Параметрическое регулирование скорости двигателя постоянного тока.
 .
.
Реостатное регулирование.
Реостатный способ регулирования осуществляется путем изменения активного сопротивления резистора, включенного в цепь якоря двигателя. Переключение степеней резистора, в зависимости от мощности двигателя, производится или плоским контроллером или силовыми контакторами.
1 способ. Используется для двигателей малой мощности. Число степеней большое, коэффициент плавности больше единицы w1.
Для двигателей большой мощности используется 2 способ, он более дорогостоящий, поэтому число степеней небольшое и коэффициент плавности значительно отличается от единицы.
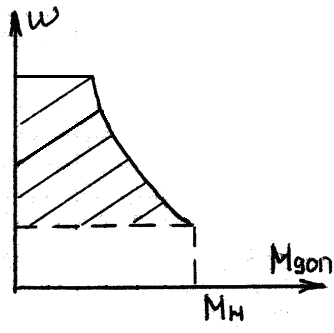
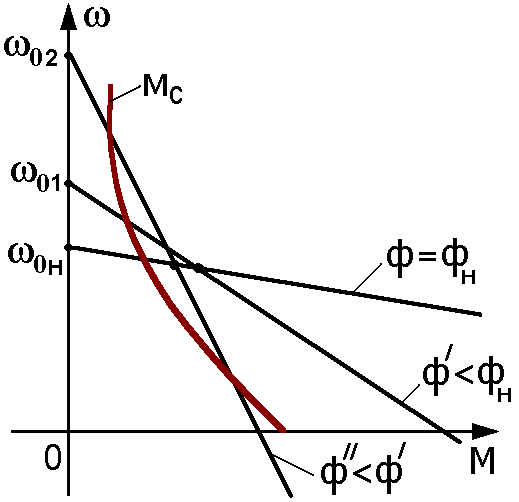
Для всех типов электродвигателей регулирование скорости осуществляется вниз от основной номинальной скорости. При этом жесткость механической характеристики уменьшается. При снижении скорости потери электрической энергии растут, допустимый момент нагрузки остается практически постоянным.
Механические характеристики для двигателя постоянного тока независимого возбуждения при реостатном регулировании производятся при постоянном потоке и линейны. Ф=const. Если принять за допустимый момент по нагреву номинальный токI=Iн,Ф=Фн,Мдоп=КФнIян=Мн, т.е. момент не изменен от скорости, если принять что двигатель обдуваемый.
Достоинством реостатного регулирования является его простота, все искусственные механические характеристики лежат ниже естественных механических характеристик. Зависимость момента от вводимого в цепи якоря сопротивления линейно.
 .
.
weo(M)– скорость двигателя на естественной характеристике при заданном моменте.
 — падение скорости двигателя за счет
введения дополнительного сопротивления
в цепь якоря.
— падение скорости двигателя за счет
введения дополнительного сопротивления
в цепь якоря.
 — падение скорости двигателя за счет
введения дополнительного сопротивления
в цепь якоря.
— падение скорости двигателя за счет
введения дополнительного сопротивления
в цепь якоря.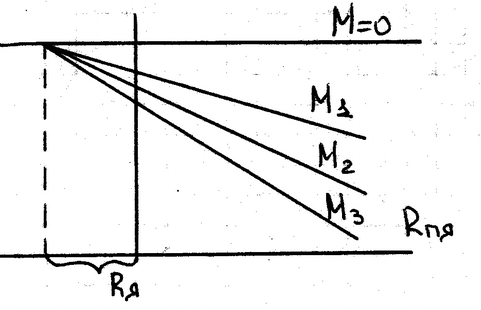
Со снижением скорости при реостатном регулировании уменьшает жесткость механических характеристик, при реостатном регулировании также мал диапазон регулирования скорости.
 ;
; .
.
Диапазон
регулирования  .
.

 ;
; ;
;
 .
.
В практике часто вместо значения минимальной жесткости характеристики задают наибольшее отклонение момента статической нагрузки Мс=(0,5÷1)Мн.
 ;
; .
.
 ;
;Rя=0,04÷0,24;Д=2÷2,5;Мс=0,5÷1.
КПД средний:
 ;
; .
.
Для двигателей смешанного и последовательного возбуждения зависимость момента от ведения в цепи якоря дополнительного сопротивления, как и для двигателей постоянного тока с независимым возбуждением, имеет линейный характер
 .
.
Регулирование скорости двигателя постоянного тока независимого возбуждения изменением потока возбуждения.
Основным достоинством этого способа регулирования является, то что регулирование скорости реализуется за счет изменения режима работы в цепи относительно малой мощности. Кроме этого достоинством способа являются малые потери равные потерям при работе двигателя на естественной характеристике. Регулирование тока возбуждения производится или введением сопротивления в цепь обмотки возбуждения или за счет подключения обмотки возбуждения к регулируемому источнику питания.
Допустимый момент на валу двигателя I=Iн;М=КФIн.
 ;
; ;
; ;
;
При
этом способе регулирования, из анализа
механической характеристики, можно
видеть  ,
что скорость идеального холостого хода
,
что скорость идеального холостого хода растет, ток короткого замыкания остается
постоянным
растет, ток короткого замыкания остается
постоянным .
Момент короткого замыканияМкз=KФI
.
Момент короткого замыканияМкз=KФI .
.
Скорости механической характеристики
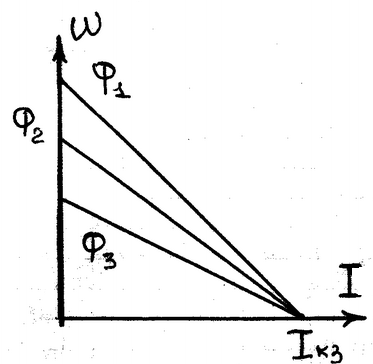 Ф1<Ф2<Ф3;
Ф1<Ф2<Ф3;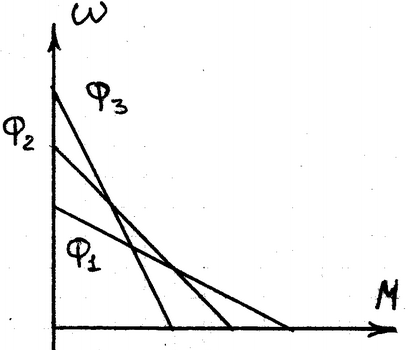
8.Регулирование скорости дпт нв и пв.
Рег-ние скорости ДПТ независимого возбуждения шунтированием якоря
 .
.
Крутизна этой характеристики больше естественной, но меньше искусственной с тем же Rп, но без шунтирования.
У
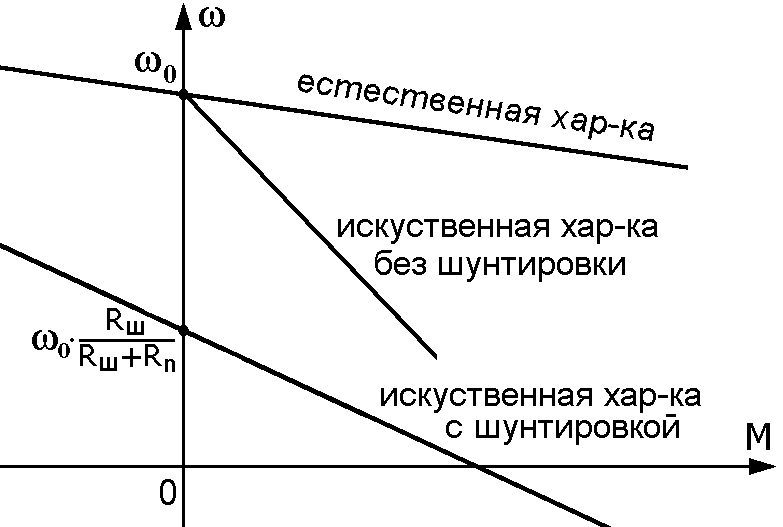
Для выявления влияния величин Rш и Rп на вид хар-к, одно из этих сопр-ний будем полагать неизмененным, а другое изменять от 0 до и наоборот. При изменении Rш от 0 до бесконечности и Rп = const 0 изменяется от 0ном до 0. При R
 .
Это выр-ние представляет собой
электромех-кую хар-ку динамического
торможения при замыкании якоря накоротко.
.
Это выр-ние представляет собой
электромех-кую хар-ку динамического
торможения при замыкании якоря накоротко.При Rш = и Rп = const  .
Это уравнение электромех-кой характеристики
в нормальной схеме включения с добавочным
сопротивлением Rп в цепи якоря.
.
Это уравнение электромех-кой характеристики
в нормальной схеме включения с добавочным
сопротивлением Rп в цепи якоря.
В
ур-ние
электромех-кой хар-ки (Rп=0 и Rш=const )
(Rп=0 и Rш=const )
При Rп= и Rш=const Д можно рассматривать как отключенный от сети и работающий в режиме динам-кого торможения на сопр-ние Rш. Ур-ние хар-ки, на которой он работает
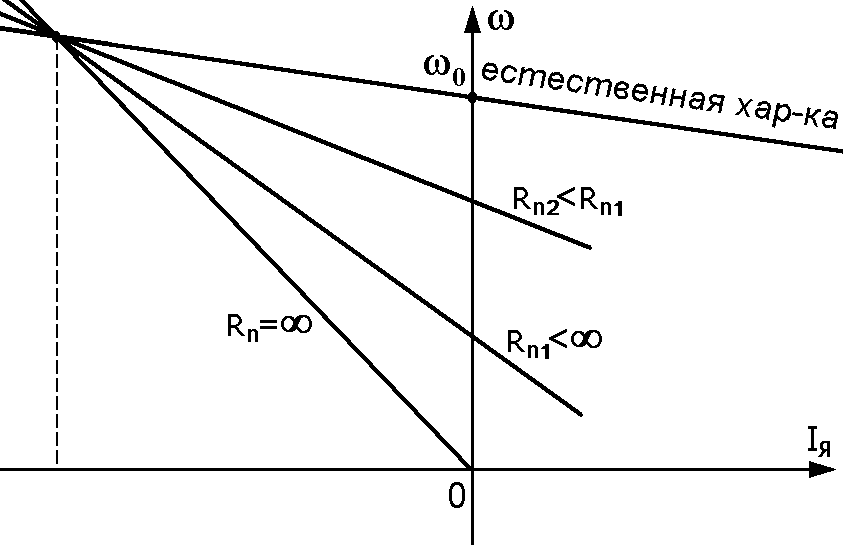
При изменении Rп от 0 до все возможные хар-ки будут лежать внутри угла, образованного естественной хар-кой при Rп=0 и хар-кой, соответствующей Rп= (см. график).
Плавность рег-ния при небольшой мощности Д, позволяющей использовать ползунковый реостат, достаточно высокая. Однако, с возрастанием мощности Д эта возм-сть исключается и рег-ние приходится осуществлять переключением ступеней регулировочных сопр-ний Rш и Rп с помощью силовой коммутационной аппаратуры. Т.к. при рег-нии этим способом поток Ф Д остается постоянным (Ф=Фн), допустимая нагрузка без учета изменения условий охлаждения постоянна и равна М=Мдоп=Мн=const.
КПД в схеме с шунтированием меньше, чем просто при реостатном рег-нии, т.к. ток, потребляемый из сети этом случае больше на величину тока в шунтирующем сопр-нии, а значит, больше и потребляемая из сети мощность.Это обстоятельство ограничивает применение данной схемы двигателями малой мощности (реже средней) при кратковременном снижении скорости. Диапазон регулирования не превышает (45):1.
Рег-ние скорости ДПТ посл-ного возб-ния при посл-тельно-парал-ном включении
Подобный способ регулирования осуществим в том случае, если производственный механизм приводится в движение одновременно несколькими (обычно двумя) двигателями. Применение двух двигателей половинной мощности вместо одного возможного или из-за необходимости уменьшения момента инерции, или по условиям большей надежности работы, или по условиям удобства размещения двух двигателей меньших габаритов вместо одного большого. Такой привод находит применение для мощных разливочных кранов, в транспортных устройствах, в доменных подъемниках, мощных ножницах для резки металла и ряде других механизмов. В таких механизмах два двигателя одинаковой мощности работают на один общий вал.
П
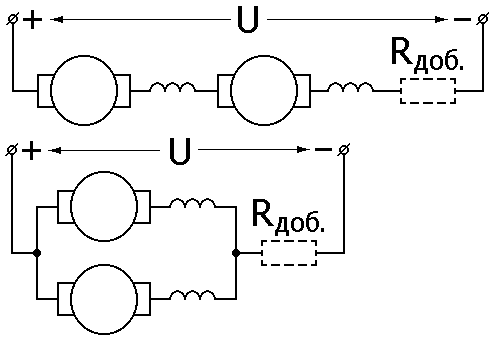
Таким образом получается две ступени регулирования без добавочной бесполезной траты энергии. При снижении скорости вдвое роль добавочного сопротивления играет второй двигатель, полезно использующий энергию. Для получения промежуточных ступеней регулирования, в цепь якорей может быть введено добавочное сопротивление, как показано на схемах пунктиром. В целях полного использования двигателей регулирование может производиться при Мс = const (без учета ухудшения условий охлаждения).
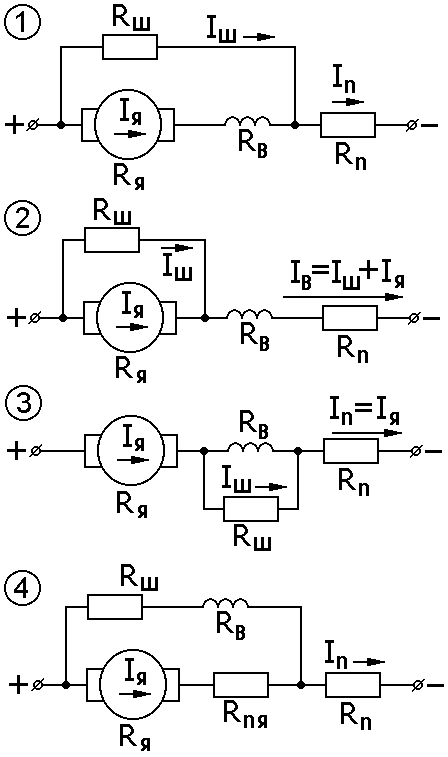
Рег-ние скорости ДПТ последовательного возбуждения в схемах с шунтированием
Для маломощных ДПВ может использоваться как и для ДНВ потенциометрическая схема рег-ния напряжения, приложенного к силовой цепи Д, позволяющая рег-вать его скорость. Возможны четыре основных варианта схем с шунтированием обмоток двигателя:
Схема с шунтированием двигателя.
Схема с шунтированием якоря.
Схема с шунтированием обмотки возбуждения.
Схема с параллельным включением обмотки якоря и обмотки возбуждения.
Во всех этих схемах в неразветвленной части обязательно должно быть последовательно включенное сопротивление Rп.
Снижение угловой скорости в схеме 1 вызывается падением напряжения на сопротивлении Rп, в результате чего на двигателе напряжение меньше, чем подводимое из сети напряжение. Энергетические показатели этой схемы хуже чем обычной схемы с последовательным сопротивлением в цепи якоря. Поэтому она не находит широкого применения.
Н
Скорость двигателя регулируется обычно ступенчато вниз от основной в широких пределах, которые зависят от соотношения сопротивлений Rш и Rп, от насыщения машины и нагрева обмотки возбуждения.
С уменьшением Iя ток возбуждения Iв тоже уменьшается, а растет. При = 0 ЭДС якоря станет равной падению напряжения в сопротивлении Rш, создаваемому током, протекающим по этому сопротивлению, обмотке возбуждения и Rп. Это будет режим идеального холостого хода. При > 0 двигатель переходит в генераторный режим и совместно с сетью начинает питать шунтирующий контур (Rя и Rш), отчего ток в нем увеличивается. Поступающая с вала механическая энергия преобразуется в электрическую и совместно с энергией, потребляемой из сети, теряется в сопротивлениях Rя и Rш. Увеличение тока в контуре Rя — Rш увеличивает падение напряжения на Rш, что приводит к уменьшению потока Ф, т.к. будет уменьшаться ток Iв, т.е. ток, потребляемый из сети. При
 Iв0,
следовательно, Ф 0 и .
Iв0,
следовательно, Ф 0 и .
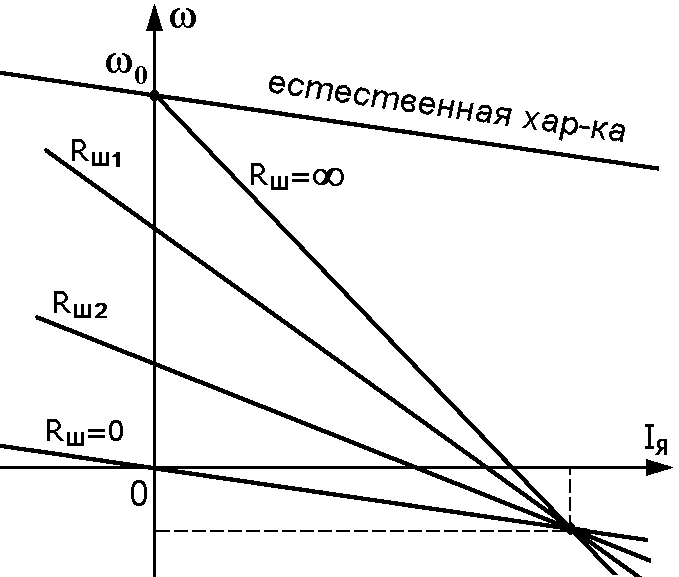
В
связи с этим электромех-кая хар-ка
двигателя =f(Iя) асимптотически приближается к линии,
параллельной оси ординат и соответствующей
току  (см. график.)
(см. график.)
Т

Семейства электромеханических и механических характеристик для случая Rш= const и Rп= var выглядят так, как изображено на следующих рисунках.
В

Семейство характеристик при Rп= const и Rш= var представлено на следующих рисунках.
П
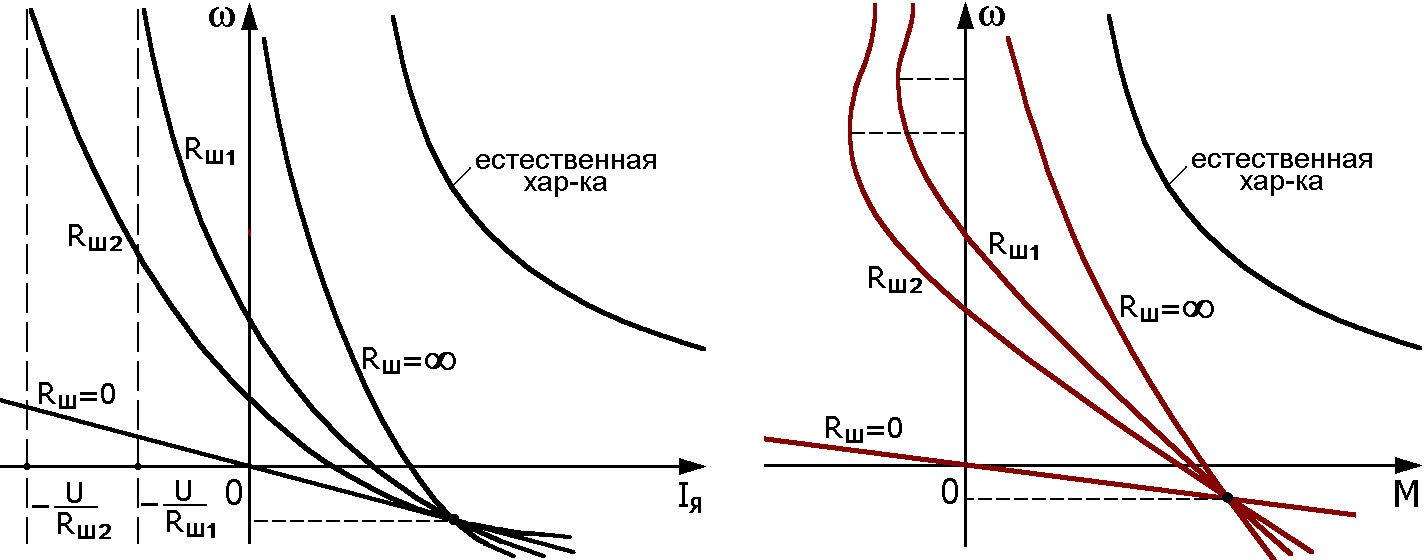
Уменьшение величины Rш сдвигает характеристики влево и вниз. Максимальный тормозной момент (у механических характеристик) в тормозном режиме увеличивается и уменьшается скорость, при которой М достигает максимума.
Рег-ние скорости ДПВ шунтир-нием якоря не экон-чно. Потери мощности и значение КПД в этой схеме такие же, как и в случае шунт-ния якоря ДНВ. Поэтому эта схема применима для рег-ния при отн-но непродол-ной работе в зоне низких скоростей.
Поскольку в этой схеме в двигательном режиме IвIя, в качестве критерия допустимой нагрузки при постоянной теплоотдаче приходится принимать номинальный ток обмотки возбуждения, т.е. Iдоп=Iвн=Iн, что обеспечивает регулирование при Ф=Фн, но требует по мере снижения уменьшения момента МдопМн таким образом, чтобы выполнялось условие Iя.доп =Iн — Iш.
Регулирование скорости ДНВ изменением магнитного потока
Этот способ рег-ния применим для всех ДПТ, но наибольшее применение он получил для ДНВ. Он является одним из наиболее простых и экономичных способов, т.к. мощность, потребляемая обмоткой возбуждения, составляет (23)% от мощности Д. Поэтому этот способ широко используется в разомкнутых системах ЭП, получающих питание от сети пост. тока с U= const, в замкнутых системах ГД и ТП-Д с двухзонным рег-нием скорости, а также в системах ИТ-Д, замкнутых по цепи возбуждения Д отрицательной обратной связью по скорости.
Т
Статические механические хар-ки Д при рег-нии потока изображены на следующем рис.
Точки пересечения хар-тик, соотв-щих ослабленному потоку с естественной хар-кой по мере уменьшения Ф перемещаются в сторону меньших моментов (нагрузок). При реальных пределах ослабления Ф и при нагрузках, не превышающих существенно номинальную, скорость Д при ослаблении Ф увеличивается.
Большинство ДНВ допускает увеличение за счет ослабления Ф не больше, чем на (1020)% сверх 0. Д, специально сконструированные для широкого рег-ния скорости, т.е. рассчитанные на глубокие ослабления Ф,позволяют повысить скорость в 3 – 5, а в ряде случаев и в 8 – 10 раз сверх 0 при номинальном потоке. Пределы изменения скорости сверху ограничены механической прочностью якоря и условиями коммутации.
Допустимая нагрузка на валу двигателя найдется из условия, согласно которому ток Iя при рег-нии остается постоянным и равным Iн, т.е.
 ,
,
где РЭМ.Н – номинальная электромагнитная мощность двигателя.
Допустимая мощность на валу двигателя
Рдоп=Мдоп· =РЭМ.НОМ = const.
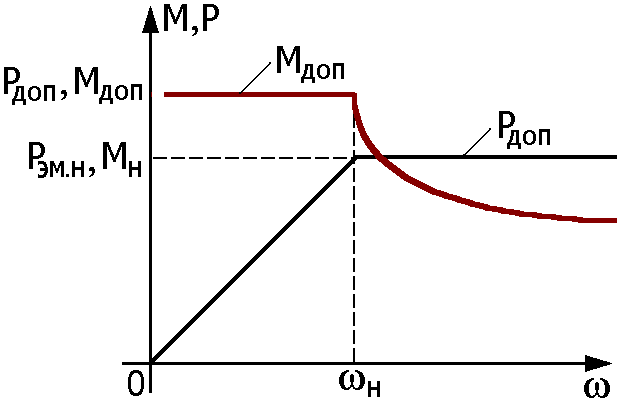
Таким образом, при данном способе рег-ния скорости допустимый момент Д изменяется по гиперболическому закону, а допустимая мощность остается постоянной. Поэтому рег-ние скорости ДНВ ослаблением потока для полного использования Д по нагреву должно осуществляться при постоянной мощности нагрузки.
На приведенном ниже рисунке изображены зависимости Мдоп=f() и Pдоп=f() в диапазоне изменения скорости ДНВ, обеспечиваемом реостатным рег-нием, регулированием подводимого к якорю и регулированием ослаблением Ф.
П
Полному испол-нию Д при работе с ослабленным потоком отвечают точки, лежащие на гиперболической кривой стат-ого момента Мс (см. предыдущий график). При работе со скоростями, соответствующим нагрузкам левее кривой Мс Д будет перегружен, а правее – напротив, недогружен.
При Мс=const и длительной нагрузке Д нужно выбирать так, чтобы при наибольшей угловой скорости ток в якорной цепи был примерно равен номинальному. При меньших скоростях приходится в этом случае мириться с недогрузкой двигателя, т.к. ток в якоре становится меньше номинального вследствие возрастания потока.
Рег-ние скорости изменением Ф обеспечивает большую плавность. Простота, экономичность данного способа и благоприятные рег-чные хар-ки определяют его широкое применение. Для механизмов, момент сопр-ния которых при рег-нии скорости изменяется так, что мощность остается примерно постоянной, ослабление Ф ДНВ является лучшим способом рег-ния скорости.
3.2. Регулирование скорости, тока и момента дпт независимого возбуждения с помощью резисторов в цепи якоря
Этот способ, часто называемый реостатным, является весьма простым по своей реализации и поэтому широко используется для регулирования скорости, тока и момента ДПТ. Семейство искусственных (регулировочных) характеристик ДПТ можно получить, проанализировав, например, как изменяется скорость холостого ДПТ 0и наклон его характеристик при варьировании сопротивления добавочного резистораRд,.Из (3.6а) видно, что0не зависит отRд,поэтому все искусственные характеристики пересекаются на оси скорости в точке с координатой=0;I=0;М=0.
Кроме того, наклон характеристики,
определяемый перепадом скорости  ,
пропорционален (при фиксированных
значениях токаIи
моментаМ) полному сопротивлению
якоря. Поэтому по мере увеличенияRд,наклон характеристик также увеличивается,
они становятся более мягкими.
,
пропорционален (при фиксированных
значениях токаIи
моментаМ) полному сопротивлению
якоря. Поэтому по мере увеличенияRд,наклон характеристик также увеличивается,
они становятся более мягкими.
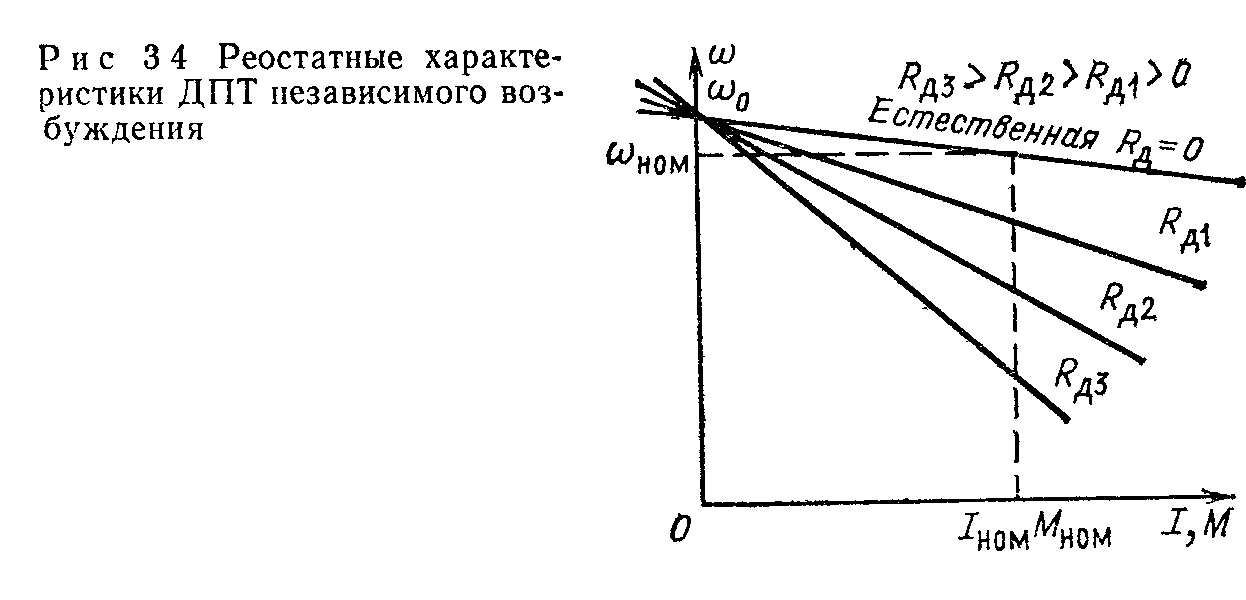
Проведенный анализ позволяет изобразить искомое семейство электромеханических и механических характеристик в виде совокупности линий, показанных на рис. 3.4. При Rд=0 ДПТ имеет естественные механическую и электромеханическую характеристики, на которых находится точка номинального режима с координатамином,Iномином,Мном.
а) Регулирование скорости.Оценим данный способ регулирования скорости по основным показателям, рассмотренным в § 2.2.
1.Диапазон регулирования скорости небольшой и обычно не превосходит 2–3. Причина этого заключается в снижении жесткости характеристик по мере увеличенияRди, как будет показано далее, в значительных потерях мощности при больших диапазонах регулирования скорости.
2.Направление регулирования скорости–вниз от естественной характеристики.
3.Плавность регулирования скорости определяется плавностью измененияRд.Если сопротивление этого резистора изменяется плавно, то данный способ обеспечивает плавное регулирование скорости, если жеRдизменяется ступенчато, то и регулирование скорости будет неплавным. Чаще всего рассматриваемый способ обеспечивает ступенчатое регулирование скорости.
4.Стабильность скорости снижается по мере увеличения диапазона регулирования и в общем случае является невысокой.
5Экономичность регулирования скорости оценим, сопоставив требуемые капитальные затраты на реализацию данного способа и стоимость потерь мощности при регулировании. Капитальные затраты на приобретение добавочных резисторов невелики, так как стоимость используемых резисторов обычно мала. В то же время потери мощности и соответственно расход электроприводом электрической энергии и ее стоимость оказываются значительными. Покажем это
Потери мощности в ДПТ Ропределяются разностью мощностей, потребляемой из сети,P1=UIи полезной механическойP2=M,отданной с вала,

Выполнив несложные преобразования, получим
 ,(3.9)
,(3.9)
где  – относительный перепад скорости.
– относительный перепад скорости.
Из (3 9) видно, что уже при снижении скорости
в 2 раза по сравнению со скоростью
идеального холостого хода 0,
т. е. при и
и ,половина всей потребляемой из сети
мощностиP1идет
на потери мощности в самом ДПТ. Таким
образом, КПД привода уже приD=2
не превышает 50 %, а при больших диапазонах
снижается в еще большей степени
,половина всей потребляемой из сети
мощностиP1идет
на потери мощности в самом ДПТ. Таким
образом, КПД привода уже приD=2
не превышает 50 %, а при больших диапазонах
снижается в еще большей степени
6.Допустимую нагрузку ДПТ на искусственных характеристиках найдем, если в (3.3) положим Ф=ФномиI=Iном. Тогда получаемое выражение определит допустимый по условиям нормального нагрева момент ДПТ
 , (3.10)
, (3.10)
который оказывается равным номинальному моменту двигателя Мном. Таким образом, при работе ДПТ на искусственных характеристиках он может быть нагружен моментом нагрузки, равным номинальному моменту ДПТ, находясь при этом в нормальном тепловом режиме. Это заключение полностью справедливо для тех ДПТ независимого возбуждения, у которых условия охлаждения не изменяются по мере снижения их скорости. К таким ДПТ относятся, например ДПТ с независимой внешней вентиляцией и закрытые ДПТ без вентилятора. В тех же случаях, когда ДПТ охлаждается за счет собственного вентилятора на валу, при снижении скорости его охлаждение ухудшается, что требует соответствующего снижения момента нагрузки.
Несмотря на не очень высокие технико-экономические показатели, реостатное регулирование скорости из-за простоты своей реализации используется достаточно широко тогда, когда требуется небольшой диапазон регулирования скорости движения исполнительного органа или когда работа на пониженных скоростях имеет кратковременный характер. В частности, такое регулирование применяется в электроприводах подъемных кранов, некоторых металлорежущих станков, лифтов.
б) Регулирование (ограничение) тока и
момента.Получаемые искусственно
характеристики широко используются
для регулирования (ограничения) тока и
момента ДПТ независимого возбуждения
в переходных процессах, в которых ток
и момент могут принять недопустимо
большие значения для ДПТ. Так, в первый
момент пуска ДПТ находится в режиме
короткого замыкания (=0;E=0) и ток короткого
замыкания при его пуске по естественной
характеристике определяется соотношением .
Из-за малостиRя(доли ома или единицы ом)
.
Из-за малостиRя(доли ома или единицы ом) ,
в то время как допустимый для ДПТ
общепромышленного назначения ток
,
в то время как допустимый для ДПТ
общепромышленного назначения ток .
Таким образом, возникает необходимость
ограничения тока (и тем самым момента)
при пуске ДПТ, что может быть достигнуто
введением в цепь якоря добавочных
пусковых резисторов. Такая же необходимость
возникает при реверсе и торможении ДПТ
независимого возбуждения.
.
Таким образом, возникает необходимость
ограничения тока (и тем самым момента)
при пуске ДПТ, что может быть достигнуто
введением в цепь якоря добавочных
пусковых резисторов. Такая же необходимость
возникает при реверсе и торможении ДПТ
независимого возбуждения.
Для ограничения тока и момента при пуске в простейшем случае используется одна искусственная характеристика 1(рис. 3.5). Порядок пуска ДПТ следующий: вначале он начинает работать по характеристике1при наличии в цепи якоря добавочного резистораRд1. Далее при скорости1резисторRд1закорачивается и ДПТ переходит на естественную характеристику. Сопротивление резистораRд1выбирается из условия обеспечения допустимого тока в начальный момент пуска
 , (3.11)
, (3.11)
где Iдоп – допустимый ток.
Во многих случаях при пуске ДПТ используется не одна, а несколько искусственных характеристик. Их количество зависит от момента нагрузки электропривода и требований плавности переходных процессов.
Динамическое торможение ДПТ осуществляется отключением якоря от сети и замыканием его по схеме рис. 3.2 на резистор Rд2. Двигатель переходит на характеристику динамического торможения2(рис. 3.5), по которой и происходит торможение.

Сопротивление резистора Rд2определяется по допустимому броску
тока в первый момент перехода в режим
динамического торможения. Так как в
этот момент ,
тоEU,и сопротивлениеRд2определится как
,
тоEU,и сопротивлениеRд2определится как
 (3.12)
(3.12)
Реверс или торможение противовключением осуществляется изменением полярности напряжения на якоре ДПТ с одновременным вводом в якорь резистора Rд3. Двигатель переходит на характеристику3(рис. 3.5), попадая в режим торможения противовключением. В этом режиме ЭДС и напряжение сети совпадают по направлению, поэтому резисторRд3определяется по выражению
 .(3.13)
.(3.13)
В некоторых случаях для достижения более точного регулирования тока и момента в переходных режимах используется не одна искусственная характеристика, а несколько, как, например, при реализации пусковой диаграммы ДПТ (см. рис. 3.8). Отметим, что в рассматриваемом случае резисторы вводятся в цепь якоря только в переходных режимах работы ДПТ.
в) Расчет регулировочных резисторов.Выражения (3.11)–(3.13) позволяют рассчитать сопротивления добавочных резисторов в цепи якоря ДПТ по критерию допустимого тока. Рассмотрим теперь общие методы расчета сопротивлений регулировочных резисторов.
Задача формируется следующим образом: известны технические данные ДПТ и его естественная электромеханическая характеристика.
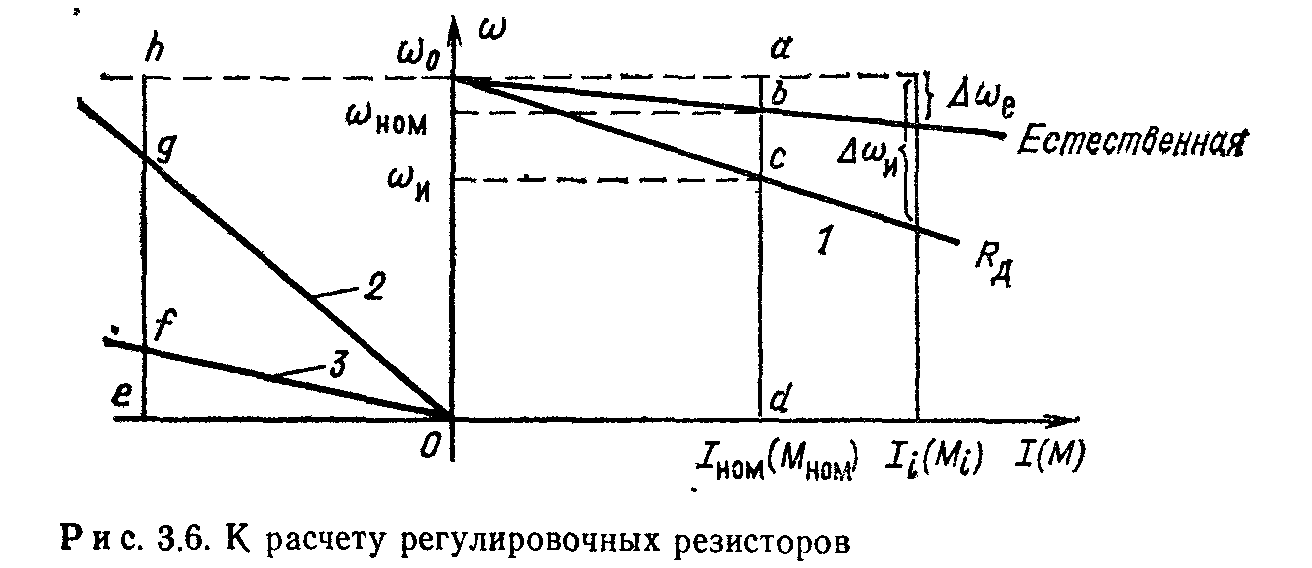
По условиям регулирования скорости, тока или момента задана искусственная характеристика (прямые 1–3на рис. 3.6). Требуется определить сопротивление добавочного резистора, при включении которого в цепь якоря будет обеспечена заданная характеристика.
Метод отрезков. Для получения расчетной формулы этого метода запишем согласно (3.4) выражение для скорости ДПТ на заданной искусственной характеристике при номинальных токе, моменте, магнитном потоке и напряжении
 . (3.14)
. (3.14)
Так как  ,
то (3.14) можно записать так:
,
то (3.14) можно записать так:
 (3.15)
(3.15)
где  – так называемое номинальное сопротивление
ДПТ, Ом.
– так называемое номинальное сопротивление
ДПТ, Ом.
Из (3.15) получаем следующее соотношение:
 , (3.16)
, (3.16)
которое
отражает очень важное свойство ДПТ:
относительный перепад скорости ДПТ  равен относительному активному
сопротивлению цепи якоряR/Rном.
Отметим, забегая вперед, что это свойство
характерно и для других типов двигателей,
в частности асинхронных. Пропорцию
(3.16) удобно решать графически, для чего
обратимся к рис. 3.6. Обозначим на нем
характерные точкиа,b,
с, dи отметим, что
равен относительному активному
сопротивлению цепи якоряR/Rном.
Отметим, забегая вперед, что это свойство
характерно и для других типов двигателей,
в частности асинхронных. Пропорцию
(3.16) удобно решать графически, для чего
обратимся к рис. 3.6. Обозначим на нем
характерные точкиа,b,
с, dи отметим, что  ;
; .
Тогда
.
Тогда
 ; (3.17)
; (3.17)
 ; (3.18)
; (3.18)
 . (3.19)
. (3.19)
Таким образом, для нахождения Rд следует по характеристикам определить
длины отрезковbcиadпри номинальном токе, рассчитать
номинальное сопротивление и затем воспользоваться формулой (3.18).
Этот же порядок расчета сохраняется
тогда, когда исходными являются
механические характеристики ДПТ. В этом
случае длины отрезков определяются при
номинальном моменте.
и затем воспользоваться формулой (3.18).
Этот же порядок расчета сохраняется
тогда, когда исходными являются
механические характеристики ДПТ. В этом
случае длины отрезков определяются при
номинальном моменте.
Данный метод справедлив также и при расчете резисторов в схеме динамического торможения. Опуская вывод, который может быть сделан аналогичным образом, приведем окончательную формулу для расчета Rд,т,обеспечивающего характеристику динамического торможения вида2 на рис. 3.6,
 . (3.20)
. (3.20)
Отметим, что характеристика 3 на этом рисунке соответствует Rд,т=0 и располагается параллельно естественной характеристике.
Метод пропорций. При применении этого метода используется выражение для перепада скорости на характеристиках ДПТ. Если согласно (3.6) записать выражения дляна естественной и искусственной электромеханической или механической характеристике при одном и том же токеIiили моментеМi(рис. 3.6), а затем найти их отношение, то получится следующая пропорция:
 . (3.21)
. (3.21)
Определяя из (3.21) Rд,получаем формулу для расчетаRдметодом пропорций
 (3.22)
(3.22)
Значения eиинаходятся, как и ранее, по характеристикам рис. 3.6.
При расчетах регулировочных резисторов в цепях якоря ДПТ независимого возбуждения необходимо знать собственное сопротивление якоря ДПТ Rя. Назовем возможные способы его нахождения.
1.Некоторые заводы-изготовители приводят в каталогах значениеRя.
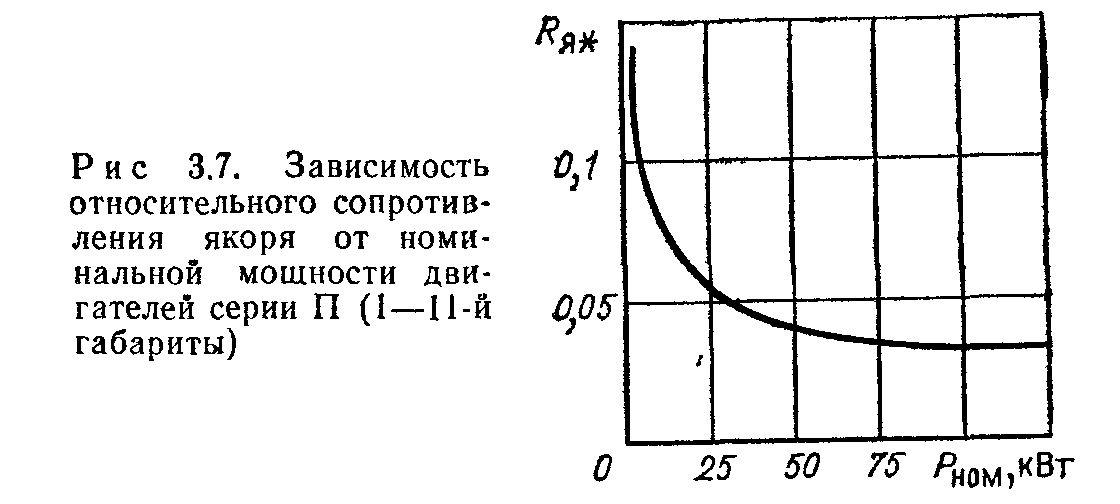
2.В справочной литературе
по электрическим машинам, например
[41], даются обобщенные зависимости
относительного сопротивления якоря от мощностиРномдля ДПТ
некоторых серий. Для примера на рис. 3.7
приведена эта зависимость для ДПТ серии
Л (1–11-й габариты).
от мощностиРномдля ДПТ
некоторых серий. Для примера на рис. 3.7
приведена эта зависимость для ДПТ серии
Л (1–11-й габариты).
3.При наличии ДПТ сопротивлениеRяможет быть определено экспериментально, путем непосредственного измерения его между щетками ДПТ
4.При невозможности воспользоваться указанными выше способами может быть применена следующая приближенная формула для определенияRяпо номинальным паспортным данным ДПТ:
 (3.23)
(3.23)
где ном– номинальный КПД двигателя.
5.При наличии экспериментально снятой электромеханической или механической характеристики ДПТ значениеRяможет быть определено по методу отрезков с помощью формулы (3.19).
Пример 3.1.Рассчитать и построить естественные электромеханическую и механическую характеристики ДПТ, имеющего следующие паспортные данные:Рном=2,2 кВт;Uном=220 В;Iном=13 А;nном=1000 об/мин;ном=77 %;Iв,ном=0,73 А;Rо,в=300 Ом.
Для построения искомых характеристик, которые представляют собой прямые линии, достаточно определить координаты двух точек: номинального режима и холостого хода
1.Для точки номинального режима определяем номинальную угловую скорость

номинальный момент

номинальное сопротивление ДПТ

2.Далее по приближенной формуле (3.23) находим сопротивление якорной цепи

3.Используя (34), определяем
значение

4.Скорость идеального холостого хода согласно (3.6а) равна

5.По координатам точек холостого хода (0, 0) и номинального режима (ном,Iном) на рис 38 построена естественная электромеханическая характеристика ДПТ независимого возбуждения Естественная механическая характеристика также может быть построена по этим же двум точкам
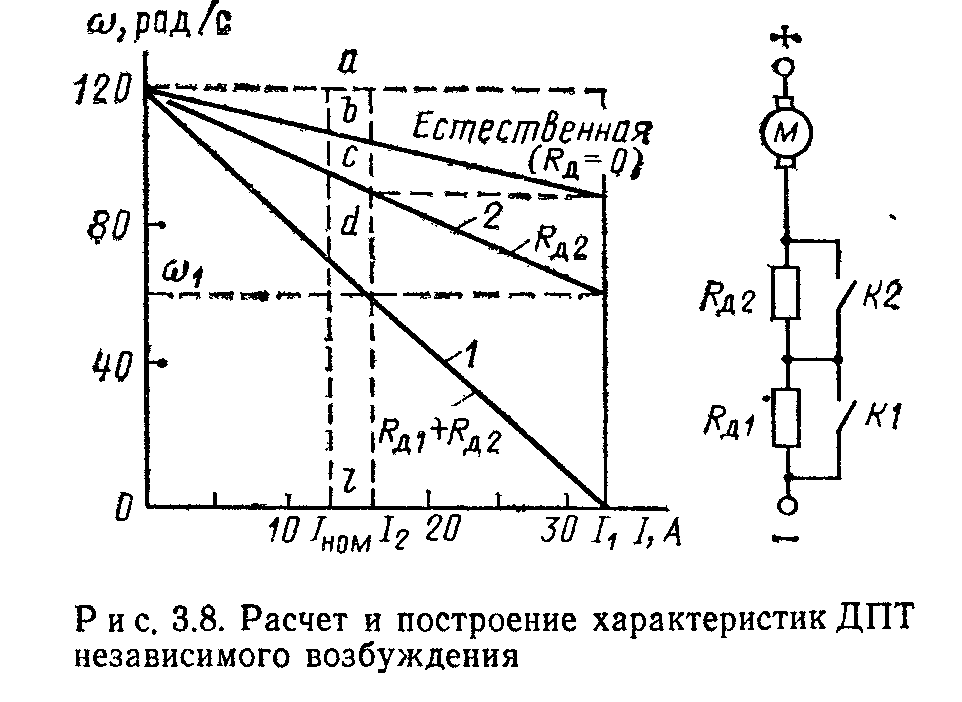
Пример 3.2.Расчитать и построить для ДПТ (см. пример 3 1) пусковую диаграмму при использовании двух ступеней пускового резистора.
Построение пусковой диаграммы ДПТ осуществляется в следующем порядке.
1.Рассчитывается максимально допустимый при пуске токI1=Iдоп. Для рассматриваемого примера примем

2.Определяется ток переключения I2,значение которого можно получить двумя путями;
а) подбором с таким расчетом, чтобы число искусственных характеристик равнялось двум, а ток в переходном процессе не превосходил Iдоп;
б) расчетом с помощью следующей формулы, которая приводится без вывода:
 (3.24)
(3.24)
где т –число заданных ступеней пускового резистора.
Методом подбора из рис. 3.8 находим I2=16
А. Отметим, что если пуск ДПТ осуществляется
под нагрузкой, то токI2должен на 10–20 % превосходить ток нагрузкиIс, т. е. должно
соблюдаться равенство: 
3.С помощью метода отрезков определяем сопротивление ступеней пускового резистора
Искусственная характеристика Iна рис. 3.8 соответствует наличию в цепи якоря обеих ступеней пускового резистораRд1+Rд2, а характеристика2–второй ступениRд2. На рис. 3.8 изображена также схема якорной цепи двигателя при реализации этой пусковой диаграммы.
3.3. Регулирование скорости дпт независимого возбуждения изменением магнитного потока
Искусственные характеристики ДПТ независимого возбуждения, получаемые путем изменения магнитного потока ДПТ, используются главным образом для регулирования скорости. Этот способ находит широкое применение в автоматизированном электроприводе вследствие простоты его реализации и экономичности, так как регулирование осуществляется в относительно маломощной цепи возбуждения ДПТ.
Регулирование магнитного потока при использовании этого способа производится только в сторону его уменьшения (ослабления) по сравнению с номинальным за счет уменьшения тока возбуждения IВ. Причины этого кроются в следующих двух обстоятельствах.
1.Увеличение магнитного потока должно вызываться соответствующим увеличением тока возбуждения ДПТ. Однако поскольку номинальный магнитный поток создается номинальным током возбуждения, то увеличение тока возбуждения выше номинального вызывает дополнительный нагрев ДПТ, что недопустимо.
2.Двигатель рассчитан и сконструирован таким образом, что его магнитная система близка к насыщению.
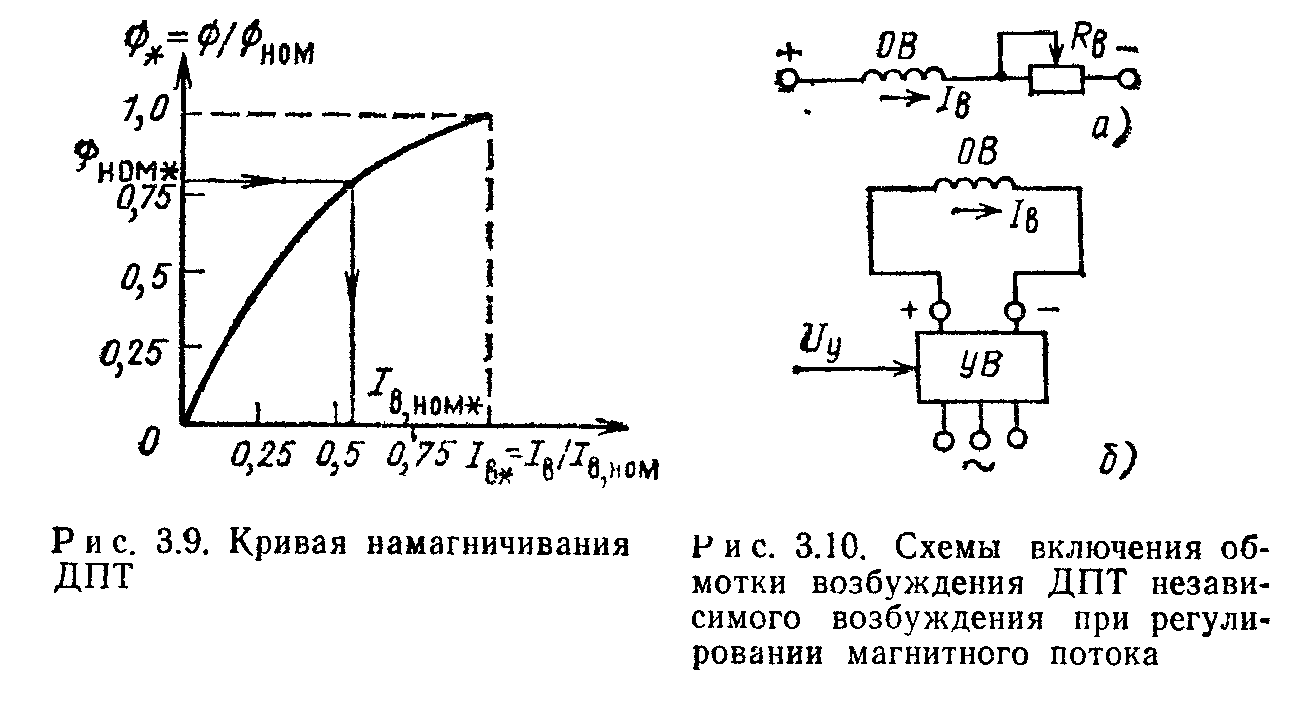
Это обстоятельство отражается в
расположении номинальной точки  на кривой намагничивания ДПТ
на кривой намагничивания ДПТ (рис.
3.9) в области насыщения. По этой причине
стремление увеличить магнитный поток
не даст заметного практического
результата.
(рис.
3.9) в области насыщения. По этой причине
стремление увеличить магнитный поток
не даст заметного практического
результата.
Возможные схемы включения обмотки возбуждения ДПТ независимого возбуждения приведены на рис. 3.10. Схема рис. 3.10, апредусматривает включение в цепь возбуждения добавочного резистораRв,за счет чего ток возбужденияIви тем самым магнитный поток могут быть уменьшены. В схеме рис. 3.10,бдля изменения тока возбуждения используется управляемый выпрямительУВ,выходное напряжение которого регулируется по сигналу управленияUy.Эта схема более экономична и применяется для регулирования тока возбуждения мощных ДПТ.
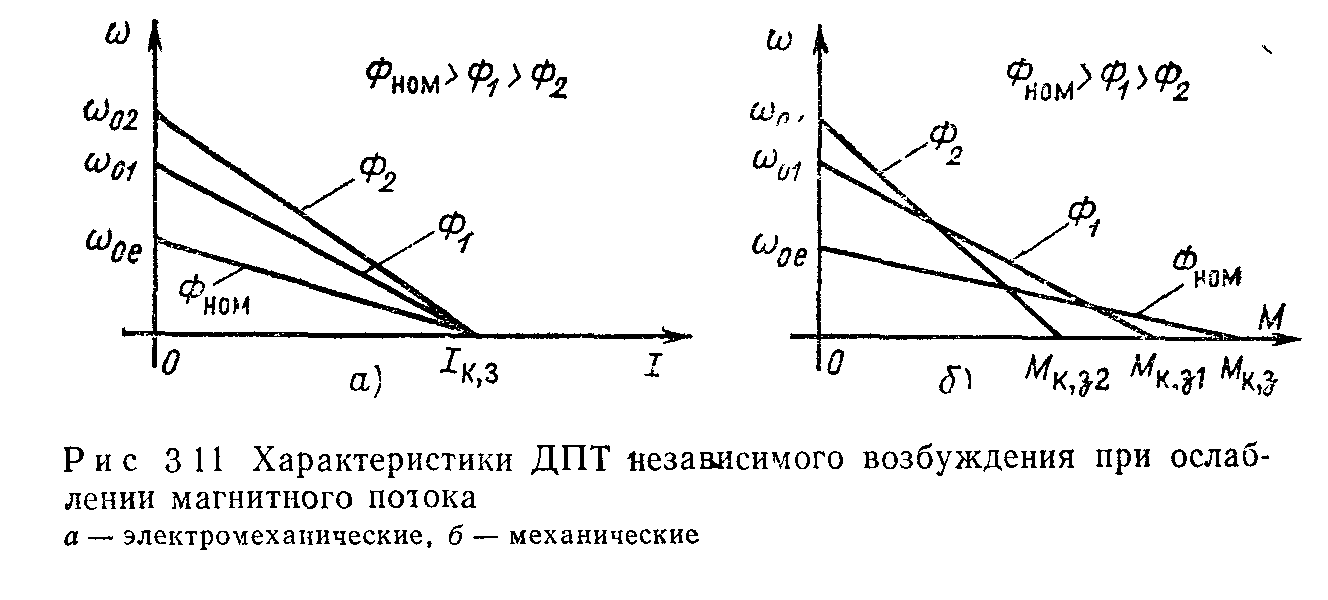
Семейство искусственных характеристик ДПТ (I) и(М)получим, рассмотрев изменение координат точек холостого хода и короткого замыкания при варьировании магнитного потока. В соответствии с (3.6а) уменьшение магнитного потока приведет к увеличению скорости идеального холостого хода0.
Ток короткого замыкания Iк,з=U/Rяот магнитного потока не зависит и будет оставаться неизменным. Другими словами, все искусственные электромеханические характеристики проходят через одну и ту же точку на оси тока с координатами (0;Iк,з).
Все сказанное позволяет представить электромеханические характеристики ДПТ независимого возбуждения при уменьшении магнитного потока совокупностью прямых линий, приведенных на рис. 3.11, а. Момент короткого замыкания в соответствии с (3.3)
 (3.25)
(3.25)
Так как Iк,з=const, то при уменьшении магнитного потока пропорционально ему уменьшается и момент короткого замыкания. В результате механические характеристики имеют вид прямых, показанных на рис. 3.11,б. Диапазон регулирования скорости при данном способе равен 3–4. Направление регулирования скорости – вверх от естественной характеристики. Плавность регулирования скорости определяется плавностью регулирования тока возбуждения. Стабильность скорости достаточно высокая, хотя она и снижается при уменьшении магнитного потока. Способ экономичен, так как не сопровождается значительными потерями мощности, а реализация его не требует больших капитальных затрат.
Допустимую нагрузку ДПТ при его работе на искусственных характеристиках определим по обычному правилу, полагая в (3.3) I=Iном,
 (3.26)
(3.26)
где Фи– магнитный поток на искусственной характеристике.
Так как при данном способе регулирования Фи<Фном, то иМдоп<Мном,т. е. ДПТ по условиям нагрева не может быть нагружен на искусственных характеристиках номинальным моментом. Для определения того, какую именно нагрузку он может нести, запишем выражение для ЭДС якоря на естественной и искусственной характеристиках приI=Iнoм
Так как Uном–IномRя=const, тоЕе=Еии справедливо следующее соотношение:
 (3.27)
(3.27)
где и – скорость на искусственной характеристике приI2=Iном.
Подставляя (3.27) в (3.26), получаем после несложных преобразований
 (3.28)
(3.28)
Таким образом, при работе ДПТ на искусственных характеристиках он может быть натружен на свою номинальную мощность. Объяснение этого заключается в том, что хотя момент нагрузки при уменьшении магнитного потока должен быть снижен, одновременно повышается скорость ДПТ, а их произведение, определяющее механическую мощность, остается неизменным и численно равным номинальной мощности ДПТ. Таким образом, этим способом осуществляется регулирование при постоянной мощности.
Данный способ нашел широкое применение в электроприводе металлорежущих станков, прокатных станов, наматывающих устройств. Он также часто используется в комбинации с другими способами регулирования скорости.
Пример 3.3.Определить магнитный поток, ток возбуждения и сопротивление добавочного резистораRвв схеме рис. 3.10, а (для ДПТ, указанного в примере 3 1), при которых скорость идеального холостого хода0ина искусственной характеристике будет на 25 % превышать скорость идеального холостого хода0ена естественной характеристике.
При решении задачи воспользуемся
формулой  ,
из которой следует!
,
из которой следует!

Для данного значения Фис помощью кривой рис 3 9 находимIв,и= Iв,и/Iв.ном=0,58 и далееIв,и=0,580,73=0,42 А. Сопротивление добавочного резистора определяем по формуле

3.3 Способы регулирования угловой скорости дпт с нв
Из
уравнений механической характеристики
(3.3) следует, что принципиально  может регулироваться изменением
может регулироваться изменением и
и .
.
Следует
отметить, что естественное снижение
скорости  с увеличением нагрузки не входит в
понятие регулирования
с увеличением нагрузки не входит в
понятие регулирования .
.
Одним
из показателей характеризующего
регулирования скорости является диапазон
регулирования  ,
которое определяется выражением
,
которое определяется выражением
 (3.8)
(3.8)
Как
правило диапазон регулирования
представляют в числах в виде соотношения
например 100:1 и т.д. Естественно  указывают с требуемой точностью
стабилизируют скорости изменением
отклонения момента нагрузки.
указывают с требуемой точностью
стабилизируют скорости изменением
отклонения момента нагрузки.
3.3.1 Регулирование скорости вращения двигателя изменением питающего напряжения.
Как следует из уравнения (3.3) при изменении питающего напряжения изменяется величина скорости холостого хода. В результате можно получить семейство механических характеристик (рис. 3.3).
Практически
имеется возможность только уменьшать
напряжение питания якоря относительно
его номинального значения  ,
т.е. при регулировании скорости
,
т.е. при регулировании скорости изменением
изменением должно соблюдаться неравенство
должно соблюдаться неравенство .
.
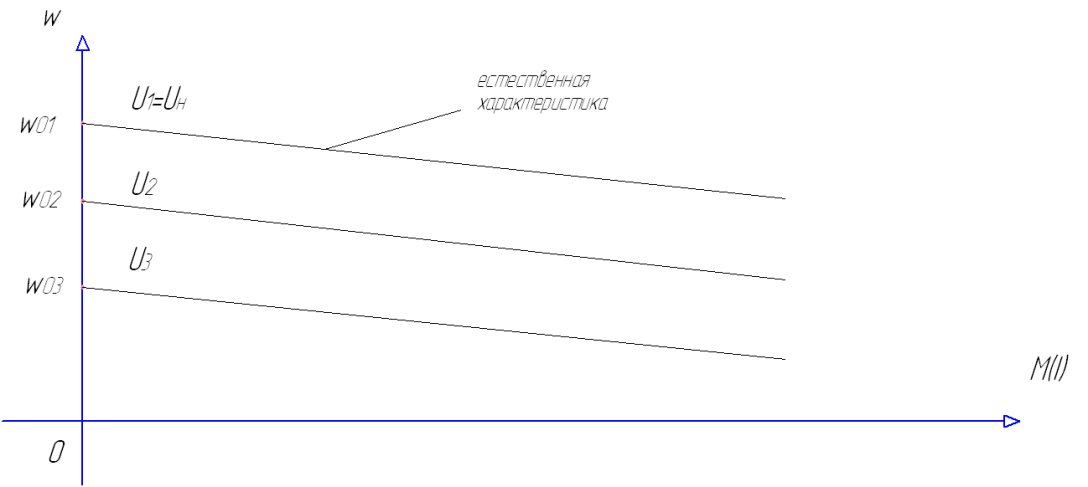
Рис.3.3
Механические характеристики ДПТ с НВ
при различных напряжениях 
Таким образом, скорость вращения при изменении напряжения на якоре ДПТ регулируется только вниз от основной, соответствующей естественной характеристике. Это обусловлено тем, что уже на стадии своего проектирования ДПТ рассчитывается на конкретное номинальное напряжение и превышение которого может привести к пробою изоляции. Напряжение на якоре может регулировать с помощью различных статических устройств (управляемые выпрямители, импульсные преобразователи и т.п.)
3.3.2 Регулирование угловой скорости вращения изменением потока возбуждения
При
введении добавочного сопротивления  в цепь обмотки возбуждения можно изменить
величину магнитного потока двигателя
в цепь обмотки возбуждения можно изменить
величину магнитного потока двигателя в сторону уменьшения от его номинально
значения
в сторону уменьшения от его номинально
значения ,
которое имеет место при
,
которое имеет место при .
Как не трудно видеть из уравнения
электромеханической характеристики
(3.2) для различных значений потока
.
Как не трудно видеть из уравнения
электромеханической характеристики
(3.2) для различных значений потока можно получить семейство электромеханических
характеристик, представленное на рис
3.4.
можно получить семейство электромеханических
характеристик, представленное на рис
3.4.
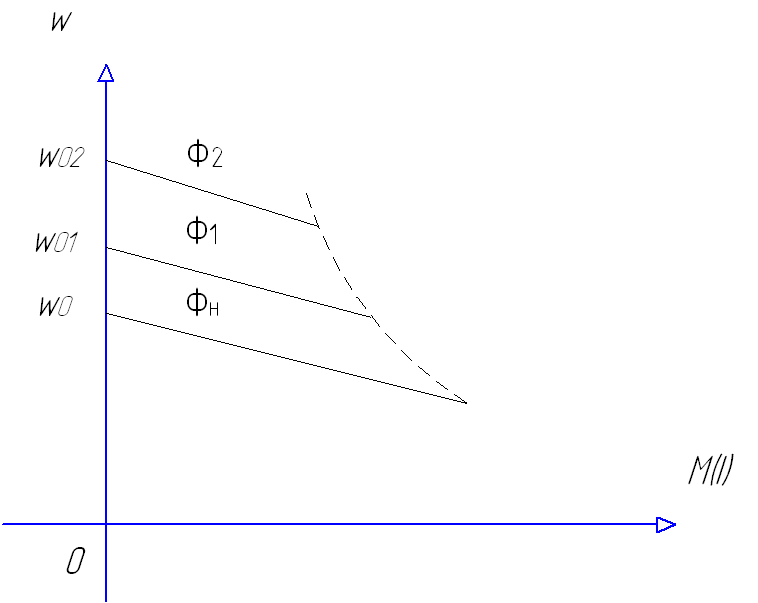
Рис
3.4 Механические (электромеханические
) характеристики при различных
потоках возбуждения
На
рис 3.4 нижняя характеристика соответствует
номинальному потоку возбуждения  .
Если при этом добавочное сопротивление
в якорной цепи
.
Если при этом добавочное сопротивление
в якорной цепи равно 0 и на якорь подается номинальное
напряжение
равно 0 и на якорь подается номинальное
напряжение ,
то эта характеристики будет естественной.
При уменьшении величины потока возбуждения
угловые скорости вращения холостого
хода возрастают в соответствии с
выражением (3.4).Ток короткого замыкания
при этом остается неизменным.
,
то эта характеристики будет естественной.
При уменьшении величины потока возбуждения
угловые скорости вращения холостого
хода возрастают в соответствии с
выражением (3.4).Ток короткого замыкания
при этом остается неизменным.
Пусковой
момент определяется выражением  ,
поэтому с уменьшением величины потока
возбуждения Ф уменьшается. Практически
этот способ используется только для
регулирования угловой скорости вращения
вверх от основной.
,
поэтому с уменьшением величины потока
возбуждения Ф уменьшается. Практически
этот способ используется только для
регулирования угловой скорости вращения
вверх от основной.
3.3.3 Реостатное регулирование угловой скорости вращения
Это
один из простейших способов регулирования
угловой скорости вращения. Для его
осуществления необходимо в цепи якоря
регулировать величину добавочного
сопротивления. Из уравнения механической
характеристики (9) следует, что при
постоянном моменте сопротивления  на валу можно получить различные
установившиеся угловые скорости ниже
основной. Жесткость механических
характеристик уменьшается с увеличением
величины добавочного сопротивления
на валу можно получить различные
установившиеся угловые скорости ниже
основной. Жесткость механических
характеристик уменьшается с увеличением
величины добавочного сопротивления .
Диапазон регулирования скорости не
превышает 2:1. Способ характеризуется
большими потерями электроэнергии на
добавочном сопротивлении
.
Диапазон регулирования скорости не
превышает 2:1. Способ характеризуется
большими потерями электроэнергии на
добавочном сопротивлении .
.
Лекция 2.3.Импульсный способ регулирования скорости исполнительных двигателей постоянного тока
Широтно-импульсный способ управления. Наиболее широкое применение из всех видов импульсного регулирования для управления двигателями постоянного тока нашло широтно-импульсное регулирование напряжения (ШИР).
 Рисунок
2.13
Рисунок
2.13
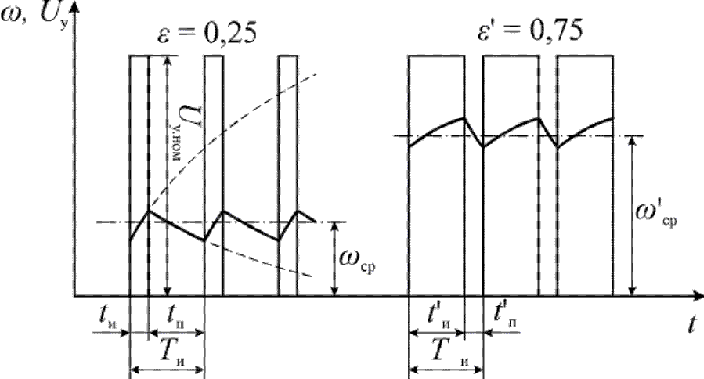
При импульсном способе (рис 2.13) к микродвигателю подводятся импульсы неизменного по амплитуде напряжения управления Uу.ном,в результате чего его работа состоит из чередующихся периодов разгона и торможения. Если эти периоды малы по сравнению с полным временем разгона и остановки ротора, то угловая скорость ротора не успевает к концу каждого периода достигать установившихся значений и установится некоторая средняя угловая скорость ωcp. Значение ωcp при неизменных моменте нагрузки и напряжении возбуждения однозначно определяется относительной продолжительностью импульсов ε:
ε=tи/Tи, (2.22)
где tи— длительность импульса; Ти — период.
С увеличением относительной продолжительности импульсов (рис.2.13, ε‘>ε) угловая скорость ротора растет ( ω’cp> ωcp).В период паузы tп ротор обязательно должен тормозиться. Если это условие не будет выполняться, то угловая скорость ротора при любом значении ? будет непрерывно увеличиваться, пока не достигнет значения угловой скорости х.х., так как во время импульса угловая скорость будет возрастать, а во время паузы – оставаться практически неизменной.
С ростом частоты управляющих импульсов амплитуда колебаний скорости уменьшается; среднее значение угловой скорости остается при этом неизменным.
Принципиальные схемы импульсного регулирования показаны на рис. 2.14.
 Рисунок
2.14
Рисунок
2.14
Если к валу двигателя приложен статический момент нагрузки, приводящий к механическому торможению двигателя во время паузы, то возможно применение схемы (рис.2.14,а), в которой ключ К в течение одной части цикла подключает якорь непосредственно к источнику питания, создавая положительный момент (разгон), в течение же другой части – отключает якорь от источника питания (торможение). Если двигатель работает без или с малой статической нагрузкой, то возможно применение электрического торможения (динамического или противовключением) во время паузы. Например, в схеме на рис. 2.14,б ключ К переключает во время паузы якорь на сопротивление Rд для осу¬ществления динамического торможения. В качестве ключевых элементов в современных схемах используются транзисторы или тиристоры; контактные электромагнитные реле, ввиду их низкого быстродействия, практически не применяются.
Рассмотрим механические и регулировочные характеристики исполнительного двигателя постоянного тока при импульсном управлении с торможением за счет статического момента сопротивления Mст на валу (рис.2.14,а). Под механической характеристикой при импульсном управлении понимают зависимость средней угловой скорости от среднего значения момента при неизменной относительной продолжительности импульсов ε. Под регулировочной характеристикой понимают зависимость средней угловой скорости ротора от относительной продолжительности импульсов ε при неизменном среднем моменте на валу двигателя.
В зависимости от параметров двигателя схемы управления и момента нагрузки возможны два основных режима работы двигателя: режим прерывистого тока и режим непрерывного тока.
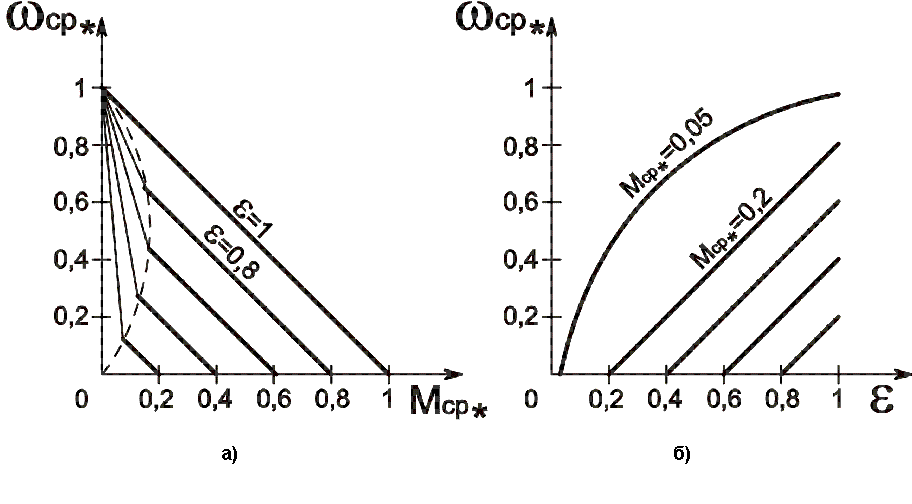
Режим прерывистого тока характеризуется тем, что ток якоря течет во время импульса, а в течение основного времени паузы tп равен нулю. Этот режим может возникнуть в схеме рис. 2.14,а при τя < Tи (τя-электромагнитная постоянная времени обмотки якоря). Уравнение механических и регулировочных характеристик в относительных единицах имеет вид
ωcp*=1 — Mcp*/ε , (2.23)
Механические характеристики – линейные и начинаются из одной общей точки х.х.; жесткость механических характеристик уменьшается при уменьшении ε. Регулировочные характеристики – нелинейные; регулирование возможно только при Mcp*!!=0.
Режим непрерывного тока характеризуется тем, что во время паузы tп уменьшающийся ток якоря iя продолжает протекать по якорю в том же направлении, что и во время tи.
Этот режим может возникнуть, например, при регулировании по схеме рис. 2.14,а при Tи << τя.При отключении ключа К (пауза tп) ток якоря начинает уменьшаться. Возникает ЭДС самоиндукции якоря, стремящаяся поддержать в цепи ток прежнего направления. Направление ЭДС самоиндукции такое, что диод Д оказывается открытым и через него замыкается цепь для тока якоря iя.
При малой амплитуде колебаний мгновенной угловой скорости ток якоря iя и момент Mэм меняются незначительно, и уравнение механических и регулировочных характеристик в относительных единицах имеет вид, аналогичный (2.7):
ωcp*=ε — Mcp* , (2.24)
Механические и регулировочные характеристики будут иметь такой же вид, как и при непрерывном якорном способе управления (см.рис. 2.7) с заменой α на ε. Как видно, закон регулирования угловой скорости в режиме непрерывного тока получается линейным.
В реальных схемах импульсного управления режим работы двигателя в одном диапазоне моментов и угловых скоростей ближе к режиму непрерывного тока, в другом – к режиму прерывистого тока.
Механические и регулировочные характеристики для этого случая представлены на рис. 2.15. Граница перехода из одного режима в другой показана пунктирной линией (механические характеристики,рис.2.15,а). С целью обеспечения линейности регулировочных характеристик (рис.2.15,б) диапазон прерывистых токов стремятся сузить.
 Рисунок
2.15
Рисунок
2.15
Основные преимущества импульсного способа управления – меньшее значение средней потребляемой двигателем мощности; возможность управления при нерегулируемом источнике постоянного тока, например, бортовой аккумуляторной батарее. Однако аппаратура управления в общем случае более сложная, чем при непрерывном управлении.
Система «Широтно-импульсный преобразователь – двигатель» (ШИП-Д)
 Рисунок
2.16
Рисунок
2.16
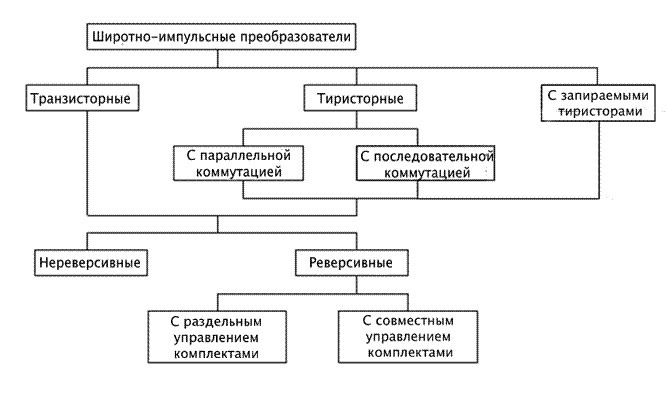
На рис.2.16 приведена классификация основных типов широтно-импульсных преобразователей. Широтно-импульсные преобразователи состоят из силовой части, выполняемой на транзисторах, тиристорах или запираемых тиристорах, и схемы управления; питаются они от сети постоянного тока.
На первых этапах применения полупроводниковых ШИП выбор транзисторной или тиристорной элементной базы основывался на следующих соображениях. Транзисторные ШИП имеют относительно малую мощность, невысокую перегрузочную способность по току (2-2,5 Iном), но позволяют реализовать частоту импульсов до 5 кГц. Тиристорные ШИП более мощные и лучше выдерживают перегрузки по току и напряжению, но позволяют работать с импульсами частотой не более 1 кГц и требуют более сложной схемы управления.
Однако в настоящее время подход к выбору силовой элементной базы ШИП несколько меняется, что объясняется двумя основными факторами. С одной стороны, созданы силовые модули на основе биполярных транзисторов с изолированным затвором, по мощности и перегрузочной способности практически не уступающие тиристорным и работающие на частотах до 10кГц. С другой стороны, в настоящее время все более широко выпускаются достаточно мощные запираемые тиристоры , которые в отличие от обычных тиристоров можно и закрыть подачей соответствующего потенциала на управляющий электрод.
Принцип работы транзисторного ШИП основан на использовании транзисторов в ключевом режиме: транзистор пропускает ток при подаче управляющего сигнала и перестает его пропускать после снятия сигнала.
Транзисторные ШИП в первом приближении можно считать идеальными звеньями с бесконечно малой инерционностью и бесконечно малым внутренним сопротивлением и для анализа систем ШИП-Д пользоваться выражениями механической характеритики и передаточной функции, полученной непосредственно для двигателя.
Принцип работы ШИП на запираемых тиристорах не имеет существенных отличий от работы транзисторного ШИП.
Принцип работы ШИП с обычными тиристорами в отличие от транзисторных имеет две основные особенности. Во-первых, в состав тиристорного ШИП входит схема искусственной коммутации, которая должна при питании тиристора от сети постоянного тока в требуемый момент времени изменить полярность на аноде и катоде и запереть тиристор. Связано это с тем, что тиристор после отпирания теряет управляемость и запереть его подачей сигнала на управляющий электрод невозможно. Во-вторых, запирание тиристора требует определенного времени, что не позволяет реализовать относительную продолжительность импульсов ε , достаточно близкую к нулю.
Системы с тиристорными ШИП.В схемах искусственной коммутации, которые подразделяются на схемы параллельного и поледовательного типов, для запирания тиристоров обычно используется заряд, накапливаемый конденсатором.
В схемах с параллельной коммутацией, один из вариантов которых показан на рис. 2.17,а, конденсатор С подключен непосредственно к основному тиристору Т1, который отпирается импульсами управления Uи1, следующими с требуемым периодом Ти. Конденсатор С заряжается через добавочное сопротивление Rg и открытый тиристор Т1 до напряжения Uc ≠ U .Для запирания тиристора Т1 – завершения подачи силового импульса на якорь двигателя Я, в момент времени tи подается управляющий импульс Uик на управляющий электрод вспомогательного тиристора Тк.
 Рисунок
2.17
Рисунок
2.17
Тиристор Тк отпирается, конденсатор С начинает разряжаться и напряжение Uc, приложенное к тиристору Т1 в запирающем для него направлении, запирает тиристор Т1. При спаде разрядного тока до значения, меньшего удерживающего тока тиристора, запирается и тиристор Тк.
В схемах с последовательной коммутацией, один из вариантов которых показан на рис. 2.17,б, последовательно с якорем двигателя и основным тиристором Т1 включен дроссель L. Коммутирующая цепь, состоящая из конденсатора С, дополнительного дросселя Lк и диода Дк, подключается к источнику постоянного тока с напряжением Uк !!<= U. Наличие в схеме колебательных контуров LC и LкС обеспечивает заряд конденсатора С до напряжения Uc>Uк.
При подаче управляющего импульса на вспомогательный тиристор Тк он открывается и возникает колебательный контур LC, в котором начинает протекать ток разряда конденсатора. В дросселе L возникает ЭДС самоиндукции, значение которой в первый момент времени равно Uc, а направление – противоположно току. Потенциал анода тиристора Т1 становится ниже потенциала катода, и тиристор запирается. Затем в результате колебательных процессов, происходящих в колебательных контурах LC и DкLкC, запирается тиристор Тк и заряжается конденсатор С.
Сравнение схем с параллельной и последовательной коммутацией показывает, что в схемах с последовательной коммутацией время запирания силовых тиристоров меньше за счет наличия колебательного контура. Однако наличие дросселя L в силовой цепи приводит, естественно, к росту постоянных времени системы ШИП-Д. Важным преимуществом схем с последовательной коммутацией является то, что заряд конденсатора происходит во время паузы в силовой цепи. Следовательно, длительность силового импульса tи можно снижать до значений, близких к нулю, не опасаясь того, что конденсатор не успеет зарядиться до требуемого напряжения. Это позволяет существенно расширить диапазон регулирования в область малых скоростей, вплоть до нуля. Выбор конкретной схемы зависит от требований к системе ШИП-Д.
Рассмотренные выше схемы ШИП были нереверсивными, реверсивные ШИП имеют двойной комплект ключевых элементов, включенных наиболее часто по мостовой схеме.
Особенности статических и динамических характеристик. Уравнение механических характеристик системы может быть получено на основе уравнений механических характеристик двигателя (2.4.) с учетом внутреннего сопротивления преобразователя Rшип.экв. Например, в режиме непрерывного тока уравнение будет иметь вид
 (2.25)
(2.25)
Передаточная функция системы ШИП-Д может быть получена на основе теории непрерывных систем автоматического управления, поскольку частота коммутации тиристоров обычно настолько велика, что пульсацией угловой скорости двигателя при анализе динамических процессов можно пренебречь.
Тиристорный ШИП можно рассматривать как усилительное звено с запаздыванием τзап , вносимым схемой управления ШИП. Тогда передаточная функция ШИП
 ,
(2.26)
,
(2.26)
где Кшип – коэффициент передачи ШИП, равный отношению приращений среднего напряжения на якоре Uя.ср и напряжения управления Uу на входе схемы управления ШИП.
Постоянные времени двигателя τ’м и τ’я должны учитывать эквивалентное активное сопротивление Rшип.экв и индуктивность L шип.эквпреобразователя, т.е. характеризуют динамические свойства двигателя в системе:
 (2.27).
(2.27).
В целом ряде практических случаев значением Rшип.экв можно пренебречь, а в L шип.экв учитывать только индуктивность дросселя L при последовательной коммутации.
Следует отметить, что в реальных схемах время запаздывания обычно невелико и в первом приближении им можно пренебречь. По сравнению с системой УВ-Д система ШИП-Д отличается более высоким быстродействием при широком диапазоне регулирования скорости.
Схемы управления ШИП. Схема управления ШИП вырабатывает и распределяет во времени последовательности импульсов для управления отпиранием и запиранием силовых тиристоров и транзисторов. Эта схема, позволяющая получить силовые импульсы требуемой длительности в зависимости от уровня напряжения управления при постоянном периоде следования импульсов, получила название широтно-импульсного модулятора (ШИМ). Работа ШИМ обычно основана либо на принципе сложения двух систем разнополярных импульсов прямоугольной формы с регулируемым фазовым сдвигом между системами импульсов, либо на сравнении периодически меняющегося, наиболее часто пилообразного опорного напряжения с сигналом управления. Последний принцип получил широкое распространение при управлении тиристорным ШИП.
2.2.2. Регулирование угловой скорости дпт нв введением добавочных сопротивлений в цепь якоря
Схема
подключения двигателя для этого способа
регулирования приведена на рис. 2.9, 2.10.
На якорь и обмотку возбуждения двигателя
подается номинальное напряжение: 
Электромеханическая
и механическая характеристики двигателя
описываются уравнениями (2.21), (2.22), в
которых принято  ,
,


О чевидно,
что первое слагаемое в этих уравнениях
чевидно,
что первое слагаемое в этих уравнениях остается неизменным, а второй член –
падение угловой скорости от нагрузки
тем больше, чем больше добавочное
сопротивление. Иными словами, с увеличением
остается неизменным, а второй член –
падение угловой скорости от нагрузки
тем больше, чем больше добавочное
сопротивление. Иными словами, с увеличением жесткость характеристик снижается (см.
рис. 2.12).
жесткость характеристик снижается (см.
рис. 2.12).
Если,
например, механизм имеет характеристику
с моментом  ,
не зависящим от скорости, то на
естественной характеристике угловая
скорость электропривода определяется
т.1 (см. рис. 2.12), а при введении добавочных
сопротивлений
,
не зависящим от скорости, то на
естественной характеристике угловая
скорость электропривода определяется
т.1 (см. рис. 2.12), а при введении добавочных
сопротивлений и
и снижается (т.2, т.3).Получаемые
при введении добавочных сопротивлений
характеристики называются искусственными
– реостатными.
снижается (т.2, т.3).Получаемые
при введении добавочных сопротивлений
характеристики называются искусственными
– реостатными.
Рассматриваемый
способ регулирования имеет ряд
существенных недостатков. Во-первых,
он не экономичен – часть энергии
подводимой от преобразователя теряется
в добавочном сопротивлении. Во-вторых,  регулируется ступенчато, что не всегда
удобно. В-третьих, при изменении момента
статического сопротивления угловая
скорость изменяется. Так, например, если
момент сопротивления механизма уменьшится
до
регулируется ступенчато, что не всегда
удобно. В-третьих, при изменении момента
статического сопротивления угловая
скорость изменяется. Так, например, если
момент сопротивления механизма уменьшится
до ,
(см. рис. 2.12), то угловая скорость
электропривода будет определиться т.т.
4, 5, 6.
,
(см. рис. 2.12), то угловая скорость
электропривода будет определиться т.т.
4, 5, 6.
Этот способ регулирования используется в основном для механизмов, не предъявляющих жестких требований и стабильности скорости. К ним относятся, в частности, грузоподъемные механизмы, устанавливаемые в цехах промышленных предприятий. Дополнительным обстоятельством, диктующим применение этого способа регулирования, является наличие сети постоянного тока, например, в автомобилях.
Кроме того, при использовании нерегулируемого источника или сети постоянного тока включение добавочных сопротивлений необходимо для обеспечения нормального пуска двигателя.
Рассмотрим особенности пускового режима. В начальный момент пуска угловая скорость и, соответственно, ЭДС двигателя равна нулю. Ток якоря при этом, как следует из уравнения (2.12), будет
Если не вводить добавочных сопротивлений, то ток ограничивается только сопротивлением якоря. Для двигателей мощностью больше 0,5…1,0 кВт бросок пускового тока, как правило, значительно превышает допустимое значение (обычно максимально допустимый ток ДПТ составляет 2,5…4 от номинального значения). Т.е. прямой пуск (подачей на якорь номинального напряжения) допустим только для двигателей небольшой мощности, с большим сопротивлением якоря.
Для более мощных двигателей с целью ограничения пускового тока в цепь якоря включаю добавочные сопротивления. Коммутацию добавочных сопротивлений обычно осуществляют с помощью контакторов (см. рис. 2.13). В начальный момент пуска на якорь двигателя контактом КМ1 подается напряжение, при этом величина добавочного сопротивления максимальна

Значение
максимального добавочного сопротивления
выбирают так, чтобы ток якоря не превысил
допустимого  (см.
рис. 2.14). Далее идет разгон по характеристике
с максимальным значением
(см.
рис. 2.14). Далее идет разгон по характеристике
с максимальным значением .
.
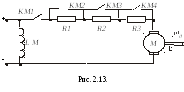
Ток якоря постепенно снижается за счет возрастания ЭДС. Обратите внимание, что напряжение на обмотку возбуждения подается до подключения якоря к сети. Пуск двигателя без подачи возбуждения недопустим – в этом случае момент двигателя и ЭДС будут равны нулю (см. выражения (2.13), (2.15)).
По
мере разгона двигателя и снижения тока
до некоторого значения  контактомКМ2 шунтируется резистор
контактомКМ2 шунтируется резистор  и машина переходит на характеристику
с
и машина переходит на характеристику
с ,
и т.д. до выхода на естественную
характеристику (процесс разгона на рис
2.14 условно показан стрелками). Добавочные
сопротивления подбирают так,
,
и т.д. до выхода на естественную
характеристику (процесс разгона на рис
2.14 условно показан стрелками). Добавочные
сопротивления подбирают так,
чтобы
переключения происходили при одних и
тех же значениях тока ( и
и ).
).
Процесс
разгона заканчивается установившимся
режимом в т. а, где момент двигателя уравновешивается
моментом сопротивления механизма  .
.
П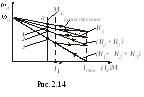 ри
автоматическом пуске переключение
контакторов осуществляется схемой
управления, обычно в функции времени.
Схема управления может предусматривать
длительную работу двигателя на любой
из характеристик, т.е. обеспечивать
ступенчатое регулирование угловой
скорости (т.т. 1, 2, 3, а на рис. 2.14).
ри
автоматическом пуске переключение
контакторов осуществляется схемой
управления, обычно в функции времени.
Схема управления может предусматривать
длительную работу двигателя на любой
из характеристик, т.е. обеспечивать
ступенчатое регулирование угловой
скорости (т.т. 1, 2, 3, а на рис. 2.14).