Устройство и принцип действия синхронной машины
Устройство синхронных машин. Синхронные машины вне зависимости от режима работы состоят из двух основных частей: неподвижного статора, выполняющего функции якоря и ротора, вращающегося внутри статора и служащего индуктором (рис. 4.1).
 Статор трехфазной синхронной машины аналогичен статору трехфазного асинхронного двигателя. Он состоит из корпуса /, цилиндрического сердечника 2, набранного из отдельных пластин электротехнической стали, и трехфазной обмотки 3, уложенной в пазы сердечника.
Статор трехфазной синхронной машины аналогичен статору трехфазного асинхронного двигателя. Он состоит из корпуса /, цилиндрического сердечника 2, набранного из отдельных пластин электротехнической стали, и трехфазной обмотки 3, уложенной в пазы сердечника.
Ротор синхронной машины представляет собой электромагнит постоянного тока, который создает магнитное поле, вращающееся вместе с ротором. Ротор имеет обмотку возбуждения 4, которая через специальные контактные кольца 5 питается постоянным током от выпрямителя или от небольшого генератора постоянного тока, называемого возбудителем.
 В отечественной энергетике также используются синхронные машины с «бесщеточным» возбуждением. Обмотка ротора таких машин питается от выпрямителя, вращающегося вместе с ротором. Выпрямитель в свою очередь получает питание от возбудителя, имеющего вращающуюся вместе с ротором трехфазную обмотку, возбуждаемую неподвижными постоянными магнитами.
В отечественной энергетике также используются синхронные машины с «бесщеточным» возбуждением. Обмотка ротора таких машин питается от выпрямителя, вращающегося вместе с ротором. Выпрямитель в свою очередь получает питание от возбудителя, имеющего вращающуюся вместе с ротором трехфазную обмотку, возбуждаемую неподвижными постоянными магнитами.
Роторы синхронных машин бывают двух типов: с явно выраженными и неявно выраженными полюсами.

Большей механической прочностью обладает ротор с неявно выраженными полюсами. Он состоит (рис. 4.3) из сердечника 1 и обмотки возбуждения 2. Сердечник изготовляется из стальной поковки цилиндрической формы. На его внешней поверхности фрезеруются пазы, в которые закладывается обмотка возбуждения.
Обмотка возбуждения распределяется в пазах сердечника так, чтобы создаваемое ею магнитное поле было распределено в пространстве по закону, близкому к синусоидальному.
Принцип работы и ЭДС синхронного генератора. Работа синхронного генератора основана на явлении электромагнитной индукции. При холостом ходе обмотка якоря (статора) разомкнута, и магнитное поле машины образуется только обмоткой возбуждения ротора (рис. 4.4). При вращении ротора синхронного генератора от проводного двигателя ПД с постоянной частотой  , где B – магнитная индукция в воздушном зазоре между статором и ротором; l – активная длина проводника;
, где B – магнитная индукция в воздушном зазоре между статором и ротором; l – активная длина проводника; 

Выше отмечалось, что индукция В в воздушном зазоре распределена по синусоидальному закону  , где
, где  — угол, отсчитываемый от нейтральной линии, поэтому ЭДС в одном проводнике
— угол, отсчитываемый от нейтральной линии, поэтому ЭДС в одном проводнике  .
.
Обозначив 
 , т.е. ЭДС в проводниках обмоток статора изменяется по синусоидальному закону.
, т.е. ЭДС в проводниках обмоток статора изменяется по синусоидальному закону.
ЭДС отдельных проводников каждой обмотки статора сдвинуты по фазе относительно друг друга, поэтому они суммируются геометрически (аналогично ЭДС статора асинхронного двигателя – см. п. 3.8.1). Действующее значение ЭДС одной фазы определяется выражением:

 где
где 
 – частота синусоидальных ЭДС;
– частота синусоидальных ЭДС;  — число витков одной фазы обмотки статора;
— число витков одной фазы обмотки статора;  — число пар полюсов;
— число пар полюсов;  – максимальный магнитный поток полюса ротора;
– максимальный магнитный поток полюса ротора; 
Катушки отдельных фаз статора сдвинуты в пространстве на электрический угол, равный 1200, и их ЭДС образуют симметричную трёхфазную систему.
Изменяя ток возбуждения  , можно регулировать магнитный поток ротора и пропорциональную ему ЭДС
, можно регулировать магнитный поток ротора и пропорциональную ему ЭДС  генератора. На рис. 4.5 представлена зависимость
генератора. На рис. 4.5 представлена зависимость  , снятая при номинальной частоте вращения
, снятая при номинальной частоте вращения  .
.
Эта зависимость называется характеристикой холостого хода. Форма характеристики напоминает форму кривой намагничивания ферромагнитного сердечника. Характерной особенностью её является отсутствие пропорциональности между магнитным потоком  и током возбуждения
и током возбуждения
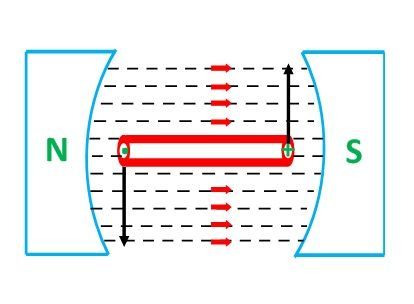
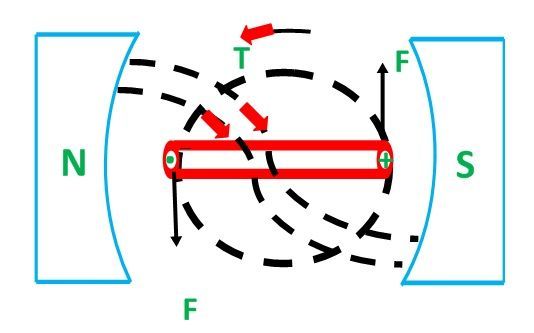
Принцип действия и вращающий момент синхронного двигателя. Принцип действия синхронного двигателя основан на явлении притяжения разноименных полюсов двух магнитных полей – статора и ротора. Вращающееся поле статора с полюсами N и S создается при питании обмоток статора от трёхфазной сети аналогично вращающемуся полю асинхронного двигателя (на рис. 4.6 полюсы статора N и S показаны штриховкой, вращаются они против часовой стрелки с частотой  ). Поле ротора создается постоянным током, протекающим по обмотке ротора.
). Поле ротора создается постоянным током, протекающим по обмотке ротора.
Предположим, что ротор каким-либо способом разогнан до синхронной частоты вращения  против часовой стрелки. Тогда полюсы ротора
против часовой стрелки. Тогда полюсы ротора  и
и  будут вращаться с частотой ; произойдет «сцепление» этих полюсов с разноименными полюсами статора
будут вращаться с частотой ; произойдет «сцепление» этих полюсов с разноименными полюсами статора 
 (см. штрихованные линии на рис. 4.6).
(см. штрихованные линии на рис. 4.6).
В режиме идеального холостого хода (момент сопротивления  ) оси магнитных полей статора и ротора совпадают (рис. 4.6.а). При этом на полюсы ротора действуют радиальные силы
) оси магнитных полей статора и ротора совпадают (рис. 4.6.а). При этом на полюсы ротора действуют радиальные силы 
 , которые не создают ни вращающего момента, ни момента сопротивления.
, которые не создают ни вращающего момента, ни момента сопротивления.
Если к валу машины приложить механическую нагрузку, которая создает момент сопротивления  , ось ротора и его полюсов , сместится в сторону отставания на угол
, ось ротора и его полюсов , сместится в сторону отставания на угол  (рис. 4.6,б). Теперь вращающее поле статора как бы “ведёт” за собой поле ротора и сам ротор. Тангенциальные составляющие
(рис. 4.6,б). Теперь вращающее поле статора как бы “ведёт” за собой поле ротора и сам ротор. Тангенциальные составляющие  и
и  создают вращающий момент
создают вращающий момент  , где
, где  — радиус ротора.
— радиус ротора.
Машина работает в двигательном режиме, её вращающий момент  преодолевает момент сопротивления механической нагрузки.
преодолевает момент сопротивления механической нагрузки.
При увеличении момента механической нагрузки на валу ротора угол увеличивается (до некоторого предела), что приводит к увеличению вращающегося момента двигателя  , причем частота вращения ротора остается неизменной и равной .
, причем частота вращения ротора остается неизменной и равной .
Противодействующий момент и противо-ЭДС. При работе синхронной машины в режиме нагруженного генератора (на схеме рис. 4.4,б нагрузка Zн подключена к обмоткам статора через выключатель Q) по обмоткам статора протекает ток, который создает своё вращающееся магнитное поле. В генераторном режиме, в отличие от двигательного режима, полюсы ротора опережают на угол полюсы магнитного поля статора. В результате взаимодействия разноименных полюсов статора и ротора на ротор действует момент, направленный против вращения, т.е. тормозной момент  . В установившемся режиме момент уравновешивает вращающийся момент приводного двигателя:
. В установившемся режиме момент уравновешивает вращающийся момент приводного двигателя:  .
.
При работе синхронной машины в режиме двигателя поле ротора пересекает витки трехфазной обмотки статора и в ней индуцируется ЭДС, которая согласно правилу Ленца действует навстречу току статора. По этой причине её называют противо-ЭДС. В установившемся режиме противо-ЭДС почти полностью уравновешивает напряжение сети  .
.
Таким образом, при работе синхронной машины на нагрузку (электрическую или механическую) в обмотке статора индуцируется ЭДС Е и возникает момент ротора  .
.
Реакция якоря в синхронной машине. Реакция якоря – это воздействие поля якоря (статора) на магнитное поле машины. При работе синхронной машины на нагрузку (электрическую в режиме генератора и механическую в режиме двигателя) по обмоткам статора (якоря) протекают синусоидальные токи, которые создают вращающееся магнитное поле статора. Ротор имеет частоту вращения , поэтому частота ЭДС и тока статора  , где — число пар полюсов машины. Частота вращения магнитного поля статора
, где — число пар полюсов машины. Частота вращения магнитного поля статора  . Следовательно, поля ротора и статора вращаются с одной и той же частотой ; они взаимодействуют между собой и образуют результирующее вращающееся магнитное поле машины. Взаимодействие полей зависит от характера нагрузки и режима работы машины.
. Следовательно, поля ротора и статора вращаются с одной и той же частотой ; они взаимодействуют между собой и образуют результирующее вращающееся магнитное поле машины. Взаимодействие полей зависит от характера нагрузки и режима работы машины.
Рассмотрим реакцию якоря на примере двухполюсного синхронного генератора с неявно выраженными полюсами ротора, работающего на различную по характеру нагрузку  .
.
При активной нагрузке с сопротивлением R ЭДС фазы обмотки статора и её ток совпадают по фазе и достигают максимума в тот момент, когда ось mm1 магнитного потока ротора Ф0 перпендикулярна оси nn1 катушки обмотки статора (например, АX на рис. 4.7,а). Магнитный поток статора Фя замыкается по сердечникам статора и ротора через воздушный зазор. Таким образом, в случае активной нагрузки ось потока ротора Ф0 опережает ось потока статора Фя на электрический угол, равный 900 (поперечная реакция якоря). При этом результирующий магнитный поток машины  (ось qq1) поворачивается относительно потока ротора Ф0 на угол в направлении, противоположном направлению вращению ротора.
(ось qq1) поворачивается относительно потока ротора Ф0 на угол в направлении, противоположном направлению вращению ротора.
При чисто индуктивной нагрузке XL ток в обмотке статора отстаёт от ЭДС на 900 и поэтому достигает максимума в тот момент времени, когда полюс ротора повернётся на 900 по направлению вращения (рис. 4.7,б). В этом случае магнитный поток статора оказывается направленным навстречу магнитному потоку ротора и размагничивает машину ().
При емкостной нагрузке XC ток в фазе статора опережает ЭДС на 900 и поэтому достигает максимума в тот момент, когда полюс ротора не доходит на 900 до оси mm1 (рис. 4.7,в). Магнитный поток статора в этом случае оказывается направленным согласно с магнитным потоком ротора и намагничивает машину ().

При работе синхронной машины в режиме двигателя ток в статоре при том же направлении вращения имеет противоположное направление. Ось результирующего потока двигателя оказывается повернута относительно потока ротора на угол , но не против направления вращения, как у генератора, а по направлению вращения.
Таким образом, реакция якоря в синхронной машине изменяет как поток машины, так и его направление (в отличие от асинхронной машины, у которой  ). Изменение Фрез приводит к изменению ЭДС, что неблагоприятно сказывается на работе потребителей электроэнергии при работе машины в режиме генератора. Уменьшение неблагоприятного влияния реакции якоря достигается уменьшением магнитного потока статора за счёт увеличения воздушного зазора между ротором и статором синхронной машины.
). Изменение Фрез приводит к изменению ЭДС, что неблагоприятно сказывается на работе потребителей электроэнергии при работе машины в режиме генератора. Уменьшение неблагоприятного влияния реакции якоря достигается уменьшением магнитного потока статора за счёт увеличения воздушного зазора между ротором и статором синхронной машины.
Асинхронно – слово греческого происхождения (ασύγχρονα, где: α- отрицание, σύγ — вместе, χρονα – время), используется в русском языке для обозначения (наименования) процессов не совпадающих во времени.
Асинхронной, в электротехнике, принято называть машину, в процессе работы которой частота вращения ротора не равна частоте изменения магнитного поля создаваемого обмотками статора, вызывающего это вращение.
К асинхронным электрическим машинам относятся: асинхронные двигатели с короткозамкнутым ротором, асинхронные двигатели с фазным ротором, асинхронные микродвигатели общего применения, асинхронные тахогенераторы и другие, работающие по тому же принципу. Асинхронные электрические машины очень широко распространены благодаря таким качествам как: высокая надёжность, относительно низкая стоимость, приемлемые габариты и вес, просты в обслуживании. С появлением современных частотных преобразователей значительно расширился спектр применения асинхронных электродвигателей, благодаря возможности довольно просто и оптимально реализовывать такие функции как управление по скорости и моменту, вплоть до решения задач позиционирования. Не удивительно, что асинхронные двигатели применяются повсюду, особенно это касается асинхронных электродвигателей, объём выпуска которых занимает около 90% общего объёма мирового выпуска электрических машин.
Принцип действия и режимы работы
Рассмотрим принцип работы асинхронного электродвигателя с помощью электромагнитной схемы (рис.1,а), которая отличается от электромагнитной схемы трансформатора тем, что неподвижный статор 1 представляет собой первичную обмотку, а вращающийся ротор 3 – вторичную. Магнитная связь между ротором и статором зависит от величины воздушного зазора между ними, поэтому, при изготовлении машины, в большинстве случаев, его стараются делать как можно меньше. На статоре расположена обмотка 2, катушки которой размещаются равномерно по его окружности. Обмотку статора (фазы A-X , B-Y, C-Z ) выполняют трёхфазной, или в общем случае многофазной, и соединяют её фазы в Y (звезду) или в  (треугольник), что оказывает существенное влияние на такие характеристики как: мощность, плавность хода, величины пусковых токов и других параметров. Обмотку ротора а-x, b-y, c-z также выполняют трёхфазной или многофазной и тоже равномерно размещают по его окружности. В простейшем случаях включения, фазы ротора а-x, b-y, c-z, замыкают накоротко (см. рис. 1,б).
(треугольник), что оказывает существенное влияние на такие характеристики как: мощность, плавность хода, величины пусковых токов и других параметров. Обмотку ротора а-x, b-y, c-z также выполняют трёхфазной или многофазной и тоже равномерно размещают по его окружности. В простейшем случаях включения, фазы ротора а-x, b-y, c-z, замыкают накоротко (см. рис. 1,б).
 Рис.1. Электромагнитная схема асинхронного двигателя (а – направление электромагнитного момента при работе в режиме двигателя, б – подключение к сети трёхфазного тока) , где: 1- неподвижный статор; 2- обмотка статора; 3- вращающийся ротор; 4- обмотка ротора.
Рис.1. Электромагнитная схема асинхронного двигателя (а – направление электромагнитного момента при работе в режиме двигателя, б – подключение к сети трёхфазного тока) , где: 1- неподвижный статор; 2- обмотка статора; 3- вращающийся ротор; 4- обмотка ротора.Когда обмотки статора асинхронной электрической машины подключены к сети трехфазного тока, в нём создаётся вращающееся магнитное поле, частота вращения которого (n1) синхронна с частотой сети, питающей эти обмотки, и вычисляется по формуле:
n1 = 60 x f1 / p
где: n1 – частота вращения магнитного поля статора; f1 – частота сети; p – число пар полюсов обмоток статора.
Вращающееся магнитное поле индуктирует в проводниках ротора электрической машины ЭДС, что вызывает прохождение по ним тока, взаимодействие которого с магнитным потоком создаёт электромагнитный момент. Направление ЭДС, индуктированной в проводниках обмоток ротора, показано на рисунке 1, а согласно правилу правой руки, для случая, когда вращении магнитного потока (Ф) происходит по часовой стрелке. Крестики и точки на рисунке показывают направление активной составляющей тока ротора, совпадающего по фазе с индуктированной ЭДС.
Известно, что если проводники с током расположить в магнитном поле, то на них будут действовать электромагнитые силы, направление которых можно определить при помощи правила левой руки. Приложенное к каждому проводнику ротора суммарное усилие (Fрез), создаёт электромагнитный момент (М), который “увлекает” ротор за вращающимся магнитным полем, создаваемым обмотками статора.
Ротор вращается, если величина момента (М) достаточна для преодоления внутренних сил трения (подшипники, сопротивление воздуха и так далее), а также тормозного момента, приложенного к валу от приводимого во вращение механизма, если таковой имеется. Установившаяся частота вращения ротора (n2) зависит от соотношения вышеперечисленных сил и создаваемых ими моментов. Очевидно, что при этом будет выполняться соотношение:
0 ≤ n2 <n1. Такой режим работы асинхронного электродвигателя называется двигательным. Разность частот n1 (вращения магнитного поля) и n2 (вращения ротора), выраженную в относительных единицах, принято называть скольжением. Наверное потому, что вращающееся магнитное поле статора “скользит” по обмоткам ротора “увлекая” ротор за собой, подобно скольжению потоков жидкости или воздуха по лопастям турбин гидравлических или пневматических машин.
Скольжение определяют по формуле:

где: s – скольжение; n1 – частота магнитного поля статора; n2 – частота вращения ротора. Скольжение также может быть представлено и в процентном соотношении:

Поскольку, при двигательном режиме выполняется соотношение 0 ≤ n2 <n1, то очевидно, что скольжения для этого режима будет находиться в пределах 1≥ S >0 (или 100%≥ S >0%).
Но асинхронная электрическая машина может работать и в других режимах. Если её ротор разогнать до частоты превышающей частоту магнитного поля статора (то есть n2>n1) при помощи внешнего момента другого механизма (например механически соединить с двигателем, вал которого вращается быстрее), то изменятся направление ЭДС и активной составляющей тока в проводниках обмотки ротора, что вызовет переход машины в генераторный режим работы (рис.2,а). Электромагнитный момент (М), при этом, становится тормозящим изменив своё направление, а электрическая машина, получая механическую энергию от внешнего источника, превращает её в электрическую и отдаёт в сеть, питающую обмотки статора. В генераторном режиме выполняются соотношения: n2>n1, S<0.
Если в момент работы асинхронного электродвигателя в двигательном режиме (когда 0 ≤ n2 <n1, а 1≥S >0) изменить направление вращения магнитного поля статора (например, изменив схему подключения обмоток статора к питающей сети с помощью магнитных пускателей), так чтобы магнитное поле статора стало вращаться противоположно направлению вращения ротора, то машина перейдёт в режим электромагнитного торможения (рис.2,б). При этом, ЭДС и активная составляющая тока в проводниках обмотки ротора будут сохранять (до определённого момента) то же направление, что и в прежнем двигательном режиме. Машина будет продолжать получать энергию от питающей сети, но эта энергия будет направлена на торможение вращения ротора. Электромагнитный момент (М), в данном режиме, как результат взаимодействия электромагнитных сил, направлен против вращения ротора и является тормозящим.
 Рис.2. Направление электромагнитного момента в асинхронной машине (а – при работе в генераторном режиме; б – при работе в режиме электромагнитного торможения).
Рис.2. Направление электромагнитного момента в асинхронной машине (а – при работе в генераторном режиме; б – при работе в режиме электромагнитного торможения).На практике, асинхронные двигатели чаще всего работают в двигательном режиме, что, в свою очередь, довольно часто не исключает применений режима электромагнитного торможения электродвигателей.
Итого, кратко повторим, асинхронный электродвигатель работает только при наличии скольжения, то есть неравенстве частот n1 и n2. Только в этом случае в обмотках ротора сможет индуктироваться ЭДС, и как следствие, возникать электромагнитный момент. Поскольку ротор вращается не синхронно с полем статора, машину называют асинхронной.

На практике иногда необходимо иметь согласованное вращение двух или нескольких механизмов, удаленных один от другого на большое расстояние или установленных таким образом, что механическое соединение их, например, при помощи общего вала невозможно или нецелесообразно. Можно в этих случаях использовать трехфазные асинхронные машины с контактными кольцами, которые при определенной схеме их соединения позволяют без общего механического вала осуществить согласованное вращение механизмов (или синхронную связь между ними). Такие асинхронные машины образуют «электрический вал». Схема их соединения, называется схемой электрического вала.
Рассмотрим наиболее часто применяемую схему электрического вала, представленную на рис. 3-112. Здесь показаны два приводных двигателя Д1 и Д11, которые связаны с рабочими механизмами через вал 1 и вал 11.
Рис. 3-112. Схема электрического вала.
Чтобы иметь согласованное вращение механизмов и, следовательно, приводных двигателей, с ними механически соединяются асинхронные машины с контактными кольцами A и В. Статорные обмотки последних приключаются к одной и той же сети трехфазного тока, а роторные обмотки соединяются параллельно через контактные кольца. При такой схеме включения машин А и В они будут выравнивать нагрузки двигателей Д1 и Д11 и в то же время поддерживать синхронное вращение обоих валов.
Когда машины неподвижны, то при одинаковом положении роторов относительно статоров они аналогичны двум параллельно включенным трансформаторам при их работе вхолостую. Если повернуть ротор одной машины при неподвижном роторе другой, то в роторных и соответственно в статорных обмотках возникнут токи. Они создадут в машинах вращающие моменты, которые будут направлены таким образом, чтобы восстановить прежнее положение роторов относительно статоров. Следовательно, на вал каждой машины будет действовать синхронизирующий момент, который будет возрастать с углом поворота ротора, но до известного предела. Если перейти этот предел, то синхронная связь между валами нарушается. Можно считать, что электрический вал осуществляет как бы эластичную связь между рабочими механизмами.
Передача момента при электрическом вале (как и при эластичном механическом) возможна не только при покое двух роторов, но и при их вращении, причем синхронная связь между ними будет сохраняться, если вследствие сдвига по фазе э.д.с. роторов будут возникать токи, необходимые для создания синхронизирующих моментов.
Большое практическое значение в настоящее время имеют малые асинхронные машины, применяемые для осуществления синхронной связи между элементами автоматических устройств. Они получили название сельсинов (Selsyn — сокращение английских слов self-synchronizing («самосинхронизирующийся»). Рассмотренные ранее трехфазные машины, при помощи которых осуществляется синхронная связь между относительно мощными механизмами, иногда называются силовыми сельсинами.) и по устройству представляют собой асинхронные машины с контактными кольцами, имеющие обычно на роторе трехфазную обмотку и на статоре однофазную или трехфазную. Однофазная обмотка статора часто выполняется в виде двух катушек, надетых на два явновыраженных полюса. Она получает питание от источника однофазного тока и называется обмоткой возбуждения. В этом случае сельсины называются однофазными. Трехфазная распределенная обмотка ротора соединяется в звезду. Она называется обмоткой синхронизации.
Статор и ротор такого сельсина собираются из листов электротехнической стали (рис. 3-114), причем ротор делается со скошенными пазами для ослабления зубцовых гармоник в кривых э.д.с. На контактные кольца накладываются щетки, обеспечивающие надежный контакт и малое переходное сопротивление.
Рис. 3-114. Листы статора и ротора однофазного сельсина
В настоящее время широкое применение нашли себе бесконтактные сельсины,. Эти сельсины не имеют скользящих контактов, что повышает надежность и точность их работы.
Устройство бесконтактного сельсина схематически представлено на рис. 3-115.
Рис. 3-115. Схема устройства бесконтактного сельсина.
Здесь ротор Р состоит из двух пакетов, набранных из листовой стали и разделенных косым промежутком П, заполненным немагнитным материалом. Листы ротора расположены параллельно оси вала, как показано на рисунке справа. Оба пакета заливаются алюминиевым сплавом и вместе с ним обрабатываются в виде цилиндра. Ротор не имеет никакой обмотки. Статор состоит из основного пакета С и двух боковых колец (тороидов) Т. Основной пакет статора С имеет пазы, в которых уложена трехфазная обмотка синхронизации. Она выполняется так же, как в обычной двухполюсной асинхронной машине. К тороидам примыкают пакеты внешнего магнитопровода М, набранные из полосок электротехнической стали. Они заливаются алюминиевым сплавом и образуют наружный цилиндрический корпус. Между тороидами и основным статорным пакетом помещаются кольцевые катушки В, охватывающие ротор. Они соединяются последовательно и образуют обмотку возбуждения. Как и в случае контактных сельсинов, обмотка возбуждения подключается к однофазной сети, а обмотка синхронизации — к линии связи.
Для выяснения принципа работы бесконтактного сельсина проследим путь магнитного потока, созданного катушками обмотки возбуждения. Примем, что в данный момент времени ток в катушках направлен, как указано на рис. 3-115. Тогда поток будет направлен справа налево. В правой части поток пойдет по стали ротора в аксиальном направлении до промежутка П, где он повернет , и пойдет вверх через зазор между ротором и основным пакетом статора С. Затем, пройдя зубцовый слой статора, поток поворачивает за плоскость чертежа (показано крестиком в кружке) и проходит вдоль ярма статора в его нижнюю часть (точка в кружке), откуда, снова пройдя зубцовый слой статора и зазор, он поступает в ротор, но уже слева от промежутка П. Далее, пройдя левую часть ротора, поток разделяется на две части и через тороиды и магнитопровод возвращается в правую часть ротора. Следовательно, поток, проходя через зубцовый слой статора, будет сцепляться с обмоткой синхронизации. Если поворачивать ротор, то потокосцепления фаз этой обмотки будут изменяться так же, как при повороте ротора контактного сельсина. По принципу действия бесконтактный и контактный сельсины не отличаются один от другого.
В зависимости от назначения и режимов работы различают: сельсины, работающие в индикаторном режиме; сельсины, работающие в трансформаторном режиме, и дифференциальные сельсины.
Однофазные сельсины, работающие в индикаторном режиме, образуют систему, состоящую из датчика и приемника или приемников. Рассмотрим случай, когда от одного датчика работает один приемник, обеспечивающий синхронный поворот или синхронное вращение индикатора (стрелки) в каком-либо пункте, удаленном на некоторое расстояние от датчика. Соответствующая схема включения сельсина-датчика (Д) и сельсина-приемника (П) показана на рис. 3-116.
Рис. 3-116. Схема соединения однофазных сельсинов при индикаторном режиме работы.
Здесь: ВД и ВП — обмотки возбуждения; СД и СП — обмотки синхронизации; Л — линия связи.
Если необходимо осуществить туже передачу, но к механизму, требующему относительно большого вращающего момента, то используется схема, представленная на рис. 3-117.
Рис. 3-117. Схема соединения при трансформаторном режиме работы сельсина СТ.
Если необходимо осуществить управление из двух пунктов, применяется дифференциальный сельсин. В отличие от ранее рассмотренных сельсинов он имеет на роторе и на статоре трехфазные обмотки и используется обычно в качестве приемника, а в качестве датчиков для него служат два однофазных сельсина (рис. 3-118).
Рис. 3-118. Схема управления дифференциальным сельсином-приемником ДС при помощи двух обычных сельсинов-датчиков Д1 и Д2.
Пуск синхронного двигателя
Синхронный двигатель не имеет начального пускового момента. Если его подключить к сети переменного тока, когда ротор неподвижен, а по обмотке возбуждения проходит постоянный ток, то за один период изменения тока электромагнитный момент будет дважды изменять свое направление, т.е. средний момент за период равняется нулю. При этих условиях двигатель не сможет прийти во вращение, так как его ротор, обладающий определенной инерцией, не может быть в течение одного полупериода разогнан до синхронной частоты вращения.
Следовательно, для пуска синхронного двигателя необходимо разогнать его ротор с помощью внешнего момента до частоты вращения, близкой к синхронный.
В настоящее время чаще всего применяют следующие способы пуска:
1. Асинхронный пуск.
При этом способе синхронный двигатель пускают как асинхронный, для чего его снабжают специальной короткозамкнутой пусковой обмоткой, выполненной по типу «беличья клетка». Чтобы увеличить сопротивление стержней, клетку изготавливают из латуни. После разгона ротора до частоты вращения, близкой к синхронной, на обмотку возбуждения подается напряжение и постоянный ток, проходящий по ней, создает синхронизирующий момент, который втягивает ротор в синхронизм.
2. Пуск при помощи вспомогательного двигателя.
Ротор возбужденного двигателя приводится во вращение до синхронной скорости и с помощью синхронизирующего устройства подключается к сети. После этого вспомогательный двигатель отключают.
В качестве пускового двигателя обычно используют асинхронный двигатель с числом полюсов на два меньше, чем у синхронного.
Недостатком данного способа является невозможность пуска двигателя под нагрузкой, так как нерационально иметь пусковой двигатель большой мощности.
3. Частотный пуск.
При частотном пуске синхронного двигателя частота питающего напряжения плавно изменяется от нуля до номинальной. При этом ротор вращается синхронно с магнитным полем статора.
Недостатками частотного пуска являются высокая стоимость преобразователя частоты, а также необходимость реализации сложных законов регулирования исходного напряжения и частоты в процессе разгона двигателя. Частотный пуск синхронных двигателей применяется в приводах специальных установок.
Синхронные двигатели имеют следующие достоинства:
1. Возможность работы при cos φ=1; это приводит к улучшению cos φ сети, а также к сокращению размеров двигателя, так как его ток меньше тока асинхронного двигателя той же мощности. При работе с опережающим током синхронные двигатели служат генераторами реактивной мощности, поступающей в асинхронные двигатели, что снижает потребление этой мощности от генераторов электростанций.
2. Меньшую чувствительность к колебаниям напряжения, так как их максимальный момент пропорционален напряжению в первой степени, а не квадрату напряжения.
3. Строгое постоянство частоты вращения независимо от механической нагрузки на валу.
Недостатки синхронных двигателей:
1. Сложность конструкции.
2. Сравнительная сложность пуска в ход.
3. Трудности с регулированием частоты вращения, которое возможно только путем изменения частоты питающего напряжения.
Указанные недостатки синхронных двигателей делают их менее выгодными, чем асинхронные двигатели, при ограниченных мощностях до 100кВт.
Однако при более высоких мощностях, когда особенно важно иметь высокий cos φ и уменьшенные габаритные размеры машины, синхронные двигатели предпочтительнее асинхронных.
Устройство синхронной машины — Студопедия
Конструктивная схема машины.Синхронные машины выполняют с неподвижным или вращающимся якорем. Машины большой мощности для удобства отвода электрической энергии со статора или подвода ее выполняют с неподвижным якорем (рис. 1.2, а)
Поскольку мощность возбуждения невелика по сравнению смощностью, снимаемой с якоря (0,3–3%), подвод постоянного тока к обмотке возбуждения с помощью двух колец не вызывает особых затруднений. Синхронные машины небольшой мощности выполняют как с неподвижным, так и с вращающимся якорем.

Рис. 1.2 – Конструктивная схема синхронной машины
с неподвижным и вращающимся якорем:
1 – якорь, 2 – обмотка якоря, 3 – полюсы индуктора,
4 – обмотка возбуждения, 5 – кольца и щетки
Синхронную, машину с вращающимся якорем и неподвижным индуктором (рис. 1.2, б )называют обращенной.

Рис. 1.3 – Роторы синхронной явнополюсной (а) и неявнополюсной (6) машин:
1 – сердечник ротора, 2 – обмотка возбуждения
Конструкция ротора. В машине с неподвижным якорем применяют две конструкции ротора: явнополюсную – с явно выраженными полюсами (рис. 1.3, а) и неявнополюсную – с неявно выраженными полюсами (рис. 1.3, б ). Явнополюсный ротор обычно используют в машинах с четырьмя и большим числом полюсов. Обмотку возбуждения выполняют в этом случае в виде цилиндрических катушек прямоугольного сечения, которые размещают на сердечниках полюсов и укрепляют при помощи полюсных наконечников. Ротор, сердечники полюсов и полюсные наконечники изготовляют из стали. Двух- и четырехполюсные машины большой мощности, работающие при частоте вращения ротора 1500 и 3000 об/мин, изготовляют, как правило, с неявнополюсным ротором. Применение в них явнополюсного ротора невозможно по условиям обеспечения необходимой механической прочности крепления полюсов и обмотки возбуждения. Обмотку возбуждения в такой машине размещают в пазах сердечника ротора, выполненного из массивной стальной поковки, и укрепляют немагнитными клиньями. Лобовые части обмотки, на которые воздействуют значительные центробежные силы, крепят при помощи стальных массивных бандажей. Для получения распределения магнитной индукции, близкого к синусоидальному, обмотку возбуждения укладывают в пазы, занимающие 2 /3 каждого полюсного деления.

Рис. 1.4 – Устройство явнополюсной машины:
1 – корпус, 2 – сердечник статора, 3 – обмотка статора, 4 – ротор,
5 – вентилятор, 6 – выводы обмотки статора, 7 – контактные кольца,
8 – щетки, 9 – возбудитель
На рис. 1–4 показано устройство явнополюсной синхронной машины. Сердечник статора собран из изолированных листов электротехнической стали и на нем расположена трехфазная обмотка якоря. На роторе размещена обмотка возбуждения.
Полюсным наконечникам в явнополюсных машинах обычно придают такой профиль, чтобы воздушный зазор между полюсным наконечником и статором был минимальным под серединой полюса и максимальным у его краев, благодаря чему кривая распределения индукции в воздушном зазоре приближается к синусоиде.
В синхронных двигателях с явнополюсным ротором в полюсных наконечниках размещают стержни пусковой обмотки (рис. 1–5), выполненной из материала с повышенным удельным сопротивлением (латуни и др.). Такую же обмотку (типа «беличья клетка»), состоящую из медных стержней, применяют и в синхронных генераторах; ее называют успокоительной или демпферной обмоткой, так как она обеспечивает быстрое затухание колебаний ротора, возникающих при переходных режимах работы синхронной машины. Если синхронная машина выполнена с массивными полюсами, то в этих полюсах при пуске и переходных режимах возникают вихревые токи, действие которых эквивалентно действию тока в короткозамкну-тых обмотках. Затухание колебаний ротора при переходных процессах обеспечивается в этом случае вихревыми токами, замыкающимися в массивном роторе.
Пуск синхронного двигателя. Пуск синхронного двигателя сопряжён с трудностями. Если статорную обмотку включить в трёхфазную сеть, а обмотку возбуждения питать от источника постоянного напряжения Uв (рис. 4.19), то ротор не сдвинется с места – из-за инерционности ротора вращающееся поле статора не успевает сцепиться с неподвижным полем ротора.
Распространение получил так называемый асинхронный пуск синхронного двигателя. Для осуществления асинхронного пуска ротор синхронного двигателя снабжается специальной пусковой короткозамкнутой обмоткой из медных или алюминиевых стержней типа беличьей клетки асинхронного короткозамкнутого двигателя. Пуск двигателя осуществляют следующим образом (рис. 4.19).
 Вначале обмотка возбуждения синхронного двигателя замыкается на пусковой реостат Rп, сопротивление которого в 8 – 10 раз больше, чем сопротивление обмотки возбуждения (если оставить обмотку возбуждения разомкнутой, то в ней при пуске вращающимся полем статора будет наводиться значительная ЭДС, опасная для изоляции). При включении обмотки статора на трёхфазное напряжение двигатель за счёт короткозамкнутой обмотки начинает работать как асинхронный. Когда частота вращения ротора двигателя достигает примерно 95% синхронной частоты вращения поля статора n0, пусковой реостат Rп отключают, а обмотку возбуждения ротора включают на постоянное напряжениеUв. Так как теперь частота вращения поля статора отличается незначительно от частоты поля вращающегося ротора, полюсы полей статора и ротора вступают во взаимодействие, двигатель втягивается в синхронизм и начинает работать как синхронный. В рабочем, т.е. в синхронном, режиме токи в пусковой короткозамкнутой обмотке не возникают и она в работе машины не участвует. Однако при кратковременных толчках механической нагрузки на валу в пусковой обмотке токи наводятся и создают момент, демпфирующий колебания ротора.
Вначале обмотка возбуждения синхронного двигателя замыкается на пусковой реостат Rп, сопротивление которого в 8 – 10 раз больше, чем сопротивление обмотки возбуждения (если оставить обмотку возбуждения разомкнутой, то в ней при пуске вращающимся полем статора будет наводиться значительная ЭДС, опасная для изоляции). При включении обмотки статора на трёхфазное напряжение двигатель за счёт короткозамкнутой обмотки начинает работать как асинхронный. Когда частота вращения ротора двигателя достигает примерно 95% синхронной частоты вращения поля статора n0, пусковой реостат Rп отключают, а обмотку возбуждения ротора включают на постоянное напряжениеUв. Так как теперь частота вращения поля статора отличается незначительно от частоты поля вращающегося ротора, полюсы полей статора и ротора вступают во взаимодействие, двигатель втягивается в синхронизм и начинает работать как синхронный. В рабочем, т.е. в синхронном, режиме токи в пусковой короткозамкнутой обмотке не возникают и она в работе машины не участвует. Однако при кратковременных толчках механической нагрузки на валу в пусковой обмотке токи наводятся и создают момент, демпфирующий колебания ротора.
К их недостаткам относятся большая кратность пускового тока, более высокая стоимость по сравнению с реактивными и частично гистерезисными двигателями, значительное снижение момента входа в синхронизм с увеличением момента инерции нагрузки, наличие тормозного (генераторного) момента в процессе пуска двигателя.
зультате взаимодействия поля постоянных магнитов с вращающимся полем статора втягивается в синхронизм.
Синхронизирующие свойства синхронных двигателей характеризуются в основном моментом входа в синхронизм Жвх — максимальным моментом сопротивления нагрузки, при котором двигатель еще втягивается в синхронизм.
Момент входа зависит от крутизны пусковой механической характеристики- М„’ в зоне малых скольжений и от момента выхода из синхронизма МВЫх.
Исследовать синхронизирующие свойства двигателя: а) определить моменты входа в синхронизм УИВХ и выхода из синхронизма Л1ВЫХ при и=И„ и 0,85 Uu’, б) определить моменты входа а синхронизм для двух различных моментов инерции нагрузки (•/Harp ~2.
Рассчитать кратности моментов (начального пускового, выхода из синхронизма и входа в синхронизм) и кратность пускового тока по отношению ‘К номинальным данным: /г„==Л1к/Л1н; kM =
Синхронизирующие свойства СДПМ определяются в основном такими техническими показателями, как момент входа в синхронизм Мвх и момент выхода из синхронизма УИВЫх.
Момент входа определяется максимальным моментом -нагрузки, при котором двигатель еще втягивается в синхронизм; момент выхода — моментом нагрузки, при котором двигатель вы-вадает из синхронизма.
Для этого синхронно работающий двигатель нагружают до выхода из синхронизма (при этом определяется максимальный синхронизирующий момент Мвых).
Основной технический показатель, определяющий синхронизирующие свойства СДПМ, — момент входа в синхронизм.
Что понимается под моментом входа двигателя в синхронизм?
Какие факторы влияют на момент входа двигателя в синхронизм?
Втягивание СРД в синхронизм происходит под действием синхронизирующего момента, который создается за счет разности магнитных проводимостей ротора по продольной и поперечной осям вследствие того, что явно выраженные полюса ротора стремятся расположиться по оси вращающегося поля статора.
Синхронизирующие свойства СРД определяются максимальным моментом нагрузки, при котором двигатель еще втягивается в синхронизм, — моментом входа в синхронизм Мвх.
Момент входа зависит от максимально синхронизирующего ‘момента (момента выхода из синхронизма МВых), момента инерции вращающихся масс /, крутизны пусковой механической характеристики Мп’ и может быть найден из приближенного решения уравнения движения ротора СРД: _____________ где Я=/(ос2/Р — инерционная постоянная вращающихся масс, причем сос = 2я/ — электрическая угловая скорость поля якоря; р — число пар полюсов.
Исследовать синхронизирующие свойства двигателя: а) определить момент входа в синхронизм Л1ВХ и момент выхода из синхронизма Мвых при С=СН\ й=и„ и U = 0,85UH; б) определить моменты входа и выхода при U=UH, С<СН и С>СН.
Рабочие и угловая характеристики двигателя снимаются одновременно при номинальных значениях напряжения питания и емкости конденсатора в диапазоне нагрузок от холостого хода до момента выхода ротора из синхронизма.
Основными техническими показателями СРД, характеризующими его синхронизирующие свойства, являются момент входа в синхронизм и момент выхода из синхронизма, который, кроме того, определяет перегрузочную способность двигателя.
Для этого синхронно работающий двигатель нагружают до выхода из синхронизма, при этом определяют момент выхода.
Момент входа в синхронизм, определяющий синхронизирующие свойства СРД, в значительной мере зависит от напряжения питания.
Объясняется это тем, что момент выхода из синхронизма и крутизна пусковой механической характеристики пропорциональны квадрату питающего напряжения (Л4Вых=?
Для того чтобы нагруженный ротор вошел в синхронизм, синхронизирующие силы должны совершить определенную работу, затрачиваемую на преодоление момента сопротивления нагрузки и увеличение кинетической энергии вращающихся масс.
С возрастанием момента инерции нагрузки кинетическая энергия при синхронной частоте вращения увеличивается и, следовательно, двигатель может втянуть в синхронизм нагрузку с уменьшенным моментом сопротивления.
Дайте определение момента входа в синхронизм и момента выхода из синхронизма.
Так как активное сопротивление ротора велико (SKP>1), то момент максимален при пуске и равен нулю при синхронизме (см.
Преимуществами синхронных гистерезисных двигателей, которые способствовали их быстрому распространению в технике, являются: большой пусковой момент и момент входа в синхронизм, плавность входа в синхронизм — отсутствие рывка, незначительное изменение тока (20—30%) при изменении нагрузки от короткого замыкания (пуск) до холостого хода, сравнительно высокий КПД
Рассчитать кратности момента выхода из синхронизма (до и после подмагничивания) и кратности начального пускового момента и пускового тока kM=-MBMJi/MH; kn=MK/Mn; feiWSK//H
При проведении данного эксперимента необходимо определить начальный пусковой момент Мк — момент при п = 0, момент входа в синхронизм УИвх — максимальный момент, при котором двигатель еще втягивается в синхронизм, и момент выхода из синхронизма Мвых— максимальный момент при синхронной скорости.
При определении рабочих характеристик после подмагничивания необходимо с помощью неоновой лампы следить за тем, чтобы ротор двигателя не выходил из синхронизма, так как даже кратковременный выход ротора из синхронизма приводит к его перемагничива-нию.
При исследовании двигателя после подмагничивания необходимо определить момент выхода из синхронизма и пусковой момент.
При проектировании, производстве и испытании электрических машин возникает необходимость в определении пусковых, максимальных и минимальных моментов у асинхронных и синхронных машин; моментов входа в синхронизм у синхронных машин.
ОПРЕДЕЛЕНИЕ МОМЕНТА ВХОДА В СИНХРОНИЗМ СИНХРОННЫХ ДВИГАТЕЛЕЙ С АСИНХРОННЫМ ПУСКОМ
При расчетах, проектировании и испытаниях синхронных микродвигателей первостепенное значение имеет определение предельного момента нагрузки, при котором происходит надежное втягивание ротора в синхронизм.
входа в синхронизм.
Процесс вхождения ротора синхронного двигателя в синхронизм является переходным электромеханическим процессом и описывает-•ся системой нелинейных дифференциальных уравнений синхронной машины.
Тогда исходным уравнением для исследования процесса вхождения в синхронизм синхронных двигателей <; асинхронным пуском является уравнение движения ротора (абс.
При выполнении этого условия момент входа в синхронизм не зависит от начального угла нагрузки.
5, на момент входа в синхронизм не-явнополюсного синхронного двигателя (а2 = 0).
Исследовать влияние угла сдвига моментно-угловых характеристик (ct = 0; л/4; я/2) на момент входа в синхронизм при Oi=l и а2 = 0,5.
Определить момент входа в синхронизм синхронного реактивного двигателя при а\, равных 0,5; 1,0; 1,5.
В процессе вхождения двигателя в синхронизм угол нагрузки изменяется в широких пределах.
6) является коэффициент предельной нагрузки аЗВх, при котором двигатель еще втягивается в синхронизм.
Исследование влияния коэффициента демпфирования на момент входа в синхронизм проводится для неявнополюсного двигателя.
Определение предельной нагрузки, при которой двигатель ещё втягивается в синхронизм, проводится для трех значений коэффициента демпфирования а\, равных 0,5; 1,0; 1,5.
значений коэффициента а^— (0~\)тм- При этом определяются два граничных значения нагрузки, незначительно отличающихся и удовлетворяющих следующему условию: при меньшей нагрузке двигатель еще втягивается в синхронизм, а при большей — продолжает работать в асинхронном режиме.
За момент входа в синхронизм принимается первое значение нагрузки.
Методика определения предельного коэффициента нагрузки, соответствующего моменту входа в синхронизм, изложена выше.
Методика определения момента входа в синхронизм реактивного двигателя такая же, как в предыдущих опытах.
Этим и объясняется увеличение момента входа двигателя в синхронизм с ростом коэффициента демпфирования.
Теоретически при Мае’->°° или /-»-0 момент входа в синхронизм достигает максимального значения синхронизирующего момента.
Что понимается под моментом входа в синхронизм?
Как зависит момент входа в синхронизм от момента инерции нагрузки?
Исследовать синхронизирующие свойства синхронных двигателей: а) определить моменты входа в синхронизм и выхода из синхронизма СДПМ и СРД; б) исследовать влияние степени возбужденности двигателя на его синхронизирующие свойства.
В процессе вхождения синхронных двигателей в синхронизм при больших моментах инерции нагрузки и малой крутизне пусковой механической характеристики частота вращения ротора может длительно превышать синхронную частоту вращения поля якоря.
Эти характеристики снимаются в диапазоне изменения нагрузки от нуля до момента выхода из синхронизма, Значение нагрузки устанавливается делителем эталонного напряжения.
Затем, уменьшая момент сопротивления, определяют два его значения, незначительно отличающихся и удовлетворяющих следующему условию: при меньшем значении момента нагрузки двигатель втягивается в синхронизм (а>я = шс), а при большем — — продолжает работать в асинхронном режиме (<он<с0о).
Синхронные компенсаторы.Синхронные компенсаторы – это синхронные машины, специально предназначенные для улучшения коэффициента мощности (cosφ) электрической сети. Они работают без механической нагрузки на валу (ток Ia мал) в перевозбуждённом режиме (правая ветвь U – образной характеристики Р=0 на рис. 4.20). Поскольку синхронные компенсаторы работают вхолостую и загружены только реактивным током Ip, они имеют облегчённую механическую конструкцию и, следовательно, меньшие размеры и массу.
23. Пуск синхронных двигателей. U-образные кривые и рабочие характеристики синхронного двигателя. Синхронный компенсатор.
Пуск синхронного двигателя. Пуск синхронного двигателя сопряжён с трудностями. Если статорную обмотку включить в трёхфазную сеть, а обмотку возбуждения питать от источника постоянного напряжения Uв (рис. 4.19), то ротор не сдвинется с места – из-за инерционности ротора вращающееся поле статора не успевает сцепиться с неподвижным полем ротора.
Распространение получил так называемый асинхронный пуск синхронного двигателя. Для осуществления асинхронного пуска ротор синхронного двигателя снабжается специальной пусковой короткозамкнутой обмоткой из медных или алюминиевых стержней типа беличьей клетки асинхронного короткозамкнутого двигателя. Пуск двигателя осуществляют следующим образом (рис. 4.19).
Вначале обмотка возбуждения синхронного двигателя замыкается на пусковой реостат Rп, сопротивление которого в 8 – 10 раз больше, чем сопротивление обмотки возбуждения (если оставить обмотку возбуждения разомкнутой, то в ней при пуске вращающимся полем статора будет наводиться значительная ЭДС, опасная для изоляции). При включении обмотки статора на трёхфазное напряжение двигатель за счёт короткозамкнутой обмотки начинает работать как асинхронный. Когда частота вращения ротора двигателя достигает примерно 95% синхронной частоты вращения поля статора n0, пусковой реостат Rп отключают, а обмотку возбуждения ротора включают на постоянное напряжениеUв. Так как теперь частота вращения поля статора отличается незначительно от частоты поля вращающегося ротора, полюсы полей статора и ротора вступают во взаимодействие, двигатель втягивается в синхронизм и начинает работать как синхронный. В рабочем, т.е. в синхронном, режиме токи в пусковой короткозамкнутой обмотке не возникают и она в работе машины не участвует. Однако при кратковременных толчках механической нагрузки на валу в пусковой обмотке токи наводятся и создают момент, демпфирующий колебания ротора.
U – образные характеристики.Зависимости I(Iв) при Uc = const и Р= const называются U – образными характеристиками. На рис. 4.18 изображены три такие характеристики для случаев Р=0 (режим холостого хода), некоторой мощности P1>0P2> P1. Минимум тока на характеристиках соответствует активному току, потребляемому двигателем  , левые ветви – перевозбуждённому двигателю и ёмкостному току.
, левые ветви – перевозбуждённому двигателю и ёмкостному току.
При уменьшении тока возбуждения Iв уменьшается ЭДС Е0 и угол  увеличивается
увеличивается  (рис.4.17).
(рис.4.17).
Штриховая кривая АВ на рис. 4.18 представляет собой границу устойчивости, на которой =90°.
Наиболее экономичным для самого синхронного двигателя является режим работы с  , так как двигатель развивает заданную механическую мощность при наименьшем, чисто активном токе статора.
, так как двигатель развивает заданную механическую мощность при наименьшем, чисто активном токе статора.

Обычно в эксплуатации синхронный двигатель перевозбуждают с целью улучшения cosφ сети. Режим перевозбуждения выгоден и тем, что уменьшается угол и возрастает перегрузочная способность двигателя. Вместе с этим следует учитывать, что обмотки статора двигателя рассчитаны на определённый ток  с точки зрения нагрева. Поэтому, чем больше загрузка двигателя активным током Ia (определяющим механическую мощность и момент на валу), тем меньше возможности использования двигателя в качестве генератора реактивной (ёмкостной) мощности за счёт реактивной составляющей тока Ip.
с точки зрения нагрева. Поэтому, чем больше загрузка двигателя активным током Ia (определяющим механическую мощность и момент на валу), тем меньше возможности использования двигателя в качестве генератора реактивной (ёмкостной) мощности за счёт реактивной составляющей тока Ip.
Синхронные компенсаторы.Синхронные компенсаторы – это синхронные машины, специально предназначенные для улучшения коэффициента мощности (cosφ) электрической сети. Они работают без механической нагрузки на валу (ток Ia мал) в перевозбуждённом режиме (правая ветвь U – образной характеристики Р=0 на рис. 4.20). Поскольку синхронные компенсаторы работают вхолостую и загружены только реактивным током Ip, они имеют облегчённую механическую конструкцию и, следовательно, меньшие размеры и массу.
24. Синхронный компенсатор
Синхронные компенсаторы.Синхронные компенсаторы – это синхронные машины, специально предназначенные для улучшения коэффициента мощности (cosφ) электрической сети. Они работают без механической нагрузки на валу (ток Ia мал) в перевозбуждённом режиме (правая ветвь U – образной характеристики Р=0 на рис. 4.20). Поскольку синхронные компенсаторы работают вхолостую и загружены только реактивным током Ip, они имеют облегчённую механическую конструкцию и, следовательно, меньшие размеры и массу.
25. Синхронные машины специального назначения. Назначение, конструкция, принцип действия, рабочие характеристики реактивного, гистерезисного синхронного двигателей, шагового электродвигателя.
Разница между синхронным и асинхронным двигателем объясняется с учетом таких факторов, как его тип, скольжение, потребность в дополнительном источнике питания, требование к контактному кольцу и щеткам, их стоимость, эффективность, коэффициент мощности, ток питания, скорость, самозапуск , влияют на крутящий момент из-за изменения напряжения, их рабочей скорости и различных применений как синхронного, так и асинхронного двигателя.
Различие между синхронным и асинхронным двигателем объяснено ниже в табличной форме.
| ОСНОВА | СИНХРОННЫЙ МОТОР | АСИНХРОННЫЙ МОТОР |
|---|---|---|
| Определение | Синхронный двигатель — это машина, скорость вращения которой и скорость вращения магнитного поля статора равны. N = NS = 120f / P | Асинхронный двигатель — это машина, ротор которой вращается со скоростью, меньшей синхронной. N |
| Тип | Бесщеточный двигатель, двигатель с переменным сопротивлением, двигатель с переключаемым сопротивлением и двигатель с гистерезисом являются синхронными двигателями. | Асинхронный двигательпеременного тока известен как асинхронный двигатель. |
| Слип | Не имеет слипа. Значение скольжения равно нулю. | Имеют проскальзывание, поэтому значение проскальзывания не равно нулю. |
| Дополнительный источник питания | Требуется дополнительный источник питания постоянного тока для первоначального вращения ротора вблизи синхронной скорости. | Не требует дополнительного источника запуска. |
| Кольцо скольжения и щетки | Требуется кольцо скольжения и щетки | Кольцо скольжения и щетки не требуются. |
| Стоимость | Синхронный двигатель стоит дороже по сравнению с асинхронным двигателем | Менее затратный |
| КПД | КПД выше, чем у асинхронного двигателя. | Менее эффективный |
| Коэффициент мощности | Изменяя возбуждение, коэффициент мощности можно соответственно отрегулировать как отставание, опережение или единица. | Асинхронный двигатель работает только с запаздывающим коэффициентом мощности. |
| Источник тока | Ток подается на ротор синхронного двигателя | Ротор асинхронного двигателя не требует тока. |
| Скорость | Скорость двигателя не зависит от изменения нагрузки. Это постоянно. | Скорость асинхронного двигателя уменьшается с увеличением нагрузки. |
| Самостоятельный запуск | Синхронный двигатель не запускается самостоятельно | Это автоматический запуск |
| Влияние крутящего момента | Изменение приложенного напряжения не влияет на крутящий момент синхронного двигателя | Изменение приложенного напряжения влияет на крутящий момент асинхронного двигателя |
| Рабочая скорость | Они работают плавно и относительно хорошо на низкой скорости, которая ниже 300 об / мин. | Скорость двигателя выше 600 об / мин работает отлично. |
| Применения | Синхронные двигатели используются на электростанциях, в обрабатывающей промышленности и т. Д., А также в качестве регулятора напряжения. | Используется в центробежных насосах и вентиляторах, воздуходувках, бумажных и текстильных фабриках, компрессорах и подъемниках. и т. д. |
Синхронный двигатель — это двигатель, который работает с синхронной скоростью, то есть частота вращения ротора равна частоте вращения статора двигателя.Он следует соотношению N = N S = 120f / P, где N — скорость ротора, а Ns — синхронная скорость.
Асинхронный двигатель — это асинхронный двигатель переменного тока. Ротор асинхронного двигателя вращается со скоростью, меньшей синхронной, то есть N
Подробное объяснение разницы между синхронным и асинхронным двигателем приведено ниже.
- Синхронный двигатель — это машина, скорость вращения которой и скорость магнитного поля статора равны.Асинхронный двигатель — это машина, ротор которой вращается со скоростью, меньшей синхронной.
- Бесщеточный двигатель, двигатель с переменным сопротивлением, двигатель с переключаемым сопротивлением и двигатель с гистерезисом являются синхронными двигателями. Асинхронный двигатель переменного тока известен как асинхронный двигатель.
- Синхронный двигатель не имеет скольжения. Значение скольжения равно нулю. Асинхронный двигатель имеет скольжение, поэтому значение скольжения не равно нулю.
- Синхронному двигателю требуется дополнительный источник питания постоянного тока для первоначального вращения ротора вблизи синхронной скорости.Асинхронный двигатель не требует дополнительного источника запуска.
- Кольцо скольжения и щетки требуются в синхронном двигателе, тогда как асинхронный двигатель не требует кольца скольжения и щеток. Только для асинхронного двигателя намоточного типа требуются контактное кольцо и щетки.
- Синхронный двигатель является дорогостоящим по сравнению с асинхронным двигателем.
- КПД синхронного двигателя выше, чем у асинхронного двигателя.
- Изменяя возбуждение, коэффициент мощности Синхронного двигателя можно соответствующим образом отрегулировать как запаздывающий, опережающий или единичный, тогда как асинхронный двигатель работает только с запаздывающим коэффициентом мощности.
- Ток подается на ротор синхронного двигателя. Ротор асинхронного двигателя не требует тока.
- Скорость синхронного двигателя не зависит от изменения нагрузки. Это постоянно. Скорость асинхронного двигателя уменьшается с увеличением нагрузки.
- Синхронный двигатель не запускается самостоятельно, тогда как асинхронный двигатель запускается самостоятельно.
- Изменение приложенного напряжения не влияет на крутящий момент синхронного двигателя, тогда как оно влияет на крутящий момент асинхронного двигателя.
- Синхронный двигатель работает плавно и относительно хорошо на низкой скорости, которая ниже 300 об / мин, тогда как скорость выше 600 об / мин. Асинхронный двигатель работает превосходно. Асинхронные двигатели используются в центробежных насосах и вентиляторах, воздуходувках, бумажных и текстильных фабриках, компрессорах и подъемниках. и т. д.
- Различные применения Синхронного двигателя заключаются в том, что он используется на электростанциях, в обрабатывающей промышленности и т. Д. Он также используется в качестве регулятора напряжения.
Синхронная машина состоит из синхронных двигателей, а также синхронных генераторов. Система переменного тока имеет некоторые преимущества перед системой постоянного тока. Поэтому система переменного тока используется исключительно для выработки, передачи и распределения электроэнергии. Машина, которая преобразует механическую энергию в электрическую энергию переменного тока, называется Синхронный генератор или Генератор переменного тока. Однако, если одна и та же машина может работать в качестве двигателя, это называется синхронным двигателем .
Синхронная машина — это машина переменного тока, удовлетворительная работа которой зависит от соблюдения следующих отношений.
Где,
- N с — синхронная скорость в оборотах в минуту (об / мин)
- — частота питания
- P — количество полюсов машины.
При подключении к электрической системе синхронная машина всегда поддерживает вышеуказанное соотношение, показанное в уравнении (1).
Если синхронная машина, работающая как двигатель, не может поддерживать среднюю скорость (N с ), машина не будет развивать достаточный крутящий момент для поддержания вращения и остановится. Тогда говорят, что двигатель не работает.
В случае, когда синхронная машина работает как генератор, она должна работать с фиксированной скоростью, называемой синхронной скоростью, чтобы генерировать энергию на определенной частоте. Как все приборы или машины предназначены для работы на этой частоте.В некоторых странах значение частоты составляет 50 герц.
Основные принципы синхронной машины
Синхронная машина — это просто электромеханический преобразователь, который преобразует механическую энергию в электрическую энергию или наоборот. Фундаментальное явление или закон, который делает возможными эти преобразования, известны как закон электромагнитной индукции и закон взаимодействия и .
Подробное описание поясняется ниже.
Закон об электромагнитной индукции
Этот закон также называется первым законом Фарадея об электромагнитной индукции.Этот закон относится к производству ЭДС, т.е. ЭДС индуцируется в проводнике всякий раз, когда он пересекает магнитное поле, как показано ниже.
 Закон взаимодействия
Закон взаимодействия
 Закон взаимодействия
Закон взаимодействия Этот закон относится к производству силы или крутящего момента, т. Е. Всякий раз, когда токопроводящий проводник помещается в магнитное поле, в результате взаимодействия магнитного поля, создаваемого токонесущим проводником и основным полем, на проводник действует сила производящий крутящий момент. Рисунок показан ниже.
Трехфазная синхронная машина
- Машина, используемая в бытовых приборах, например, небольшая машина, используемая в воздухоохладителях, холодильниках, вентиляторах, кондиционерах и т. Д.
- Однако большие машины переменного тока являются синхронными машинами трехфазного типа по следующим причинам.
- При одинаковом размере рамы производительность трехфазных машин почти в 1,5 раза выше, чем у однофазных машин.
- Трехфазная мощность передается и распределяется более экономично, чем однофазная.
- Трехфазные двигатели запускаются самостоятельно (кроме синхронных двигателей).
- Трехфазные двигатели имеют абсолютно равномерный непрерывный крутящий момент, тогда как однофазные двигатели имеют пульсирующий крутящий момент.
В небольшой синхронной машине обмотка поля размещается на статоре, а обмотка якоря размещается на роторе, тогда как для большой синхронной машины обмотка возбуждения размещается на роторе, а обмотка якоря размещается на статоре.
,Различие между асинхронным двигателем и Синхронный двигатель объясняется с помощью различных факторов, таких как тип возбуждения, используемый для машины. Скорость двигателя, запуск и работа, эффективность обоих двигателей, их стоимость, использование и применение. частота.
| ОСНОВЫ РАЗЛИЧНЫХ | СИНХРОННЫЙ МОТОР | ИНДУКЦИОННЫЙ МОТОР |
|---|---|---|
| Тип возбуждения | Синхронный двигатель — это машина с двойным возбуждением. | Асинхронный двигатель — это машина с одним возбуждением. |
| Система питания | Его обмотка якоря запитывается от источника переменного тока, а обмотка возбуждения — от источника постоянного тока. | Его обмотка статора запитывается от источника переменного тока. |
| Скорость | Он всегда работает с синхронной скоростью. Скорость не зависит от нагрузки. | Если нагрузка увеличивается, скорость асинхронного двигателя уменьшается. Это всегда меньше, чем синхронная скорость. |
| Начиная с | Это не самостоятельное начало. Он должен быть настроен на синхронную скорость любым способом, прежде чем его можно будет синхронизировать с источником переменного тока. | Асинхронный двигатель имеет собственный пусковой момент. |
| Эксплуатация | Синхронный двигатель может работать с запаздывающей и опережающей мощностью путем изменения его возбуждения. | Асинхронный двигатель работает только с запаздывающим коэффициентом мощности. При высоких нагрузках коэффициент мощности становится очень плохим. |
| Использование | Может использоваться для коррекции коэффициента мощности в дополнение к подаче крутящего момента для привода механических нагрузок. | Асинхронный двигатель используется только для привода механических нагрузок. |
| Эффективность | Это более эффективно, чем асинхронный двигатель с той же мощностью и выходным напряжением. | Его эффективность ниже, чем у синхронного двигателя с той же мощностью и номинальным напряжением. |
| Стоимость | Синхронный двигатель стоит дороже, чем асинхронный двигатель с тем же самым выходом и напряжением | Асинхронный двигатель дешевле, чем синхронный двигатель с тем же самым выходом и напряжением. |
Асинхронный двигатель также известен как Асинхронный двигатель . Это так называется, потому что он никогда не работает на синхронной скорости. то есть N с = 120f / P. Асинхронный двигатель является наиболее широко используемым двигателем во всех бытовых и коммерческих двигателях. Синхронный двигатель всегда следует за синхронной скоростью. Скорость вращения ротора поддерживается или синхронизируется с током питания
Разница между трехфазным асинхронным двигателем и синхронным двигателем
- Трехфазный синхронный двигатель — это машина с двойным возбуждением, тогда как асинхронный двигатель — это машина с одним возбуждением.
- Обмотка якоря синхронного двигателя запитывается от источника переменного тока, а его обмотка возбуждения — от источника постоянного тока. На обмотку статора асинхронного двигателя подается питание от источника переменного тока.
- Синхронный двигатель всегда работает с синхронной скоростью, и скорость двигателя не зависит от нагрузки, но асинхронный двигатель всегда работает меньше, чем синхронная скорость. Если нагрузка увеличивается, скорость асинхронного двигателя уменьшается.
- Асинхронный двигатель имеет самозапускающий момент, тогда как синхронный двигатель не самозапускающийся.Он должен быть настроен на синхронную скорость любым способом, прежде чем его можно будет синхронизировать с источником переменного тока.
- Синхронный двигатель может работать с отставанием и опережающей мощностью, изменяя его возбуждение. Асинхронный двигатель работает только с запаздывающим коэффициентом мощности. При высоких нагрузках коэффициент мощности асинхронного двигателя становится очень плохим.
- Синхронный двигатель может использоваться для коррекции коэффициента мощности в дополнение к крутящему моменту, необходимому для привода механических нагрузок, тогда как асинхронный двигатель используется только для привода механических нагрузок.
- Синхронный двигатель более эффективен, чем асинхронный двигатель с той же мощностью и выходным напряжением.
- Синхронный двигатель стоит дороже, чем асинхронный двигатель с той же мощностью и выходным напряжением.
 В предыдущей статье мы обсуждали последовательную и параллельную передачу. Как мы знаем в Serial Transmission, данные передаются побитно, таким образом, что каждый бит следует за другим. Это два типа, а именно, Синхронная и Асинхронная передача .
В предыдущей статье мы обсуждали последовательную и параллельную передачу. Как мы знаем в Serial Transmission, данные передаются побитно, таким образом, что каждый бит следует за другим. Это два типа, а именно, Синхронная и Асинхронная передача .
Одно из основных отличий заключается в том, что в синхронной передаче отправитель и получатель должны иметь синхронизированные часы перед передачей данных.Принимая во внимание, что асинхронная передача не требует часов, но добавляет бит четности к данным перед передачей.
Кроме того, синхронная передача использует символы синхронизации, в то время как асинхронный метод использует стартовые / стоповые биты, чтобы предупредить модем, когда данные отправляются и когда эти передачи завершены, называются символами сообщения.
Содержимое: Синхронная и Асинхронная передача
- Сравнительная таблица
- Определение
- Ключевые отличия
- Заключение
Сравнительная таблица
| Основа для сравнения | Синхронная передача | Асинхронная передача |
|---|---|---|
| Значение | Передача начинается с заголовка блока, который содержит последовательность битов. | Используются стартовый бит и стоповый бит, предшествующий и следующий за символом соответственно. |
| Способ передачи | Отправляет данные в виде блоков или кадров | Отправляет 1 байт или символ за раз |
| Синхронизация | Присутствует с тем же тактовым импульсом. | Отсутствует |
| Скорость передачи | Быстрая | Медленная |
| Разрыв между данными | Не существует | Существует |
| Стоимость | Дорого | Экономичный |
| Интервал времени | Константа | Случайный |
| Реализовано | Аппаратное и программное обеспечение | Аппаратное обеспечение только |
| Примеры | Чаты, Видеоконференции, Телефонные разговоры и так далее. | Письма, электронные письма, форумы и так далее. |
Определение синхронной передачи
В синхронной передачи данные передаются в дуплексном режиме в виде блоков или кадров. Синхронизация между отправителем и получателем необходима для того, чтобы отправитель знал, где начинается новый байт (поскольку между данными нет пропуска). Поэтому каждый блок символов помечается символами синхронизации, и приемное устройство получает данные до тех пор, пока не будет идентифицирован специальный конечный символ. Синхронная передача эффективна, надежна и используется для передачи большого количества данных. Он обеспечивает связь в реальном времени между подключенными устройствами. Чаты, видеоконференции, телефонные разговоры, а также личные встречи являются одними из примеров синхронной передачи.
Синхронная передача эффективна, надежна и используется для передачи большого количества данных. Он обеспечивает связь в реальном времени между подключенными устройствами. Чаты, видеоконференции, телефонные разговоры, а также личные встречи являются одними из примеров синхронной передачи.
Голосовые и широкополосные каналы обычно используются в режимах синхронной передачи, поскольку они обеспечивают более высокую скорость до 1200 бит / с и служат для высокой скорости передачи данных.
Определение асинхронной передачи
В асинхронной передачи данные передаются в полудуплексном режиме, 1 байт или символ за раз. Он передает данные в непрерывном потоке байтов. Как правило, размер отправляемого символа составляет 8 битов, к которым добавляется бит четности, то есть стартовый и стоповый бит, который дает в общей сложности 10 битов.
Не требует часов для синхронизации; скорее он использует биты четности, чтобы сообщить получателю, как интерпретировать данные.Эти биты четности известны как стартовые и стоповые биты, которые управляют передачей данных. 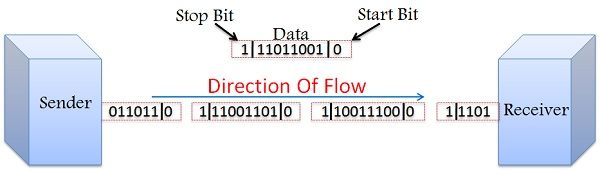 Он использует символьную синхронизацию, чтобы принимающий терминал мог синхронизироваться с получением данных о символе. Это просто, быстро, экономично и не требует двусторонней связи. Письма, электронные письма, форумы, телевизоры и радио являются одними из примеров асинхронной передачи.
Он использует символьную синхронизацию, чтобы принимающий терминал мог синхронизироваться с получением данных о символе. Это просто, быстро, экономично и не требует двусторонней связи. Письма, электронные письма, форумы, телевизоры и радио являются одними из примеров асинхронной передачи.
Каналы голосового диапазона, которые имеют узкий тип и работают на более медленной скорости, используются в асинхронной передаче.Здесь передающее устройство работает вручную или периодически.
Ключевые различия между синхронной и асинхронной передачей
- В синхронной передаче данные передаются в форме кадров. С другой стороны, в асинхронной передаче данные передаются по 1 байту за раз.
- Синхронная передача требует тактового сигнала между отправителем и получателем, чтобы сообщить получателю о новом байте. В отличие от этого, в асинхронной передаче отправителю и получателю не требуется тактовый сигнал, поскольку отправленные здесь данные имеют присоединенный бит четности, который указывает начало нового байта.
- Скорость передачи данных при асинхронной передаче ниже, чем при синхронной передаче. Асинхронная передача
- проста и экономична, тогда как синхронная передача сложна и дорога.
- Синхронная передача эффективна и имеет меньшие издержки по сравнению с асинхронной передачей.
- При асинхронной передаче данных строка поддерживается на стабильном значении (логика 1), если по линии не передаются данные. В отличие от этого, при синхронной передаче конец данных указывается символом (ами) синхронизации.Помимо символов синхронизации, строка может быть как высокой, так и низкой.
Заключение
Синхронная и асинхронная передача имеют свои преимущества и недостатки. Асинхронный прост, экономичен и используется для передачи небольшого количества данных.
И наоборот, синхронная передача используется для передачи большого объема данных, поскольку она эффективна и имеет меньшие накладные расходы. Следовательно, мы заключаем, что синхронная и асинхронная передача необходимы для передачи данных.
,