммутатор позволяет осуществлять электрическое подключение через угольные щетки (отсюда и название «щеточный» двигатель) к внешнему источнику питания при вращении ротора.
Установленное ротором магнитное поле пытается выровнять себя с полем статора, заставляя ротор вращаться вокруг своей оси, но не может выровняться из-за задержек коммутации. Скорость вращения двигателя зависит от силы магнитного поля роторов, и чем больше напряжение подается на двигатель, тем быстрее вращается ротор. Изменяя это приложенное постоянное напряжение, можно также изменять частоту вращения двигателя.

Двигатель постоянного тока с щеточным постоянным магнитом (PMDC), как правило, намного меньше и дешевле, чем его эквивалентные родственники двигателя постоянного тока с обмоткой статора, поскольку они не имеют обмотки возбуждения. В двигателях с постоянными магнитами постоянного тока (PMDC) эти полевые катушки заменяются сильными магнитами типа редкоземельных элементов (например, самарий-коболт или неодим-железо-бор), которые имеют очень сильные магнитные энергетические поля.
Использование постоянных магнитов дает двигателю постоянного тока намного лучшую линейную характеристику скорости / крутящего момента, чем эквивалентные намотанные двигатели из-за постоянного и иногда очень сильного магнитного поля, что делает их более подходящими для использования в моделях, робототехнике и сервоприводах.
Хотя щеточные электродвигатели постоянного тока очень эффективны и дешевы, проблемы, связанные с щеточным электродвигателем постоянного тока, заключаются в том, что искрение возникает в условиях большой нагрузки между двумя поверхностями коммутатора и угольных щеток, что приводит к самогенерированию тепла, короткому сроку службы и электрическому шуму из-за искрения, что может повредить любое полупроводниковое коммутационное устройство, такое как МОП-транзистор или транзистор. Чтобы преодолеть эти недостатки, были разработаны бесщеточные или бесколлекторные двигатели постоянного тока.
Бесколлекторный двигатель постоянного тока
Бесщеточный (бесколлекторный) двигатель постоянного тока (BDCM) очень похож на двигатель постоянного тока с постоянными магнитами, но не имеет щеток для замены или износа из-за искрения коммутатора. Поэтому в роторе выделяется мало тепла, что увеличивает срок службы двигателей. Конструкция бесщеточного двигателя устраняет необходимость в щетках благодаря более сложной схеме привода, в которой магнитное поле ротора является постоянным магнитом, который всегда синхронизирован с полем статора, что позволяет более точно контролировать скорость и крутящий момент.
Тогда конструкция бесщеточного двигателя постоянного тока очень похожа на двигатель переменного тока, что делает его истинным синхронным двигателем, но одним недостатком является то, что он дороже, чем аналогичная конструкция «щеточного» двигателя.
Управление бесщеточными двигателями постоянного тока очень отличается от обычного щеточного двигателя постоянного тока тем, что этот тип двигателя включает в себя некоторые средства для определения углового положения роторов (или магнитных полюсов), необходимые для получения сигналов обратной связи, необходимых для управления переключением полупроводников. Самым распространенным датчиком положения / полюса является «Датчик Холла», но некоторые двигатели также используют оптические датчики.
При использовании датчиков с эффектом Холла полярность электромагнитов переключается с помощью схемы управления двигателем. Тогда двигатель можно легко синхронизировать с цифровым тактовым сигналом, обеспечивая точное управление скоростью. Бесщеточные двигатели постоянного тока могут быть сконструированы так, чтобы иметь внешний ротор с постоянными магнитами и внутренний статор электромагнита или внутренний ротор с постоянными магнитами и внешний статор электромагнита.
Преимущества бесщеточного двигателя постоянного тока по сравнению с его «щеточным» кузеном заключаются в более высокой эффективности, высокой надежности, низком электрическом шуме, хорошем контроле скорости и, что более важно, отсутствии износа щеток или коммутатора, что обеспечивает значительно более высокую скорость. Однако их недостатком является то, что они более дороги и сложнее в управлении.
Серводвигатель постоянного тока
Серводвигатели постоянного тока используются в системах с замкнутым контуром, в которых положение выходного вала двигателя возвращается обратно в цепь управления двигателем. Типичные позиционные устройства «обратной связи» включают в себя резольверы, энкодеры и потенциометры, используемые в моделях радиоуправления, таких как самолеты, лодки и т.д.
Серводвигатель, как правило, включает в себя встроенную коробку передач для снижения скорости и способен напрямую выдавать высокие крутящие моменты. Выходной вал серводвигателя не вращается свободно, как валы двигателей постоянного тока из-за присоединения редуктора и устройств обратной связи.
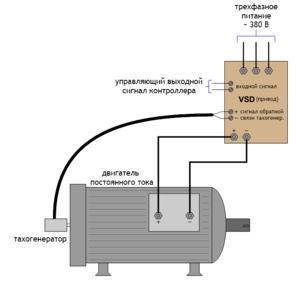
Блок-схема серводвигателя постоянного тока

Серводвигатель состоит из двигателя постоянного тока, редуктора, устройства позиционной обратной связи и некоторой формы коррекции ошибок. Скорость или положение контролируется по отношению к позиционному сигналу входного сигнала или опорного приложенному к устройству.

Усилитель обнаружения ошибок просматривает этот входной сигнал и сравнивает его с сигналом обратной связи с выходного вала двигателя и определяет, находится ли выходной вал двигателя в состоянии ошибки, и, если это так, контроллер вносит соответствующие исправления, либо ускоряя двигатель, либо замедляя его вниз. Эта реакция на устройство позиционной обратной связи означает, что серводвигатель работает в «замкнутой системе».
Наряду с крупными промышленными применениями серводвигатели также используются в небольших моделях с дистанционным управлением и робототехнике, причем большинство серводвигателей способны вращаться примерно на 180 градусов в обоих направлениях, что делает их идеальными для точного углового позиционирования. Тем не менее, эти сервоприводы типа RC не могут непрерывно вращаться на высокой скорости, как обычные двигатели постоянного тока, если специально не модифицированы.
Серводвигатель состоит из нескольких устройств в одном корпусе, двигателя, коробки передач, устройства обратной связи и коррекции ошибок для контроля положения, направления или скорости. Они широко используются в робототехнике и небольших моделях, так как ими легко управлять, используя всего три провода: питание , заземление и управление сигналами.
Переключение и контроль двигателя постоянного тока
Небольшие двигатели постоянного тока могут быть включены «Вкл» или выключены «Выкл» с помощью переключателей, реле, транзисторов или МОП-транзисторов, причем простейшей формой управления двигателем является «линейное» управление. Схема этого типа использует биполярный транзистор в качестве переключателя (транзистор Дарлингтона также может использоваться, если требуется более высокий номинальный ток) для управления двигателем от одного источника питания.
Изменяя величину тока базы, протекающего в транзистор, можно управлять скоростью двигателя, например, если транзистор включен наполовину, тогда только половина напряжения питания поступает на двигатель. Если транзистор включен полностью (насыщен), то все напряжение питания поступает на двигатель и вращается быстрее. Затем для этого линейного типа управления мощность постоянно подается на двигатель, как показано ниже.
Контроль скорости двигателя

Простая схема переключения, приведенная выше, показывает схему для однонаправленной (только в одном направлении) цепи управления скоростью двигателя. Поскольку скорость вращения двигателя постоянного тока пропорциональна напряжению на его клеммах, мы можем регулировать это напряжение на клеммах с помощью транзистора.
Два транзистора соединены в виде пары Дарлингтона для управления током основного ротора двигателя. 5 кОм потенциометр используется для регулирования количества базового привода на первый пилот — транзистора TR 1 , который, в свою очередь, контролирует главный коммутационный транзистор TR 2 , позволяя изменять напряжение постоянного тока двигателя от нуля до Vcc, в этом примере от 9 до 12 вольт.
Опциональные диоды маховика подключены к переключающему транзистору TR 2 и клеммам двигателя для защиты от любой обратной ЭДС, создаваемой двигателем при его вращении. Регулируемый потенциометр может быть заменен непрерывным логическим «1» или логическим «0» сигналом, подаваемым непосредственно на вход цепи, чтобы переключить двигатель «полностью включено» (насыщение) или «полностью выключено» (отключение) соответственно из порта микроконтроллера или ПОС.
Наряду с этим базовым контролем скорости, та же схема также может использоваться для управления скоростью вращения двигателей. Путем многократного переключения тока двигателя «ВКЛ» и «ВЫКЛ» на достаточно высокой частоте, скорость двигателя можно варьировать от состояния покоя (0 об / мин) до полной скорости (100%), изменяя отношение бестокового пространства к его запасу. Это достигается путем изменения соотношения времени включения (t ON ) и времени выключения (t OFF ), и это может быть достигнуто с помощью процесса, известного как широтно-импульсная модуляция (ШИМ).
Регулировка скорости импульса
Ранее мы говорили, что скорость вращения двигателя постоянного тока прямо пропорциональна среднему значению напряжения на его клеммах, и чем выше это значение, вплоть до максимально допустимого напряжения двигателя, тем быстрее будет вращаться двигатель. Другими словами, больше напряжения, больше скорости. Изменяя соотношение между временем «ВКЛ» (t ВКЛ ) и временем «ВЫКЛ» (t ВЫКЛ ), которое называется «Коэффициент заполнения», или «Рабочий цикл», среднее значение напряжения двигателя и, следовательно, его скорость вращения может варьироваться. Для простых униполярных приводов коэффициент заполнения β задается как:

и среднее выходное напряжение постоянного тока, подаваемое на двигатель, определяется как: Vmean = β x Vsupply. Затем, изменяя ширину импульса а, можно управлять напряжением двигателя и, следовательно, мощностью, подаваемой на двигатель, и этот тип управления называется широтно-импульсной модуляцией или ШИМ.
Другим способом управления частотой вращения двигателя является изменение частоты (и, следовательно, периода времени управляющего напряжения), в то время как времена коэффициента включения «ВКЛ» и «ВЫКЛ» поддерживаются постоянными. Этот тип управления называется частотно-импульсной модуляцией или PFM .
При частотно-импульсной модуляции напряжение двигателя регулируется путем подачи импульсов переменной частоты, например, на низкой частоте или с очень небольшим количеством импульсов, среднее напряжение, подаваемое на двигатель, является низким, и, следовательно, скорость двигателя является низкой. При более высокой частоте или множестве импульсов среднее напряжение на клеммах двигателя увеличивается, и скорость двигателя также увеличивается.
Затем транзисторы можно использовать для управления количеством энергии, подаваемой на двигатель постоянного тока с режимом работы: «линейная» (изменение напряжения двигателя), «широтно-импульсная модуляция» (изменение ширины импульса) или «частотно — импульсная модуляция»(изменение частоты импульса).
Изменение направления движения двигателя постоянного тока
Хотя управление скоростью двигателя постоянного тока с помощью одного транзистора имеет много преимуществ, оно также имеет один главный недостаток: направление вращения всегда одинаковое, это «однонаправленная» схема. Во многих случаях нам необходимо управлять двигателем в обоих направлениях вперед и назад.
Для управления направлением двигателя постоянного тока необходимо поменять полярность питания постоянного тока, подаваемого на соединения двигателя, чтобы его вал вращался в противоположном направлении. Один очень простой и дешевый способ управления направлением вращения двигателя постоянного тока состоит в использовании различных переключателей, расположенных следующим образом:

В первом контуре используется одинарный двухполюсный, двухходовый переключатель (DPDT) для контроля полярности соединений двигателей. При переключении контактов подача на клеммы двигателя изменяется, и двигатель меняет направление. Второй контур немного сложнее и использует четыре однополюсных, одноходовых (SPST) переключателя, расположенных в «H» -конфигурации.
Механические переключатели расположены в виде пары переключений и должны работать в определенной комбинации для работы или остановки двигателя постоянного тока. Например, комбинация переключателей A + D управляет вращением вперед, в то время как переключатели B + C управляют вращением назад, как показано на рисунке. Комбинации переключателей A + B или C + D замыкают клеммы двигателя, вызывая его быстрое торможение. Тем не менее, использование переключателей таким образом имеет свои опасности, так как рабочие переключатели A + C или B + D вместе отключат источник питания.
В то время как две вышеупомянутые схемы будут очень хорошо работать для большинства небольших двигателей постоянного тока, мы действительно хотим использовать различные комбинации механических переключателей только для изменения направления вращения двигателя, НЕТ! Мы могли бы изменить ручные переключатели для набора электромеханических реле и иметь одну кнопку прямого или обратного хода или даже использовать твердотельный четырехпозиционный двусторонний переключатель CMOS 4066B.
Но еще один очень хороший способ достижения двунаправленного управления двигателем (а также его скоростью) состоит в том, чтобы подключить двигатель к схеме транзисторного типа H-моста, как показано ниже.
H-мостовая схема двигателя

Схема H-моста, приведенная выше, названа так потому, что базовая конфигурация четырех переключателей, либо электромеханических реле, либо транзисторов, напоминает букву «H» с двигателем, расположенным на центральной шине. Транзистор или МОП-транзистор является, вероятно, одним из наиболее часто используемых типов двунаправленных цепей управления двигателем постоянного тока. Он использует «комплементарные пары транзисторов» как NPN, так и PNP в каждой ветви, причем транзисторы попарно объединяются для управления двигателем.
Управляющий вход A управляет двигателем в одном направлении, т.е. вращением вперед, в то время как вход B управляет двигателем в другом направлении, т.е. обратным вращением. Затем переключение транзисторов «ВКЛ» или «ВЫКЛ» в их «диагональных парах» приводит к направленному управлению двигателем.
Например, когда транзистор TR1 включен, а транзистор TR2 выключен, точка A подключена к напряжению питания (+ Vcc), а если транзистор TR3 выключен, а транзистор TR4 включен, точка B подключена к 0 вольт (GND). Затем двигатель будет вращаться в одном направлении, соответствующем положению клеммы А двигателя и положительной клемме В двигателя.
Если состояния переключения меняются местами так, что TR1 — «ВЫКЛ», TR2 — «ВКЛ», TR3 — «ВКЛ» и TR4 — «ВЫКЛ», ток двигателя будет течь в противоположном направлении, вызывая вращение двигателя в противоположном направлении.
Затем, применяя противоположные логические уровни «1» или «0» к входам A и B, направление вращения двигателя можно регулировать следующим образом.
Таблица истинности H-моста
| Вход А | Вход B | Функция двигателя |
| TR1 и TR4 | TR2 и TR3 | |
| 0 | 0 | Двигатель остановлен (OFF) |
| 1 | 0 | Мотор вращается вперед |
| 0 | 1 | Мотор вращается задним ходом |
| 1 | 1 | НЕ ПОЛОЖЕНО |
Важно, чтобы никакая другая комбинация входов не допускалась, так как это может привести к короткому замыканию источника питания, то есть оба транзистора, TR1 и TR2, были включены в одно и то же время (предохранитель = взрыв!).
Как и в случае однонаправленного управления двигателем постоянного тока, как показано выше, скорость вращения двигателя также можно регулировать с помощью широтно-импульсной модуляции или ШИМ. Затем, комбинируя переключение Н-моста с ШИМ-управлением, можно точно контролировать направление и скорость двигателя.
Имеющиеся в продаже готовые ИС- декодеры, такие как четырехполупроводниковая ИС H-моста SN754410 или L298N с двумя H-мостами, доступны со всей необходимой встроенной логикой управления и безопасности, специально разработанные для двунаправленных цепей управления двигателем H-моста.
Электродвигатели постоянного тока. Устройство и работа. Виды
Электрические двигатели, приводящиеся в движение путем воздействия постоянного тока, применяются значительно реже, по сравнению с двигателями, работающими от переменного тока. В бытовых условиях электродвигатели постоянного тока используются в детских игрушках, с питанием от обычных батареек с постоянным током. На производстве электродвигатели постоянного тока приводят в действие различные агрегаты и оборудование. Питание для них подводится от мощных батарей аккумуляторов.
Устройство и принцип работы
Электродвигатели постоянного тока по конструкции подобны синхронным двигателям переменного тока, с разницей в типе тока. В простых демонстрационных моделях двигателя применяли один магнит и рамку с проходящим по ней током. Такое устройство рассматривалось в качестве простого примера. Современные двигатели являются совершенными сложными устройствами, способными развивать большую мощность.
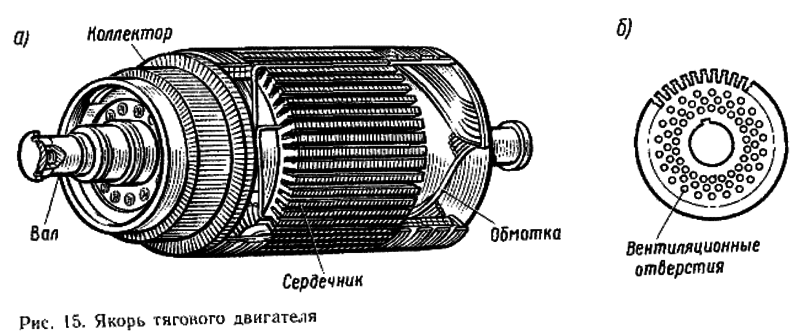
Главной обмоткой двигателя служит якорь, на который подается питание через коллектор и щеточный механизм. Он совершает вращательное движение в магнитном поле, образованном полюсами статора (корпуса двигателя). Якорь изготавливается из нескольких обмоток, уложенных в его пазах, и закрепленных там специальным эпоксидным составом.
Статор может состоять из обмоток возбуждения или из постоянных магнитов. В маломощных двигателях используют постоянные магниты, а в двигателях с повышенной мощностью статор снабжен обмотками возбуждения. Статор с торцов закрыт крышками со встроенными в них подшипниками, служащими для вращения вала якоря. На одном конце этого вала закреплен охлаждающий вентилятор, который создает напор воздуха и прогоняет его по внутренней части двигателя во время работы.
Принцип действия такого двигателя основывается на законе Ампера. При размещении проволочной рамки в магнитном поле, она будет вращаться. Проходящий по ней ток создает вокруг себя магнитное поле, взаимодействующее с внешним магнитным полем, что приводит к вращению рамки. В современной конструкции мотора роль рамки играет якорь с обмотками. На них подается ток, в результате вокруг якоря создается магнитное поле, которое приводит его во вращательное движение.
Для поочередной подачи тока на обмотки якоря применяются специальные щетки из сплава графита и меди.
Выводы обмоток якоря объединены в один узел, называемый коллектором, выполненным в виде кольца из ламелей, закрепленных на валу якоря. При вращении вала щетки по очереди подают питание на обмотки якоря через ламели коллектора. В результате вал двигателя вращается с равномерной скоростью. Чем больше обмоток имеет якорь, тем равномернее будет работать двигатель.
Щеточный узел является наиболее уязвимым механизмом в конструкции двигателя. Во время работы медно-графитовые щетки притираются к коллектору, повторяя его форму, и с постоянным усилием прижимаются к нему. В процессе эксплуатации щетки изнашиваются, а токопроводящая пыль, являющаяся продуктом этого износа, оседает на деталях двигателя. Эту пыль необходимо периодически удалять. Обычно удаление пыли выполняют воздухом под большим давлением.
Щетки требуют периодического их перемещения в пазах и продувки воздухом, так как от накопившейся пыли они могут застрять в направляющих пазах. Это приведет к зависанию щеток над коллектором и нарушению работы двигателя. Щетки периодически требуют замены из-за их износа. В месте контакта коллектора со щетками также происходит износ коллектора. Поэтому при износе якорь снимают и на токарном станке протачивают коллектор. После проточки коллектора изоляция, находящаяся между ламелями коллектора стачивается на небольшую глубину, чтобы она не разрушала щетки, так как ее прочность значительно превышает прочность щеток.
Виды
Электродвигатели постоянного тока разделяют по характеру возбуждения:
Независимое возбуждение
При таком характере возбуждения обмотка подключается к внешнему источнику питания. При этом параметры двигателя аналогичны двигателю на постоянных магнитах. Обороты вращения настраиваются сопротивлением обмоток якоря. Скорость регулируют специальным регулировочным реостатом, включенным в цепь обмоток возбуждения. При значительном снижении сопротивления или при обрыве цепи ток якоря повышается до опасных величин.
Электродвигатели с независимым возбуждением запрещается запускать без нагрузки или с небольшой нагрузкой, так как его скорость резко возрастет, и двигатель выйдет из строя.
Параллельное возбуждение
Обмотки возбуждения и ротора соединяются параллельно с одним источником тока. При такой схеме ток обмотки возбуждения значительно ниже тока ротора. Параметры двигателей становятся слишком жесткими, их можно применять для привода вентиляторов и станков.
Регулировка оборотов двигателя обеспечивается реостатом в последовательной цепи с обмотками возбуждения или в цепи ротора.
Последовательное возбуждение
В этом случае возбуждающая обмотка подключается последовательно с якорем, в результате чего по этим обмоткам проходит одинаковый ток. Обороты вращения такого мотора зависят от его нагрузки. Двигатель нельзя запускать на холостом ходу без нагрузки. Однако такой двигатель обладает приличными пусковыми параметрами, поэтому подобная схема используется в работе тяжелого электротранспорта.
Смешанное возбуждение
Такая схема предусматривает применение двух обмоток возбуждения, находящихся парами на каждом полюсе двигателя. Эти обмотки можно соединять двумя способами: с суммированием потоков, либо с их вычитанием. В итоге электродвигатель может обладать такими же характеристиками, как у двигателей с параллельным или последовательным возбуждением.
Чтобы заставить двигатель вращаться в другую сторону, на одной из обмоток изменяют полярность. Для управления скоростью вращения мотора и его запуском используют ступенчатое переключение разных резисторов.
Особенности эксплуатации
Электродвигатели постоянного тока отличаются экологичностью и надежностью. Их главным отличием от двигателей переменного тока является возможность регулировки оборотов вращения в большом диапазоне.
Такие электродвигатели постоянного тока можно также применять в качестве генератора. Изменив направление тока в обмотке возбуждения или в якоре, можно изменять направление вращения двигателя. Регулировка оборотов вала двигателя осуществляется с помощью переменного резистора. В двигателях с последовательной схемой возбуждения это сопротивление расположено в цепи якоря и позволяет уменьшить скорость вращения в 2-3 раза.
Этот вариант подходит для механизмов с длительным временем простоя, так как при работе реостат сильно нагревается. Повышение оборотов создается путем включения в цепь возбуждающей обмотки реостата.
Для моторов с параллельной схемой возбуждения в цепи якоря также применяются реостаты для уменьшения оборотов в два раза. Если в цепь обмотки возбуждения подключить сопротивление, то это позволит повышать обороты до 4 раз.
Применение реостата связано с выделением тепла. Поэтому в современных конструкциях двигателей реостаты заменяют электронными элементами, управляющими скоростью без сильного нагревания.
На коэффициент полезного действия мотора, работающего на постоянном токе, влияет его мощность. Слабые электродвигатели постоянного тока обладают малой эффективностью, и их КПД около 40%, в то время, как электродвигатели мощностью 1 МВт могут обладать коэффициентом полезного действия до 96%.
Преимущества электродвигателей постоянного тока
- Небольшие габаритные размеры.
- Легкое управление.
- Простая конструкция.
- Возможность применения в качестве генераторов тока.
- Быстрый запуск, особенно характерный для моторов с последовательной схемой возбуждения.
- Возможность плавной регулировки скорости вращения вала.
Недостатки
- Для подключения и эксплуатации необходимо приобретать специальный блок питания постоянного тока.
- Высокая стоимость.
- Наличие расходных элементов в виде медно-графитных быстроизнашивающихся щеток, изнашивающегося коллектора, что значительно снижает срок эксплуатации, и требует периодического технического обслуживания.
Сфера использования
Широко популярными двигатели постоянного тока стали в электрическом транспорте. Такие двигатели обычно входят в конструкции:
- Электромобилей.
- Электровозов.
- Трамваев.
- Электричек.
- Троллейбусов.
- Подъемно-транспортных механизмов.
- Детских игрушек.
- Промышленного оборудования с необходимостью управлением скорости вращения в большом диапазоне.
Похожие темы:
Двигатель постоянного тока — это… Что такое Двигатель постоянного тока?
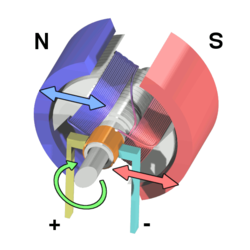
Рис. 1 Устройство простейшего коллекторного двигателя постоянного тока с двухполюсным статором и с двухполюсным ротором
Двигатель постоянного тока — электрическая машина, машина постоянного тока, преобразующая электрическую энергию постоянного тока в механическую энергию.
История
Краткое описание коллекторного двигателя постоянного тока
Простейший двигатель на рис. 1 является машиной постоянного тока, состоит из одного постоянного магнита на статоре, из одного электромагнита с явно выраженными полюсами на роторе (двухполюсного ротора с явно выраженными полюсами и с одной обмоткой из двух частей), щёточноколлекторного узла с двумя пластинами (ламелями) и двумя щётками. Имеет два положения ротора (две «мёртвые точки»), из которых невозможен самозапуск, и неравномерный крутящий момент, в первом приближении (магнитное поле полюсов статора B — равномерное (однородное) и др.) равный
 , где
, где  — число витков обмотки ротора,
— число витков обмотки ротора,  — индукция магнитного поля полюсов статора,
— индукция магнитного поля полюсов статора,  — ток в обмотке ротора [А],
— ток в обмотке ротора [А], 
 — расстояние от оси ротора до рабочей части витка обмотки ротора (радиус) [м],
— расстояние от оси ротора до рабочей части витка обмотки ротора (радиус) [м],  — синус угла между направлением северный-южный полюс статора и аналогичным направлением в роторе [рад],
— синус угла между направлением северный-южный полюс статора и аналогичным направлением в роторе [рад],  — угловая скорость [рад/сек],
— угловая скорость [рад/сек], 
Из-за наличия угловой ширины щёток и углового зазора между пластинами (ламелями) коллектора в двигателе этой конструкции имеются динамически постоянно короткозамкнутые щётками части обмотки ротора. Число короткозамкнутых частей обмотки ротора равно числу щёток. Эти короткозамкнутые части обмотки ротора не участвует в создании общего крутящего момента.
Суммарная короткозамкнутая часть ротора в двигателях с одним коллектором равна:
 , где n — число щёток, alfa — угловая ширина одной щётки [радиан].
, где n — число щёток, alfa — угловая ширина одной щётки [радиан].
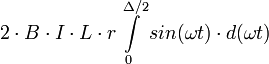
Без учёта короткозамкнутых щётками частей крутящего момента средний крутящий момент s рамок (витков) с током за один оборот равен площади под интегральной кривой крутящего момента, делённой на длину периода (1оборот =  ):
):

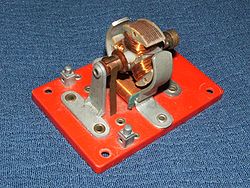
Рис. 2 Коллекторный двигатель постоянного тока с двухполюсным статором и с трёхполюсным ротором
Двигатель на рис. 2 состоит из одного электромагнита на статоре (двухполюсного статора) с явно выраженными полюсами и с одной обмоткой, трёхполюсного ротора с явно выраженными полюсами и с тремя обмотками (обмотки ротора могут быть включены звездой или треугольником), щёточноколлекторного узла с тремя пластинами (ламелями) и с двумя щётками. Самозапуск возможен из любого положения ротора. Имеет меньшую неравномерность крутящего момента, чем двигатель с двухполюсным ротором (рис. 1).
ДПТ являются обратимыми электрическими машинами, то есть в определённых условиях способны работать как генераторы.
Сокращение ДПТ (двигатель постоянного тока) является неудачным, так как название «двигатель переменного тока» имеет то же сокращение — ДПТ. Но так как двигатели переменного тока разделяются на ассинхронные (АД) и синхронные (СД), сокращение ДПТ относят к двигателям постоянного тока.
Статор
На статоре ДПТ располагаются в зависимости от конструкции:
- постоянные магниты
- электромагниты с обмотками возбуждения — катушки, наводящие магнитный поток возбуждения
В простейшем случае имеет два полюса, т.е. один магнит с одной парой полюсов.
Ротор
Состоит из электромагнитов с переключаемой полярностью и датчика положения ротора и переключателя (коллектора). В простейшем случае ротор состоит из одного электромагнита с двумя полюсами, т.е. имеет одну пару полюсов, при этом есть две «мёртвые точки» из которых невозможен самозапуск двигателя.
Рис. 3 Ротор
Ротор с тремя полюсами (полторы пары) имеет наименьшее число полюсов ротора при которых самозапуск возможен из любого положения ротора. На самом деле один полюс всё время делится на две части, т.е. ротор имеет неявные две пары полюсов. Ротор любого ДПТ состоит из многих катушек, на часть которых подаётся питание в зависимости от угла поворота ротора относительно статора. Применение большого числа (несколько десятков) катушек необходимо для уменьшения неравномерности крутящего момента, для уменьшения коммутируемого (переключаемого) тока, для обеспечения оптимального взаимодействия между магнитными полями ротора и статора (то есть для создания максимального момента на роторе).
При вычислении момента инерции ротора его в первом приближении можно считать сплошным однородным цилиндром с моментом инерции равным  где
где  — масса цилиндра (ротора), а
— масса цилиндра (ротора), а  — радиус цилиндра (ротора).
— радиус цилиндра (ротора).
Коллектор (коллекторный узел, щёточный узел, коллекторно-щёточный узел, щёточно-коллекторный узел)
Коллектор (щёточно-коллекторный узел) выполняет одновременно две функции — является датчиком углового положения ротора и переключателем тока со скользящими контактами.
Конструкции коллекторов имеют множество разновидностей.
Выводы всех катушек объединяются в коллекторный узел. Коллекторный узел обычно представляет собой кольцо из изолированных друг от друга пластин-контактов (ламелей), расположенных по оси (вдоль оси) ротора. Существуют и другие конструкции коллекторного узла.
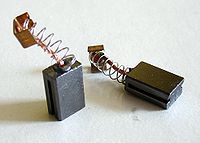
Рис. 4 Графитовые щётки
Щёточный узел необходим для подвода электроэнергии к катушкам на вращающемся роторе и переключения тока в обмотках ротора. Щётка — неподвижный контакт (обычно графитовый или медно-графитовый).
Щётки часто размыкают и замыкают пластины-контакты коллектора ротора, как следствие при работе ДПТ происходят переходные процессы в обмотках ротора. Эти процессы приводят к искрению на коллекторе, что значительно снижает ресурс ДПТ. Искрение уменьшают выбором положения щёток относительно статора (снижая ток коммутации), а также подключением внешних реактивных элементов (конденсаторов).
При больших токах в роторе ДПТ возникают мощные переходные процессы, в результате чего искрение может постоянно охватывать все пластины коллектора, независимо от положения щёток. Данное явление называется кольцевым искрением коллектора или «круговой огонь». Кольцевое искрение опасно тем, что одновременно выгорают все пластины коллектора и срок его службы значительно сокращается. Визуально кольцевое искрение проявляется в виде светящегося кольца около коллектора. Эффект кольцевого искрения коллектора не допустим, при проектировании приводов устанавливаются соответствующие ограничения на максимальные моменты (а следовательно и токи в роторе), развиваемые двигателем.
Классификация
- По виду магнитной системы статора
- С постоянными магнитами
- С электромагнитами
- По способу включения обмоток возбуждения электромагнитов статора
Двигатели постоянного тока различаются по способу коммутации обмоток возбуждения. Вид подключения обмоток возбуждения существенно влияет на тяговые и электрические характеристики электродвигателя. Существуют схемы независимого, параллельного, последовательного и смешанного включения обмоток возбуждения.
Принцип работы
В принципе работы электродвигателя постоянного тока есть два подхода: 1. рамка (2 стержня) с током в магнитном поле статора, 2. взаимодействие магнитных полей статора и ротора.
Рамка с током в однородном магнитном поле полюсов статора
В однородном магнитном поле полюсов статора с индукцией на два стержня рамки длиной с током действуют силы Ампера  постоянной величины, равные
постоянной величины, равные
 и направленные в противоположные стороны.
и направленные в противоположные стороны.
Эти силы прикладываются к плечам  , равным
, равным
 , где — радиус рамки, и создают крутящий момент
, где — радиус рамки, и создают крутящий момент  , равный
, равный
 .
.
Для двух стержней рамки суммарный крутящий момент равен
 . Практически из-за того, что угловая ширина щётки
. Практически из-за того, что угловая ширина щётки  [радиан] немного меньше угловой ширины зазора
[радиан] немного меньше угловой ширины зазора 
 , где
, где  , не участвуют в создании общего крутящего момента.
, не участвуют в создании общего крутящего момента.При числе витков в обмотке равном s крутящий момент будет равен .
Наибольший крутящий момент будет при угле поворота рамки равном  , т.е. 90°, при этом угле поворота рамки с током вектора магнитных полей статора и ротора (рамки) будут перпендикулярны друг к другу, т.е. под углом 90°. При угле поворота ротора (рамки) 180° крутящий момент равен нулю из-за нулевого плеча, но силы не равны нулю и это положение ротора (рамки), при отсутствии переключения тока, весьма устойчиво и подобно одному шагу в шаговом двигателе.
, т.е. 90°, при этом угле поворота рамки с током вектора магнитных полей статора и ротора (рамки) будут перпендикулярны друг к другу, т.е. под углом 90°. При угле поворота ротора (рамки) 180° крутящий момент равен нулю из-за нулевого плеча, но силы не равны нулю и это положение ротора (рамки), при отсутствии переключения тока, весьма устойчиво и подобно одному шагу в шаговом двигателе.
Без учёта короткозамкнутых щётками частей крутящего момента средний крутящий момент за один оборот (период) равен площади под интегральной кривой крутящего момента делённой на длину периода  :
:

При s витков в обмотке

Две рамки с током в однородном магнитном поле полюсов статора
Если на роторе машины установить вторую рамку, сдвинутую относительно первой на угол π / 2, то получится четырёхполюсный ротор. Момент второй рамки:

Суммарный момент обеих рамок:

Таким образом получается, что крутящий момент зависит от угла поворота ротора, но неравномерность меньше, чем при одной рамке. Кроме этого добавляется самозапуск из любого положения ротора. При этом для второй рамки потребуется второй коллектор (щёточно-коллекторный узел). Оба узла соединяются параллельно, при этом переключение тока в рамках происходит в интервалах с наименьшим током в рамках, при последовательном соединении переключение тока в одной из рамок (разрыв цепи) происходит во время максимального тока в другой рамке. Практически, из-за того, что угловая ширина щётки α [рад] немного меньше угловой ширины зазора β [рад] между пластинами коллектора (ламелями) восемь небольших частей под кривой крутящего момента, равных
 , где Δ = β − α, не участвуют в создании общего крутящего момента.
, где Δ = β − α, не участвуют в создании общего крутящего момента.
Рамка с током в неоднородном магнитном поле полюсов статора
Если магнитное поле полюсов статора неоднородное и изменяется по отношению к стержням рамки по закону
 , то крутящий момент для одного стержня будет равен
, то крутящий момент для одного стержня будет равен
 ,
,
для двух стержней
 ,
,
для рамки из витков
 .
.
В создании крутящего момента не участвуют четыре части под кривой крутящего момента равные
 .
.
Без учёта короткозамкнутых щётками частей крутящего момента средний крутящий момент за один оборот (период) равен площади под интегральной кривой делённой на длину периода :

При s витках в обмотке

Две рамки с током в неоднородном магнитном поле полюсов статора
Для второй (косинусной) рамки  ,
,
крутящий момент от второй (косинусной) рамки будет равен
 ,
,
суммарный крутящий момент от обеих рамок равен
 , т.е. постоянен и от угла поворота ротора не зависит.
, т.е. постоянен и от угла поворота ротора не зависит.
Практически, из-за наличия зазора, восемь небольших частей под кривой крутящего момента равные
 каждая,
каждая,
в создании крутящего момента не участвуют.
Для вычисления момента инерции ротора его можно считать в первом приближении сплошным однородным цилиндром с моментом инерции
 , где — масса цилиндра (ротора), — радиус цилиндра (ротора).
, где — масса цилиндра (ротора), — радиус цилиндра (ротора).
Взаимодействие магнитных полей
Магнитные поля статора и ротора (рамки с током), взаимоотталкиваются, чем ротор (рамка) приводится во вращение на 180°. Для дальнейшего вращения необходимо переключение направления тока в рамке.
Разновидности
Коллекторные, с щёточноколлекторным переключателем тока
С одним коллектором (щёточноколлекторным узлом) и  обмотками, где
обмотками, где  — число пар полюсов ротора, с соединением обмоток ротора в кольцо (по этой классификации двигатель на рис. 2 является полуторным, имеет полторы пары полюсов и 2*1,5=3 обмотки ротора). Имеют большую короткозамкнутую щётками часть обмотки ротора, равную
— число пар полюсов ротора, с соединением обмоток ротора в кольцо (по этой классификации двигатель на рис. 2 является полуторным, имеет полторы пары полюсов и 2*1,5=3 обмотки ротора). Имеют большую короткозамкнутую щётками часть обмотки ротора, равную
 , где
, где  — число щёток, — угловая ширина одной щётки (рад),
— число щёток, — угловая ширина одной щётки (рад),  — число пи (3,14…).
— число пи (3,14…).
С двумя коллекторами (щёточноколлекторными узлами, в бесколлекторных с инвертором на двух параллельных мостах) и двумя обмотками синусной и косинусной (синусно-косинусный, двухфазный) с неоднородным (синусообразным) магнитным полем полюсов статора. Имеют малую нерабочую часть под кривой крутящего момента, равную
 , где
, где  — угловая ширина зазора между пластинами коллектора (ламелями), подобен двухфазному бесколлекторному.
— угловая ширина зазора между пластинами коллектора (ламелями), подобен двухфазному бесколлекторному.
С тремя коллекторами и тремя обмотками (в бесколлекторных с инвертором на трёх параллельных мостах, трёхфазный).
С четырьмя коллекторами (щёточноколлекторными узлами) и двумя обмотками синусной и косинусной (синусно-косинусные), специальные. Специальная конструкция коллектора с четырьмя коллекторами (один коллектор на одну щётку) позволяет почти до нуля уменьшить нерабочую часть крутящего момента (нерабочая часть крутящего момента в этом двигателе зависит от точности изготовления деталей) и сделать используемую часть крутящего момента независимой от угловой ширины щётки. При этом угловая ширина одной пластины коллектора равна  , где — угловая ширина одной щётки.
, где — угловая ширина одной щётки.
С четырьмя коллекторами и четырьмя обмотками (в бесколлекторных — с инвертором на четырёх параллельных мостах, четырёхфазный).
С восемью коллекторами (щёточноколлекторными узлами). В этом двигателе уже нет рамок, а ток подаётся через коллекторы в отдельные стержни ротора.
И др.
Другие виды электродвигателей постоянного тока
Применение
- Электропривод тепловозов, теплоходов, карьерных самосвалов
- Стартёры автомобилей, тракторов и др. Для уменьшения номинального напряжения двигателя в автомобильных стартёрах применяют двигатель постоянного тока с четырьмя щётками, при этом эквивалентное комплексное сопротивление ротора уменьшается почти в четыре раза, при этом статор имеет четыре полюса (две пары полюсов). Пусковой ток в автомобильных стартёрах около 200 ампер. Режим работы — кратковременный.
Бесколлекторные, с электронным переключателем тока
Электронным аналогом щёточно-коллекторного узла является инвертор с датчиком положения ротора (ДПР) (Вентильный электродвигатель).
Ротор является постоянным магнитом, а обмотки статора переключаются электронными схемами — инверторами. Бесколлекторные электродвигатели могут быть однофазными (две «мёртвые точки»), двухфазными (синусно-косинусными), трёх- и более фазными.
Бесколлекторный двигатель постоянного тока с выпрямителем (мостом) может заменить универсальный коллекторный двигатель (УКД).
Управление ДПТ
Механическая характеристика ДПТ
Зависимость частоты от момента на валу ДПТ. Отображается в виде графика. Горизонтальная ось (абсцисс) — момент на валу ротора, вертикальная ось (ординат) — частота вращения ротора. Механическая характеристика ДПТ есть прямая, идущая с отрицательным наклоном.
Механическая характеристика ДПТ строится при определённом напряжении питания обмоток ротора. В случае построения характеристик для нескольких значений напряжения питания говорят о семействе механических характеристик ДПТ.
Регулировочная характеристика ДПТ
Зависимость частоты вращения ротора от напряжения питания обмоток ротора ДПТ. Отображается в виде графика. Горизонтальная ось (абцисс) — напряжение питания обмоток ротора, вертикальная ось (ординат) — частота вращения ротора. Регулировочная характеристика ДПТ есть прямая, идущая с положительным наклоном.
Регулировочная характеристика ДПТ строится при определённом моменте, развиваемом двигателем. В случае построения регулировочных характеристик для нескольких значений момента на валу ротора говорят о семействе регулировочных характеристик ДПТ.
Управление ДПТ
Основные формулы, используемые при управлении ДПТ:
Крутящий момент, развиваемый двигателем, пропорционален току в обмотке якоря (ротора):
 , где
, где  — ток в обмотке якоря,
— ток в обмотке якоря,  — коэффициент крутящего момента двигателя (зависит от конструкции двигателя и тока в обмотке возбуждения).
— коэффициент крутящего момента двигателя (зависит от конструкции двигателя и тока в обмотке возбуждения).
Ток в обмотке ротора по закону Ома прямо пропорционален приложенному напряжению и обратно пропорционален сопротивлению обмотки ротора:
 , где
, где  — напряжение, приложенное к обмотке ротора,
— напряжение, приложенное к обмотке ротора,  — сопротивление обмотки ротора.
— сопротивление обмотки ротора.
ПротивоЭДС в обмотках якоря пропорциональна угловой частоте вращения ротора:
 , где
, где  — коэффициент ЭДС двигателя,
— коэффициент ЭДС двигателя,  — угловая скорость вращения ротора.
— угловая скорость вращения ротора.
Следовательно, величиной крутящего момента можно управлять меняя напряжение на ДПТ. Такой способ применяют для относительно маломощных двигателей.
Для управления более сильными (мощными) двигателями используют: а) принцип ШИМ, когда изменяется не величина напряжения, а длительность его приложения к двигателю, б) регулирование крутящего момента изменением напряжения на обмотке возбуждения, требует меньшую мощность элементов схемы управления, чем регулирование изменением напряжения на всём двигателе, но при этом способе регулирования ток через обмотку якоря не управляется, из-за этого даже при малом крутящем моменте большой ток через обмотку якоря будет нагревать обмотку якоря, что может привести к перегреву и выходу из строя двигателя. Возможно применение для регулирования крутящего момента в небольших пределах от номинального крутящего момента.
Управление двигателем осуществляется по току в обмотке двигателя, который пропорционален напряжению, приложенному к этой обмотке. Реакцию двигателя на данное напряжение при определённом внешнем моменте можно увидеть на соответствующей регулировочной характеристике. Регулировочная характеристика показывает скорость, которую двигатель достигнет в установившемся режиме.
Достоинства и недостатки ДПТ
Достоинства:
- Простота устройства и управления
- Практически линейные механическая и регулировочная характеристики двигателя
- Легко регулировать частоту вращения.
- Хорошие пусковые свойства (большой пусковой момент).
Недостатки:
- Необходимость профилактического обслуживания коллекторно-щёточных узлов
- Ограниченный срок службы из-за износа коллектора
См. также
Ссылки
Wikimedia Foundation. 2010.
Двигатель постоянного тока (ДПТ) принцип работы, устройство
Двигатели постоянного тока – это специализированные машины, применяемые для того, чтобы делать из энергии постоянного тока механическую.
Что касается принципа работы данной разновидности электрических двигателей, то он может осуществляться двумя способами:
- Магнитные поля статора и ротора взаимодействуют между собой.
- Стержни в количестве двух штук, концы которых замкнуты и рамка подвижного типа, в магнитном поле статора находится ток.
Как устроен двигатель
Если мы посмотрим на простейшие модели для демонстрации, то сможем увидеть лишь один стержень и рамку, по которой проходит ток.

Схема двигателя постоянного тока
Якорь основная обмотка, ток на него подается с помощью коллектора и щеточного механизма. Структура статора может быть двух типов: постоянные магниты или же обмотки возбуждения. Если используются постоянные магниты, то этот двигатель по мощности будет уступать тому, в котором установлены обмотки возбуждения.
Основные параметры электродвигателя постоянного тока
Направление ЭДС, которую навели, всегда противоположно направлению тока в проводнике. Наведенная ЭДС может последовательно изменяться, это будет зависеть главным образом от перемещения проводников в магнитном поле.
Если сложить сумму ЭДС в каждой из катушек, ты мы получим суммарную ЭДС, она является приложением к внешним выводам двигателя. Но главным параметром данной разновидности электрических двигателей является его постоянная. Ей определяется возможность двигателя преобразовывать электроэнергию в механическую.
Постоянная не будет зависеть от соединения обмоток в электродвигатели только если использоваться будет один материал проводника.
Разновидности двигателей постоянного тока
Рассмотрим разновидности двигателей постоянного тока:
- Коллекторный с постоянным магнитом. Индуктор этого двигателя включает в себя постоянный магнит, из которого состоит магнитное поле статора.
- Бесколлекторный (бесщеточный). Различие лишь в отсутствии щеток для замены при износе, из-за искрения коммутатора.
- Серводвигатель постоянного тока. Это привод, ось которого может перемещаться в заданное положение.
Управление здесь соединено печатной платой, двигателем постоянного тока и потенциометром (датчиком). Редуктор преобразует электричество в механическое действие. В результате скорость, с которой вращается выходной вал, снижается до необходимого значения.
Способы возбуждения электродвигателей постоянного тока
В этой разновидности электрических двигателей применяются специальные обмотки, которые называются «обмотками возбуждения». Они приводят в действие сам механизм двигателя.
Независимое возбуждение
При данном типе подключения обмотка накручивается напрямую к источнику питания, при этом, характеристики двигателя с таким способом возбуждения схожи с характеристиками двигателей на постоянных магнитах.
Параллельное возбуждение
Обмотка возбуждения и ротор соединены с одним и тем же источником тока параллельным способом. В этой схеме ток обмотки возбуждения ниже, чем ток Ротора. Последовательное возбуждение. Обмотка последовательно соединяется с якорем. Скорость работы двигателя зависит от его нагрузки.
Смешанное возбуждение
Данная схема предполагает использование двух обмоток возбуждения, расположенных попарно на каждом полюсе электродвигателя. Обмотки могут быть соединены двумя способами: с суммированием или с вычитанием потоков.

Какие существуют способы возбуждения двигателей постоянного тока
Осуществление переключения и контроля двигателей
Данная разновидность двигателей имеет два режима: они могут быть включёнными, либо отключёнными. Такое переключение делается переключателями, реле, транзисторами или же МОП-транзисторами.
В схеме управления используется биполярный транзистор, он играет ключевую роль в переключении режимов.
Контроль скорости двигателя
Потому как скорость данной разновидности двигателей является пропорциональной напряжению на клеммах, можно использовать транзистор для регулирования напряжения на них. Эти два транзистора подключены как пара для управления током главного ротора.
Регулировка скорости импульса
Скорость вращения данной разновидности электрических двигателей является пропорциональной среднему давлению на второй клемме.
Изменение направления движения двигателя постоянного тока
Есть много преимуществ в управлении скоростью данной разновидности электрических двигателей, но есть один большой недостаток: направление вращения всегда одно и то же. Во многих случаях машина действует по простому принципу, чтобы двигаться вперед и назад. H-мостовая схема двигателя.
Базовая конфигурация четырех переключателей, будь то электромеханические реле или транзисторы, аналогична букве Н с двигателем, расположенным на шине посередине.
Особенности эксплуатации
Двигатель оснащен механизмами защиты от перегрузки. Предохранение необходимо сделать с задержкой по времени. Защита должна действовать в отрыве, или сигнально, или вентиляционно, если возможен такой вариант.

Схема Н-моста

Подробная таблица истинности Н-моста электродвигателя
Сфера использования
На электростанциях они устанавливаются как генераторы для изготовления оборудования, автомобилей и даже различного рода быттехники. Сегодня в каждом доме есть устройство с мотором переменного тока.
Заключение
Надеемся, что после прочтения этой статьи у вас не осталось вопросов относительно данной разновидности электрических двигателей. Если вы хотите получать больше информации по этой теме, а также по теме асинхронных двигателей и сборки металлоискателей своими руками, подписывайтесь на нашу группу в социальной сети «вконтакте».
Конструкция электродвигателя постоянного тока: видео — Asutpp
Как известно, электродвигатель постоянного тока – это устройство, которое с помощью двух своих основных деталей конструкции может преобразовывать электрическую энергию в механическую. К таким основным деталям относятся:
- статор – неподвижная/статическая часть двигателя, которая вмещает в себе обмотки возбуждения на которые поступает питание;
- ротор – вращающаяся часть двигателя, которая отвечает за механические вращения.
Кроме вышеупомянутых основных деталей конструкции электродвигателя постоянного тока, существуют также и вспомогательные детали, такие как:
- хомут;
- полюса;
- обмотка возбуждения;
- обмотка якоря;
- коллектор;
- щётки.

В совокупности все эти детали составляют цельную конструкцию электродвигателя постоянного тока. А теперь давайте более подробно рассмотрим основные детали электродвигателя.
Ярмо ДПТ
 Ярмо ДПТ
Ярмо ДПТЯрмо электродвигателя постоянного тока, которое изготавливают в основном из чугуна или стали, является неотъемлемой частью статора или статической частью электродвигателя. Его основная функция состоит в формировании специального защитного покрытия для более утончённых внутренних деталей двигателя, а также обеспечение поддержки для обмотки якоря. Кроме того, ярмо служит защитным покрытием для магнитных полюсов и обмотки возбуждения ДПТ, обеспечивая тем самым поддержку для всей системы возбуждения.
Полюса
 Полюса двигателя постоянного тока
Полюса двигателя постоянного токаМагнитные полюса электродвигателя постоянного тока – это корпусные детали, которые крепятся болтами к внутренней стенке статора. Конструкция магнитных полюсов содержит в своей основе только две детали, а именно – сердечник полюса и полюсный наконечник, которые состыкованы друг к другу под влиянием гидравлического давления и прикреплённые к статору.
Видео: Конструкция и сборка электродвигателя постоянного тока
Несмотря на это, эти две части предназначены для разных целей. Полюсный сердечник, например, имеет маленькую площадь поперечного сечения и используется, чтобы удерживать полюсный наконечник на ярмо, тогда как полюсный наконечник, имея относительно большую площадь поперечного сечения, используется для распространения магнитного потока созданного над воздушным зазором между статором и ротором, чтобы уменьшить потерю магнитного сопротивления. Кроме того, полюсный наконечник имеет множество канавок для обмоток возбуждения, которые и создают магнитный поток возбуждения.
Обмотка возбуждения
 Обмотка возбуждения
Обмотка возбужденияОбмотки возбуждения электродвигателя постоянного тока выполнены вместе с катушками возбуждения (медный провод) навитыми на канавки полюсных наконечников таким образом, что когда ток возбуждения проходит сквозь обмотку, у смежных полюсов возникает противоположная полярность. По существу, обмотки возбуждения выступают в роли некоего электромагнита, способного создать поток возбуждения, внутри которого вращался бы ротор электродвигателя, а потом легко и эффективно его остановить.
Обмотка якоря
 Обмотка якоря электродвигателя постоянного тока
Обмотка якоря электродвигателя постоянного токаОбмотка якоря электродвигателя постоянного тока прикреплена к ротору или вращающейся части механизма, и, как результат, попадает под действие изменяющегося магнитного поля на пути его вращения, что напрямую приводит к потерям на намагничивание.
По этой причине ротор делают из нескольких низко-гистерезисных пластин электротехнической стали, чтобы снизить магнитные потери, типа потери на гистерезис и потери на вихревые токи соответственно. Ламинированные стальные пластины состыковывают друг к другу, чтобы тело якоря получило цилиндрическую структуру.
Тело якоря состоит из канавок (пазов), сделанных из того же материала, что и сердечник, к которому закреплены обмотки якоря и несколько равномерно распределённых по периферии якоря витков медного провода. Пазы канавок имеют пористые клинообразные спаи, чтобы в последствие источаемой во время вращения ротора большой центробежной силы, а также при наличии тока питания и магнитного возбуждения, предотвратить загибания проводника.
Существует два типа конструкции обмотки якоря электродвигателя постоянного тока:
- петлевая обмотка (у данном случае количество параллельных путей тока между переходниками (А) равно количеству полюсов (Р), то есть А = Р.
- волновая обмотка (у данном случае количество параллельных путей тока между переходниками (А) всегда равно 2, независимо от количества полюсов, то есть конструкции машины выполнены соответствующим образом).
Коллектор
 Коллектор ДПТ
Коллектор ДПТКоллектор электродвигателя постоянного тока – это цилиндрическая структура из состыкованных между собой, но изолированных слюдой, медных сегментов. Если речь идет об ДПТ, то коллектор здесь используется в основном как средство коммутирования или передачи через щётки электродвигателя тока питания от сети на смонтированные во вращающейся структуре обмотки якоря.
Щётки
 Щётки электродвигателя постоянного тока
Щётки электродвигателя постоянного токаЩётки электродвигателя постоянного тока изготавливают из углеродных или графитных структур, создавая над вращающимся коллектором скользящий контакт или ползунок. Щётки используют для передачи электрического тока от внешнего контура на вращающуюся форму коллектора, где дальше он поступает на обмотки якоря. Коллектор и щётки электродвигателя используют, в общем, для передачи электрической энергии от статического электрического контура на область с механическим вращением, или просто ротор.
устройство и принцип действия, конструкция и управление, применение дпт
 Устройство, которое преобразует электрическую энергию в механическую, может использоваться как двигатель или генератор, так как конструкция и принцип действия двигателя постоянного тока (ДПТ) аналогична конструкции генератора. Особенностью ДПТ является механический инвертор (коммутатор). Этот коммутатор имеет скользящие контакты в виде щёток, которые расположены так, что они изменяют полярность обмоток якоря (катушек) во время вращательного движения.
Устройство, которое преобразует электрическую энергию в механическую, может использоваться как двигатель или генератор, так как конструкция и принцип действия двигателя постоянного тока (ДПТ) аналогична конструкции генератора. Особенностью ДПТ является механический инвертор (коммутатор). Этот коммутатор имеет скользящие контакты в виде щёток, которые расположены так, что они изменяют полярность обмоток якоря (катушек) во время вращательного движения.
Особенности и устройство ДПТ
ДПТ представляет собой вращающуюся электрическую машину, работающую от постоянного тока. В зависимости от направления потока мощности проводится различие между двигателем (электродвигатель с электрической и механической мощностью) и генератором (электрический генератор, на который подаётся механическая мощность, а также электроэнергия). ДПТ могут запускаться под нагрузкой, их скорость легко изменить. В режиме генератора ДПТ преобразует напряжение переменного тока, подаваемое ротором, в пульсирующее постоянное напряжение.
История изобретения
Основываясь на развитии первых гальванических элементов в первой половине XIX века, первыми электромеханическими преобразователями энергии были машины постоянного тока. Первоначальная форма электродвигателя была разработана в 1829 году, а в 1832 году француз Ипполит Пиксии построил первый генератор. Антонио Пачинотти построил в 1860 году электродвигатель постоянного тока с многокомпонентным коммутатором. Фридрих фон Хефнер-Алтенек разработал барабанный якорь в 1872 году, который открыл возможность промышленного использования в области крупномасштабного машиностроения.
В последующие десятилетия такие машины из-за развития трехфазного переменного тока потеряли свою значимость в крупномасштабном машиностроении. Синхронные машины и системы с низким уровнем обслуживания асинхронного двигателя заменили их во многих устройствах.
Конструкция двигателя
Чтобы понять принцип действия ДПТ, нужно сначала изучить его конструктивные особенности, одной из которых является то, что в магнитном поле постоянного магнита установлен вращающийся проводящий контур.

Упрощая эту структуру, можно сказать, что двигатель состоит из двух основных компонентов:
- Основной магнит (постоянный магнит), который прикреплён к статору. Магнитное поле также может быть электрически сгенерировано. На статоре находятся так называемые возбуждающие обмотки (катушки).
- Проводящая петля (арматура) на сердечнике якоря, обычно состоящая из слоистых металлических листов.
Обе конструкции называются двигателями постоянного тока с внешним возбуждением. Электродинамический закон указывает, что токопроводящая петля проводника в магнитном поле представляет собой силу [F], зависящую от тока [I] и напряжённости магнитного поля [B]. Токопроводящий проводник окружен круговым магнитным полем. Если объединить магнитное поле магнитного поля с магнитным полем проводящей петли, можно обнаружить суперпозицию двух полей, а также результирующий силовой эффект.
Обмотка якоря состоит из двух половин катушки. Если применить напряжение постоянного тока к двум концам обмотки якоря, можно представить, что движущиеся носители заряда поступают в нижнюю половину катушки из верхней половины катушки.
Каждая токопроводящая катушка развивает собственное магнитное поле, и магнитное поле постоянного магнита накладывается на магнитное поле нижней половины катушки и поле верхней половины катушки. Линии поля постоянного магнитного поля всегда одного направления, они всегда показывают с севера на южный полюс. Напротив, поля двух половин катушки имеют противоположные направления.
В левой части поля половины катушки полевые линии поля возбудителя и поля катушки имеют одно и то же направление. Благодаря этому силовому эффекту в противоположном направлении на нижнем и верхнем концах арматуры создаётся крутящий момент, который вызывает вращательное движение якоря.
Якорь представляет собой так называемый двутавровый якорь. Эта конструкция получила название из-за своей формы, которая напоминает два составных «Т». Катушки якоря соединены с платами коммутатора (коллектора). Подача тока в обмотке якоря обычно осуществляется через угольные щётки, которые обеспечивают скользящий контакт с вращающимся коммутатором и подают катушкам электричество. Щётки изготавливаются из самосмазывающихся графитов, частично смешанных с медным порошком для небольших двигателей.
Принцип действия и использование
Это устройство представляет собой электромашину, которая преобразовывает электрическую энергию в механическую. Принцип работы двигателя постоянного тока заключается в том, что всякий раз, когда проводник, переносимый током, помещается в магнитное поле, он испытывает механическую силу.
 Постоянный магнит преобразовывает электрическую энергию в механическую через взаимодействие двух магнитных полей. Одно поле создаётся сборкой постоянными магнитами, другое — электрическим током, протекающим в обмотках двигателя. Эти два поля приводят к крутящему моменту, который имеет тенденцию вращать ротор. Когда ротор вращается, ток в обмотках коммутируется, обеспечивая непрерывный выход крутящего момента.
Постоянный магнит преобразовывает электрическую энергию в механическую через взаимодействие двух магнитных полей. Одно поле создаётся сборкой постоянными магнитами, другое — электрическим током, протекающим в обмотках двигателя. Эти два поля приводят к крутящему моменту, который имеет тенденцию вращать ротор. Когда ротор вращается, ток в обмотках коммутируется, обеспечивая непрерывный выход крутящего момента.
Коммутатор состоит из проводящих сегментов (стержней) из меди, которые представляют собой завершение отдельных катушек проволоки, распределённых вокруг арматуры. Вторая половина механического выключателя комплектуется щётками. Эти щётки обычно остаются неподвижными с корпусом двигателя.
По мере прохождения электрической энергии через щётки и арматуру создаётся крутильная сила в виде реакции между полем двигателя и якорем, вызывающим поворот якоря двигателя. Когда арматура поворачивается, щётки переключаются на соседние полосы на коммутаторе. Это действие переносит электрическую энергию на соседнюю обмотку и якорь.
Движение магнитного поля достигается переключением тока между катушками внутри двигателя. Это действие называется коммутацией. Очень многие двигатели имеют встроенную коммутацию. Это означает, что при вращении двигателя механические щётки автоматически коммутируют катушки на роторе.
Настройка скорости
ДПТ можно легко регулировать. Скорость можно изменить с помощью следующих переменных:
 Напряжение якоря U_A (управление напряжением).
Напряжение якоря U_A (управление напряжением).- Основной поток поля (полевое управление), сила магнитного поля.
- Анкерное сопротивление.
 Напряжение якоря U_A (управление напряжением).
Напряжение якоря U_A (управление напряжением).Простейшим методом управления скоростью вращения является управление приводным напряжением. Чем выше напряжение, тем выше скорость, которую двигатель пытается достичь. Во многих приложениях простое регулирование напряжения может привести к большим потерям мощности в цепи управления, поэтому широко используется метод широтно-импульсной модуляции.
В основном способе с широтно-импульсной модуляцией рабочая мощность включается и выключается для модуляции тока. Отношение времени включения к «выключенному» времени определяет скорость двигателя.
Электродвигатель с внешним возбуждением легко контролировать, поскольку токи через обмотки якоря и статора можно контролировать отдельно. Поэтому такие двигатели имели определённое значение, особенно в области высоко динамичных приводных систем, например, для привода станков с точной регулировкой скорости и крутящего момента.
Современное применение
ДПТ используются в различных областях.

Он является важным элементом в различных продуктах:
- игрушках;
- сервомеханических устройствах;
- приводах клапанов;
- роботах;
- автомобильной электронике.
Высококачественные предметы повседневного назначения (кухонные приборы) используют серводвигатель, известный как универсальный двигатель. Эти универсальные двигатели являются типичными ДПТ, в которых стационарные и вращающиеся катушки представляют собой последовательные провода.
Двигатель постоянного тока. Характеристики и регулирование
После предыдущего поста о мотор-редукторе мне пришло несколько вопросов по регулированию двигателя постоянного тока. Так что пора написать очередной пост 🙂
Двигатель постоянного тока (ДПТ) это один из самых привычных и понятных электродвигателей, он изучается даже в школе, на физике. Он используется практически везде, где нужен малогабаритный моторчик, а также не спешит сдавать своих позиций и там, где мощность измеряется десятками киловатт. О нем и поговорим.
▌Конструктив и базовый принцип
Не буду тут особо распинаться, покажу картинку из википедии и укажу ряд основных узлов. Все остальное вы и так знаете и трогали своими руками.
1. Статор состоит из источника магнитного поля. Далеко не всегда это постоянный магнит, более того, постоянный магнит это скорей исключение, чем правило. Обычно все же это обмотка возбуждения. По крайней мере на всем, что больше кулака по размерам.
2. Якорь состоит из обмотки якоря и коллекторного узла.
Работает все очень и очень просто. Обмотка якоря отталкивается от магнитного поля статора силой Ампера и совершает пол оборота, стремясь вывести эту силу на ноль и таки вывела бы если бы не коллектор, который ловко всех обламывает переключает полярность катушки и сила вновь становится максимальной. И так по кругу. Т.е. коллектор служит механическим инвертором напряжения в якоре. Запомните этот момент, он нам еще пригодится 🙂
Обычно в мелких моторчиках всего два полюса обмотки возбуждения (одна пара) и трехзубцовый якорь. Три зуба это минимум для запуска из любого положения, но чем больше зубцов тем более эффективно используется обмотка, меньше токи и более плавный момент, т.к сила является проекцией на угол, а активный участок обмотки проворачивается на меньший угол
▌Происходящие в двигателе процессы
Думаю многие из вас кто баловался с движками могли заметить, что у них есть ярко выраженный пусковой ток, когда мотор на старте может рвануть стрелку амперметра, например, до ампера, а после разгона ток падает до каких-нибудь 200мА.
Почему это происходит? Это работает противоэдс. Когда двигатель стоит, то ток который через него может пройти зависит только лишь от двух параметров — напряжения питания и сопротивления якорной обмотки. Так что предельный ток который может развить движок и на который следует рассчитывать схему узнать несложно. Достаточно замерить сопротивление обмотки двигателя и поделить на это значение напряжение питания. Просто по закону Ома. Это и будет максимальный ток, пусковой.
Но по мере разгона начинается забавная вещь, обмотка якоря движется поперек магнитного поля статора и в ней наводится ЭДС, как в генераторе, но направлена она встречно той, что вращает двигатель. И в результате, ток через якорь резко снижается, тем больше, чем выше скорость.
А если движок дополнительно еще подкручивать по ходу, то противоэдс будет выше питания и движок начнет вкачивать энергию в систему, став генератором.
▌Немного формул
Не буду грузить никого выводами, их найдете сами если захотите. Чтобы было поменьше матана рекомендую найти учебник по электроприводу для средних учебных заведений и годом выпуска подревней. От 50х-60х годов самое то 🙂 Там и картинки винтажные и расписано для вчерашнего выпускника сельской семилетки. Много букв и никакого грузилова, все четко и по делу.
Самая главная формула коллекторного двигателя постоянного тока:
U = Е + Iя*Rя
- U — напряжение подаваемое на якорь
- Rя — сопротивление якорной цепи. Обычно за этот символ считают только сопротивление обмотки, хотя можно снаружи навесить резистор какой и он к ней приплюсуется. Тогда пишут как (Rя+Rд)
- Iя — ток в якорной цепи. Тот самый который замеряется амперметром при попытке измерять потребление движка 🙂
- Е — это противоэдс или ЭДС генератора, в генераторном режиме. Она зависит от конструкции двигателя, оборотов и описывается вот такой вот простой формулой
Е = Се * Ф * n
- Ce — одна из конструктивных констант. Они зависят от конструкции двигателя, числа полюсов, количества витков, толщин зазоров между якорем и статором. Нам она не особо нужна, при желании ее можно вычислить экспериментально. Главное, что она константа и на форму кривых не влияет 🙂
- Ф — поток возбуждения. Т.е. сила магнитного поля статора. В мелких моторчиках, где оно задается постоянным магнитом это тоже константа. Но бывает под возбуждение выведена отдельная обмотка и тогда мы можем ее менять.
- n — обороты якоря.
Ну и зависимость момента от тока и потока:
М = См * Iя * Ф
См — конструктивная констатнта.
Вот тут стоит обратить внимание, что зависимость момента от тока совершенно прямая. Т.е. просто замеряя ток, при неизменном потоке возбуждения, мы можем совершенно точно узнать величину момента. Это может быть важно, например, чтобы не сломать привод, когда двигло может развить такое усилие, что легко поломает то, что оно там вращает. Особенно с редуктором.
Ну и из этого же следует, что момент у машины постоянного тока зависит только от способности источника снабжать его током. Так что идеальный нерушимый сверхпроводящий движок вам на раз лом в узел завяжет, пусть даже он сам с ноготок будет. Только энергию подавай.
А теперь смешаем все это в кучу и получим зависимость оборотов от момента — механическую характеристику двигателя.
Если ее построить, то будет нечто следующее:
n0 — это обороты идеального холостого хода сферического двигателя в вакууме. Т.е. когда наш движок ну ваще халявит, момент равен нулю. Ток потребления тоже, естественно, ноль. Т.к. противоэдс равна напряжению. Чисто теоретический вариант. А вторая точка строится уже с каким-либо моментом на валу. Получается прямая зависимость оборотов от момента. А наклон характеристики определяется сопротивлением якорной цепи. Если никаких добавочных резисторов там нет, то это зовут естественной характеристикой.
Обороты идеального холостого хода зависят от напряжения и потока. Больше ни от чего. А если поток константа (постоянный магнит), то только от напряжения. Снижая напряжение вся наша характеристика параллельно смещается вниз. Уменьшили напряжение в два раза — скорость упала в два раза.
Если есть возможность менять поток возбуждения, то можно поднимать скорость выше номинальной. Тут зависимость обратная. Ослабляем поток — двигатель разгоняется, но либо падает момент, либо ему надо жрать больше тока.
Иной двигатель со снятием возбуждения может и в разнос пойти. Помнится сдавал я затянувшийся курсач по электроприводу, уже хрен знает спустя сколько времени после сессии. Вломы мне его делать было, ага 🙂 Ну и сидел в лаборатории, ждал препода. А там какие то балбесы, на курс ниже, лабу делали. Крутили движок вхолостую, а возбуждение к стенду приверчено было на соплях и слетело с клеммы. Движок в разнос пошел. У нас в лаборатории ЭПА ЮУРГУ все серьезно было, машины стояли нешуточные, по десятку киловатт и под сотню другую кг каждый. Все на суровом напряжении в 380 вольт.
В общем, когда эта дура взревела как монстр и стала рваться с креплений, я только и успел крикнуть, что все нахер от машины, вырубай к черту. Не успели, двигло сорвало с креплений, обмотка повылетала с пазов и движку пришел кирдык. Ладно никого не покалечило.
Впрочем, лабы привода это то еще развлечение было. У нас там и горело и взрывалось. Там я приобрел замечательные навыки чинить что угодно, чем угодно в сжатые сроки. В среднем, каждый успел по разу убить стенд наглухо, а лаба часто начиналась с починки паяльника, которым чинили осциллограф с помощью которого реанимировали убитый стенд.
Добавляя резисторы в якорную цепь мы можем увеличить наклон, т.е. чем больше грузим тем больше падает скорость.
Метод плох тем, что резисторы в цепи якоря должны быть расчитаны на ток двигателя, т.е. быть мощными и будут греться зря. Ну и момент резко падает, что плохо.
Есть еще двигатели не независимого, а последовательного возбуждения. Это когда обмотка статора включена последовательно якорю. Не каждый двигатель так можно включить, обмотка возбуждения должна выдерживать ток якоря. Но у них возникает одно интересное свойство. При пуске возникает большой пусковой ток и этот пусковой ток является же током возбуждения, обеспечивая огромный пусковой момент. Механическая характеристика напоминает гиперболу с максимумом в районе нулевых оборотов.
А дальше, по мере разгона, момент падает, а обороты наоборот растут. И если нагрузку убрать с вала, то движок сразу же уходит в разнос. Такие движки ставят на тягловый привод в основном. По крайней мере ставили раньше, до развития силовой электроники. С места эта хрень рвет так, что все стритсракеры нервно закуривают.
▌Режимы работы двигателя постоянного тока
Направление вращения движка зависит от направления тока якоря или направления потока возбуждения. Так что если взять коллекторный двигатель и подключить обмотку возбуждения параллельно якорю, то он будет прекрасно вращаться и на переменном токе (универсальные двигатели, их в кухонную технику часто ставят). Т.к. ток будет одновременно меняться и в якоре и в возбуждении. Момент правда будет пульсирующим, но это мелочи. А для реверса там надо будет поменять полярность включения якоря или возбуждения.
Если нарисовать механическую характеристику в четырех квадрантах, то у нас будет нечто похожее на это:
Вот, например, характеристика 1 на I участке у нас машина работает как двигатель. Нагрузка растет и в определенный момент двигатель останавливается и начинает вращаться в обратную сторону, т.е. нагрузка обращает его вспять. Это тормозной режим, противовключение. Режим очень тяжелый, двигло греется просто зверски, но для торможения очень эффективный. Если же момент на валу сменит направление и пойдет вращать навстречу движку, то мотор сразу же выйдет на генерацию (IV участок).
Характеристика 2 это то же самое, только с обратной полярностью питающего напряжения двигателя.
А характеристика 3 это динамическое торможение. Оно же реостатное. Т.е. когда мы берем и просто коротим наш двигатель на резистор или сам на себя. Можете сами проверить, возьмите любой моторчик и покрутите его, а потом закоротите ему якорь и покрутите снова. На валу будет ощутимое усилие, тем больше, чем качественнее движок.
Кстати, драйвера двигателей вроде L293 или L297 имеют возможность включить реостатное торможение, подачей обоих ключей вверх или вниз. При этом якорь коротится через драйвер на шину земли или питания.
▌Бесколлекторные двигатели постоянного тока
Коллекторный движок он очень хорош. Он чертовски легко и гибко регулируется. Можно повышать обороты, понижать, механическая характеристика жесткая, момент он держит на ура. Зависимость прямая. Ну сказка, а не мотор. Если бы не одна ложка говна во всей этой вкусняшке — коллектор.
Это сложный, дорогой и очень ненадежный узел. Он искрит, создает помехи, забивается проводящей пылью от щеток. А при большой нагрузке может полыхнуть, образовав круговой огонь и тогда все, капец движку. Закоротит все дугой наглухо.
Но что такое коллектор вообще? Нафига он нужен? Выше я говорил, что коллектор это механический инвертор. Его задача переключать напряжение якоря туда сюда, подставляя обмотку под поток.
А на дворе то уже 21 век и дешевые и мощные полупроводники сейчас на каждом шагу. Так зачем нам нужен механический инвертор если мы можем сделать его электронным? Правильно, незачем! Так что берем и заменяем коллектор силовыми ключами, а еще добавляем датчики положения ротора, чтобы знать в какой момент переключать обмотки.
А для пущего удобства выворачиваем двигатель наизнанку — гораздо проще вращать магнит или простенькую обмотку возбуждения, чем якорь со всей этой тряхомудией на борту. В качестве ротора тут выступает либо мощный постоянный магнит, либо обмотка питаемая с контактных колец. Что хоть и смахивает на коллектор, но не в пример надежней его.
И получаем что? Правильно! Бесщеточный двигатель постоянного тока aka BLDC. Все те же няшные и удобные характеристики ДПТ, но без этого мерзкого коллектора. И не надо путать BLDC с синхронными двигателями. Это совсем разные машины и разным принципом действия и управления, хотя конструктивно они ОЧЕНЬ схожи и тот же синхронник вполне может работать как BLDC, добавить ему только датчиков да систему управления. Но это уже совсем другая история.