Регулятор оборотов электродвигателя 220 В без потери мощности: принцип работы, виды двигателей
 Каждый из нас дома имеет какой-то электроприбор, который работает в доме не один год. Но со временем мощность техники слабеет и не выполняет своих прямых предназначений. Именно тогда стоит обратить внимание на внутренности оборудования. В основном проблемы возникают с электродвигателем, который отвечает за функциональность техники. Тогда стоит обратить свое внимание на прибор, который регулирует обороты мощности двигателя без снижения их мощности.
Каждый из нас дома имеет какой-то электроприбор, который работает в доме не один год. Но со временем мощность техники слабеет и не выполняет своих прямых предназначений. Именно тогда стоит обратить внимание на внутренности оборудования. В основном проблемы возникают с электродвигателем, который отвечает за функциональность техники. Тогда стоит обратить свое внимание на прибор, который регулирует обороты мощности двигателя без снижения их мощности.
Виды двигателей
 Регулятор оборотов с поддержанием мощности — изобретение, которое вдохнет новую жизнь в электроприбор, и он будет работать как только что приобретенный товар
Регулятор оборотов с поддержанием мощности — изобретение, которое вдохнет новую жизнь в электроприбор, и он будет работать как только что приобретенный товар
Двигатели разные по характеристикам. Это значит то, что та или иная техника работает на разных частотах оборота вала, запускающего механизм. Мотор может быть:
- однофазным,
- двухфазным,
- трехфазным.
В основном трехфазные электромоторы встречаются на заводах или крупных фабриках. В домашних условиях используются однофазные и двухфазные. Данного электричества хватает на работу бытовой техники.
Регулятор оборотов мощности
Принципы работы
 Регулятор оборотов электродвигателя 220 В без потери мощности используется для поддержки первоначальной заданной частоты оборотов вала. Это один из основных принципов данного прибора, который называется частотным регулятором.
Регулятор оборотов электродвигателя 220 В без потери мощности используется для поддержки первоначальной заданной частоты оборотов вала. Это один из основных принципов данного прибора, который называется частотным регулятором.
С помощью него электроприбор работает в установленной частоте оборотов двигателя и не снижает ее. Также регулятор скорости двигателя влияет на охлаждение и вентиляцию мотора. C помощью мощности устанавливается скорость, которую можно как поднять, так и снизить.
Вопросом о том, как уменьшить обороты электродвигателя 220 В, задавались многие люди. Но данная процедура довольно проста. Стоит только изменить частоту питающего напряжения, что существенно снизит производительность вала мотора. Также можно изменить питание двигателя, задействуя при этом его катушки. Управление электричеством тесно связано с магнитным полем и скольжением электродвигателя. Для таких действий используют в основном автотрансформатор, бытовые регуляторы, которые уменьшают обороты данного механизма. Но стоит также помнить о том, что будет уменьшаться мощность двигателя.
Вращение вала
Двигатели делят на:
- асинхронные,
- коллекторные.
Регулятор скорости вращения асинхронного электродвигателя зависит от подключения тока к механизму. Суть работы асинхронного мотора зависит от магнитных катушек, через которые проходит рамка. Она поворачивается на скользящих контактах. И когда при повороте она развернется на 180 градусов, то по данным контактам связь потечет в обратном направлении. Таким образом, вращение останется неизменным. Но при этом действии нужный эффект не будет получен. Он войдет в силу после внесения в механизм пары десятков рамок данного типа.
 Коллекторный двигатель используется очень часто. Его работа проста, так как пропускаемый ток проходит напрямую — из-за этого не теряется мощность оборотов электродвигателя, и механизм потребляет меньше электричества.
Коллекторный двигатель используется очень часто. Его работа проста, так как пропускаемый ток проходит напрямую — из-за этого не теряется мощность оборотов электродвигателя, и механизм потребляет меньше электричества.
Двигатель стиральной машины также нуждается в регулировке мощности. Для этого были сделаны специальные платы, которые справляются со своей работой: плата регулировки оборотов двигателя от стиральной машины несет многофункциональное употребление, так как при ее применении снижается напряжение, но не теряется мощность вращения.
Схема данной платы проверена. Стоит только поставить мосты из диодов, подобрав оптрон для светодиода. При этом еще нужно поставить симистор на радиатор. В основном регулировка двигателя начинается от 1000 оборотов.
Если не устраивает регулятор мощности и не хватает его функциональности, можно сделать или усовершенствовать механизм
Далее стоит настроить регулятор и его частоту. При выходе данный импульс будет выходить через двухтактный усилитель на транзисторах. Также можно сделать 2 резистора, которые будут служить выходом для охладительной системы компьютера. Чтобы схема не сгорела, требуется специальный блокиратор, который будет служить удвоенным значением тока. Так данный механизм будет работать долго и в нужном объеме. Регулирующие приборы мощности обеспечат вашим электроприборам долгие годы службы без особых затрат.
изменение скорости вращения и схемы на тиристорах
 При пуске электродвигателя происходит превышение потребления тока в 7 раз, что способствует преждевременному выходу из строя электрической и механической частей мотора. Для предотвращения этого следует применять регулятор оборотов электродвигателя. Существует много моделей заводского плана, но для того чтобы сделать такое устройство самостоятельно, необходимо знать принцип действия электродвигателя и способы регулирования оборотов ротора.
При пуске электродвигателя происходит превышение потребления тока в 7 раз, что способствует преждевременному выходу из строя электрической и механической частей мотора. Для предотвращения этого следует применять регулятор оборотов электродвигателя. Существует много моделей заводского плана, но для того чтобы сделать такое устройство самостоятельно, необходимо знать принцип действия электродвигателя и способы регулирования оборотов ротора.
Общие сведения
Электродвигатели переменного тока получили широкое распространение во многих сферах жизнедеятельности человека, а именно — модели асинхронного типа. Основное назначение двигателя как электрической машины — трансформация электрической энергии в механическую. Асинхронный в переводе означает неодновременный, так как частота вращения ротора отличается от частоты переменного напряжения (U) в статоре. Существует две разновидности асинхронных двигателей по типу питания:
- Однофазные.
- Трехфазные.
Однофазные применяются для домашних бытовых нужд, а трехфазные используются на производстве. В трехфазных асинхронных двигателях (далее ТАД) используются два вида роторов:
- замкнутые;
- фазные.
Замкнутые составляют около 95% от всех применяемых двигателей и обладают значительной мощностью (от 250 Вт и выше). Фазный тип конструктивно отличается от АД, но применяется достаточно редко по сравнению с первым. Ротор представляет собой стальную фигуру цилиндрической формы, которая помещается внутрь статора, причем на его поверхность напрессован сердечник.
Короткозамкнутый и фазный роторы
Впаянные или залитые в поверхность сердечника и накоротко замкнутые с торцов двумя кольцами высокопроводящие медные (для машин большой мощности) или алюминиевые стержни (для машин меньшей мощности) играют роль электромагнитов с полюсами, обращенными к статору. Стержни обмотки не имеют какой-либо изоляции, так как напряжение в такой обмотке нулевое.
Более часто используемый для стержней двигателей средней мощности алюминий отличается малой плотностью и высокой электропроводностью.
Для уменьшения высших гармоник электродвижущей силы (ЭДС) и исключения пульсации магнитного поля стержни ротора имеют определенным образом рассчитанный угол наклона относительно оси вращения. Если используется электромотор маленькой мощности, то пазы представляют собой закрытые конструкции, которые отделяют ротор от зазора с целью увеличения индуктивной составляющей сопротивления.
Ротор в виде фазного исполнения или типа характеризуются обмоткой, концы ее соединены по типу «звезда» и присоединены к контактным кольцам (на валу), по которым скользят графитовые щетки. Для устранения вихревых токов поверхность обмоток покрывается оксидной пленкой. Кроме того, в цепь обмотки ротора добавляется резистор, позволяющий изменять активное сопротивление (R) роторной цепи для уменьшения значений пусковых токов (Iп). Пусковые токи отрицательно влияют на электрическую и механическую части электромотора. Переменные резисторы, используемые для регулирования Iп:
- Металлические или ступенчатые с ручным переключением.
- Жидкостные (за счет погружения на глубину электродов).
Щетки, выполненные из графита, изнашиваются, и некоторые модели оборудованы короткозамкнутым конструктивным исполнением, которое поднимает щетки и замыкает кольца после запуска мотора. АД с фазным ротором являются более гибкими в плане регулирования Iп.
Конструктивные особенности
Асинхронный двигатель не имеет выраженных полюсов в отличие от электромотора постоянного тока. Число полюсов определяется количеством катушек в обмотках неподвижной части (статор) и способом соединения. В асинхронной машине с 4-мя катушками проходит магнитный поток. Статор выполняется из листов спецстали (электротехническая сталь), сводящих к нулю вихревые токи, при которых происходит значительный нагрев обмоток. Он приводит к массовому межвитковому замыканию.

Железняк или сердечник ротора напрессовывается непосредственно на вал. Между ротором и статором существует минимальный воздушный зазор. Обмотка ротора выполняется в виде «беличьей клетки» и сделана из медных или алюминиевых стержней.
В электромоторах мощностью до 100 кВт применяется алюминий, обладающий незначительной плотностью — для заливки в пазы сердечника ротора. Но несмотря на такое устройство, двигатели этого типа греются. Для решения этой проблемы используются вентиляторы для принудительного охлаждения, которые насаживаются на вал. Эти двигатели просты и надежны. Однако двигатели потребляют при пуске большой ток, в 7 раз больше номинального. Из-за этого они имеют низкий пусковой момент, так как большая часть энергии электричества идет на нагрев обмоток.
Электромоторы, у которых повышенный момент пуска, отличаются от обыкновенных асинхронных конструкцией ротора. Ротор изготавливается в виде двойной «беличьей клетки». Эти модели имеют сходство с фазными типами изготовления ротора. Он состоит из внутренней и наружной «беличьих клеток», причем наружная является пусковой и обладает большим активным и малым реактивным R. Наружная обладает незначительным активным и высоким реактивным R. При увеличении частоты вращения I переключается на внутреннюю клетку и работает в виде короткозамкнутого ротора.
Принцип работы
При протекании I по статорной обмотке в каждой из них создается магнитный поток (Ф). Эти Ф сдвинуты на 120 градусов относительно друг друга. Полученный Ф является вращающимся, создающим электродвижущую силу (ЭДС) в алюминиевых или медных проводниках. В результате этого и создается пусковой магнитный момент электромотора, и ротор начинает вращаться. Этот процесс называется еще в некоторых источниках скольжением (S), показывающим разность частоты n1 электромагнитного поля стартера, которое становится больше, чем частота, полученная при вращении ротора n2. Вычисляется в процентах и имеет вид: S = ((n1-n2)/n1) * 100%.
 Значение S при начальном старте электромотора равно примерно 1, но при возрастании значений n2 становится меньше. В этот момент I в роторе уменьшается, следовательно, и ЭДС становится меньше номиналом. При холостом ходе S минимально, но при увеличении момента статического взаимодействия ротора и статора эта величина достигает критического значения. Если выполняется неравенство: S > Sкр, то мотор работает нормально, однако при превышении значения Sкр он может «опрокинуться». Опрокидывание вызывает нестабильную работу, но с течением времени исчезает.
Значение S при начальном старте электромотора равно примерно 1, но при возрастании значений n2 становится меньше. В этот момент I в роторе уменьшается, следовательно, и ЭДС становится меньше номиналом. При холостом ходе S минимально, но при увеличении момента статического взаимодействия ротора и статора эта величина достигает критического значения. Если выполняется неравенство: S > Sкр, то мотор работает нормально, однако при превышении значения Sкр он может «опрокинуться». Опрокидывание вызывает нестабильную работу, но с течением времени исчезает.
Методы настройки оборотов
Для предотвращения отрицательного влияния во время пуска нужно уменьшить обороты электродвигателя 220 в или 380 в. Существует несколько способов достижения этой цели:
- Изменение значения R цепи ротора.
- Изменение U в обмотке статора.
- Изменение частоты U.
- Переключение полюсов.
При изменении значения R роторной части при помощи дополнительных резисторов приводит к снижению частоты вращения, но в результате этого уменьшается мощность. Следовательно, получается значительная потеря электроэнергии. Этот тип регулирования следует применять для фазного ротора.
При изменении значений U на статорной катушке возможно механическое или электрическое управление частотой вращения ротора. В этом случае используется регулятор U. Использование такого способа позволяет применять его только при вентиляторном характере нагрузки (например, регулятор оборотов вентилятора 220в). Для всех остальных случаев применяют трехфазные автоматические трансформаторы, позволяющие плавно изменять значения U, или тиристорные регуляторы.
Исходя из формулы зависимости частоты вращения от частоты питающего U можно производить регулирование количества оборотов ротора. Частота вращающегося магнитного поля статора вычисляется по формуле: Nст = 60 * f /p (f — частота тока питающей сети, p — число пар полюсов). Этот способ обеспечивает возможность плавного регулирования частоты вращения роторной части. Для получения высокого коэффициента полезного действия нужно изменять частоту и U. Этот способ является оптимальным для двигателей с короткозамкнутым ротором, так как потери мощности минимальны. Существует два метода изменения количества пар полюсов:
- В статор (в пазы) нужно уложить 2 обмотки с различным числом p.
- Обмотка состоит из двух частей, соединенных параллельно или последовательно.
Основным недостатком этого метода является поддержание ступенчатого характера изменения частоты электромотора с короткозамкнутым ротором.
Виды и критерии выбора
Для выбора регулятора нужно руководствоваться определенными характеристиками для конкретного случая. Среди всех критериев можно выбрать следующие:
-
 По типу управления. Для двигателей коллекторного типа применяются регуляторы с векторной или скалярной системой управления.
По типу управления. Для двигателей коллекторного типа применяются регуляторы с векторной или скалярной системой управления. - Мощность является основным параметром, от которого нужно отталкиваться.
- По диапазону U.
- По диапазону частот. Нужно выбирать модель, которая соответствует требованиям пользователя для конкретного случая.
- Прочие характеристики, в которые включены гарантия, габариты, комплектация.

Кроме того, регулятор подбирается мощнее, чем сам электродвигатель по формуле: Pрег = 1,3 * Pдвиг (Pрег, Pдвиг — мощность регулятора и двигателя соответственно). Его нужно выбирать на разные диапазоны U, так как универсальность играет важную роль.
Устройство на тиристорах
В этой модели, представленной на схеме 1, применяются 2 тиристора, включенных встречно-параллельно, хотя их можно заменить одним симистором.

Схема 1 — Тиристорная регулировка оборотов коллекторного двигателя без потери мощности.
Эта схема производит регулирование с помощью открытия или закрытия тиристоров (симистора) при фазовом переходе через нейтраль. Для корректного управления коллекторным двигателем применяют следующие способы модификации схемы 1:
- Установка защитных LRC-цепей, состоящих из конденсаторов, резисторов и дросселей.
- Добавление на входе емкости.
- Использование тиристоров или симистора, ток которых превышает номинальное значение силы тока двигателя в диапазоне от 3..8 раз.
Этот тип регуляторов имеет достоинства и недостатки. К первым относятся низкая стоимость, маленький вес и габариты. Ко вторым следует отнести следующие:
- применение для моторов небольшой мощности;
- происходит шум и рывки мотора;
- при использовании схемы на симисторах происходит попадание постоянного U на двигатель.
Этот тип регулятора ставится в вентиляторы, кондиционеры, стиральные машины и электродрели . Отлично выполняет свои функции, несмотря на недостатки.
Транзисторный тип
Еще одним названием регулятора транзисторного типа является автотрансформатор или ШИМ-регулятор (схема 2). Он изменяет номинал U по принципу широтно-импульсной модуляции (ШИМ) при помощи выходного каскада, в котором применяются транзисторы типа IGBT.

Схема 2 — Транзисторный ШИМ-регулятор оборотов.
Коммутация транзисторов происходит с высокой частотой и благодаря этому можно изменить ширину импульсов. Следовательно, при этом изменится и значение U. Чем длиннее импульс и короче паузы, тем выше значение U и наоборот. Положительные аспекты применения этой разновидности следующие:
- Незначительный вес прибора при низких габаритах.
- Довольно низкая стоимость.
- При низких оборотах отсутствие шума.
- Управление за счет низких значений U (0..12 В).
Основной недостаток применения заключается в том, что расстояние до электромотора должно быть не более 4 метров.
Регулирование за счет частоты
 Регулирование оборотов моторов различных типов за счет частоты получило широкое применение. Частотное преобразование занимает лидирующую позицию на рынке сбыта устройств-регуляторов оборотов и осуществления плавного пуска. Благодаря своей универсальности возможно влиять на мощность, производительность и скорость любого устройства с электродвигателем. Эти устройства применяются для однофазных и трехфазных двигателей. Применяются такие виды частотных преобразователей:
Регулирование оборотов моторов различных типов за счет частоты получило широкое применение. Частотное преобразование занимает лидирующую позицию на рынке сбыта устройств-регуляторов оборотов и осуществления плавного пуска. Благодаря своей универсальности возможно влиять на мощность, производительность и скорость любого устройства с электродвигателем. Эти устройства применяются для однофазных и трехфазных двигателей. Применяются такие виды частотных преобразователей:
- Специализированные однофазные.
- Трехфазные без конденсатора.
Для регулирования оборотов используется конденсатор, включенный с обмотками однофазного двигателя (схема 3). Этот преобразователь частоты (ПЧ) имеет емкостное R, которое зависит от частоты протекающего переменного тока. Выходной каскад такого ПЧ выполнен на IGBT-транзисторах.

Схема 3 — Частотный регулятор оборотов.
У специализированного ПЧ есть свои преимущества и недостатки. Преимуществами являются следующие:
- Управление АД без участия человека.
- Стабильность.
- Дополнительные возможности.
Существует возможность управлять работой электромотора при определенных условиях, а также защита от перегрузок и токов КЗ. Кроме того, возможно расширять функционал при помощи подключения цифровых датчиков, мониторинга параметров работы и использования PID-регулятора. К минусам можно отнести ограничения при управлении частотой и довольно высокую стоимость.
Для трехфазных АД применяются также устройства регулирования частоты (схема 4). Регулятор имеет на выходе три фазы для подключения электромотора.

Схема 4 — ПЧ для трехфазного двигателя.
У этого варианта тоже есть свои сильные и слабые стороны. К первым можно отнести следующие: низкую стоимость, выбор мощности, широкий диапазон частотной регуляции, а также все преимущества однофазных преобразователей частоты. Среди всех отрицательных сторон можно выделить основные: предварительный подбор и нагрев при пуске.
Изготовление своими руками
Если нет возможности, а также желания приобретать регулятор заводского типа, то можно собрать его своими руками. Хотя регуляторы типа » tda1085 » зарекомендовали себя очень хорошо. Для этого нужно детально ознакомиться с теорией и приступить к практике. Очень популярны схемы симисторного исполнения, в частности регулятор оборотов асинхронного двигателя 220в (схема 5). Сделать его несложно. Он собирается на симисторе ВТ138, хорошо подходящем для этих целей.

Схема 5 — Простой регулятор оборотов на симисторе.
Этот регулятор может быть использован и для регулировки оборотов двигателя постоянного тока 12 вольт, так как является довольно простым и универсальным. Обороты регулируются благодаря изменению параметров Р1, определяющему фазу входящего сигнала, который открывает переход симистора.
Принцип работы прост. При запуске двигателя происходит его затормаживание, индуктивность изменятся в меньшую сторону и способствует увеличению U в цепи «R2—>P1—>C2». При разряде С2 симистор открывается в течение некоторого времени.
Существует еще одна схема. Она работает немного по-другому: путем обеспечения хода энергии обратного типа, которое является оптимально выгодным. В схему включен довольно мощный тиристор.

Схема 6 — Устройство тиристорного регулятора.
Схема состоит из генератора сигнала управления, усилителя, тиристора и участка цепи, выполняющего функции стабилизатора вращения ротора.
Наиболее универсальной схемой является регулятор на симисторе и динисторе (схема 7). Он способен плавно убавить скорость вращения вала, задать реверс двигателю (изменить направление вращения) и понизить пусковой ток.

Принцип работы схемы:
- С1 заряжается до U пробоя динистора D1 через R2.
- D1 при пробитии открывает переход симистора D2, который отвечает за управление нагрузкой.
Напряжение при нагрузке прямо пропорционально зависит от частотной составляющей при открытии D2, зависящего от R2. Схема применяется в пылесосах. Она содержит универсальное электронное управление, а также способность простого подключения питания 380 В. Все детали следует расположить на печатной плате, изготовленной по лазерно-утюжной технологии (ЛУТ). Подробно с этой технологии изготовления плат можно ознакомиться в интернете.
Таким образом, при выборе регулятора оборотов электродвигателя возможна покупка заводского или изготовление своими руками. Самодельный регулятор сделать достаточно просто, так как при понимании принципа действия устройства можно с легкостью собрать его. Кроме того, следует соблюдать правила безопасности при осуществлении монтажа деталей и при работе с электричеством.
Оцените статью: Поделитесь с друзьями!Регулировка оборотов асинхронного двигателя своими руками (схема, видео)
Достаточно часто режим работы вспомогательного механизированного оборудования требует понижения штатных частот вращения. Добиться такого эффекта позволяет регулировка оборотов асинхронного двигателя. Как это сделать своими руками (расчет и сборку), используя стандартные схемы управления или самодельные устройства, попробуем разобраться далее.
Что такое асинхронный двигатель?
Электродвигатели переменного тока нашли довольно широкое применение в различных сферах нашей жизнедеятельности, в подъемно транспортном, обрабатывающем, измерительном оборудовании. Они используются для превращения электрической энергии, которая поступает от сети, в механическую энергию вращающегося вала. Чаще всего используются именно асинхронные преобразователи переменного тока. В них частота вращения ротора и статора отличаются. Между этими активными элементами обеспечивается конструктивный воздушный зазор.
И статор, и ротор имеют жесткий сердечник из электротехнической стали (наборного типа, из пластин), выступающий в роли магнитопровода, а также обмотку, которая укладывается в конструктивные пазы сердечника. Именно способ организации или укладки обмотки ротора является ключевым критерием классификации этих машин.
Двигатели с короткозамкнутым ротором (АДКР)
Здесь используется обмотка в виде алюминиевых, медных или латунных стержней, которые вставляются в пазы сердечника и с обеих сторон замыкаются дисками (кольцами). Тип соединения этих элементов зависит от мощности двигателя: для малых значений используют метод совместной отливки дисков и стержней, а для больших – раздельное изготовление с последующей сваркой между собой. Обмотка статора подключается с использованием схем «треугольника» или «звезды».

Двигатели с фазным ротором
К сети подключается трехфазная обмотка ротора, посредством контактных колец на основном валу и щеток. За основу принимается схема «звезда». На рисунке внизу представлена типичная конструкция такого двигателя.

Принцип работы и число оборотов асинхронных двигателей
Данный вопрос рассмотрим на примере АДКР, как наиболее распространенного типа электродвигателей подъемно-транспортном и обрабатывающем оборудовании. Напряжение от сети подается на обмотку статора, каждая из трех фаз которой смещена геометрически на 120°. После подачи напряжения возникает магнитное поле, создающее путем индукции ЭДС и ток в обмотках ротора. Последнее вызывает электромагнитные силы, заставляющие ротор вращаться. Еще одна причина, по которой все это происходит, а именно, возникает ЭДС, является разность оборотов статора и ротора.
Одной из ключевых характеристик любого АДКР является частота вращения, расчет которой можно вести по следующей зависимости:
n = 60f / p, об/мин
где f – частота сетевого напряжения, Гц, р – число полюсных пар статора.
Все технические характеристики указываются на металлической табличке, закрепленной на корпусе. Но если она отсутствует по какой-то причине, то определить число оборотов нужно вручную по косвенным показателям. Как правило, используется три основных метода:
- Расчет количества катушек. Полученное значение сопоставляется с действующими нормами для напряжения 220 и 380В (см. табл. ниже),
Наши читатели рекомендуют! Для экономии на платежах за электроэнергию наши читатели советуют ‘Экономитель энергии Electricity Saving Box’. Ежемесячные платежи станут на 30-50% меньше, чем были до использования экономителя. Он убирает реактивную составляющую из сети, в результате чего снижается нагрузка и, как следствие, ток потребления. Электроприборы потребляют меньше электроэнергии, снижаются затраты на ее оплату.

- Расчет оборотов с учетом диаметрального шага обмотки. Для определения используется формула вида:
2p = Z1 / y,
где 2p – число полюсов, Z1 – количество пазов в сердечнике статора, y – собственно, шаг укладки обмотки.
Стандартные значения оборотов:

- Расчет числа полюсов по сердечнику статора. Используются математические формулы, где учитываются геометрические параметры изделия:
2p = 0,35Z1b / h или 2p = 0,5Di / h,
где 2p – число полюсов, Z1 – количество пазов в статоре, b – ширина зубца, см, h – высота спинки, см, Di – внутренний диаметр, образованный зубцами сердечника, см.
После этого по полученным данным и магнитной индукции нужно определить количество витков, которое сверяется с паспортными данными двигателей.
Способы изменения оборотов двигателя
Регулировка оборотов любого трехфазного электродвигателя, используемого в подъемно-транспортной технике и оборудовании, позволяет добиться требуемых режимов работы точно и плавно, что далеко не всегда возможно, например, за счет механических редукторов. На практике используется семь основных методов коррекции скорости вращения, которые делятся на два ключевых направления:
- Изменение скорости магнитного поля в статоре. Достигается за счет частотного регулирования, переключения числа полюсных пар или коррекции напряжения. Следует добавить, что эти методы применимы для электродвигателей с короткозамкнутым ротором,
- Изменение величины скольжения. Этот параметр можно откорректировать за счет питающего напряжения, подключения дополнительного сопротивления в электрическую цепь ротора, применения вентильного каскада или двойного питания. Используется для моделей с фазным ротором.
Наиболее востребованными методами являются регулирование напряжения и частоты (за счет применения преобразователей), а также изменение количества полюсных пар (реализуется путем организации дополнительной обмотки с возможностью переключения).
Типичные схемы регуляторов оборотов
На рынке сегодня есть широкий выбор регуляторов и частотных преобразователей для асинхронных двигателей. Тем не менее, для бытовых нужд подъемного или обрабатывающего оборудования вполне можно сделать расчет и сборку на микросхеме самодельного прибора на базе тиристоров или мощных транзисторов.
Ниже представлен пример схемы достаточно мощного регулятора для асинхронного двигателя. За счет чего можно добиться плавного контроля параметров его работы, снижения энергопотребления до 50%, расходов на техническое обслуживание.

Данная схема является сложной. Для бытовых нужд ее можно значительно упростить, используя в качестве рабочего элемента симистор, например, ВТ138-600. В этом случае схема будет выглядеть следующим образом:

Обороты электродвигателя будут регулироваться за счет потенциометра, который определяет фазу входного импульса, открывающего симистор.
Как можно судить из информации, представленной выше, от оборотов асинхронного двигателя зависят не только параметры его работы, но и эффективность функционирования питаемого подъемного или обрабатывающего оборудования. В торговой сети сегодня можно приобрести самые разнообразные регуляторы, но также можно совершить расчет и собрать эффективное устройство своими руками.
Плавная регулировка оборотов электродвигателя
Плавная работа двигателя, без рывков и скачков мощности – это залог его долговечности. Для контроля этих показателей используется регулятор оборотов электродвигателя на 220В, 12 В и 24 В, все эти частотники можно изготовить своими руками или купить уже готовый агрегат.
Зачем нужен регулятор оборотов
Регулятор оборотов двигателя, частотный преобразователь – это прибор на мощном транзисторе, который необходим для того, чтобы инвертировать напряжение, а также обеспечить плавную остановку и пуск асинхронного двигателя при помощи ШИМ. ШИМ – широко-импульсное управление электрическими приспособлениями. Его применяют для создания определенной синусоиды переменного и постоянного тока.
 Фото — мощный регулятор для асинхронного двигателя
Фото — мощный регулятор для асинхронного двигателя
Самый простой пример преобразователя – это обычный стабилизатор напряжения. Но у обсуждаемого прибора гораздо больший спектр работы и мощность.
Частотные преобразователи используются в любом устройстве, которое питается от электрической энергии. Регуляторы обеспечивают чрезвычайно точный электрический моторный контроль, так что скорость двигателя можно изменять в меньшую или большую сторону, поддерживать обороты на нужном уровне и защищать приборы от резких оборотов. При этом электродвигателем используется только энергия, необходимая для работы, вместо того, чтобы запускать его на полной мощности.
 Фото — регулятор оборотов двигателя постоянного тока
Фото — регулятор оборотов двигателя постоянного тока
Зачем нужен регулятор оборотов асинхронного электродвигателя:
- Для экономии электроэнергии. Контролируя скорость мотора, плавность его пуска и остановки, силы и частоты оборотов, можно добиться значительной экономии личных средств. В качестве примера, снижение скорости на 20% может дать экономию энергии в размере 50%.
- Преобразователь частоты может использоваться для контроля температуры процесса, давления или без использования отдельного контроллера;
- Не требуется дополнительного контроллера для плавного пуска;
- Значительно снижаются расходы на техническое обслуживание.
Устройство часто используется для сварочного аппарата (в основном для полуавтоматов), электрической печки, ряда бытовых приборов (пылесоса, швейной машинки, радио, стиральной машины), домашнего отопителя, различных судомоделей и т.д.
![]() Фото — шим контроллер оборотов
Фото — шим контроллер оборотов
Принцип работы регулятора оборотов
Регулятор оборотов представляет собой устройство, состоящее из следующих трех основных подсистем:
- Двигателя переменного тока;
- Главного контроллера привода;
- Привода и дополнительных деталей.
Когда двигатель переменного тока запускается на полную мощность, происходит передача тока с полной мощностью нагрузки, такое повторяется 7-8 раз. Этот ток сгибает обмотки двигателя и вырабатывает тепло, которое будет выделяться продолжительное время. Это может значительно снизить долговечность двигателя. Иными словами, преобразователь – это своеобразный ступенчатый инвертор, который обеспечивает двойное преобразование энергии.
 Фото — схема регулятора для коллекторного двигателя
Фото — схема регулятора для коллекторного двигателя
В зависимости от входящего напряжения, частотный регулятор числа оборотов трехфазного или однофазного электродвигателя, происходит выпрямление тока 220 или 380 вольт. Это действие осуществляется при помощи выпрямляющего диода, который расположен на входе энергии. Далее ток проходит фильтрацию при помощи конденсаторов. Далее формируется ШИМ, за это отвечает электросхема. Теперь обмотки асинхронного электродвигателя готовы к передаче импульсного сигнала и их интеграции к нужной синусоиде. Даже у микроэлектродвигателя эти сигналы выдаются, в прямом смысле слова, пачками.
Как выбрать регулятор
Существует несколько характеристик, по которым нужно выбирать регулятор оборотов для автомобиля, станочного электродвигателя, бытовых нужд:
- Тип управления. Для коллекторного электродвигателя бывают регуляторы с векторной или скалярной системой управления. Первые чаще применяются, но вторые считаются более надежными;
- Мощность. Это один из самых важных факторов для выбора электрического преобразователя частот. Нужно подбирать частотник с мощностью, которая соответствует максимально допустимой на предохраняемом приборе. Но для низковольтного двигатель лучше подобрать регулятор мощнее, чем допустимая величина Ватт;
- Напряжение. Естественно, здесь все индивидуально, но по возможности нужно купить регулятор оборотов для электродвигателя, у которого принципиальная схема имеет широкий диапазон допустимых напряжений;
- Диапазон частот. Преобразование частоты – это основная задача данного прибора, поэтому старайтесь выбрать модель, которая будет максимально соответствовать Вашим потребностям. Скажем, для ручного фрезера будет достаточно 1000 Герц;
- По прочим характеристикам. Это срок гарантии, количество входов, размер (для настольных станков и ручных инструментов есть специальная приставка).
Хорошо себя зарекомендовали приборы марки Sinus, E-Sky и Pic.
При этом также нужно понимать, что есть так называемый универсальный регулятор вращения. Это частотный преобразователь для бесколлекторных двигателей.
 Фото — схема регулятора для бесколлекторных двигателей
Фото — схема регулятора для бесколлекторных двигателей
В данной схеме есть две части – одна логическая, где на микросхеме расположен микроконтроллер, а вторая – силовая. В основном такая электрическая схема используется для мощного электрического двигателя.
Видео: регулятор оборотов электродвигателя с ШИро V2
Как сделать самодельный регулятор оборотов двигателя
Можно сделать простой симисторный регулятор оборотов электродвигателя, его схема представлена ниже, а цена состоит только из деталей, продающихся в любом магазине электротехники.
Для работы нам понадобится мощный симистор типа BT138-600, её советует журнал радиотехники.
 Фото — схема регулятора оборотов своими руками
Фото — схема регулятора оборотов своими руками
В описанной схеме, обороты будут регулироваться при помощи потенциометра P1. Параметром P1 определяется фаза входящего импульсного сигнала, который в свою очередь открывает симистор. Такая схема может применяться как в полевом хозяйстве, так и в домашнем. Можно использовать данный регулятор для швейных машинок, вентиляторов, настольных сверлильных станков.
Принцип работы прост: в момент, когда двигатель немного затормаживается, его индуктивность падает, и это увеличивает напряжение в R2-P1 и C3, то в свою очередь влечет более продолжительное открытие симистора.
Тиристорный регулятор с обратной связью работает немного по-другому. Он обеспечивает обратный ход энергии в энергетическую систему, что является очень экономным и выгодным. Данный электронный прибор подразумевает включение в электрическую схемы мощного тиристора. Его схема выглядит вот так:

Здесь для подачи постоянного тока и выпрямления требуется генератор управляющего сигнала, усилитель, тиристор, цепь стабилизации оборотов.
 Регулятор оборотов в двигателе нужен для совершения плавного разгона и торможения. Широкое распространение получили такие приборы в современной промышленности. Благодаря им происходит измерение скорости движения в конвейере, на различных устройствах, а также при вращении вентилятора. Двигатели с производительностью на 12 Вольт применяются в целых системах управления и в автомобилях.
Регулятор оборотов в двигателе нужен для совершения плавного разгона и торможения. Широкое распространение получили такие приборы в современной промышленности. Благодаря им происходит измерение скорости движения в конвейере, на различных устройствах, а также при вращении вентилятора. Двигатели с производительностью на 12 Вольт применяются в целых системах управления и в автомобилях.
Устройство системы
Коллекторный тип двигателя состоит главным образом из ротора, статора, а также щёток и тахогенератора.
- Ротор — это часть вращения, статор — это внешний по типу магнит.
- Щётки, которые произведены из графита — это главная часть скользящего контакта, через которую на вращающийся якорь и стоит подавать напряжение.
- Тахогенератор —это устройство, которое производит слежку за характеристикой вращения прибора. Если происходит нарушение в размеренности процесса вращения, то он корректирует поступающий в двигатель уровень напряжения, тем самым делая его наиболее плавным и медленным.
- Статор. Такая деталь может включать в себя не один магнит, а, к примеру, две пары полюсов. Вместе с этим на месте статических магнитов здесь будут находиться катушки электромагнитов. Совершать работу такое устройство способно как от постоянного тока, так и от переменного.
Схема регулятора оборотов коллекторного двигателя
 В виде регуляторов оборотов электродвигателей 220 В и 380 В применяются особые частотные преобразователи. Такие устройства относят к высокотехнологическим, они и помогают совершить кардинальное преобразование характеристики тока (форму сигнала, а также частоту). В их комплектации имеются мощные полупроводниковые транзисторы, а также широтно-импульсный модулятор. Весь процесс осуществления работы устройства происходит с помощью управления специальным блоком на микроконтроллере. Изменение скорости во вращении ротора двигателей происходит довольно медленно.
В виде регуляторов оборотов электродвигателей 220 В и 380 В применяются особые частотные преобразователи. Такие устройства относят к высокотехнологическим, они и помогают совершить кардинальное преобразование характеристики тока (форму сигнала, а также частоту). В их комплектации имеются мощные полупроводниковые транзисторы, а также широтно-импульсный модулятор. Весь процесс осуществления работы устройства происходит с помощью управления специальным блоком на микроконтроллере. Изменение скорости во вращении ротора двигателей происходит довольно медленно.
Именно по этой причине частотные преобразователи применяются в нагруженных устройствах. Чем медленнее будет происходить процесс разгона, тем меньшая нагрузка будет совершена на редуктор, а также конвейер. Во всех частотниках можно найти несколько степеней защиты: по нагрузке, току, напряжению и другим показателям.
Некоторые модели частотных преобразователей совершают питание от однофазового напряжения (оно будет доходить до 220 Вольт), создают из него трехфазовое. Это помогает совершить подключение асинхронного мотора в домашних условиях без применения особо сложных схем и конструкций. При этом потребитель сможет не потерять мощность во время работы с таким прибором.
Зачем используют такой прибор-регулятор
Если говорить про двигатели регуляторов, то обороты нужны:
- Для существенной экономии электроэнергии. Так, не любому механизму нужно много энергии для выполнения работы вращения мотора, в некоторых случаях можно уменьшить вращение на 20−30 процентов, что поможет значительно сократить расходы на электроэнергию сразу в несколько раз.
- Для защиты всех механизмов, а также электронных типов цепей. При помощи преобразовательной частоты можно осуществлять определённый контроль за общей температурой, давлением, а также другими показателями прибора. В случае когда двигатель работает в виде определённого насоса, то в ёмкости, в которую совершается накачка воздуха либо жидкости, стоит вводить определённый датчик давления. Во время достижения максимальной отметки мотор попросту автоматически закончит свою работу.
- Для процесса плавного запуска. Нет особой необходимости применять дополнительные электронные виды оборудования — все можно осуществить при помощи изменения в настройках частотного преобразователя.
- Для снижения уровня расходов на обслуживание устройств. С помощью таких регуляторов оборотов в двигателях 220 В можно значительно уменьшить возможность выхода из строя приборов, а также отдельных типов механизмов.
 Для процесса плавного запуска. Нет особой необходимости применять дополнительные электронные виды оборудования — все можно осуществить при помощи изменения в настройках частотного преобразователя.
Для процесса плавного запуска. Нет особой необходимости применять дополнительные электронные виды оборудования — все можно осуществить при помощи изменения в настройках частотного преобразователя.Схемы, по которым происходит создание частотных преобразователей в электродвигателе, широко используются в большинстве бытовых устройств. Такую систему можно найти в источниках беспроводного питания, сварочных аппаратах, зарядках телефона, блоках питания персонального компьютера и ноутбука, стабилизаторах напряжения, блоках розжига ламп для подсветки современных мониторов, а также ЖК-телевизоров.
Регулятор оборотов электродвигателя 220в
Его можно изготовить совершенно самостоятельно, но для этого нужно будет изучить все возможные технические особенности прибора. По конструкции можно выделить сразу несколько разновидностей главных деталей. А именно:
- Сам электродвигатель.
- Микроконтроллерная система управления блока преобразования.
- Привод и механические детали, которые связаны с работой системы.
 Перед самым началом запуска устройства, после подачи определённого напряжения на обмотки, начинается процесс вращения двигателя с максимальным показателем мощности. Именно такая особенность и будет отличать асинхронные устройства от остальных видов. Ко всему прочему происходит прибавление нагрузки от механизмов, которые приводят прибор в движение. В конечном счёте на начальном этапе работы устройства мощность, а также потребляемый ток лишь возрастают до максимальной отметки.
Перед самым началом запуска устройства, после подачи определённого напряжения на обмотки, начинается процесс вращения двигателя с максимальным показателем мощности. Именно такая особенность и будет отличать асинхронные устройства от остальных видов. Ко всему прочему происходит прибавление нагрузки от механизмов, которые приводят прибор в движение. В конечном счёте на начальном этапе работы устройства мощность, а также потребляемый ток лишь возрастают до максимальной отметки.
В это время происходит процесс выделения наибольшего количества тепла. Происходит перегрев в обмотках, а также в проводах. Использование частичного преобразования поможет не допустить этого. Если произвести установку плавного пуска, то до максимальной отметки скорости (которая также может регулироваться оборудованием и может быть не 1500 оборотов за минуту, а всего лишь 1000) двигатель начнёт разгоняться не в первый момент работы, а на протяжении последующих 10 секунд (при этом на каждую секунду устройство будет прибавлять по 100−150 оборотов). В это время процесс нагрузки на все механизмы и провода начинает уменьшаться в несколько раз.
Как сделать регулятор своими руками
Можно совершенно самостоятельно создать регулятор оборотов электродвигателя около 12 В. Для этого стоит использовать переключатель сразу нескольких положений, а также специальный проволочный резистор. При помощи последнего происходит изменение уровня напряжения питания (а вместе с этим и показателя частоты вращения). Такие же системы можно применять и для совершения асинхронных движений, но они будут менее эффективными.
Ещё много лет назад широко использовались механические регуляторы — они были построены на основе шестеренчатых приводов или же их вариаторов. Но такие устройства считались не очень надёжными. Электронные средства показывали себя в несколько раз лучше, так как они были не такими большими и позволяли совершать настройку более тонкого привода.
Для того чтобы создать регулятор вращения электродвигателя, стоит использовать сразу несколько устройств, которые можно либо купить в любом строительном магазине, либо снять со старых инвенторных устройств. Чтобы совершить процесс регулировки, стоит включить специальную схему переменного резистора. С его помощью происходит процесс изменения амплитуды входящего на резистор сигнала.
Внедрение системы управления
 Чтобы значительно улучшить характеристику даже самого простого оборудования, стоит в схему регулятора оборотов двигателя подключить микроконтроллерное управление. Для этого стоит выбрать тот процессор, в котором есть подходящее количество входов и выходов соответственно: для совершения подключения датчиков, кнопок, а также специальных электронных ключей.
Чтобы значительно улучшить характеристику даже самого простого оборудования, стоит в схему регулятора оборотов двигателя подключить микроконтроллерное управление. Для этого стоит выбрать тот процессор, в котором есть подходящее количество входов и выходов соответственно: для совершения подключения датчиков, кнопок, а также специальных электронных ключей.
Для осуществления экспериментов стоит использовать особенный микроконтроллер AtMega 128 — это наиболее простой в применении и широко используемый контроллер. В свободном использовании можно найти большое число схем с его применением. Чтобы устройство совершало правильную работу, в него стоит записать определённый алгоритм действий — отклики на определённые движения. К примеру, при достижении температуры в 60 градусов Цельсия (замер будет отмечаться на графике самого устройства), должно произойти автоматическое отключение работы устройства.
Регулировка работы
Теперь стоит поговорить о том, как можно осуществить регулировку оборотов в коллекторном двигателе. В связи с тем, что общая скорость вращения мотора может напрямую зависеть от величины подаваемого уровня напряжения, для этого вполне пригодны совершенно любые системы для регулировки, которые могут осуществлять такую функцию.
Стоит перечислить несколько разновидностей приборов:
- Лабораторные автотрансформеры (ЛАТР).
- Заводские платы регулировки, которые применяются в бытовых устройствах (можно взять даже те, которые используются в пылесосах, миксерах).
- Кнопки, которые применяются в конструкции электроинструментов.
- Бытовые разновидности регуляторов, которые оснащены особым плавным действием.
 Но при этом все такие способы имеют определённый изъян. Совместно с процессами уменьшения оборотов уменьшается и общая мощность работы мотора. Иногда его можно остановить, даже просто дотронувшись рукой. В некоторых случаях это может быть вполне нормальным, но по большей части это считается серьёзной проблемой.
Но при этом все такие способы имеют определённый изъян. Совместно с процессами уменьшения оборотов уменьшается и общая мощность работы мотора. Иногда его можно остановить, даже просто дотронувшись рукой. В некоторых случаях это может быть вполне нормальным, но по большей части это считается серьёзной проблемой.
Наиболее приемлемым вариантом станет выполнение функции регулировки оборотов при помощи применения тахогенератора.
Его чаще всего устанавливают на заводе. Во время отклонения скорости вращения моторов через симистры в моторе будет происходить передача уже откорректированного электропитания, сопутствующего нужной скорости вращения. Если в такую ёмкость будет встроена регулировка вращения самого мотора, то мощность не будет потеряна.
Как же это выглядит в виде конструкции? Больше всего используется именно реостатная регулировка процесса вращения, которая создана на основе применения полупроводника.
В первом случае речь пойдёт о переменном сопротивлении с использованием механического процесса регулировки. Она будет последовательно подключена к коллекторному электродвигателю. Недостатком в этом случае станет дополнительное выделение некоторого количества тепла и дополнительная трата ресурса всего аккумулятора. Во время такой регулировки происходит общая потеря мощности в процессе совершения вращения мотора. Он считается наиболее экономичным вариантом. Не используется для довольно мощных моторов по вышеуказанным причинам.
Во втором случае во время применения полупроводников происходит процесс управления мотором при помощи подачи определённого числа импульсов. Схема способна совершать изменение длительности таких импульсов, что, в свою очередь, будет изменять общую скорость вращения мотора без потери показателя мощности.
 Если вы не хотите самостоятельно изготавливать оборудование, а хотите купить уже полностью готовое к применению устройство, то стоит обратить особое внимание на главные параметры и характеристики, такие, как мощность, тип системы управления прибором, напряжение в устройстве, частоту, а также напряжение рабочего типа. Лучше всего будет производить расчёт общих характеристик всего механизма, в котором стоит применять регулятор общего напряжения двигателя. Стоит обязательно помнить, что нужно производить сопоставление с параметрами частотного преобразователя.
Если вы не хотите самостоятельно изготавливать оборудование, а хотите купить уже полностью готовое к применению устройство, то стоит обратить особое внимание на главные параметры и характеристики, такие, как мощность, тип системы управления прибором, напряжение в устройстве, частоту, а также напряжение рабочего типа. Лучше всего будет производить расчёт общих характеристик всего механизма, в котором стоит применять регулятор общего напряжения двигателя. Стоит обязательно помнить, что нужно производить сопоставление с параметрами частотного преобразователя.
Благодаря надежности и простоте конструкции асинхронные двигатели (АД) получили широкое распространение. В большинстве станков, промышленном и бытовом оборудовании применяются электродвигатели такого типа. Изменение скорости вращения АД производится механически (дополнительной нагрузкой на валу, балластом, передаточными механизмами, редукторами и т.д.) или электрическими способами. Электрическое регулирование более сложное, но и гораздо более удобное и универсальное.

Для многих агрегатов применяется именно электрическое управление. Оно обеспечивает точное и плавное регулирование пуска и работы двигателя. Электрическое управление производится за счет:
- изменения частоты тока;
- силы тока;
- уровня напряжения.
В этой статье мы рассмотрим популярные способы, как может осуществляться регулировка оборотов асинхронного двигателя на 220 и 380В.
Изменение скорости АД с короткозамкнутым ротором
Существует несколько способов:
- Управление вращением за счет изменения электромагнитного поля статора: частотное регулирование и изменение числа пар полюсов.
- Изменение скольжения электромотора за счет уменьшения или увеличения напряжения (может применяться для АД с фазным ротором).
Частотное регулирование
В данном случае регулировка производится с помощью подключенного к двигателю устройства для преобразования частоты. Для этого применяются мощные тиристорные преобразователи. Процесс частотного регулирования можно рассмотреть на примере формулы ЭДС трансформатора:
Данное выражение означает, что для сохранения постоянного магнитного потока, означающего сохранение перегрузочной способности электромотора, следует одновременно с преобразованием частоты корректировать и уровень питающего напряжения. Если сохраняется выражение, вычисленное по формуле:
то это означает, что критический момент не изменен. А механические характеристики соответствуют рисунку ниже, если вы не понимаете, что значат эти характеристики, то в этом случае регулировка происходит без потери мощности и момента.
 Достоинствами данного метода являются:
Достоинствами данного метода являются:
- плавное регулирование;
- изменение скорости вращения ротора в большую и меньшую сторону;
- жесткие механические характеристики;
- экономичность.
Недостаток один — необходимость в частотном преобразователе, т.е. увеличение стоимости механизма. К слову, на современном рынке представлены модели с однофазным и трёхфазным входом, стоимость которых при мощности 2-3 кВт лежит в диапазоне 100-150 долларов, что не слишком дорого для полноценной регулировки привода станков в частной мастерской.
Переключение числа пар полюсов
Данный метод применяется для многоскоростных двигателей со сложной обмоткой, позволяющей изменять число пар ее полюсов. Самое широкое применение получили двухскоростные, трехскоростные и четырехскоростные АД. Принцип регулировки проще всего рассмотреть на основе двухскоростного АД. В такой машине обмотка каждой фазы состоит из двух полуобмоток. Скорость вращения изменяется при подключении их последовательно или параллельно.

В четырехскоростном электродвигателе обмотка выполнена в виде двух независимых друг от друга частей. При изменении числа пар полюсов первой обмотки производится изменение скорости работы электромотора с 3000 до 1500 оборотов в минуту. При помощи второй обмотки производится регулировка вращения 1000 и 500 оборотов в минуту.
При изменении числа пар полюсов происходит и изменение критического момента. Для его сохранения неизменным, требуется одновременно с изменением числа пар полюсов регулировать и питающее напряжение, например, переключением схемы звезда-треугольник и их вариациями.
Достоинства данного метода:
- жесткие механические характеристики двигателя;
- высокий КПД.
- ступенчатая регулировка;
- большой вес и габаритные размеры;
- высокая стоимость электромотора.
Способы управления скоростью АД с фазным ротором
Изменение скорости вращения АД с фазным ротором производится путем изменения скольжения. Рассмотрим основные варианты и способы.
Изменение питающего напряжения
Этот способ также применяется для АД с КЗ ротором. Асинхронный двигатель подключается через автотрансформатор или ЛАТР. Если уменьшать напряжение питания, частота вращения двигателя снизится.

Но такой режим уменьшает перегрузочную способность двигателя. Этот способ применяется для регулирования в пределах напряжения не выше номинального, так как увеличение номинального напряжения приведет к выходу электродвигателя из строя.
Активное сопротивление в цепи ротора
При использовании данного метода в цепь ротора подключается реостат или набор постоянных резисторов большой мощности. Данное устройство предназначено для плавного увеличения сопротивления.

Скольжение растет пропорционально увеличению сопротивления, а скорость вращения вала электромотора при этом снижается.

- большой диапазон регулирования в сторону понижения скорости вращения.
- снижение КПД;
- увеличение потерь;
- ухудшение механических характеристик.
Асинхронный вентильный каскад и машины двойного питания
Изменение скорости работы асинхронных электромоторов в данных случаях выполняется путем изменения скольжения. При этом скорость вращения электромагнитного поля неизменна. Напряжение подается напрямую на обмотки статора. Регулировка происходит за счет использования мощности скольжения, которая трансформируется в цепь ротора, и образует добавочную ЭДС. Такие методы используются только в специальных машинах и крупных промышленных устройствах.

Плавный пуск асинхронных электродвигателей
АД кроме безусловных преимуществ, обладают существенными недостатками. Это рывок на старте и большие пусковые токи, в 7 раз превышающие номинальные. Для мягкого старта электродвигателя используются следующие методы:
- переключение обмоток по схеме звезда – треугольник;
- включение электродвигателя через автотрансформатор;
- использование специализированных устройств для плавного пуска.
В большинстве частотных регуляторов есть функция плавного пуска двигателя. Это не только снижает пусковые токи, но и уменьшает нагрузки на исполнительные механизмы. Поэтому регулирование частоты и плавный пуск довольно сильно связаны между собой.
Как сделать устройство для изменения скорости вращения электродвигателя своими руками
Для регулировки маломощных однофазных АД можно использовать диммеры. Однако этот способ ненадежен и обладает серьезными недостатками: снижением КПД, серьезным перегревом устройства и опасностью повреждения двигателя.
Для надежного и качественного регулирования оборотов электродвигателей на 220В, лучше всего подходит частотное регулирование.
Приведенная ниже схема позволяет собрать частотное устройство для регулировки электромоторов мощностью до 500 Вт. Изменение скорости вращения производится в границах от 1000 до 4000 оборотов в минуту.
Устройство состоит из задающего генератора с изменяемой частотой, состоящего из мультивибратора, собранного на микросхеме К561ЛА7, счетчика на микросхеме К561ИЕ8, полумоста регулятора. Выходной трансформатор Т1 выполняет развязку верхнего и нижнего транзисторов полумоста.

Демпфирующая цепь С4, R7 гасит всплески напряжения опасные для силовых транзисторов VT3, VT4. Выпрямитель, удвоитель напряжения питающей сети, включает в себя диодный мост VD9, с конденсатором фильтра на которых происходит удвоение напряжения питания полумоста.
Напряжение первичной обмотки: 2х12В, вторичной обмотки 12В. Первичная обмотка трансформатора управления ключами, состоит из 120 витков медного провода сечением 0,7мм, с отводом от середины. Вторичная – две обмотки, каждая по 60 витков повода сечением 0,7 мм.
Вторичные обмотки необходимо максимально надежно заизолировать друг от друга, так как разница потенциалов между ними доходит до 640 В. Подключение выходных обмоток к затворам ключей производится в противофазе.
Вот мы и рассмотрели способы регулировки оборотов асинхронных двигателей. Если возникли вопросы, задавайте их в комментариях под статьей!
«>
Регулировка скорости электродвигателей переменного тока
Однофазные электродвигатели переменного тока, например, типа PD-09 широко применяются в различных устройствах автоматики и бытовых приборах.
Серьезным недостатком таких двигателей является невозможность регулировать скорость вращения, которая жестко связана с частотой питающей сети. Как показали испытания, двигатель PD-09 достаточно устойчиво работает при частоте питающего напряжения в диапазоне 25-80 Гц, что позволяет регулировать скорость вращения в пределах примерно 600-1900 об/мин.
Построить генератор синусоидального напряжения 127-220 В достаточной мощности довольно сложно, значительно проще — генератор прямоугольного напряжения с применением мостовой или полумостовой схемы на транзисторах, работающих в режиме насыщения.

Схема устройства для питания двигателя PD-09 изображена на рис.1. Устройство состоит из задающего мультивибратора на транзисторах VT1, VT2, делителя частоты на 2, выполненного на триггере DD1, оптронных ключей DA1, ключевых транзисторов VT3, VT4.
Особенностью схемы является раздельное питание базовых цепей транзисторов, что позволяет легко обеспечить режим насыщения, исключить необходимость подбора транзисторов и подобрать транзисторы с низким коэффициентом передачи тока.
Выходное напряжение полумостовой схемы равно, как известно, половине напряжения питания и составляет около 150 В. Избыточное напряжение 30 В гасится резистором R15.
Наладка устройства сводится к установке необходимого диапазона регулировки подбором элементов С1, R2. В случае неустойчивой работы двигателя на минимальных оборотах следует увеличить емкость конденсатора С9.
При использовании двигателей, рассчитанных на напряжение 220 В, напряжение 150 В может оказаться недостаточным. В этом случае вместо полумостовой схемы следует применить мостовую схему, увеличить число токовых ключей до четырех (рис.2).
Устройство можно также использовать для питания двигателей, рассчитанных на частоту 400 Гц. Для этого достаточно увеличить в 8 раз частоту задающего генератора, уменьшив емкость конденсатора С1.
В принципе возможно создание аналогичного устройства и для питания трехфазных двигателей небольшой мощности, если увеличить число ключей до шести. Трехфазную последовательность прямоугольных напряжений можно получить с помощью известной схемы, состоящей из счетчика-делителя на шесть и логических элементов «исключающее ИЛИ» (рис.3).

А.Н. Спиридонов, г.Киев.
Регулятор оборотов электродвигателя 220В | 2 Схемы
")
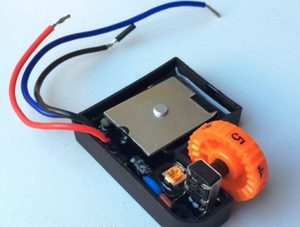
Качественный и надёжный контроллер скорости вращения для однофазных коллекторных электродвигателей можно сделать на распространённых деталях буквально за 1 вечер. Эта схема имеет встроенный модуль обнаружения перегрузки, обеспечивает мягкий пуск управляемого двигателя и стабилизатор скорости вращения мотора. Работает такой блок с напряжением как 220, так и 110 вольт.
Технические параметры регулятора
- напряжение питания: 230 вольт переменного тока
- диапазон регулирования: 5…99%
- напряжение нагрузки: 230 В / 12 А (2,5 кВт с радиатором)
- максимальная мощность без радиатора 300 Вт
- низкий уровень шума
- стабилизация оборотов
- мягкий старт
- размеры платы: 50×60 мм
Принципиальная электросхема
") Схема регулятор мотора на симисторе и U2008
Схема регулятор мотора на симисторе и U2008Схема модуля системы регулирования основана на генераторе ШИМ импульсов и симисторе управления мотором — классическая схемотехника для подобных устройств. Элементы D1 и R1 обеспечивают ограничение величины напряжения питания до значения безопасной для питания микросхемы генератора. Конденсатор C1 отвечает за фильтрацию напряжения питания. Элементы R3, R5 и P1 являются делителем напряжения с возможностью его регулирования, который используется для задания величины мощности, подаваемой в нагрузку. Благодаря применению резистора R2, непосредственно входящего в цепь поступления на м/с фазы, внутренние блоки синхронизированы с симистором ВТ139.
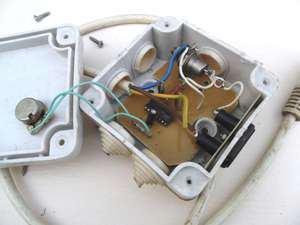
") Печатная плата
Печатная платаНа следующем рисунке показано расположение элементов на печатной плате. Во время монтажа и запуска следует обратить внимание на обеспечение условий безопасной работы — регулятор имеет питание от сети 220В и его элементы непосредственно подключены к фазе.
Увеличение мощности регулятора
В испытательном варианте был применен симистор BT138/800 с максимальным током 12 А, что дает возможность управления нагрузкой более 2 кВт. Если необходимо управление ещё большими токами нагрузки — советуем тиристор установить за пределами платы на большом радиаторе. Также следует помнить о правильном выборе предохранителя FUSE в зависимости от нагрузки.
")
Кроме управления оборотами электромоторов, можно без каких-либо переделок использовать схему для регулировки яркости ламп.
Частотный регулятор для асинхронного двигателя 220в
 При пуске электродвигателя происходит превышение потребления тока в 7 раз, что способствует преждевременному выходу из строя электрической и механической частей мотора. Для предотвращения этого следует применять регулятор оборотов электродвигателя. Существует много моделей заводского плана, но для того чтобы сделать такое устройство самостоятельно, необходимо знать принцип действия электродвигателя и способы регулирования оборотов ротора.
При пуске электродвигателя происходит превышение потребления тока в 7 раз, что способствует преждевременному выходу из строя электрической и механической частей мотора. Для предотвращения этого следует применять регулятор оборотов электродвигателя. Существует много моделей заводского плана, но для того чтобы сделать такое устройство самостоятельно, необходимо знать принцип действия электродвигателя и способы регулирования оборотов ротора.
Общие сведения
Электродвигатели переменного тока получили широкое распространение во многих сферах жизнедеятельности человека, а именно — модели асинхронного типа. Основное назначение двигателя как электрической машины — трансформация электрической энергии в механическую. Асинхронный в переводе означает неодновременный, так как частота вращения ротора отличается от частоты переменного напряжения (U) в статоре. Существует две разновидности асинхронных двигателей по типу питания:
Однофазные применяются для домашних бытовых нужд, а трехфазные используются на производстве. В трехфазных асинхронных двигателях (далее ТАД) используются два вида роторов:
- замкнутые;
- фазные.
Замкнутые составляют около 95% от всех применяемых двигателей и обладают значительной мощностью (от 250 Вт и выше). Фазный тип конструктивно отличается от АД, но применяется достаточно редко по сравнению с первым. Ротор представляет собой стальную фигуру цилиндрической формы, которая помещается внутрь статора, причем на его поверхность напрессован сердечник.
Короткозамкнутый и фазный роторы
Впаянные или залитые в поверхность сердечника и накоротко замкнутые с торцов двумя кольцами высокопроводящие медные (для машин большой мощности) или алюминиевые стержни (для машин меньшей мощности) играют роль электромагнитов с полюсами, обращенными к статору. Стержни обмотки не имеют какой-либо изоляции, так как напряжение в такой обмотке нулевое.
Более часто используемый для стержней двигателей средней мощности алюминий отличается малой плотностью и высокой электропроводностью.
Для уменьшения высших гармоник электродвижущей силы (ЭДС) и исключения пульсации магнитного поля стержни ротора имеют определенным образом рассчитанный угол наклона относительно оси вращения. Если используется электромотор маленькой мощности, то пазы представляют собой закрытые конструкции, которые отделяют ротор от зазора с целью увеличения индуктивной составляющей сопротивления.
Ротор в виде фазного исполнения или типа характеризуются обмоткой, концы ее соединены по типу «звезда» и присоединены к контактным кольцам (на валу), по которым скользят графитовые щетки. Для устранения вихревых токов поверхность обмоток покрывается оксидной пленкой. Кроме того, в цепь обмотки ротора добавляется резистор, позволяющий изменять активное сопротивление (R) роторной цепи для уменьшения значений пусковых токов (Iп). Пусковые токи отрицательно влияют на электрическую и механическую части электромотора. Переменные резисторы, используемые для регулирования Iп:
- Металлические или ступенчатые с ручным переключением.
- Жидкостные (за счет погружения на глубину электродов).
Щетки, выполненные из графита, изнашиваются, и некоторые модели оборудованы короткозамкнутым конструктивным исполнением, которое поднимает щетки и замыкает кольца после запуска мотора. АД с фазным ротором являются более гибкими в плане регулирования Iп.
Конструктивные особенности
Асинхронный двигатель не имеет выраженных полюсов в отличие от электромотора постоянного тока. Число полюсов определяется количеством катушек в обмотках неподвижной части (статор) и способом соединения. В асинхронной машине с 4-мя катушками проходит магнитный поток. Статор выполняется из листов спецстали (электротехническая сталь), сводящих к нулю вихревые токи, при которых происходит значительный нагрев обмоток. Он приводит к массовому межвитковому замыканию.

Железняк или сердечник ротора напрессовывается непосредственно на вал. Между ротором и статором существует минимальный воздушный зазор. Обмотка ротора выполняется в виде «беличьей клетки» и сделана из медных или алюминиевых стержней.
В электромоторах мощностью до 100 кВт применяется алюминий, обладающий незначительной плотностью — для заливки в пазы сердечника ротора. Но несмотря на такое устройство, двигатели этого типа греются. Для решения этой проблемы используются вентиляторы для принудительного охлаждения, которые насаживаются на вал. Эти двигатели просты и надежны. Однако двигатели потребляют при пуске большой ток, в 7 раз больше номинального. Из-за этого они имеют низкий пусковой момент, так как большая часть энергии электричества идет на нагрев обмоток.
Электромоторы, у которых повышенный момент пуска, отличаются от обыкновенных асинхронных конструкцией ротора. Ротор изготавливается в виде двойной «беличьей клетки». Эти модели имеют сходство с фазными типами изготовления ротора. Он состоит из внутренней и наружной «беличьих клеток», причем наружная является пусковой и обладает большим активным и малым реактивным R. Наружная обладает незначительным активным и высоким реактивным R. При увеличении частоты вращения I переключается на внутреннюю клетку и работает в виде короткозамкнутого ротора.
Принцип работы
При протекании I по статорной обмотке в каждой из них создается магнитный поток (Ф). Эти Ф сдвинуты на 120 градусов относительно друг друга. Полученный Ф является вращающимся, создающим электродвижущую силу (ЭДС) в алюминиевых или медных проводниках. В результате этого и создается пусковой магнитный момент электромотора, и ротор начинает вращаться. Этот процесс называется еще в некоторых источниках скольжением (S), показывающим разность частоты n1 электромагнитного поля стартера, которое становится больше, чем частота, полученная при вращении ротора n2. Вычисляется в процентах и имеет вид: S = ((n1-n2)/n1) * 100%.
 Значение S при начальном старте электромотора равно примерно 1, но при возрастании значений n2 становится меньше. В этот момент I в роторе уменьшается, следовательно, и ЭДС становится меньше номиналом. При холостом ходе S минимально, но при увеличении момента статического взаимодействия ротора и статора эта величина достигает критического значения. Если выполняется неравенство: S > Sкр, то мотор работает нормально, однако при превышении значения Sкр он может «опрокинуться». Опрокидывание вызывает нестабильную работу, но с течением времени исчезает.
Значение S при начальном старте электромотора равно примерно 1, но при возрастании значений n2 становится меньше. В этот момент I в роторе уменьшается, следовательно, и ЭДС становится меньше номиналом. При холостом ходе S минимально, но при увеличении момента статического взаимодействия ротора и статора эта величина достигает критического значения. Если выполняется неравенство: S > Sкр, то мотор работает нормально, однако при превышении значения Sкр он может «опрокинуться». Опрокидывание вызывает нестабильную работу, но с течением времени исчезает.
Методы настройки оборотов
Для предотвращения отрицательного влияния во время пуска нужно уменьшить обороты электродвигателя 220 в или 380 в. Существует несколько способов достижения этой цели:
- Изменение значения R цепи ротора.
- Изменение U в обмотке статора.
- Изменение частоты U.
- Переключение полюсов.
При изменении значения R роторной части при помощи дополнительных резисторов приводит к снижению частоты вращения, но в результате этого уменьшается мощность. Следовательно, получается значительная потеря электроэнергии. Этот тип регулирования следует применять для фазного ротора.
При изменении значений U на статорной катушке возможно механическое или электрическое управление частотой вращения ротора. В этом случае используется регулятор U. Использование такого способа позволяет применять его только при вентиляторном характере нагрузки (например, регулятор оборотов вентилятора 220в). Для всех остальных случаев применяют трехфазные автоматические трансформаторы, позволяющие плавно изменять значения U, или тиристорные регуляторы.
Исходя из формулы зависимости частоты вращения от частоты питающего U можно производить регулирование количества оборотов ротора. Частота вращающегося магнитного поля статора вычисляется по формуле: Nст = 60 * f /p (f — частота тока питающей сети, p — число пар полюсов). Этот способ обеспечивает возможность плавного регулирования частоты вращения роторной части. Для получения высокого коэффициента полезного действия нужно изменять частоту и U. Этот способ является оптимальным для двигателей с короткозамкнутым ротором, так как потери мощности минимальны. Существует два метода изменения количества пар полюсов:
- В статор (в пазы) нужно уложить 2 обмотки с различным числом p.
- Обмотка состоит из двух частей, соединенных параллельно или последовательно.
Основным недостатком этого метода является поддержание ступенчатого характера изменения частоты электромотора с короткозамкнутым ротором.
Виды и критерии выбора
Для выбора регулятора нужно руководствоваться определенными характеристиками для конкретного случая. Среди всех критериев можно выбрать следующие:
- По типу управления. Для двигателей коллекторного типа применяются регуляторы с векторной или скалярной системой управления.
- Мощность является основным параметром, от которого нужно отталкиваться.
- По диапазону U.
- По диапазону частот. Нужно выбирать модель, которая соответствует требованиям пользователя для конкретного случая.
- Прочие характеристики, в которые включены гарантия, габариты, комплектация.
 По типу управления. Для двигателей коллекторного типа применяются регуляторы с векторной или скалярной системой управления.
По типу управления. Для двигателей коллекторного типа применяются регуляторы с векторной или скалярной системой управления.Кроме того, регулятор подбирается мощнее, чем сам электродвигатель по формуле: Pрег = 1,3 * Pдвиг (Pрег, Pдвиг — мощность регулятора и двигателя соответственно). Его нужно выбирать на разные диапазоны U, так как универсальность играет важную роль.
Устройство на тиристорах
В этой модели, представленной на схеме 1, применяются 2 тиристора, включенных встречно-параллельно, хотя их можно заменить одним симистором.

Схема 1 — Тиристорная регулировка оборотов коллекторного двигателя без потери мощности.
Эта схема производит регулирование с помощью открытия или закрытия тиристоров (симистора) при фазовом переходе через нейтраль. Для корректного управления коллекторным двигателем применяют следующие способы модификации схемы 1:
- Установка защитных LRC-цепей, состоящих из конденсаторов, резисторов и дросселей.
- Добавление на входе емкости.
- Использование тиристоров или симистора, ток которых превышает номинальное значение силы тока двигателя в диапазоне от 3..8 раз.
Этот тип регуляторов имеет достоинства и недостатки. К первым относятся низкая стоимость, маленький вес и габариты. Ко вторым следует отнести следующие:
- применение для моторов небольшой мощности;
- происходит шум и рывки мотора;
- при использовании схемы на симисторах происходит попадание постоянного U на двигатель.
Этот тип регулятора ставится в вентиляторы, кондиционеры, стиральные машины и электродрели . Отлично выполняет свои функции, несмотря на недостатки.
Транзисторный тип
Еще одним названием регулятора транзисторного типа является автотрансформатор или ШИМ-регулятор (схема 2). Он изменяет номинал U по принципу широтно-импульсной модуляции (ШИМ) при помощи выходного каскада, в котором применяются транзисторы типа IGBT.

Схема 2 — Транзисторный ШИМ-регулятор оборотов.
Коммутация транзисторов происходит с высокой частотой и благодаря этому можно изменить ширину импульсов. Следовательно, при этом изменится и значение U. Чем длиннее импульс и короче паузы, тем выше значение U и наоборот. Положительные аспекты применения этой разновидности следующие:
- Незначительный вес прибора при низких габаритах.
- Довольно низкая стоимость.
- При низких оборотах отсутствие шума.
- Управление за счет низких значений U (0..12 В).
Основной недостаток применения заключается в том, что расстояние до электромотора должно быть не более 4 метров.
Регулирование за счет частоты
 Регулирование оборотов моторов различных типов за счет частоты получило широкое применение. Частотное преобразование занимает лидирующую позицию на рынке сбыта устройств-регуляторов оборотов и осуществления плавного пуска. Благодаря своей универсальности возможно влиять на мощность, производительность и скорость любого устройства с электродвигателем. Эти устройства применяются для однофазных и трехфазных двигателей. Применяются такие виды частотных преобразователей:
Регулирование оборотов моторов различных типов за счет частоты получило широкое применение. Частотное преобразование занимает лидирующую позицию на рынке сбыта устройств-регуляторов оборотов и осуществления плавного пуска. Благодаря своей универсальности возможно влиять на мощность, производительность и скорость любого устройства с электродвигателем. Эти устройства применяются для однофазных и трехфазных двигателей. Применяются такие виды частотных преобразователей:
- Специализированные однофазные.
- Трехфазные без конденсатора.
Для регулирования оборотов используется конденсатор, включенный с обмотками однофазного двигателя (схема 3). Этот преобразователь частоты (ПЧ) имеет емкостное R, которое зависит от частоты протекающего переменного тока. Выходной каскад такого ПЧ выполнен на IGBT-транзисторах.

Схема 3 — Частотный регулятор оборотов.
У специализированного ПЧ есть свои преимущества и недостатки. Преимуществами являются следующие:
- Управление АД без участия человека.
- Стабильность.
- Дополнительные возможности.
Существует возможность управлять работой электромотора при определенных условиях, а также защита от перегрузок и токов КЗ. Кроме того, возможно расширять функционал при помощи подключения цифровых датчиков, мониторинга параметров работы и использования PID-регулятора. К минусам можно отнести ограничения при управлении частотой и довольно высокую стоимость.
Для трехфазных АД применяются также устройства регулирования частоты (схема 4). Регулятор имеет на выходе три фазы для подключения электромотора.

Схема 4 — ПЧ для трехфазного двигателя.
У этого варианта тоже есть свои сильные и слабые стороны. К первым можно отнести следующие: низкую стоимость, выбор мощности, широкий диапазон частотной регуляции, а также все преимущества однофазных преобразователей частоты. Среди всех отрицательных сторон можно выделить основные: предварительный подбор и нагрев при пуске.
Изготовление своими руками
Если нет возможности, а также желания приобретать регулятор заводского типа, то можно собрать его своими руками. Хотя регуляторы типа » tda1085 » зарекомендовали себя очень хорошо. Для этого нужно детально ознакомиться с теорией и приступить к практике. Очень популярны схемы симисторного исполнения, в частности регулятор оборотов асинхронного двигателя 220в (схема 5). Сделать его несложно. Он собирается на симисторе ВТ138, хорошо подходящем для этих целей.

Схема 5 — Простой регулятор оборотов на симисторе.
Этот регулятор может быть использован и для регулировки оборотов двигателя постоянного тока 12 вольт, так как является довольно простым и универсальным. Обороты регулируются благодаря изменению параметров Р1, определяющему фазу входящего сигнала, который открывает переход симистора.
Принцип работы прост. При запуске двигателя происходит его затормаживание, индуктивность изменятся в меньшую сторону и способствует увеличению U в цепи «R2—>P1—>C2». При разряде С2 симистор открывается в течение некоторого времени.
Существует еще одна схема. Она работает немного по-другому: путем обеспечения хода энергии обратного типа, которое является оптимально выгодным. В схему включен довольно мощный тиристор.

Схема 6 — Устройство тиристорного регулятора.
Схема состоит из генератора сигнала управления, усилителя, тиристора и участка цепи, выполняющего функции стабилизатора вращения ротора.
Наиболее универсальной схемой является регулятор на симисторе и динисторе (схема 7). Он способен плавно убавить скорость вращения вала, задать реверс двигателю (изменить направление вращения) и понизить пусковой ток.

Принцип работы схемы:
- С1 заряжается до U пробоя динистора D1 через R2.
- D1 при пробитии открывает переход симистора D2, который отвечает за управление нагрузкой.
Напряжение при нагрузке прямо пропорционально зависит от частотной составляющей при открытии D2, зависящего от R2. Схема применяется в пылесосах. Она содержит универсальное электронное управление, а также способность простого подключения питания 380 В. Все детали следует расположить на печатной плате, изготовленной по лазерно-утюжной технологии (ЛУТ). Подробно с этой технологии изготовления плат можно ознакомиться в интернете.
Таким образом, при выборе регулятора оборотов электродвигателя возможна покупка заводского или изготовление своими руками. Самодельный регулятор сделать достаточно просто, так как при понимании принципа действия устройства можно с легкостью собрать его. Кроме того, следует соблюдать правила безопасности при осуществлении монтажа деталей и при работе с электричеством.
Плавная работа двигателя, без рывков и скачков мощности – это залог его долговечности. Для контроля этих показателей используется регулятор оборотов электродвигателя на 220В, 12 В и 24 В, все эти частотники можно изготовить своими руками или купить уже готовый агрегат.
Зачем нужен регулятор оборотов
Регулятор оборотов двигателя, частотный преобразователь – это прибор на мощном транзисторе, который необходим для того, чтобы инвертировать напряжение, а также обеспечить плавную остановку и пуск асинхронного двигателя при помощи ШИМ. ШИМ – широко-импульсное управление электрическими приспособлениями. Его применяют для создания определенной синусоиды переменного и постоянного тока.
Фото – мощный регулятор для асинхронного двигателя
Самый простой пример преобразователя – это обычный стабилизатор напряжения. Но у обсуждаемого прибора гораздо больший спектр работы и мощность.
Частотные преобразователи используются в любом устройстве, которое питается от электрической энергии. Регуляторы обеспечивают чрезвычайно точный электрический моторный контроль, так что скорость двигателя можно изменять в меньшую или большую сторону, поддерживать обороты на нужном уровне и защищать приборы от резких оборотов. При этом электродвигателем используется только энергия, необходимая для работы, вместо того, чтобы запускать его на полной мощности.
Фото – регулятор оборотов двигателя постоянного тока
Зачем нужен регулятор оборотов асинхронного электродвигателя:
- Для экономии электроэнергии. Контролируя скорость мотора, плавность его пуска и остановки, силы и частоты оборотов, можно добиться значительной экономии личных средств. В качестве примера, снижение скорости на 20% может дать экономию энергии в размере 50%.
- Преобразователь частоты может использоваться для контроля температуры процесса, давления или без использования отдельного контроллера;
- Не требуется дополнительного контроллера для плавного пуска;
- Значительно снижаются расходы на техническое обслуживание.
Устройство часто используется для сварочного аппарата (в основном для полуавтоматов), электрической печки, ряда бытовых приборов (пылесоса, швейной машинки, радио, стиральной машины), домашнего отопителя, различных судомоделей и т.д.
 Фото – шим контроллер оборотов
Фото – шим контроллер оборотов
Принцип работы регулятора оборотов
Регулятор оборотов представляет собой устройство, состоящее из следующих трех основных подсистем:
- Двигателя переменного тока;
- Главного контроллера привода;
- Привода и дополнительных деталей.
Когда двигатель переменного тока запускается на полную мощность, происходит передача тока с полной мощностью нагрузки, такое повторяется 7-8 раз. Этот ток сгибает обмотки двигателя и вырабатывает тепло, которое будет выделяться продолжительное время. Это может значительно снизить долговечность двигателя. Иными словами, преобразователь – это своеобразный ступенчатый инвертор, который обеспечивает двойное преобразование энергии.
Фото – схема регулятора для коллекторного двигателя
В зависимости от входящего напряжения, частотный регулятор числа оборотов трехфазного или однофазного электродвигателя, происходит выпрямление тока 220 или 380 вольт. Это действие осуществляется при помощи выпрямляющего диода, который расположен на входе энергии. Далее ток проходит фильтрацию при помощи конденсаторов. Далее формируется ШИМ, за это отвечает электросхема. Теперь обмотки асинхронного электродвигателя готовы к передаче импульсного сигнала и их интеграции к нужной синусоиде. Даже у микроэлектродвигателя эти сигналы выдаются, в прямом смысле слова, пачками.
Как выбрать регулятор
Существует несколько характеристик, по которым нужно выбирать регулятор оборотов для автомобиля, станочного электродвигателя, бытовых нужд:
- Тип управления. Для коллекторного электродвигателя бывают регуляторы с векторной или скалярной системой управления. Первые чаще применяются, но вторые считаются более надежными;
- Мощность. Это один из самых важных факторов для выбора электрического преобразователя частот. Нужно подбирать частотник с мощностью, которая соответствует максимально допустимой на предохраняемом приборе. Но для низковольтного двигатель лучше подобрать регулятор мощнее, чем допустимая величина Ватт;
- Напряжение. Естественно, здесь все индивидуально, но по возможности нужно купить регулятор оборотов для электродвигателя, у которого принципиальная схема имеет широкий диапазон допустимых напряжений;
- Диапазон частот. Преобразование частоты – это основная задача данного прибора, поэтому старайтесь выбрать модель, которая будет максимально соответствовать Вашим потребностям. Скажем, для ручного фрезера будет достаточно 1000 Герц;
- По прочим характеристикам. Это срок гарантии, количество входов, размер (для настольных станков и ручных инструментов есть специальная приставка).
Хорошо себя зарекомендовали приборы марки Sinus, E-Sky и Pic.
При этом также нужно понимать, что есть так называемый универсальный регулятор вращения. Это частотный преобразователь для бесколлекторных двигателей.
Фото – схема регулятора для бесколлекторных двигателей
В данной схеме есть две части – одна логическая, где на микросхеме расположен микроконтроллер, а вторая – силовая. В основном такая электрическая схема используется для мощного электрического двигателя.
Видео: регулятор оборотов электродвигателя с ШИро V2
Как сделать самодельный регулятор оборотов двигателя
Можно сделать простой симисторный регулятор оборотов электродвигателя, его схема представлена ниже, а цена состоит только из деталей, продающихся в любом магазине электротехники.
Для работы нам понадобится мощный симистор типа BT138-600, её советует журнал радиотехники.
Фото – схема регулятора оборотов своими руками
В описанной схеме, обороты будут регулироваться при помощи потенциометра P1. Параметром P1 определяется фаза входящего импульсного сигнала, который в свою очередь открывает симистор. Такая схема может применяться как в полевом хозяйстве, так и в домашнем. Можно использовать данный регулятор для швейных машинок, вентиляторов, настольных сверлильных станков.
Принцип работы прост: в момент, когда двигатель немного затормаживается, его индуктивность падает, и это увеличивает напряжение в R2-P1 и C3, то в свою очередь влечет более продолжительное открытие симистора.
Тиристорный регулятор с обратной связью работает немного по-другому. Он обеспечивает обратный ход энергии в энергетическую систему, что является очень экономным и выгодным. Данный электронный прибор подразумевает включение в электрическую схемы мощного тиристора. Его схема выглядит вот так:
Здесь для подачи постоянного тока и выпрямления требуется генератор управляющего сигнала, усилитель, тиристор, цепь стабилизации оборотов.
Частотное управление электроприводами активно развивается и все чаще можно услышать о новом методе управления, или улучшенном частотнике, или о внедрении частотного электропривода в какой-то сфере, где ранее никто и подумать не мог что это возможно. Но это факт!
Если мы внимательно рассмотрим электродвигатели, к которым применяют частотное регулирование – то это асинхронные или синхронные трехфазные двигатели. Существует несколько разновидностей преобразователей частоты. Но ведь есть и однофазные асинхронные машины, почему прогресс не касается их? Почему частотное управление не применяют так активно к однофазным машинам? Давайте рассмотрим.
Содержание:
Принцип работы однофазной асинхронной машины
При однофазном питании асинхронника в нем вместо вращающегося магнитного поля возникает пульсирующее, которое можно разложить на два магнитных поля, которые будут вращаться в разные стороны с одинаковой частотой и амплитудой. При остановленном роторе электродвигателя данные поля создадут моменты одинаковой величины, но различного знака. В итоге результирующий пусковой момент будет равен нулю, что не позволит двигателю запустится. По своим свойствам однофазный электродвигатель похож на трехфазный, который работает при сильном искажении симметрии напряжений:
на рисунке а) показана схема асинхронной однофазной машины, а на б) векторная диаграмма
Основные виды однофазных электроприводов
Как упоминалось однофазный двигатель не может развивать пусковой момент, следствием чего становится невозможность его самостоятельного запуска. Для этого придумали несколько способов компенсации магнитного поля противоположного по знаку основному.
Двигатели с пусковой обмоткой
В данном способе пуска кроме основной обмотки Р, имеющей фазную зону 120 0 , на статор наматывают еще и пусковую П, которая имеет фазную зону 60 0 . Также пусковая обмотка сдвигается относительно рабочей на 90 0 электрических. Для того, чтоб создать фазовый сдвиг между токами обмоток Iр и Iп последовательно в пусковую обмотку подключают элемент, приводящий к сдвигу фаз ψ (фазосдвигающее сопротивление Zп):
Где: а) схема подключения машины, б) векторные диаграммы при использовании различных сопротивлений.
Наилучшими условиями для пуска будет включения конденсатора в пусковую обмотку. Но поскольку емкость конденсатора довольно велика, соответственно и его стоимость и габариты тоже возрастают. Зачастую его применяют для получения повышенного момента для пуска. Пуск с помощью индуктивности имеет наихудшие показатели и в настоящее время не используется. Довольно часто могут применять запуск с помощью активного сопротивления, при этом пусковую обмотку делают с повышенным активным сопротивлением. После запуска электродвигателя пусковая обмотка отключается. Ниже показаны схемы включений и их пусковые характеристики:
Где: а,б) двигатели с пусковой обмоткой, в,г) конденсаторные
Конденсаторный двигатель
Данный тип электродвигателя имеет две рабочие обмотки, в одну из которых подключают рабочую емкость Ср. Данные обмотки сдвинуты относительно друг друга на 90 0 электрических и имеют фазные зоны тоже 90 0 . При этом мощности обеих обмоток равны, но их токи и напряжения различны, также различны количества витков. Иногда величины конденсатора рабочего не достаточно для формирования нужного пускового момента, поэтому параллельно ему могут вешать пусковой, как это показано на рисунке выше. Схема приведена ниже:
Где: а) схема конденсаторного электродвигателя, б) его векторная диаграмма
В данном типе однофазных машин коэффициент мощности cosφ даже выше чем у трехфазных. Это объясняется наличием конденсатора. КПД такого электродвигателя выше, чем однофазного электродвигателя с пусковой обмоткой.
Частотное регулирование однофазных асинхронных электродвигателей
Итак, все чаще появляются предложения частотных преобразователей, которые могут управлять однофазными асинхронными машинами. В силу того что частотники предназначены для работы с трехфазными машинами, то для регулирования оборотов однофазной машинами необходим особый вид частотного преобразователя. Это обусловлено тем, что трехфазные и однофазные машины имеют немного разный принцип работы. Давайте рассмотрим схему включения, которую предоставляет один из официальных производителей частотных преобразователей для однофазных машин:
Это схема прямого подключения. Где: Ф-фаза питающего напряжения, N-нейтральный проводник, L1, L2 – обмотки двигателя, Ср – рабочий конденсатор.
А вот схема подключения преобразователя:
Как мы можем видеть, конденсатор при включении данной схемы отключается. Обмотка L1 переключается к выходу преобразователя фазы А, а L2 к В. Общий провод подключается к выходу С. Тем самым мы фактически получили двухфазную машину. Фазовый сдвиг теперь будет реализовывать частотный преобразователь, а не конденсатор. На выходе преобразователя будет обычное трехфазное напряжение.
Данный способ частотного регулирования трудно назвать однофазным, так как при питания двигателя от сети напрямую необходимо опять восстанавливать схему с конденсатором. Более того, этот способ регулирования частоты НЕ ПОДХОДИТ для машин с пусковой обмоткой, так как сопротивление рабочей и пусковой обмотки не равны, появится асимметрия.
Можем сделать вывод, что данный вид частотного регулирования подходит не всем электродвигателям, а только конденсаторным. Более того, при такой схеме подключения необходимо провести переподключение обмоток внутри электродвигателя (в коробке выводов электродвигателя), что после переподключения не позволит работать ему от сети напрямую. Поэтому если вы собираетесь питать электродвигатель от однофазной сети через частотник, то, может быть стоит купить преобразователь, который питается от однофазной сети, а двигатель обычный, трехфазный. Это лучше с точки зрения работы самой машины, также отсутствуют переделки внутри электрической машины. Если вы собираетесь таким образом модернизировать систему, то внимательно изучите характеристики электродвигателя, преобразователя, чтоб избежать пустой траты средств или выхода из строя элементов системы.
«>