Устройство и принцип действия асинхронных электродвигателей
Всем привет. Рад вас видеть у себя на сайте. Тема сегодняшней статьи: устройство и принцип действия асинхронных электродвигателей. Так же я бы хотел немного сказать о способах регулировки их частоты вращения, и перечислить их основные преимущества и недостатки.
Раньше, я уже писал статьи, касающиеся асинхронных электродвигателей. Если кому интересно, то можете почитать. Вот список:
Схема пуска асинхронного двигателя.
Расчёт тока электродвигателя.
Реверсивное управление асинхронным электродвигателем с короткозамкнутым ротором.
Ну а теперь давайте перейдём к теме сегодняшней статьи.
В нынешнее время, очень трудно представить, как бы существовали все промышленные предприятия, если бы не было асинхронных машин. Эти двигателя установлены практически везде. Даже дома у каждого человека есть такой двигатель. Он может стоять на вашей стиральной машинке, на вентиляторе, на насосной станции, в вытяжке и так далее.
Вообще асинхронный электродвигатель – это колоссальный прорыв в мировой промышленности. Во всём мире их выпускают более 90 процентов от количества всех выпускаемых двигателей.
Асинхронный электродвигатель – это электрическая машина, которая преобразовывает электрическую энергию в механическую. То есть потребляет электрический ток, а взамен дают крутящий момент, с помощью которого можно вращать многие агрегаты.
А само слово «асинхронный» — означает неодновременных или не совпадающий по времени. Потому что у таких двигателей частота вращения ротора немного отстаёт от частоты вращения электромагнитного поля статора. Ещё это отставанием называют – скольжением.
Обозначается это скольжение буквой: S
А вычисляется скольжение по такой формуле: S = ( n1 — n2 )/ n1 — 100%
Где, n1 – это синхронная частота магнитного поля статора;
n2 – это частота вращения вала.
Устройство асинхронного электродвигателя.
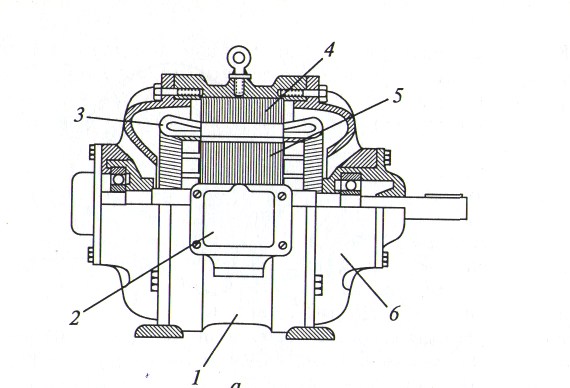
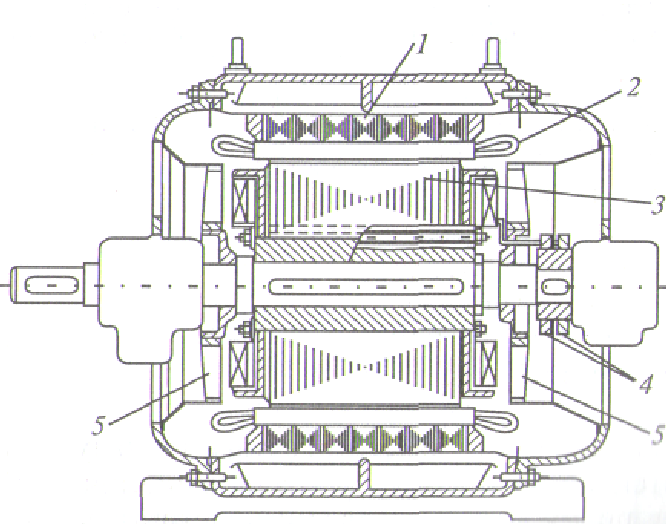
Двигатель состоит из таких частей:
1. Статор с обмотками. Или станина внутри которой находится статор с обмотками.
2. Ротор. Это если короткозамкнутый. А если фазный, то можно сказать, что это якорь или даже коллектор. Я думаю, ошибки не будет.
3. Подшипниковые щиты. На мощных двигателях ещё спереди стоят подшипниковые крышки с уплотнителями.
4. Подшипники. Могут стоять скольжения или качения, в зависимости от исполнения.
5. Вентилятор охлаждения. Изготавливается из пластмассы или металла.
6. Кожух вентилятора. Имеет прорези для подачи воздуха.
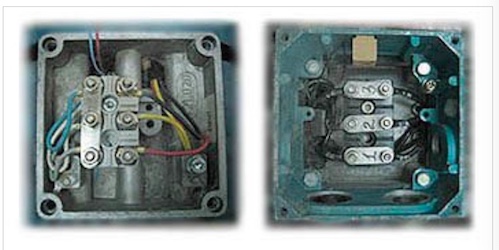
7. Борно или клеммная коробка. Для подключения кабелей.
Это все его основные детали, но в зависимости от вида, типа и исполнения может немного изменяться.
Асинхронные электродвигателя в основном выпускают двух видов: трёхфазные и однофазные. В свою очередь трёхфазные ещё подразделяются на подвиды: с короткозамкнутым ротором или фазным ротором.
Самые распространённые – это трёхфазные с короткозамкнутым ротор.
Статор имеет круглую форму и набирается с листов специальной стали, которые изолированы между собой, и эта собранная конструкция образует сердечник с пазами. В пазы сердечника укладываются обмотки, со специального обмоточного, изолированного лаком провода. Провод это отливают в основном из меди, но также есть и с алюминия. Если двигатель очень мощный, то обмотки делаю шиной. Обмотки укладывают так, чтобы они были сдвинуты относительно друг друга на 120 градусов. Соединяются обмотки статора в звезду или в треугольник.
Ротор, как выше я уже писал выше, бывает короткозамкнутый или фазный.
Короткозамкнутый представляет собой вал, на который надеваются листы, из тоже специальной, стали. Эти наборные листы образую сердечник, в пазы которого заливают расплавленный алюминий. Этот алюминий равномерно растекается по пазам и образует стержни. А по краям эти стержни замыкают алюминиевыми кольцами. Получается своего рода «беличья клетка».
Фазный ротор представляет собой вал с сердечником и тремя обмотками. Одни концы, которых обычно соединяют в звезду, а вторые три конца присоединяют к токосъемным кольцам. А на эти кольца, с помощью щёток подают электрический ток.
Если в цепь фазных обмоток добавить нагрузочный реостат, и при пуске двигателя увеличивать активное сопротивление, то таким способ можно уменьшить большие пусковые токи.
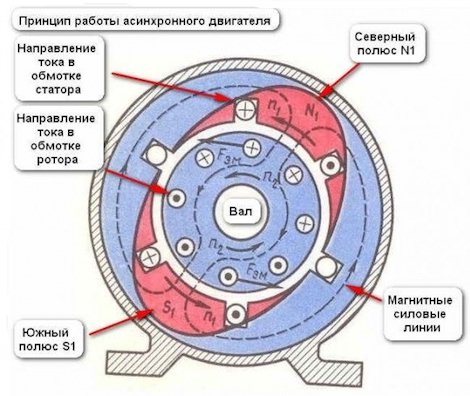
Принцип действия.
Когда на обмотки статора подаются электрический ток, то в этих обмотках возникает электрический поток. Как вы помните, из выше написанных слов, фазы у нас смещены относительно друг друга на 120 градусов. И вот этот поток в обмотках начинает вращаться.
И при вращении магнитного потока статора, в обмотках ротора появляется электрический ток, и своё магнитное поле. Два этих магнитных поля начинают взаимодействовать и заставляют вращаться ротор электродвигателя. Это если ротор короткозамкнутый.
По принципу роботы вот посмотрите видео ролик.
Ну а с фазным ротором, по сути, принцип тот же. Напряжение подаётся на статор и на ротор. Появляются два магнитных поля, которые начинают взаимодействовать и вращать ротор.
Достоинства и недостатки асинхронных двигателей.
Основные достоинства асинхронного электродвигателя с короткозамкнутым ротором:
2. Цена намного меньше по сравнению с другими двигателями.
3. Очень простая схема запуска.
4. Скорость вращения вала практически не меняется с увеличением нагрузки.
5. Хорошо переносит кратковременные перегрузы.
6. Возможность подключения трёхфазных двигателей в однофазную сеть.
7. Надёжность и возможность эксплуатировать практически в любых условиях.
8. Имеет очень высокий показатель КПД и cos φ.
Недостатки:
1. Не возможности контролировать частоту вращения ротора без потери мощности.
2. Если увеличить нагрузку, то уменьшается момент.
4. При недогрузе увеличивается показатель cos φ
5. Высокие показатели пусковых токов.
Достоинства двигателей с фазным ротором:
1. По сравнению с короткозамкнутыми двигателями, имеет достаточно большой вращающий момент. Что позволяет его запускать под нагрузкой.
2. Может работать с небольшим перегрузом, и при этом частота вращения вала практически не меняется.
3. Небольшой пусковой ток.
4. Можно применять автоматические пусковые устройства.
Недостатки:
1. Большие габариты.
2. Показатели КПД и cos φ меньше, чем у двигателей с короткозамкнутым ротором. И при недогрузе эти показатели имеют минимальное значение
3. Нужно обслуживать щёточный механизм.
На этом буду заканчивать свою статью. Если она была вам полезной, то поделитесь нею со своими друзьями в социальных сетях. Если есть вопросы, то задавайте их в комментариях и подписывайтесь на обновления. Пока.
С уважением Александр!
Читайте также статьи:
Асинхронный двигатель: конструкция, применение, принцип работы
Содержание:
- Где применяются
- Устройство асинхронного двигателя
- Принцип работы
- Что такое скольжение
- Видео
Среди устройств, преобразующих электрическую энергию в механическую, несомненным лидером является трехфазный асинхронный двигатель – простой и надежный в эксплуатации агрегат. Благодаря своим качествам, он получил широкое применение в промышленности и других областях, где используются механизмы. Название двигателя связано с основным принципом его работы. У этих устройств магнитное поле статора вращается с частотой, превышающей частоту вращения ротора. Работа агрегата осуществляется от сети переменного тока.
Где применяются
Асинхронные двигатели активно используются во многих отраслях промышленности и сельского хозяйства. Они потребляют примерно 70% всей энергии, предназначенной для преобразования электричества во вращательное или поступательное движение. Асинхронные двигатели зарекомендовали себя наиболее эффективными в качестве электрической тяги, без которой не обходятся многие технологические операции.

Асинхронные двигатели обладают множеством положительных качеств. Простая конструкция позволяет изготавливать наиболее дешевые и надежные устройства. Минимальные расходы по эксплуатации обеспечиваются отсутствием скользящего узла токосъема, что одновременно повышает и надежность агрегата.
Данный тип электродвигателей может быть трехфазным или однофазным, в зависимости от количества питающих фаз. В случае необходимости и при соблюдении определенных условий, трехфазный агрегат может питаться и работать от однофазной сети. Эти устройства применяются не только в промышленности, но и в бытовых условиях, а также на садовых участках или домашних мастерских. Однофазные двигатели обеспечивают работу и вращение вентиляторов, стиральных машин, небольших станков, водяных насосов и электроинструмента.
Для нормального действия асинхронного агрегата необходимо выбирать наиболее рациональную схему управления. Трехфазный двигатель будет работать в однофазном режиме при условии правильного расчета конденсаторов, выбора типа и сечения проводов, аппаратуры защиты и управления.
Устройство асинхронного двигателя
Понятие асинхронный означает не совпадающий по времени, неодновременный. В связи с этим, ротор такого двигателя вращается с частотой, меньшей чем частота вращения электромагнитного поля статора.

Подобное отставание называется скольжением и обозначается символом S в формуле, применяемой для расчетов:
- S = (n1 – n2)/n1 – 100%, где n1 является синхронной частотой магнитного поля статора, а n2 – частотой вращения вала.
Конструктивно, стандартный асинхронный электродвигатель включает в себя следующие элементы и детали:
- Статор с обмотками. Эту функцию также может выполнять станина, внутри которой помещается статор с обмотками.
- Короткозамкнутый ротор. Если используется фазный – он может называться якорем или коллектором.
- Подшипники различного типа – качения или скольжения. На двигателях повышенной мощности в передней части установлены крышки для подшипников с уплотнениями.
- Металлический или пластмассовый охлаждающий вентилятор, помещенный в кожух с прорезями для подачи воздуха.
- Подключение кабелей осуществляется с помощью клеммной коробки.
Данные конструктивные элементы могут незначительно изменяться, в зависимости от модификации электродвигателя.
Как уже отмечалось, асинхронные двигатели бывают трехфазными или однофазными. Первый вариант, в свою очередь, выпускается с короткозамкнутым или фазным ротором. Наибольшее распространение получили трехфазные асинхронные электродвигатели с короткозамкнутым ротором, поэтому их следует рассмотреть более подробно.

Статор обладает круглой формой и собирается из специальных стальных листов, изолированных между собой. В результате, конструктивно образуется сердечник с пазами, в которые укладываются обмотки. Для этих целей используется обмоточный медный провод, изолированный лаком. В мощных агрегатах обмотки делаются в виде шины. При укладке они сдвигаются между собой на 120 градусов. Соединение осуществляется по схеме звезды или треугольника.
Конструкция самого короткозамкнутого ротора изготавливается в виде вала с надетыми на него стальными листами. Этот набор листов образует сердечник с пазами, заливаемые расплавленным алюминием. Равномерно растекаясь по пазам, алюминий образует стержни, края которых замыкают алюминиевые кольца.
Фазный ротор состоит из вала с сердечником и трех обмоток. С одного конца они соединяются звездой, а с другого – соединяются с токосъемными кольцами, на которые с помощью щеток подается электрический ток. Во время запуска образуется большой пусковой ток асинхронного двигателя. Его можно уменьшить путем добавления к фазным обмоткам нагрузочного реостата.
Принцип работы
Устройство и конструктивные особенности асинхронного двигателя определяют и принцип действия данного агрегата. Когда на обмотку статора подается напряжение, в ней образуется магнитное поле. Такая подача напряжения приводит к изменениям магнитного потока и всего магнитного поля статора. Измененные магнитные потоки поступают к ротору, приводят его в действие, после чего он начинает вращаться. Для того чтобы статор и ротор работали асинхронно, требуется, чтобы значения напряжения и магнитного потока были равны переменному току, используемому в качестве источника питания.
Сам двигатель работает следующим образом:
- Вращающееся магнитное поле воздействует на короткозамкнутую обмотку, специально приспособленную для вращения.
- Поле пересекает проводники роторной обмотки, индуктируя в них электродвижущую силу.
- Под воздействием силы в проводниках ротора начнется течение электрического тока, взаимодействующего с вращающимся магнитным полем. Это приводит к появлению электромагнитных сил, воздействующих на обмотку ротора.
- В сумме, действия приложенных сил вызывают появление вращающего момента, приводящего во вращение ротор в направлении магнитного поля.
Величина индуктированной ЭДС зависит от частоты пересечения проводников вращающимся магнитным полем. То есть, чем выше разница между n1 и n2, тем больше будет величина ЭДС. Ротор будет вращаться с частотой n2, которая всегда будет отставать от синхронной частоты поля статора n1. Эта разница между обеими частотами и будет частотой скольжения ∆n= n1- n2. Данное неравенство является необходимым условием появления электромагнитного вращающегося момента в асинхронном двигателе. Поэтому агрегат так и называется, поскольку вращение ротора происходит несинхронно с полем статора.
Что такое скольжение
Понятие скольжения представляет собой отношение частоты вращения к частоте поля. Данная величина S берется в процентном отношении от частоты вращения магнитного поля. В соответствии с формулой, рассмотренной ранее, частота вращения ротора, определяемая с помощью скольжения составит: n2 = n1 x (1 – S).
Ротор асинхронного двигателя вращается в том же направлении, что и его магнитное поле. В свою очередь, направление вращения поля зависит от последовательности фаз трехфазной сети. Изменить направление вращения ротора возможно за счет изменения направления вращения поля, создаваемого статором. В этом случае изменяется порядок поступления импульсов тока к отдельным обмоткам. В случае необходимости может быть задано вращение по часовой или против часовой стрелки.
Важным моментом считается пуск асинхронного двигателя, при котором происходит пересечение обмотки ротора вращающимся магнитным полем. В результате, индуктируется большая ЭДС, создающая высокий пусковой ток. Подобное состояние компенсируется специальной нагрузкой, снижающей скорость вращения ротора.
Принцип работы трёхфазного асинхронного двигателя
Наиболее распространённым в промышленности типом двигателя переменного тока является трёхфазный асинхронный двигатель, изобретённый в 1888г. М. О. Доливо-Добровольским.
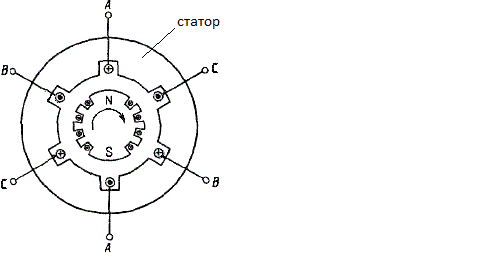
Рис. 43. Трёхфазный асинхронный двигатель
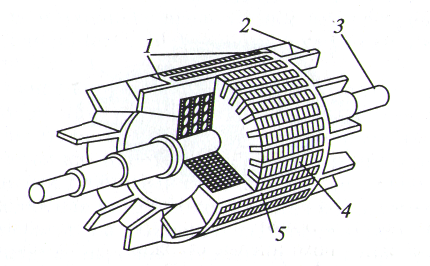
В пазах статора размещены три катушки, плоскости которых смещены одна относительно другой на 120°. Катушки соединены звездой. При подключении трёхфазной системы ЭДС к зажимам А, В, С в статоре возникает круговое вращающееся магнитное поле. В пазах ротора находятся три замкнутые на себя или на внешние сопротивления катушки (рис. 43).
Круговое вращающееся магнитное поле с угловой скоростью ω пересекает провода катушек неподвижного ротора и наводит в них ЭДС, и в катушках ротора потекут токи. По закону Ленца эти токи стремятся своим магнитным полем ослабить вызывающее их магнитное поле.
Механическое взаимодействие токов ротора с вращающимся магнитным полем приведёт к тому, что ротор начнёт вращаться в ту же сторону, что и магнитное поле (правило левой руки).
Ротор вращается асинхронно, т.е. частота вращения его ωрменьше частоты вращения магнитного поля ω. Отсюда и название двигателя асинхронный.
Разность частот вращения поля и ротора отнесённая к скорости поля, называется скольжением:
 (132)
(132)
Скольжение не может быть равно нулю, так как при одинаковых частотах вращения поля и ротора прекратилось бы наведение токов в роторе и, следовательно, отсутствовал бы вращающийся момент.
В рабочем режиме асинхронный двигатель находится в динамическом равновесии, когда создаваемый благодаря скольжению вращающий момент уравновешивает тормозящий момент нагрузки на его валу. С увеличением механической нагрузки тормозящий момент становится больше вращающего и скольжение увеличивается. Вследствие этого возрастают индуктированные в обмотке ротора ЭДС и токи, что вызывает увеличение вращающегося момента до нового состояния динамического равновесия (при большем скольжении).
Однако вращающий момент может расти с увеличением скольжения только до определённого предела, так называемого критического значения при критическом скольжении, после чего он падает, а двигатель затормаживается. В этот момент должна сработать максимальная токовая защита, иначе двигатель сгорит.
При нормальной нагрузке скольжение асинхронных двигателей в среднем составляет 2 – 4 %.
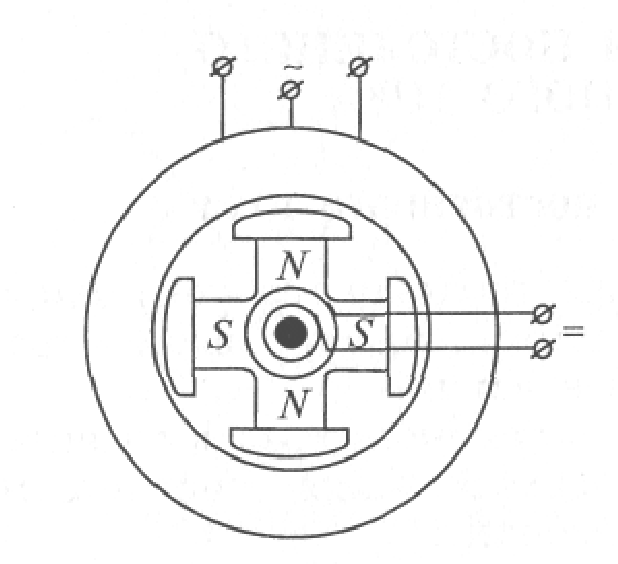
Принцип работы трёхфазного синхронного двигателя
Трёхфазный синхронный генератор, как и многие другие типы электрических машин, обладает свойством обратимости: он может работать как синхронный двигатель. Поэтому конструктивно синхронный двигатель мело отличается от синхронного генератора.
Если присоединить обмотку статора к трёхфазной системе ЭДС, а обмотку возбуждения ротора – к источнику постоянного тока, то вращающееся магнитное поле статора будет периодически создавать на валу моменты разных знаков. Поэтому ротор не сможет прийти во вращение – он будет вибрировать.
Для пуска двигателя необходимо сначала (при разомкнутой обмотке ротора) привести ротор во вращение от внешнего двигателя до частоты вращения, близкой к частоте вращения поля. Если после этого включить обмотку возбуждения ротора, то двигатель «втянется в синхронизм». Ротор будет вращаться синхронно с полем статора.
Ротор представляет собой электромагнит
постоянного тока с явно выраженными
полюсами. При втягивании в синхронизм
ось поля ротора стремиться совпасть с
результирующим вектором магнитной
индукции  .
.
Для пуска синхронного двигателя может быть использована специальная пусковая обмотка, действующая так же, как в асинхронном двигателе.
При строго синхронном вращении ротора имеется угловой сдвиг между осями полей статора и ротора, зависящий от нагрузки (от момента сопротивления на валу). С увеличением нагрузки этот угол увеличивается, благодаря чему момент вращения так же увеличивается. Максимальный вращающий момент получается при угле между ЭДС двигателя и напряжением сети около 90°, после чего дальнейшее увеличение нагрузки приводит к остановке двигателя и «выпадению» его из синхронизма.
Если изменять постоянный ток в цепи возбуждения ротора, то можно в широких пределах регулировать cosϕ двигателя. Так, при «недовозбуждённом» двигателе уголϕ положительный, т.е. ток отстаёт от напряжения, а при «перевозбуждённом» двигателе уголϕ отрицательный – ток опережает напряжение. Это свойство синхронных двигателей весьма ценно и широко используется в промышленности для повышенияcosϕэлектроустановок.
Синхронные двигатели выполняются обычно для номинальных режимов работы про cos= 1 иcos= 0,8 (опережающем).
Принцип работы электродвигателя. Простыми словами о сложном
Принцип работы электродвигателя основывается на эффекте обнаруженном Майклом Фарадеем еще в 1821 году. Он сделал открытие, что при взаимодействии электрического тока в проводнике и магнита, может возникнуть непрерывное вращение.

Принцип работы электродвигателя постоянного тока
Если в однородном магнитном поле расположить в вертикальном положении рамку и пропустить по ней ток, тогда вокруг проводника возникнет электромагнитное поле, которое будет взаимодействовать с полюсами магнитов. От одного рамка будет отталкиваться, а к другому притягиваться. В результате рамка повернется в горизонтальное положение, в котором будет нулевым воздействие магнитного поля на проводник. Для того что бы вращение продолжилось необходимо добавить еще одну рамку под углом или изменить направление тока в рамке в подходящий момент. На рисунке выше это делается при помощи двух полуколец, к которым примыкают контактные пластины от батарейки. В результате после совершения полуоборота меняется полярность и вращение продолжается.
В современных электродвигателях вместо постоянных магнитов для создания магнитного поля используются катушки индуктивности или электромагниты. Если разобрать любой мотор, то Вы увидите намотанные витки проволоки, покрытой изоляционным лаком. Эти витки и есть электромагнит или как их еще называют обмотка возбуждения.
Простыми словами о сложном
На самом деле там векторное произведение, дифференциалы и т.п. но это детали, а у нас упрощённый случай. И так…

Рис. 1 Основа работы электрического двигателя
Направление силы ампера определяется правилом левой руки.

Рис. 2 Правило левой руки
Мысленно ставим левую ладонь на верхний рисунок и получаем направление сил Ампера. Она типа растягивают рамку с током в том положении как нарисовано на рис.1. И никуда вертеться тут ничего не будет, рамка в равновесии, устойчивом.
А если рамка с током повернута по-другому, то вот что будет:

Рис. 3 Рамка
Здесь уже равновесия нет, сила Ампера разворачивает противоположные стенки так, что рамка начинает вращаться. Появляется механическое вращение. Это основа электрического двигателя, самая суть, дальше только детали.
Далее.
Теперь что будет делать рамка с током на рис.3?. Если система идеальная, без трения, то очевидно будут колебания. Если трение присутствует, то колебания постепенно затухнут, рамка с током стабилизируется и станет как на рис.1.
Но нам нужно постоянное вращение и достичь его можно двумя принципиально разными способами и отсюда и возникает разница между двигателями постоянного и переменного трёхфазного тока.
Принцип работы электродвигателя постоянного тока
Способ 1. Смена направления тока в рамке.
Этот способ используется в двигателях постоянного тока и его потомках.
Наблюдаем за картинками. Пусть наш двигатель обесточен и рамка с током ориентирована как-то хаотично, вот так например:

Рис. 4.1 Случайно расположенная рамка
На случайно расположенную рамку действует сила Ампера и она начинает вращаться.

Рис. 4.2
В процессе движения рамка достигает угла 90°. Момент (момент пары сил или вращательный момент) максимальный.
 максимальный")
Рис. 4.3
И вот рамка достигает положения, когда момента вращения нет. И если сейчас не отключить ток, то сила Ампера будет уже тормозить рамку и в конце полуоборота рамка остановится и начнёт вращение в противоположном направлении. Но нам ведь этого не надо.
Поэтому мы на рис.3 делаем хитрый ход – меняем направление тока в рамке.

Рис. 4.4
И вот после пересечения этого положения, рамка с поменянным направлением тока уже не тормозится, а снова разгоняется.

Рис. 4.5
А когда рамка подходит к следующему положению равновесия, мы меняем ток ещё раз.

Рис. 4.6
И рамка опять продолжает ускоряться куда нам надо.
Вот так и получается постоянное вращение. Красиво? Красиво. Нужно только менять направление тока два раза за оборот и всего делов.
А делает это, т.е. обеспечивает смену тока специальный узел – щёточно-коллекторный узел. Принципиально он устроен так:

Рис. 5
Рисунок понятен и без пояснений. Рамка трётся то об один контакт, то об другой и так вот ток и меняется.
Очень важная особенность щёточно-коллекторного узла – его малый ресурс. Из-за трения. Например, вот движок ДПР-52-Н1 – минимальная наработка 1000 часов. В то же время срок службы современных бесколлекторных двигателей более 10000 часов, а двигателей переменного тока (там тоже нет ЩКУ) более 40000 часов.
Принцип работы электродвигателя переменного тока
Способ 2. Вращается магнитный поток, т.е. магнитное поле.
Вращающееся магнитное поле получают с помощью переменного трёхфазного тока. Вот есть статор.

Рис. 6 Статор электродвигателя
А есть значит 3 фазы переменного тока.

Рис. 7
Между ними как видно на Рис. 7 120 градусов, электрических градусов.
Эти три фазы укладывают в статор специальным образом, чтобы они геометрически были повернуты друг к дружке на 120°.

Рис. 8
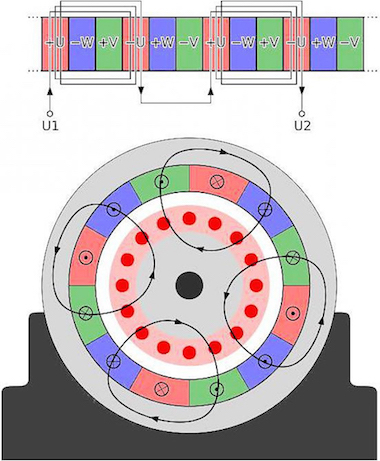
И тогда при подаче трёхфазного питания получается само собой за счёт складывания магнитных потоков от трёх обмоток вращающееся магнитное поле.

Рис. 9 Вращающееся магнитное поле
Далее вращающееся магнитное поле влияет силой Ампера на нашу рамку и она вращается.
Но здесь есть тоже различия, два разных способа.
Способ 2а. Рамка запитывается (синхронный двигатель).
Подаём значит на рамку напряжение (постоянное), рамка выставляется по магнитному полю. Помните рис.1 из самого начала? Вот так рамка и становится.

Рис. 10 (Рис.1)
Но поле магнитное у нас тут вращается, а не просто так висит. Рамка чего будет делать? Тоже будет вращаться, следуя за магнитным полем.
Они (рамка и поле) вращаются с одинаковой частотой, или синхронно, поэтому такие двигатели называются синхронными двигателями.
Способ 2б. Рамка не запитывается (асинхронный двигатель).
Фишка в том, что рамка не запитывается, совсем не запитывается. Просто проволока такая замкнутая.
Когда мы начинаем вращать магнитное поле, по законам электромагнетизма в рамке наводится ток. От этого тока и магнитного поля получается сила Ампера. Но сила Ампера будет возникать только если рамка движется относительно магнитного поля (известная история с опытами Ампера и его походами в соседнюю комнату).
Так что рамка всегда будет отставать от магнитного поля. А то, если она его вдруг почему-то догонит, то пропадёт наводка от поля, пропадёт ток, пропадёт сила Ампера и всё вообще пропадёт. То есть, в асинхронном двигателе рамка всегда отстаёт от поля и частота у них значит разная, то есть вращаются они асинхронно, поэтому и двигатель называется асинхронным.
Смотрите также по этой теме:
Как работает электродвигатель. Преимущества и недостатки разных видов.
Асинхронный двигатель. Устройство и принцип работы.
Будем рады, если подпишетесь на наш Блог!
[wysija_form id=»1″]
Синхронный электродвигатель: характеристики, устройство и принцип действия
Синхронный электродвигатель – это устройство, преобразующее электрическую энергию в механическую. Его также можно использовать в качестве генератора. Чаще всего он применяется в компрессорах, прокатных станках, поршневых насосах и другом подобном оборудовании. Рассмотрим принцип действия синхронного электродвигателя, его характеристики и свойства.
Устройство синхронного электродвигателя
Строение агрегата данного вида типично. Двигатель состоит из:
- Неподвижной части (якорь или статор).
- Подвижной части (ротор или индуктор).
- Вентилятора.
- Контактных колец.
- Щеток.
- Возбудителя.
Статор представляет собой сердечник, состоящий из обмоток, который заключен в корпус. Индуктор комплектуется электромагнитами постоянного тока (полюсами). Конструкция индуктора может быть двух видов – явнополюсная и неявнополюсная. В статоре и роторе расположены ферромагнитные сердечники, изготовленные из специальной электротехнической стали. Они необходимы для уменьшения магнитного сопротивления и улучшения прохождения магнитного потока.
Частота вращения ротора в синхронном двигателе равна частоте вращения магнитного поля. Независимо от подключаемой нагрузки частота ротора неизменна, так как число пар полюсов магнитного поля и ротора совпадают. Их взаимодействие обеспечивает постоянную угловую скорость, не зависящую от момента, приложенного к валу.
Принцип работы синхронного электродвигателя
Самые распространенные типы такого рода агрегатов – однофазный и трехфазный. Принцип работы синхронного электродвигателя в обоих случаях примерно одинаков. После подключения обмотки якоря к сети ротор остается неподвижным, в то время как постоянный ток поступает в обмотку возбуждения. Направление электромагнитного момента меняется дважды за время одного изменения напряжения. При значении среднего момента равном нулю, ротор под влиянием внешнего момента (механического воздействия) разгоняется до частоты, близкой по значению частоте вращения магнитного поля в зазоре, после чего двигатель переходит в синхронный режим.
В трехфазном устройстве проводники расположены под определенным углом относительно друг друга. В них возбуждается вращающееся с синхронной скоростью электромагнитное поле.
Разгон двигателя может осуществляться в двух режимах:
- Асинхронный. Обмотки индуктора замыкаются с помощью реостата. Вращающееся магнитное поле, возникающее при включении напряжения, пересекает короткозамкнутую обмотку, установленную на роторе. В ней индуцируются токи, взаимодействующие с вращающимся полем статора. По достижении синхронной скорости крутящий момент начинает уменьшаться и сводится к нулю после замыкания магнитного поля.
- С помощью вспомогательного двигателя. Для этого синхронный двигатель механически соединяется со вспомогательным (двигателем постоянного тока либо трехфазным индукционным двигателем). Постоянный ток подается только после того, как вращение двигателя достигает скорости, близкой к синхронной. Магнитное поле замыкается, и связь со вспомогательным двигателем прекращается.
Характеристики синхронного электродвигателя
Хотя асинхронные двигатели считаются более надежными и дешевыми, их синхронные «собратья» имеют некоторые преимущества и широко применяются в различных областях промышленности. К отличительным характеристикам синхронного электродвигателя можно отнести:
- Работу при высоком значении коэффициента мощности.
- Высокий КПД по сравнению с асинхронным устройством той же мощности.
- Сохранение нагрузочной способности даже при снижении напряжения в сети.
- Неизменность частоты вращения независимо от механической нагрузки на валу.
- Экономичность.
Синхронным двигателям также присущи некоторые недостатки:
- Достаточно сложная конструкция, делающая их производство дороже.
- Необходимость источника постоянного тока (возбудителя или выпрямителя).
- Сложность пуска.
- Необходимость корректировать угловую частоту вращения путем изменения частоты питающего напряжения.
Однако в некоторых случаях использование синхронных двигателей предпочтительнее:
- Для улучшения коэффициента мощности.
- В длительных технологических процессах, где нет необходимости в частых запусках и остановках.
Таким образом, «плюсы» двигателей такого типа значительно превосходят «минусы», поэтому на данный момент они высоко востребованы.
Изучив синхронный двигатель, устройство и принцип его действия и учтя условия, в которых он будет эксплуатироваться, вы сможете быстро и с легкостью подобрать оптимально подходящий для ваших целей тип агрегата (защищенный, закрытый, открытый) и использовать его с максимальной эффективностью.
Устройство и принцип работы электродвигателя переменного тока
Электродвигатель – это электротехническое устройство для преобразования электрической энергии в механическую. Сегодня повсеместно применяются электромоторы в промышленности для привода различных станков и механизмов. В домашнем хозяйстве они установлены в стиральной машине, холодильнике, соковыжималке, кухонном комбайне, вентиляторах, электробритвах и т. п. Электродвигатели приводят в движение, подключенные к ней устройства и механизмы.
В этой статье Я расскажу о самых распространенных видах и принципах работы электрических двигателей переменного тока, широко используемых в гараже, в домашнем хозяйстве или мастерской.
Как работает электродвигатель
Двигатель работает на основе эффекта, обнаруженного Майклом Фарадеем еще в 1821 году. Он сделал открытие, что при взаимодействии электрического тока в проводнике и магнита может возникнуть непрерывное вращение.
Если в однородном магнитном поле расположить в вертикальном положении рамку и пропустить по ней ток, тогда вокруг проводника возникнет электромагнитное поле, которое будет взаимодействовать с полюсами магнитов. От одного рамка будет отталкиваться, а к другому притягиваться. В результате рамка повернется в горизонтальное положения, в котором будет нулевым воздействие магнитного поля на проводник. Для того что бы вращение продолжилось необходимо добавить еще одну рамку под углом или изменить направление тока в рамке в подходящий момент. На рисунке это делается при помощи двух полуколец, к которым примыкают контактные пластины от батарейки. В результате после совершения полуоборота меняется полярность и вращение продолжается.
В современных электродвигателях вместо постоянных магнитов для создания магнитного поля используются катушки индуктивности или электромагниты. Если разобрать любой мотор, то Вы увидите намотанные витки проволоки, покрытой изоляционным лаком. Эти витки и есть электромагнит или как их еще называют обмотка возбуждения.
В быту же постоянные магниты используются в детских игрушках на батарейках.
В других же более мощных двигателях используются только электромагниты или обмотки. Вращающаяся часть с ними называется ротор, а неподвижная- статор.
Виды электродвигателей
Сегодня существуют довольно много электродвигателей разных конструкций и типов. Их можно разделить по типу электропитания:
- Переменного тока, работающие напрямую от электросети.
- Постоянного тока, которые работают от батареек, АКБ, блоков питания или других источников постоянного тока.
По принципу работы:
- Синхронные, в которых есть обмотки на роторе и щеточный механизм для подачи на них электрического тока.
- Асинхронные, самый простой и распространенный вид мотора. В них нет щеток и обмоток на роторе.
Синхронный мотор вращается синхронно с магнитным полем, которое его вращает, а у асинхронного ротор вращается медленнее вращающегося магнитного поля в статоре .
Принцип работы и устройство асинхронного электродвигателя
В корпусе асинхронного двигателя укладываются обмотки статора (для 380 Вольт их будет 3), которые создают вращающееся магнитное поле. Концы их для подключения выводятся на специальную клеммную колодку. Охлаждаются обмотки, благодаря вентилятору, установленному на вале в торце электродвигателя.
Ротор, являющиеся одним целым с валом, изготавливается из металлических стержней, которые замыкаются между собой с обоих сторон, поэтому он и называется короткозамкнутым.
Благодаря такой конструкции отпадает необходимость в частом периодическом обслуживании и замене токоподающих щеток, многократно увеличивается надежность, долговечность и безотказность.
Как правило, основной причиной поломки асинхронного мотора является износ подшипников, в которых вращается вал.
Принцип работы. Для того что бы работал асинхронный двигатель необходимо, что бы ротор вращался медленнее электромагнитного поля статора, в результате чего наводится ЭДС (возникает электроток) в роторе. Здесь важное условие, если бы ротор вращался с такой же скоростью как и магнитное поле, то в нем по закону электромагнитной индукции не наводилось бы ЭДС и, следовательно не было бы вращения. Но в реальности, из-за трения подшипников или нагрузки на вал, ротор всегда будет вращаться медленнее.
Магнитные полюса постоянно вращаются в обмотках мотора, и постоянно меняется направление тока в роторе. В один момент времени, например направление токов в обмотках статора и ротора изображено схематично в виде крестиков (ток течет от нас) и точек (ток на нас). Вращающееся магнитное поле изображено изображено пунктиром.
Например, как работает циркулярная пила. Наибольшие обороты у нее без нагрузки. Но как только мы начинаем резать доску, скорость вращения уменьшается и одновременно с этим ротор начинает медленнее вращаться относительно электромагнитного поля и в нем по законам электротехники начинает наводится еще большей величины ЭДС. Вырастает потребляемый ток мотором и он начинает работать на полной мощности. Если же нагрузка на вал будет столь велика, что его застопорит, то может возникнуть повреждение короткозамкнутого ротора из-за максимальной величины наводимой в нем ЭДС. Вот почему важно подбирать двигатель, подходящей мощности. Если же взять большей, то неоправданными будут энергозатраты.
Скорость вращения ротора зависит от количества полюсов. При 2 полюсах скорость вращения будет равна скорости вращения магнитного поля, равного максимум 3000 оборотов в секунду при частоте сети 50 Гц. Что бы понизить скорость вдвое, необходимо увеличить количество полюсов в статоре до четырех.
Весомым недостатком асинхронных двигателей является то, что они подаются регулировке скорости вращения вала только при помощи изменения частоты электрического тока. А так не возможно добиться постоянной частоты вращения вала.
Принцип работы и устройство синхронного электродвигателя переменного тока
Данный вид электродвигателя используется в быту там, где необходима постоянная скорость вращения, возможность ее регулировки, а так же если необходима скорость вращения более 3000 оборотов в минуту (это максимум для асинхронных).
Синхронные моторы устанавливаются в электроинструменте, пылесосе, стиральной машине и т. д.
В корпусе синхронного двигателя переменного тока расположены обмотки (3 на рисунке), которые также намотаны и на ротор или якорь (1). Их выводы припаяны к секторам токосъемного кольца или коллектора (5), на которые при помощи графитовых щеток (4) подается напряжение. При чем выводы расположены так, что щетки всегда подают напряжение только на одну пару.
Наиболее частыми поломками коллекторных двигателей является:
- Износ щеток или их плохой их контакт из-за ослабления прижимной пружины.
- Загрязнение коллектора. Чистите либо спиртом или нулевой наждачной бумагой.
- Износ подшипников.
Принцип работы. Вращающий момент в электромоторе создается в результате взаимодействия между током тока якоря и магнитным потоком в обмотке возбуждения. С изменением направления переменного тока будет меняться и направление магнитного потока одновременно в корпусе и якоре, благодаря чему вращение всегда будет в одну сторону.
Регулировка скорости вращения меняется методом изменения величины подаваемого напряжения. В дрелях и пылесосах для этого используется реостат или переменное сопротивление.
Изменение направления вращения происходит также как и у двигателей постоянного тока, о которых Я расскажу в следующей статье.
Самое главное о синхронных двигателях Я постарался изложить, более подробно Вы можете прочитать на них на Википедии.
Режимы работы электродвигателя в следующей статье.
6.3.4. Принцип действия и устройство электрических машин переменного тока
Как и машины постоянного тока, электрические машины переменного тока состоят из статора и ротора. По способу образования магнитного поля статора и ротора машины переменного тока делятся на две группы: асинхронные и синхронные. В основе работы асинхронных и синхронных машин лежит образование вращающегося магнитного поля.
Обмотки статора обычно присоединяются к сети переменного тока и создают вращающееся магнитное поле, поэтому устройство этой части асинхронных и синхронных машин получается одинаковым.
Получение вращающегося магнитного поля. В асинхронных и синхронных машинах вращающееся магнитное поле статора образуется при протекании трехфазного тока в трех обмотках, оси которых сдвинуты в пространстве на 120°/р, где р — число пар полюсов обмотки. При р = 1 получается двухполюсное вращающееся магнитное поле, образование которого можно пояснить с помощью рис. 6.27.
| |
а | б |
|
|
в | г |
|
|
д | е |
Рис. 6.27 | |
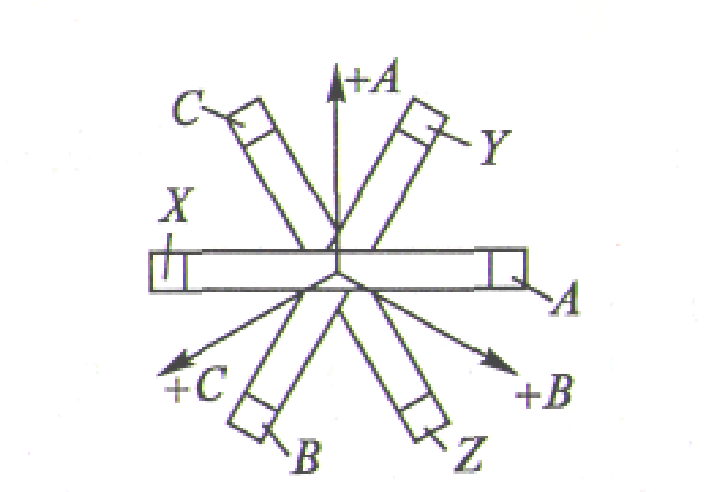
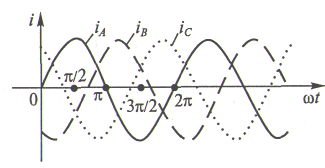
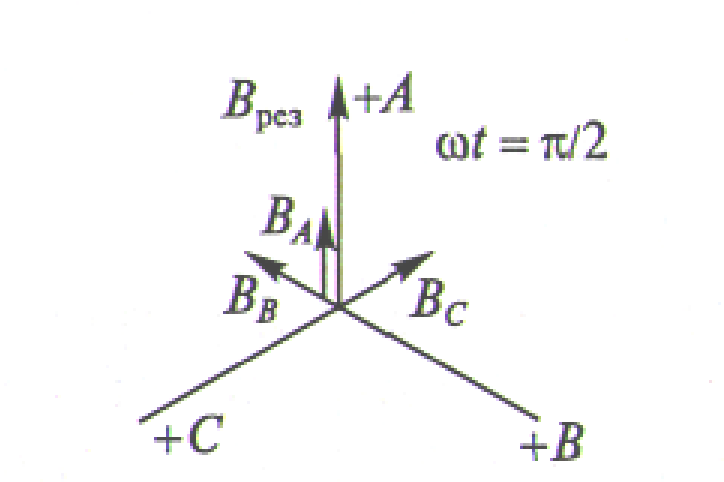
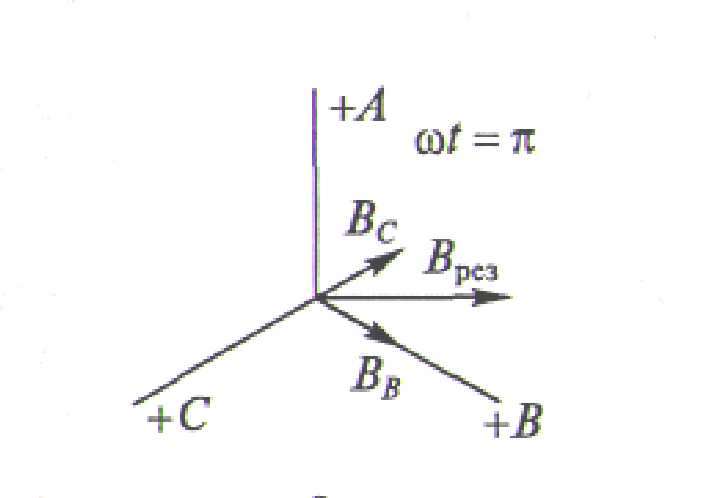
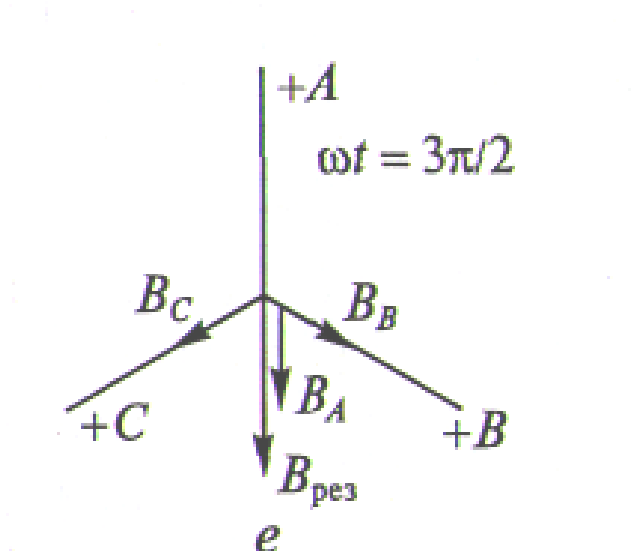
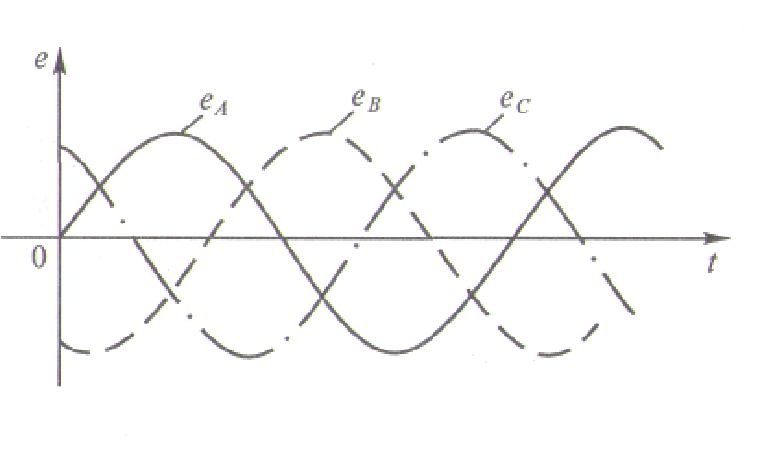
Расположим три одинаковые катушки AX, BY, CZ так, что их оси смещены на 120° по отношению друг к другу (рис. 6.27а). Присоединим катушки к симметричной трехфазной системе ЭДС. Пусть токи входят в начало катушек А, В, С и изменяются следующим образом:
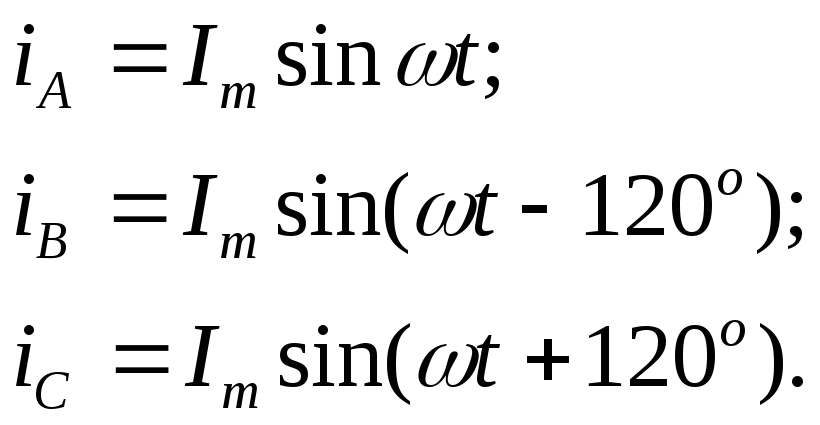
Графическое изменение этих токов во времени показано на рис. 6.27б.
Каждый из токов будет создавать пульсирующее поле, направленное вдоль оси своей катушки. Положительное направление магнитной индукции поля первой катушки в соответствии с правилом буравчика обозначим +А (ток направлен от начала катушки А к ее концу X), второй — +В, третьей — +С. Индукцию первой катушки обозначим ВА, второй – ВB, третьей — ВC.
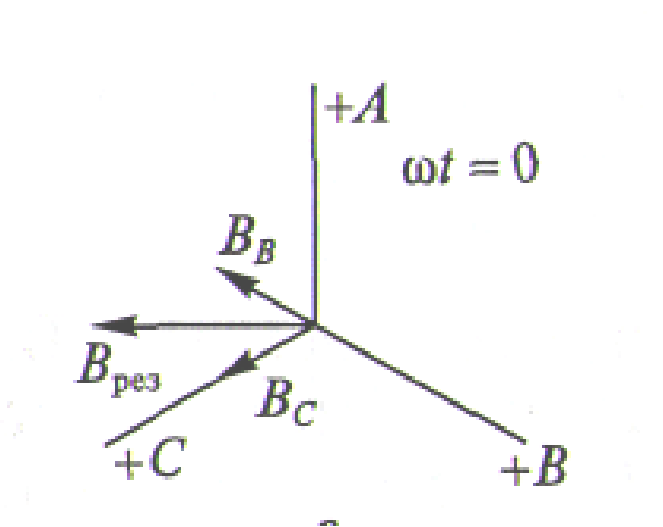
Изобразим
мгновенные значения ВА, ВB, ВС и
результирующую индукцию Врез для
моментов времени  (рис. 6.27в, г, д, е).
(рис. 6.27в, г, д, е).
Очевидно,
что с течением времени вектор результирующей
магнитной индукции, оставаясь по величине
неизменным, вращается в направлении от
начала первой катушки с током  к началу второй катушки с отстающим
током
к началу второй катушки с отстающим
током .
Если поменять токи двух любых катушек
местами, направление вращения поля
изменится на обратное.
.
Если поменять токи двух любых катушек
местами, направление вращения поля
изменится на обратное.
Таким
образом, полный оборот результирующий
вектор магнитной индукции двухполюсного
магнитного поля совершит за время,
равное периоду  переменного тока обмотки, т.е. частота
вращения двухполюсного магнитного поля
переменного тока обмотки, т.е. частота
вращения двухполюсного магнитного поля (об/мин), где
(об/мин), где — частота питающей сети.
— частота питающей сети.
Токи
в трехфазной обмотке могут возбуждать
не только двухполюсное, но и многополюсное
вращающееся магнитное поле. Для этого
количество катушек в фазе увеличивается
в число раз, равное требуемому числу
пар полюсов  магнитного поля, а размеры катушек
уменьшаются в такое же число раз.
магнитного поля, а размеры катушек
уменьшаются в такое же число раз.
Скорость вращения магнитного поля, образующего две пары полюсов, будет в два раза меньше, чем скорость вращения двухполюсного поля, так как за один период изменения токов полюсы поворачиваются на пространственный угол, равный 180о.
В общем случае
 (об/мин), (6.3)
(об/мин), (6.3)
где  —
число пар полюсов магнитного поля.
—
число пар полюсов магнитного поля.
Из выражения (6.3.) видно, что при принятой в нашей стране и многих других странах мира промышленной частоте 50 Гц частота вращения магнитных полей статора с трехфазной обмоткой при различном числе пар полюсов составит:
| 1 | 2 | 3 | 4 | 5 |
| 3000 | 1500 | 1000 | 750 | 600 |
Принцип действия и устройство асинхронного двигателя. Вращающееся поле статора пересекает проводники обмотки ротора и индуцирует в них ЭДС. При замкнутой обмотке ротора под действием ЭДС в обмотке возникают токи, направление которых определяется по правилу правой руки (рис. 6.28.). | |
Рис. 6.28 |
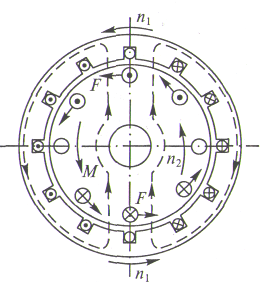
Взаимодействие
этих токов с полем статора создает
действующие на проводники электромагнитные
силы F,
направление
которых определяется по правилу левой
руки. Как видно из рис. 6.28, эти силы
стремятся повернуть ротор в направлении
вращения магнитного поля статора.
Совокупность сил F,
приложенных
к отдельным проводникам, создает на
роторе электромагнитный момент M,
приводящий
его в движение с частотой вращения  .
.
Относительную
разность  и
и принято
характеризовать безразмерной величиной,
называемой скольжением
принято
характеризовать безразмерной величиной,
называемой скольжением  .
Важнейшим
свойством асинхронной машины является
то, что при ее работе магнитное поле
статора и ротор перемещаются с разными
частотами вращения, не синхронно
(асинхронно), что и получило отражение
в наименовании этой машины.
.
Важнейшим
свойством асинхронной машины является
то, что при ее работе магнитное поле
статора и ротор перемещаются с разными
частотами вращения, не синхронно
(асинхронно), что и получило отражение
в наименовании этой машины.
Скольжение
асинхронного двигателя может изменяться
в пределах  .
При этом
.
При этом соответствует режиму холостого хода,
когда ротор не испытывает противодействующих
моментов, а
соответствует режиму холостого хода,
когда ротор не испытывает противодействующих
моментов, а соответствует неподвижному ротору(
соответствует неподвижному ротору( )
— режим короткого замыкания или пуска.
Обычно в номинальном режиме асинхронного
двигателя величина скольжения составляет
0,01…0,06.
)
— режим короткого замыкания или пуска.
Обычно в номинальном режиме асинхронного
двигателя величина скольжения составляет
0,01…0,06.
Как
и все электрические машины, асинхронные
двигатели обратимы, т. е. они могут
работать в режиме генератора, отдающего
энергию в трехфазную сеть. Для этого
внешними силами ротор необходимо
раскрутить до частоты вращения  ,
большей
чем
,
большей
чем  ,
при этом
,
при этом .
Токи обмотки ротора создают свое
собственное магнитное поле. Анализ
показывает, что независимо от частоты
вращения ротора, магнитное поле его
токов перемещается в пространстве с
той же частотой вращения
.
Токи обмотки ротора создают свое
собственное магнитное поле. Анализ
показывает, что независимо от частоты
вращения ротора, магнитное поле его
токов перемещается в пространстве с
той же частотой вращения ,
что
и магнитное поле статора, т.е. в любом
режиме асинхронной машины магнитные
поля статора и ротора взаимно неподвижны
друг относительно друга. Этим и
обеспечивается электромеханическое
преобразование энергии в асинхронной
машине.
,
что
и магнитное поле статора, т.е. в любом
режиме асинхронной машины магнитные
поля статора и ротора взаимно неподвижны
друг относительно друга. Этим и
обеспечивается электромеханическое
преобразование энергии в асинхронной
машине.
Рассмотренный принцип работы асинхронных машин определяет и их конструкцию, состоящую из статора и ротора. Статоры трехфазных асинхронных двигателей устроены одинаково, а роторы конструктивно отличаются друг от друга.
Основными частями статора являются корпус, сердечник и трехфазная обмотка. С корпусом прочно соединены два боковых подшипниковых щита с подшипниками, в которых вращается вал ротора.
Начала и концы фаз асинхронных машин состоят из пакета магнитопровода цилиндрической формы, набранного из стальных дисков с пазами, в которых располагаются обмотки. Пакет магнитопровода с обмоткой расположен на валу. Между пакетом ротора и пакетом сердечника статора имеется равномерный зазор.
Различают два типа обмоток ротора. Обмотки первого типа содержат медные или алюминиевые стержни, вставляемые или заливаемые в пазы ротора без изоляции. Эти стержни замыкаются накоротко по обоим торцам пакета ротора медными или алюминиевыми кольцами соответственно. Двигатель с ротором такого типа называют короткозамкнутым или с «беличьей клеткой» (рис. 6.29а). Ротор также называется короткозамкнутым (рис. 6.29б).
| |
а | б |
Рис. 6.29 | |
На рис. 6.29а обозначено: 1 — корпус статора; 2 — коробка выводов; 3 — обмотка статора; 4 — сердечник статора; 5 — ротор; 6 — подшипниковый щит.
На рис. 6.29б обозначено: 1 — замыкающие кольца; 2 вентиляционные лопасти; 3 — вал; 4 — пакет ротора; 5 — стержни обмотки.
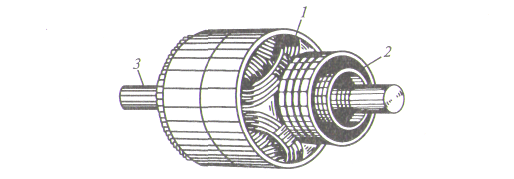
В пазы обмоток второго типа укладывается трехфазная обмотка, как и на статоре. Фазы обмотки соединяются звездой и три свободных ее конца присоединяются к трем изолированным контактным кольцам, насаженным на вал (рис. 6.30а).
|
а |
|
б |
Рис. 6.30 |
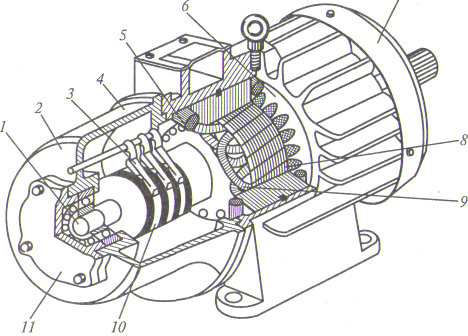
На рис. 6.30а обозначено: 1 — вал; 2 — подшипниковый щит; 3 — щеткодержатель; 4 — крышка люка; 5 — обмотка статора; 6 — сердечник статора; 7 — кожух вентилятора; 8 — сердечник ротора; 9 — обмотка ротора; 10 — контактные кольца; 11 — крышка подшипника.
На рис. 6.30б обозначено: 1 — обмотка; 2 — контактные кольца; 3 – вал.
На боковом подшипниковом щите укрепляется щеткодержатель, причем так, чтобы расположенные в нем три группы щеток надежно соприкасались с контактными кольцами ротора. Ротор с катушечной трехфазной обмоткой и контактными кольцами называют фазным (рис. 6.30б). Машины с контактными кольцами допускают подключение внешней цепи к цепи ротора для изменения характеристик двигателя в процессе управления.
Асинхронные двигатели являются самыми распространенными электрическими машинами в промышленности и сельском хозяйстве.
Принцип действия и устройство синхронных машин. Синхронной называется такая машина переменного тока, частота вращения ротора которой равна частоте вращения магнитного поля статора, определяемой выражением (6.3).
Ротор такой машины представляет электромагнит, возбуждаемый постоянным током. В синхронных машинах малой мощности вместо обмотки на роторе могут использоваться постоянные магниты.
В режиме генератора ротор синхронной машины приводится во вращение первичным двигателем с номинальной скоростью, которая поддерживается постоянной автоматическим регулятором. После этого генератор возбуждается подачей постоянного тока в обмотку ротора. Вращающийся с постоянной скоростью поток полюсов (рис. 6.31а), пересекая трехфазную обмотку статора, наводит в ней ЭДС, одинаковые по амплитуде и частоте, сдвинутые по фазе относительно друг друга на угол 120° (рис. 6.31б).
|
|
а | б |
Рис. 6.31 | |

На рис. 6.32 изображено устройство трехфазной синхронной машины.
|
Рис. 6.32 |
На рис. 6.33 обозначено: 1 – сердечник статора; 2 – трехфазная обмотка статора; 3 – полюсы ротора с обмоткой постоянного тока; 4 – кольца для соединения обмотки ротора с источником постоянного тока; 5 – вентиляторы.
По устройству ротора различают два типа синхронной машины: машина с явнополюсным ротором, в которой катушки обмотки постоянного тока размещены на выступающих полюсах (рис. 6.33а), и машина с неявнополюсным ротором, в котором распределенная обмотка постоянного тока уложена в пазы ротора (рис. 6.33б).
Явнополюсная синхронная машина изготовляется для скорости вращения до 1500 об/мин и используется в качестве генератора или двигателя. Наиболее крупные синхронные машины устанавливаются на гидроэлектростанциях и приводятся во вращение водяными турбинами со скоростью до 300 об/мин.
| |
а | б |
Рис. 6.33 | |
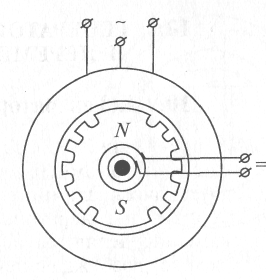
Неявнополюсная синхронная машина используется в основном как генератор на тепловых электростанциях и приводится во вращение паровой турбиной со скоростью обычно 3000 об/мин (при частоте 50 Гц).
ЭДС
в обмотках машин переменного тока. Вращающееся
магнитное поле статора
асинхронных и синхронных машин индуцирует
в фазных обмотках статора ЭДС,
пропорциональную магнитной индукции
магнитного потока Ф полюса вращающегося магнитного поля и
относительной скорости перемещения
проводника обмотки относительно поля.
Последняя пропорциональна частоте
вращения магнитного поля  и, следовательно,
частоте сети
и, следовательно,
частоте сети  (6.3), поэтому действующее значение ЭДС
фазы статора определяется по формуле
(6.3), поэтому действующее значение ЭДС
фазы статора определяется по формуле
 , (6.4)
, (6.4)
где  ,
— конструктивный коэффициент, зависящий
от геометрических размеров машины, типа
и параметров обмотки статора.
,
— конструктивный коэффициент, зависящий
от геометрических размеров машины, типа
и параметров обмотки статора.
В синхронной машине ротор вращается синхронно с полем статора, т.е. по отношению к вращающемуся полю, обмотка ротора неподвижна и в ее проводниках ЭДС не индуцируется.
Напротив,
в асинхронной машине частоты вращения
магнитного поля статора  и ротора
и ротора  неодинаковы.
Поэтому обмотка ротора перемещается
относительно вращающегося поля статора
с частотой скольжения
неодинаковы.
Поэтому обмотка ротора перемещается
относительно вращающегося поля статора
с частотой скольжения  .
.
В
соответствии с этим ЭДС ротора асинхронной
машины вращающегося со скольжением  определяется по формуле
,
где
определяется по формуле
,
где — конструктивный коэффициент обмотки
ротора.
— конструктивный коэффициент обмотки
ротора.