Расчет номинального тока электродвигателя | Заметки электрика
Здравствуйте, уважаемые читатели и гости сайта «Заметки электрика».
Решил написать статью о расчете номинального тока для трехфазного электродвигателя.
Этот вопрос является актуальным и кажется на первый взгляд не таким и сложным, но почему-то в расчетах зачастую возникают ошибки.
В качестве примера для расчета я возьму трехфазный асинхронный двигатель АИР71А4 мощностью 0,55 (кВт).
Вот его внешний вид и бирка с техническими данными.
Если двигатель Вы планируете подключать в трехфазную сеть 380 (В), то значит его обмотки нужно соединить по схеме «звезда», т.е. на клеммнике необходимо соединить выводы V2, U2 и W2 между собой с помощью специальных перемычек.
При подключении этого двигателя в трехфазную сеть напряжением 220 (В) его обмотки необходимо соединить треугольником, т.е. установить три перемычки: U1-W2, V1-U2 и W1-V2.
Если же Вы решите подключить этот двигатель в однофазную сеть 220 (В), то его обмотки также должны быть соединены треугольником.
Для информации: почитайте подробную статью о схемах соединения обмоток в «звезду» и «треугольник».
Для правильного выбора автоматического выключателя (или предохранителей) и тепловых реле для защиты двигателя, а также для выбора контактора для его управления, в первую очередь нам нужно знать номинальный ток двигателя для конкретной схемы соединения обмоток.
Обычно, номинальные токи указаны прямо на бирке, поэтому можно смело ориентироваться на них. Но иногда циферки не видны или стерты, а известна только лишь мощность двигателя или другие его параметры.
Такое очень часто встречается, но еще чаще бирка вообще отсутствует или так затерта, что на ней абсолютно ничего не видно — приходится только догадываться, что там изображено.
Но это отдельный случай и что делать в таких ситуациях, я расскажу Вам в ближайшее время.
В данной же статье я хочу акцентировать Ваше внимание на формулу по расчету тока двигателя, потому что даже не все «специалисты» ее знают, хотя может и знают, но не хотят вспомнить основы электротехники.
Итак, приступим.
Внимание! Мощность на шильдике двигателя указывается не электрическая, а механическая, т.е. полезная механическая мощность на валу двигателя. Об этом отчетливо говорится в действующем ГОСТ Р 52776-2007, п.5.5.3:
Полезную механическую мощность обозначают, как Р2.
Чаще всего мощность двигателя указывают не в ваттах (Вт), а в киловаттах (кВт). Для тех кто забыл, читайте статью о том, как перевести ватты в киловатты и наоборот.
Еще реже, на бирке указывают мощность в лошадиных силах (л.с.), но такого я ни разу еще не встречал на своей практике. Для информации: 1 (л.с.) = 745,7 (Ватт).
Но нас интересует именно электрическая мощность, т.е. мощность, потребляемая двигателем из сети. Активная электрическая мощность обозначается, как Р1 и она всегда будет больше механической мощности Р2, т.к. в ней учтены все потери двигателя.
1. Механические потери (Рмех.)
К механическим потерям относятся трение в подшипниках и вентиляция. Их величина напрямую зависит от оборотов двигателя, т.е. чем выше скорость, тем больше механические потери.
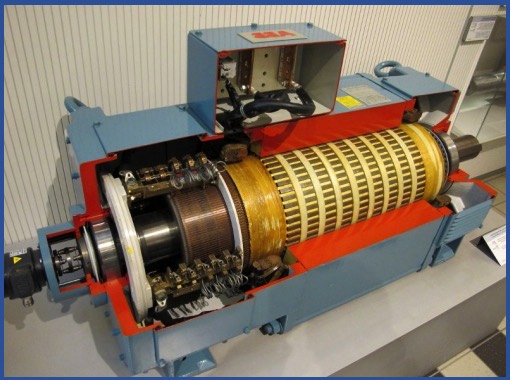
У асинхронных трехфазных двигателей с фазным ротором еще учитываются потери между щетками и контактными кольцами. Более подробно об устройстве асинхронных двигателей Вы можете почитать здесь.
2. Магнитные потери (Рмагн.)
Магнитные потери возникают в «железе» магнитопровода. К ним относятся потери на гистерезис и вихревые токи при перемагничивании сердечника.
Величина магнитных потерь в статоре зависит от частоты перемагничивания его сердечника. Частота всегда постоянная и составляет 50 (Гц).
Магнитные потери в роторе зависят от частоты перемагничивания ротора. Эта частота составляет 2-4 (Гц) и напрямую зависит от величины скольжения двигателя. Но магнитные потери в роторе имеют малую величину, поэтому в расчетах чаще всего не учитываются.
3. Электрические потери в статорной обмотке (Рэ1)
Электрические потери в обмотке статора вызваны их нагревом от проходящих по ним токам. Чем больше ток, чем больше нагружен двигатель, тем больше электрические потери — все логично.
4. Электрические потери в роторе (Рэ2)
Электрические потери в роторе аналогичны потерям в статорной обмотке.
5. Прочие добавочные потери (Рдоб.)
К добавочным потерям можно отнести высшие гармоники магнитодвижущей силы, пульсацию магнитной индукции в зубцах и прочее. Эти потери очень трудно учесть, поэтому их принимают обычно, как 0,5% от потребляемой активной мощности Р1.
Все Вы знаете, что в двигателе электрическая энергия преобразуется в механическую. Если объяснить чуть подробнее, то при подведенной к двигателю электрической активной мощности Р1, некоторая ее часть затрачивается на электрические потери в обмотке статора и магнитные потери в магнитопроводе. Затем остаточная электромагнитная мощность передается на ротор, где она расходуется на электрические потери в роторе и преобразуется в механическую мощность. Часть механической мощности уменьшается за счет механических и добавочных потерь. В итоге, оставшаяся механическая мощность — это и есть полезная мощность Р2 на валу двигателя.
Все эти потери и заложены в единственный параметр — коэффициент полезного действия (КПД) двигателя, который обозначается символом «η» и определяется по формуле:
η = Р2/Р1
Кстати, КПД примерно равен 0,75-0,88 для двигателей мощностью до 10 (кВт) и 0,9-0,94 для двигателей свыше 10 (кВт).
Еще раз обратимся к данным, рассматриваемого в этой статье двигателя АИР71А4.
На его шильдике указаны следующие данные:
- тип двигателя АИР71А4
- заводской номер № ХХХХХ
- род тока — переменный
- количество фаз — трехфазный
- частота питающей сети 50 (Гц)
- схема соединения обмоток ∆/Y
- номинальное напряжение 220/380 (В)
- номинальный ток при треугольнике 2,7 (А) / при звезде 1,6 (А)
- номинальная полезная мощность на валу Р2 = 0,55 (кВт) = 550 (Вт)
- частота вращения 1360 (об/мин)
- КПД 75% (η = 0,75)
- коэффициент мощности cosφ = 0,71
- режим работы S1
- класс изоляции F
- класс защиты IP54
- название предприятия и страны изготовителя
- год выпуска 2007
Расчет номинального тока электродвигателя
В первую очередь необходимо найти электрическую активную потребляемую мощность Р1 из сети по формуле:
Р1 = Р2/η = 550/0,75 = 733,33 (Вт)
Величины мощностей подставляются в формулы в ваттах, а напряжение — в вольтах. КПД (η) и коэффициент мощности (cosφ) — являются безразмерными величинами.
Но этого не достаточно, потому что мы не учли коэффициент мощности (cosφ), а ведь двигатель — это активно-индуктивная нагрузка, поэтому для определения полной потребляемой мощности двигателя из сети воспользуемся формулой:
S = P1/cosφ = 733,33/0,71 = 1032,85 (ВА)
Найдем номинальный ток двигателя при соединении обмоток в звезду:
Iном = S/(1,73·U) = 1032,85/(1,73·380) = 1,57 (А)
Найдем номинальный ток двигателя при соединении обмоток в треугольник:
Iном = S/(1,73·U) = 1032,85/(1,73·220) = 2,71 (А)
Как видите, получившиеся значения равны токам, указанным на бирке двигателя.
Для упрощения, выше приведенные формулы можно объединить в одну общую. В итоге получится:
Iном = P2/(1,73·U·cosφ·η)
Поэтому, чтобы определить номинальный ток двигателя, необходимо в данную формулу подставлять механическую мощность Р2, взятую с бирки, с учетом КПД и коэффициента мощности (cosφ), которые указаны на той же бирке или в паспорте на электродвигатель.
Перепроверим формулу.
Ток двигателя при соединении обмоток в звезду:
Iном = P2/(1,73·U·cosφ·η) = 550/(1,73·380·0,71·0,75) = 1,57 (А)
Ток двигателя при соединении обмоток в треугольник:
Iном = P2/(1,73·U·cosφ·η) = 550/(1,73·220·0,71·0,75) = 2,71 (А)
Надеюсь, что все понятно.
Примеры
Решил привести еще несколько примеров с разными типами двигателей и мощностями. Рассчитаем их номинальные токи и сравним с токами, указанными на их бирках.
1. Асинхронный двигатель 2АИ80А2ПА мощностью 1,5 (кВт)
Как видите, этот двигатель можно подключить только в трехфазную сеть напряжением 380 (В), т.к. его обмотки собраны в звезду внутри двигателя, а в клеммник выведено всего три конца, поэтому:
Iном = P2/(1,73·U·cosφ·η) = 1500/(1,73·380·0,85·0,82) = 3,27 (А)
Полученный ток 3,27 (А) соответствует номинальному току 3,26 (А), указанному на бирке.
2. Асинхронный двигатель АОЛ2-32-4 мощностью 3 (кВт)
Данный двигатель можно подключать в трехфазную сеть напряжением, как на 380 (В) звездой, так и на 220 (В) треугольником, т.к. в клеммник у него выведено 6 концов:
Iном = P2/(1,73·U·cosφ·η) = 3000/(1,73·380·0,83·0,83) = 6,62 (А) — звезда
Iном = P2/(1,73·U·cosφ·η) = 3000/(1,73·220·0,83·0,83) = 11,44 (А) — треугольник
Полученные значения токов при разных схемах соединения обмоток соответствуют номинальным токам, указанных на бирке.
3. Асинхронный двигатель АИРС100А4 мощностью 4,25 (кВт)
Аналогично, предыдущему.
Iном = P2/(1,73·U·cosφ·η) = 4250/(1,73·380·0,78·0,82) = 10,1 (А) — звезда
Iном = P2/(1,73·U·cosφ·η) = 4250/(1,73·220·0,78·0,82) = 17,45 (А) — треугольник
Расчетные значения токов при разных схемах соединения обмоток соответствуют номинальным токам, указанных на шильдике двигателя.
4. Высоковольтный двигатель А4-450Х-6У3 мощностью 630 (кВт)
Этот двигатель можно подключить только в трехфазную сеть напряжением 6 (кВ). Схема соединения его обмоток — звезда.
Iном = P2/(1,73·U·cosφ·η) = 630000/(1,73·6000·0,86·0,947) = 74,52 (А)
Расчетный ток 74,52 (А) соответствует номинальному току 74,5 (А), указанному на бирке.
Дополнение
Представленные выше формулы это конечно хорошо и по ним расчет получается более точным, но есть в простонародье более упрощенная и приблизительная формула для расчета номинального тока двигателя, которая наибольшее распространение получила среди домашних умельцев и мастеров.
Все просто. Берете мощность двигателя в киловаттах, указанную на бирке и умножаете ее на 2 — вот Вам и готовый результат. Только данное тождество уместно для двигателей 380 (В), собранных в звезду. Можете проверить и поумножать мощности приведенных выше двигателей. Но лично я же настаиваю Вам использовать более точные методы расчета.
P.S. А вот теперь, как мы уже определились с токами, можно приступать к выбору автоматического выключателя, предохранителей, тепловой защиты двигателя и контакторов для его управления. Об этом я расскажу Вам в следующих своих публикациях. Чтобы не пропустить выход новых статей — подписывайтесь на рассылку сайта «Заметки электрика». До новых встреч.
Если статья была Вам полезна, то поделитесь ей со своими друзьями:
| | Адрес этой страницы (вложенность) в справочнике dpva.ru: главная страница / / Техническая информация / / Оборудование / / Электродвигатели. Электромоторы. / / Таблица : номинальный ток электродвигателя = электромотора при полной нагрузке однофазных и 3-х фазных моторов в зависимости от напряжения 110VAC, 220VAC, 240VAC, 380VAC, 415VAC, 550VAC; Мощность 0,07-150кВт. Сила тока в зависимости от мощности Поделиться:
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Номинальные значения рабочей мощности и тока электродвигателей
Классы компонентов: 1.6.1.1.1. Модульные автоматические выключатели (ВАМ, МСВ), 1.6.5.1. Модульные контакторы, 1.6.1.2.1. Мотор-автоматы (автоматические выключатели защиты двигателей, MPCB), 1.6.1.3.1. Автоматические выключатели в литом корпусе (MCCB), 1.6.5.2. Контакторы, 1.6.5.3. Пускатели, 1.6.5.4. Реле перегрузки и аксессуары к ним, 1.12. Электродвигатели и приводная техника
Значения тока, приведенные ниже, относятся к стандартным трехфазным четырехполюсным асинхронным электродвигателям с КЗ ротором (1500 об/мин при 50 Гц, 1800 об/мин при 60 Гц). Данные значения представлены в качестве ориентира и могут варьироваться в зависимости от производителя электродвигателя и количества полюсов.
| Мощность электродвигателя | Номинальный ток электродвигателя: стандартные значения обозначены синим цветом (в соответствии с МЭК 60947-4-1, приложение G) |
|||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| 220В | 230В | 240В | 380В | 400В | 415В | 440В | 500В | 660В | 690В | |
| 0,06 кВт | 0,37 | 0,35 | 0,34 | 0,21 | 0,2 | 0,19 | 0,18 | 0,16 | 0,13 | 0,12 |
| 0,09 кВт | 0,54 | 0,52 | 0,5 | 0,32 | 0,3 | 0,29 | 0,26 | 0,24 | 0,18 | 0,17 |
| 0,12 кВт | 0,73 | 0,7 | 0,67 | 0,46 | 0,44 | 0,42 | 0,39 | 0,32 | 0,24 | 0,23 |
| 0,18 кВт | 1 | 1 | 1 | 0,63 | 0,6 | 0,58 | 0,53 | 0,48 | 0,37 | 0,35 |
| 0,25 кВт | 1,6 | 1,5 | 1,4 | 0,9 | 0,85 | 0,82 | 0,74 | 0,68 | 0,51 | 0,49 |
| 0,37 кВт | 2 | 1,9 | 1,8 | 1,2 | 1,1 | 1,1 | 1 | 0,88 | 0,67 | 0,64 |
| 0,55 кВт | 2,7 | 2,6 | 2,5 | 1,6 | 1,5 | 1,4 | 1,3 | 1,2 | 0,91 | 0,87 |
| 0,75 кВт | 3,5 | 3,3 | 3,2 | 2 | 1,9 | 1,8 | 1,7 | 1,5 | 1,15 | 1,1 |
| 1,1 кВт | 4,9 | 4,7 | 4,5 | 2,8 | 2,7 | 2,6 | 2,4 | 2,2 | 1,7 | 1,6 |
| 1,5 кВт | 6,6 | 6,3 | 6 | 3,8 | 3,6 | 3,5 | 3,2 | 2,9 | 2,2 | 2,1 |
| 2,2 кВт | 8,9 | 8,5 | 8,1 | 5,2 | 4,9 | 4,7 | 4,3 | 3,9 | 2,9 | 2,8 |
| 3 кВт | 11,8 | 11,3 | 10,8 | 6,8 | 6,5 | 6,3 | 5,7 | 5,2 | 4 | 3,8 |
| 4 кВт | 15,7 | 15 | 14,4 | 8,9 | 8,5 | 8,2 | 7,4 | 6,8 | 5,1 | 4,9 |
| 5,5 кВт | 20,9 | 20 | 19,2 | 12,1 | 11,5 | 11,1 | 10,1 | 9,2 | 7 | 6,7 |
| 7,5 кВт | 28,2 | 27 | 25,9 | 16,3 | 15,5 | 14,9 | 13,6 | 12,4 | 9,3 | 8,9 |
| 11 кВт | 39,7 | 38 | 36,4 | 23,2 | 22 | 21,2 | 19,3 | 17,6 | 13,4 | 12,8 |
| 15 кВт | 53,3 | 51 | 48,9 | 30,5 | 29 | 28 | 25,4 | 23 | 17,8 | 17 |
| 18,5 кВт | 63,8 | 61 | 58,5 | 36,8 | 35 | 33,7 | 30,7 | 28 | 22 | 21 |
| 22 кВт | 75,3 | 72 | 69 | 43,2 | 41 | 39,5 | 35,9 | 33 | 25,1 | 24 |
| 30 кВт | 100 | 96 | 92 | 57,9 | 55 | 53 | 48,2 | 44 | 33,5 | 32 |
| 37 кВт | 120 | 115 | 110 | 69 | 66 | 64 | 58 | 53 | 40,8 | 39 |
| 45 кВт | 146 | 140 | 134 | 84 | 80 | 77 | 70 | 64 | 49,1 | 47 |
| 55 кВт | 177 | 169 | 162 | 102 | 97 | 93 | 85 | 78 | 59,6 | 57 |
| 75 кВт | 240 | 230 | 220 | 139 | 132 | 127 | 116 | 106 | 81 | 77 |
| 90 кВт | 291 | 278 | 266 | 168 | 160 | 154 | 140 | 128 | 97 | 93 |
| 110 кВт | 355 | 340 | 326 | 205 | 195 | 188 | 171 | 156 | 118 | 113 |
| 132 кВт | 418 | 400 | 383 | 242 | 230 | 222 | 202 | 184 | 140 | 134 |
| 160 кВт | 509 | 487 | 467 | 295 | 280 | 270 | 245 | 224 | 169 | 162 |
| 200 кВт | 637 | 609 | 584 | 368 | 350 | 337 | 307 | 280 | 212 | 203 |
| 250 кВт | 782 | 748 | 717 | 453 | 430 | 414 | 377 | 344 | 261 | 250 |
| 315 кВт | 983 | 940 | 901 | 568 | 540 | 520 | 473 | 432 | 327 | 313 |
| 355 кВт | 1109 | 1061 | 1017 | 642 | 610 | 588 | 535 | 488 | 370 | 354 |
| 400 кВт | 1255 | 1200 | 1150 | 726 | 690 | 665 | 605 | 552 | 418 | 400 |
| 500 кВт | 1545 | 1478 | 1416 | 895 | 850 | 819 | 745 | 680 | 515 | 493 |
| 560 кВт | 1727 | 1652 | 1583 | 1000 | 950 | 916 | 832 | 760 | 576 | 551 |
| 630 кВт | 1928 | 1844 | 1767 | 1116 | 1060 | 1022 | 929 | 848 | 643 | 615 |
| 710 кВт | 2164 | 2070 | 1984 | 1253 | 1190 | 1147 | 1043 | 952 | 721 | 690 |
| 800 кВт | 2446 | 2340 | 2243 | 1417 | 1346 | 1297 | 1179 | 1076 | 815 | 780 |
| 900 кВт | 2760 | 2640 | 2530 | 1598 | 1518 | 1463 | 1330 | 1214 | 920 | 880 |
| 1000 кВт | 3042 | 2910 | 2789 | 1761 | 1673 | 1613 | 1466 | 1339 | 1014 | 970 |
Расчет номинального тока электродвигателя | Сайт электрика
Привет посетители сайта fazanet.ru, и в сегодняшней статье мы с вами разберём, как же сделать, этот непонятный расчёт тока электродвигателя. Каждый уважающий себя электромонтёр, робота которого связана с обслуживанием электрических, машин просто обязан это знать. Я в своё время тоже помню, что меня это очень сильно интересовало, когда меня перевили с одного цеха в другой. А конкретно именно работать электромонтёром.
Перед этим я уже немного затрагивал темы электродвигателей, когда писал о том как запустить асинхронные двигателей, и когда писал какие бывают номиналы электродвигателей.
Ну а теперь приступим конкретно к самому расчёту. Допустим: у вас есть трёхфазный асинхронный электродвигателей переменного тока, номинальная мощность, которого составляет 25 кВт, и вам хочется узнать какой же у него будет номинальный ток.
Для этого существует специальная формула: Iн = 1000Pн /√3•(ηн • Uн • cosφн),
Где Pн – это мощность электродвигателя; измеряется в кВт
Uн – это напряжение, при котором работает электродвигатель; В
ηн – это коэффициент полезного действия, обычно это значение 0.9
ну и cosφн – это коэффициент мощности двигателя, обычно 0.8.
Последние два значения обычно пишутся на заводской бирке, хотя они у всех двигателей практически одинаковые. Но все же нужно брать данные именно с заводской бирки на двигателе.
Вот как на этой картинке все значения видны, а ток нет. Только если КПД написан 81%, то для расчёта нужно брать 0.81.
Теперь подставим значения Iн = 1000•25/√3 • (0.9 • 380 • 0.8) = 52.81 А
Тем, кто не помнит, сколько будет √3, напоминаю – это будет 1,732
Вот и всё, все расчёты закончены. Всё очень легко и просто. По моему образцу вы можете легко рассчитать номинальный ток электродвигателя, вам всего лишь нужно подставить своих данных.
Как определить ток электродвигателя на практике.
Ещё в заключении, хотел поделиться с вами, тем как я определяю приблизительное значение тока без всяких расчётов. Если реально посмотреть, что у нас с вами получилось при расчёте, то реально вид, что номинальный ток приблизительно в два раза больше чем его мощность. Вот так я определяю ток на практике, мощность умножаю на два. Но это только приблизительное значение.
А ток холостого хода будет обычно в два раза меньше, чем его мощность. Но про то, как определить эти значения, мы поговорим с вами в следующих статьях. Так что подписывайтесь на обновления и не забываете поделиться этой статьёй со своими друзьями в социальных сетях.
На этом у меня всё. Пока.
С уважением Александр!
Читайте также статьи:
формула, правила расчета, виды и классификация электродвигателей
В электромеханике существует много приводов, которые работают с постоянными нагрузками без изменения скорости вращения. Их используют в промышленном и бытовом оборудовании как, например, вентиляторы, компрессоры и другие. Если номинальные характеристики неизвестны, то для расчетов используют формулу мощности электродвигателя. Вычисления параметров особенно актуальны для новых и малоизвестных приводов. Калькуляция выполняется с использованием специальных коэффициентов, а также на основе накопленного опыта работы с подобными механизмами. Данные необходимы для правильной эксплуатации электрических установок.

Что такое электродвигатель?
Электрический двигатель представляет собой устройство, которое преобразует электрическую энергию в механическую. Работа большинства агрегатов зависит от взаимодействия магнитного поля с обмоткой ротора, которая выражается в его вращении. Функционируют они от источников питания постоянного или переменного тока. В качестве питающего элемента может выступать аккумулятор, инвертор или розетка электросети. В некоторых случаях двигатель работает в обратном порядке, то есть преобразует механическую энергию в электрическую. Такие установки находят широкое применение на электростанциях, работающие от потока воздуха или воды.
Электродвигатели классифицируют по типу источника питания, внутренней конструкции, применению и мощности. Также приводы переменного тока могут иметь специальные щетки. Они функционируют от однофазного, двухфазного или трехфазного напряжения, имеют воздушное или жидкостное охлаждение. Формула мощности электродвигателя переменного тока
P = U х I,
где P — мощность, U — напряжение, I — сила тока.
Приводы общего назначения со своими размерами и характеристиками находят применение в промышленности. Самые большие двигатели мощностью более 100 Мегаватт используют на силовых установках кораблей, компрессорных и насосных станций. Меньшего размера используют в бытовых приборах, как пылесос или вентилятор.
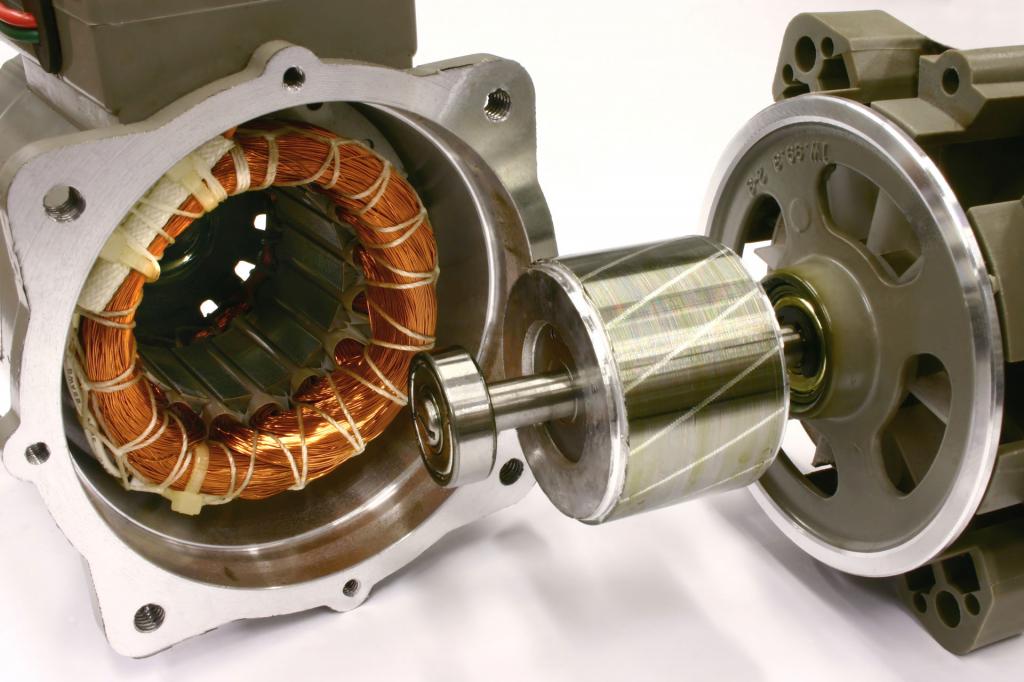
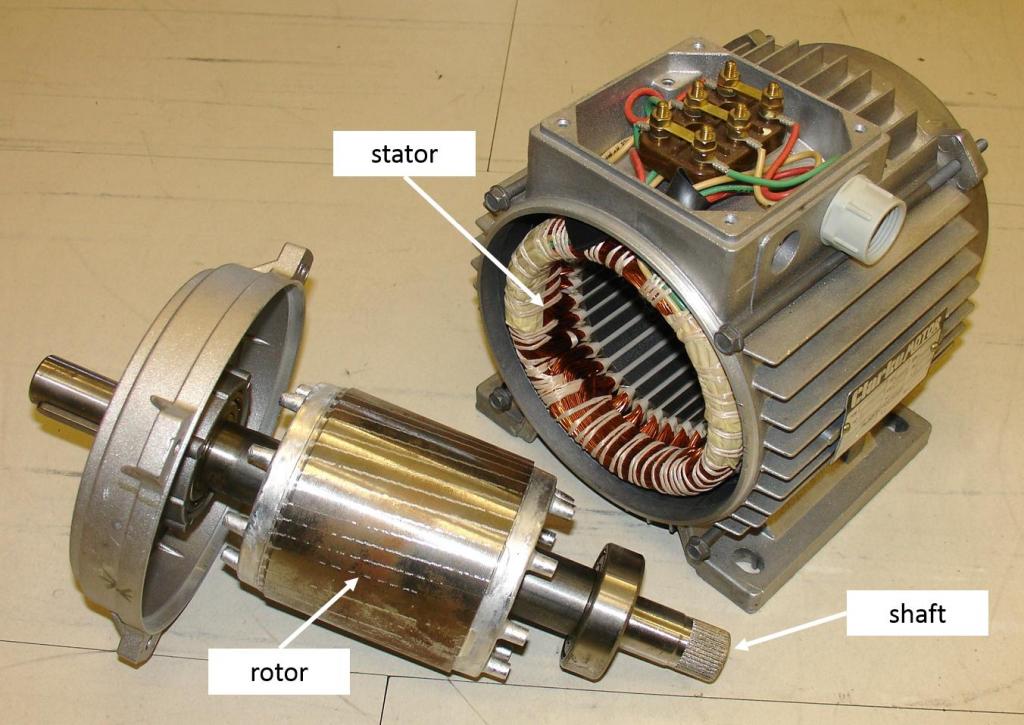
Конструкция электрического двигателя
Привод включает в себя:
- Ротор.
- Статор.
- Подшипники.
- Воздушный зазор.
- Обмотку.
- Коммутатор.
Ротор — единственная подвижная деталь привода, которая вращается вокруг своей оси. Ток, проходя через проводники, образует индукционное возмущение в обмотке. Формируемое магнитное поле взаимодействует с постоянными магнитами статора, что приводит в движение вал. Их рассчитывают по формуле мощности электродвигателя по току, для которой берется КПД и коэффициент мощности, в том числе все динамические характеристики вала.
Подшипники расположены на валу ротора и способствуют его вращению вокруг своей оси. Внешней частью они крепятся к корпусу двигателя. Вал проходит через них и выходит наружу. Поскольку нагрузка выходит за пределы рабочей зоны подшипников, ее называют нависающей.
Статор является неподвижным элементом электромагнитной цепи двигателя. Может включать в себя обмотку или постоянные магниты. Сердечник статора выполнен из тонких металлических пластин, которые называют пакетом якоря. Он призван снижать потери энергии, что часто происходит с твердыми стержнями.
Воздушный зазор — расстояние между ротором и статором. Эффективным является небольшой промежуток, так как он влияет на низкий коэффициент работы электродвигателя. Ток намагничивания растет с увеличением размера зазора. Поэтому его всегда стараются делать минимальным, но до разумных пределов. Слишком маленькое расстояние приводит к трению и ослаблению фиксирующих элементов.
Обмотка состоит из медной проволоки, собранной в одну катушку. Обычно укладывается вокруг мягкого намагниченного сердечника, состоящего из нескольких слоев металла. Возмущение индукционного поля происходит в момент прохождения тока через провода обмотки. В этот момент установка переходит в режим конфигурации с явными и неявными полюсами. В первом случае магнитное поле установки создает обмотка вокруг полюсного наконечника. Во втором случае, в распределенном поле рассредотачивается слотов полюсного наконечника ротора. Двигатель с экранированными полюсами имеет обмотку, которое сдерживает магнитное возмущение.
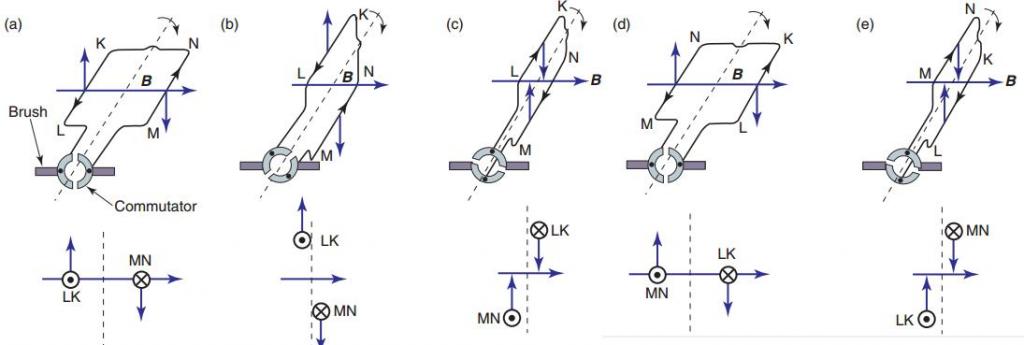
Коммутатор используют для переключения входного напряжения. Состоит из контактных колец, расположенных на валу и изолированных друг от друга. Ток якоря подается на щетки контактов ротационного коммутатора, который приводит к изменению полярности и заставляет вращаться ротор от полюса к полюсу. При отсутствии напряжения мотор прекращает крутиться. Современные установки оборудованы дополнительными электронным средствами, которые контролируют процесс вращения.

Принцип действия
По закону Архимеда ток в проводнике создает магнитное поле, в котором действует сила F1. Если из этого проводника изготовить металлическую рамку и поместить ее в поле под углом 90°, то края будут испытывать силы, направленные в противоположную сторону относительно друг друга. Они создают крутящий момент относительно оси, который начинает ее вращать. Витки якоря обеспечивают постоянное кручение. Поле создается электрическими или постоянными магнитами. Первый вариант выполнен в виде обмотки катушки на стальном сердечнике. Таким образом, ток рамки генерирует индукционное поле в обмотке электромагнита, которое порождает электродвижущую силу.
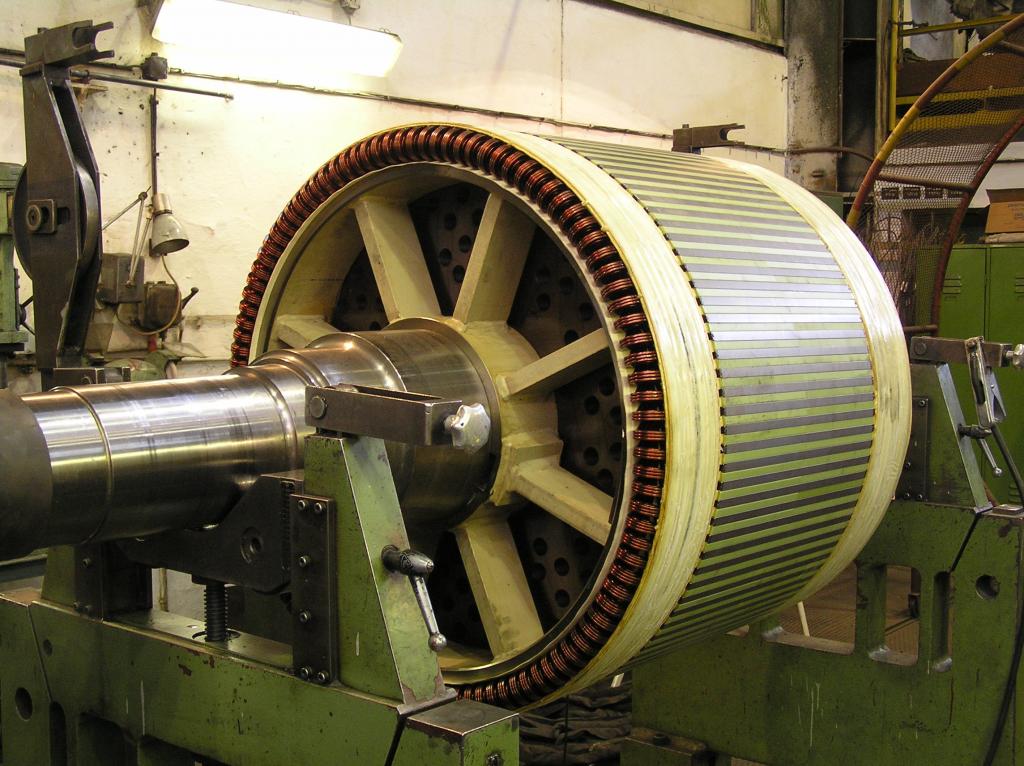
Рассмотрим более подробно работу асинхронных двигателей на примере установок с фазным ротором. Такие машины работают от переменного тока с частотой вращения якоря, не равной пульсации магнитного поля. Поэтому их еще называют индукционными. Ротор приводится в движение за счет взаимодействия электрического тока в катушках с магнитным полем.
Когда во вспомогательной обмотке отсутствует напряжение, устройство находится в состоянии покоя. Как только на контактах статора появляется электрический ток, образуется постоянное в пространстве магнитное поле с пульсацией +Ф и -Ф. Его можно представить в виде следующей формулы:
nпр = nобр = f1 × 60 ÷ p = n1
где:
nпр — количество оборотов, которое совершает магнитное поле в прямом направлении, об/мин;
nобр — число оборотов поля в обратном направлении, об/мин;
f1 — частота пульсации электрического тока, Гц;
p — количество полюсов;
n1 — общее число оборотов в минуту.
Испытывая пульсации магнитного поля, ротор получает начальное движение. По причине неоднородности воздействия потока, он будет развиваться крутящий момент. По закону индукции, в короткозамкнутой обмотке образуется электродвижущая сила, которая генерирует ток. Его частота пропорциональна скольжению ротора. Благодаря взаимодействию электрического тока с магнитным полем создается крутящий момент вала.
Для расчетов производительности существуют три формулы мощности асинхронного электродвигателя. По сдвигу фаз используют
S = P ÷ cos (alpha), где:
S — полная мощность, измеряемая в Вольт-Амперах.
P — активная мощность, указываемая в Ваттах.
alpha — сдвиг фаз.
Под полной мощностью понимаются реальный показатель, а под активной — расчетный.
Виды электродвигателей
По источнику питания приводы разделяют на работающие от:
- Постоянного тока.
- Переменного тока.
По принципу работы их, в свою очередь, делят на:
- Коллекторные.
- Вентильные.
- Асинхронные.
- Синхронные.
Вентильные двигатели не относят к отдельному классу, так как их устройство является вариацией коллекторного привода. В их конструкцию входит электронный преобразователь и датчик положения ротора. Обычно их интегрируют вместе с платой управления. За их счет происходит согласованная коммутация якоря.
Синхронные и асинхронные двигатели работают исключительно от переменного тока. Управление оборотами происходит с помощью сложной электроники. Асинхронные делятся на:
- Трехфазные.
- Двухфазные.
- Однофазные.
Теоретическая формула мощности трехфазного электродвигателя при соединении в звезду или треугольником
P = 3 * Uф * Iф * cos(alpha).
Однако для линейных значений напряжения и тока она выглядит как
P = 1,73 × Uф × Iф × cos(alpha).
Это будет реальный показатель, сколько мощности двигатель забирает из сети.
Синхронные подразделяются на:
- Шаговые.
- Гибридные.
- Индукторные.
- Гистерезисные.
- Реактивные.
В своей конструкции шаговые двигатели имеют постоянные магниты, поэтому их не относят к отдельной категории. Управление работой механизмов производится с помощью частотных преобразователей. Существуют также универсальные двигатели, которые функционируют от постоянного и переменного тока.
Общие характеристики двигателей
Все моторы имеют общие параметры, которые используются в формуле определения мощности электродвигателя. На их основе можно рассчитать свойства машины. В разной литературе они могут называться по-разному, но означают они одно и то же. В список таких параметров входит:
- Крутящий момент.
- Мощность двигателя.
- Коэффициент полезного действия.
- Номинальное количество оборотов.
- Момент инерции ротора.
- Расчетное напряжение.
- Электрическая константа времени.
Вышеуказанные параметры необходимы, прежде всего, для определения эффективности электрических установок, работающих за счет механической силы двигателей. Расчетные величины дают лишь приблизительное представление о реальных характеристиках изделия. Однако эти показатели часто используют в формуле мощность электродвигателя. Именно она определяет результативность машин.
Вращательный момент
Этот термин имеет несколько синонимов: момент силы, момент двигателя, Вращательный момент, вертящий момент. Все они используются для обозначения одного показателя, хотя с точки зрения физики эти понятия не всегда тождественны.
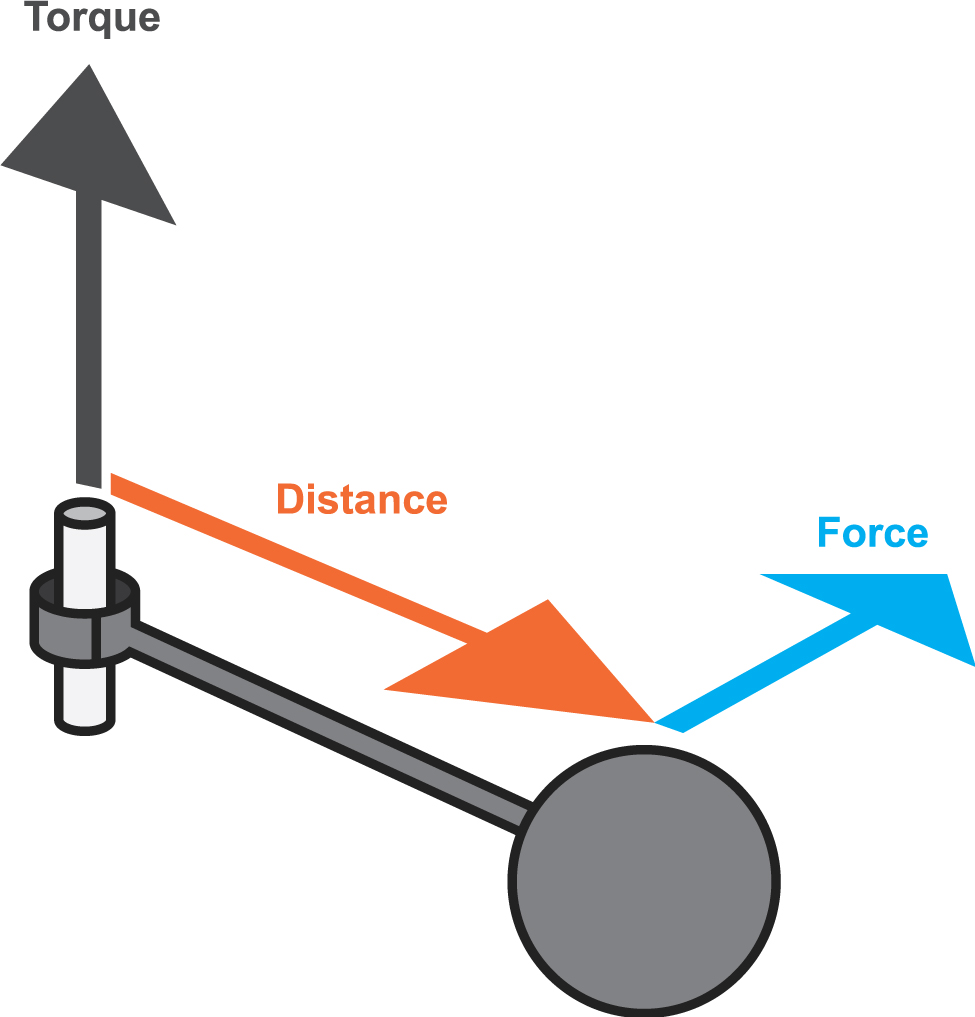
В целях унификации терминологии были разработаны стандарты, которые приводят все к единой системе. Поэтому в технической документации всегда используются словосочетание «крутящий момент». Он представляет собой векторную физическую величину, которая равна произведению векторных значений силы и радиуса. Вектор радиуса проводится от оси вращения к точке приложенной силы. С точки зрения физики разница между крутящим и вращательным моментом заключается в точке прикладывания силы. В первом случае это внутреннее усилие, во втором — внешнее. Измеряется величина в ньютон-метрах. Однако в формуле мощности электродвигателя крутящий момент используется как основное значение.
Рассчитывается он как
M = F × r, где:
M — крутящий момент, Нм;
F — прикладываемая сила, H;
r — радиус, м.
Для расчета номинального вращающего момента привода используют формулу
Мном = 30Рном ÷ pi × нном, где:
Рном — номинальная мощность электрического двигателя, Вт;
нном — номинальное число оборотов, мин-1.
Соответственно, формула номинальной мощности электродвигателя бедует выглядеть следующим образом:
Рном = Мном * pi*нном / 30.
Обычно все характеристики указаны в спецификации. Но бывает, что приходится работать с совершенно новыми установками, информацию о которых найти очень сложно. Для расчета технических параметров таких устройств берут данные их аналогов. Также всегда известны только номинальные характеристики, которые даются в спецификации. Реальные данные необходимо рассчитывать самостоятельно.
Мощность двигателя
В общем смысле данный параметр представляет собой скалярную физическую величину, которая выражена в скорости потребления или преобразования энергии системы. Он показывает, какую работу механизм выполнит за определенную единицу времени. В электротехнике характеристика отображает полезную механическую мощность на центральном вале. Для обозначения показателя используют литеру P или W. Основной единицей измерения является Ватт. Общая формула расчета мощности электродвигателя может быть представлена как:
P = dA ÷ dt, где:
A — механическая (полезная) работа (энергия), Дж;
t — затраченное время, сек.
Механическая работа также является скалярной физической величиной, выражаемой действием силы на объект, и зависящей от направления и перемещения этого объекта. Она представляет собой произведение вектора силы на путь:
dA = F × ds, где:
s — пройденное расстояние, м.
Она выражает дистанцию, которую преодолеет точка приложенной силы. Для вращательных движений она выражается как:
ds = r × d(teta), где:
teta — угол оборота, рад.
Таким образом можно вычислить угловую частоту вращения ротора:
omega = d(teta) ÷ dt.
Из нее следует формула мощности электродвигателя на валу: P = M × omega.
Коэффициент полезного действия электромотора
КПД — это характеристика, которая отражает эффективность работы системы при преобразовании энергии в механическую. Выражается отношением полезной энергии к потраченной. По единой системе единиц измерений он обозначается как «eta» и является безразмерным значением, исчисляемым в процентах. Формула КПД электродвигателя через мощность:
eta = P2 ÷ P1, где:
P1 — электрическая (подаваемая) мощность, Вт;
P2 — полезная (механическая) мощность, Вт;
Также он может быть выражен как:
eta = A ÷ Q × 100 %, где:
A — полезная работа, Дж;
Q — затраченная энергия, Дж.
Чаще коэффициент вычисляют по формуле потребляемой мощности электродвигателя, так как эти показатели всегда легче измерить.
Снижение эффективности работы электродвигателя происходит по причине:
- Электрических потерь. Это происходит в результате нагрева проводников от прохождения по ним тока.
- Магнитных потерь. Вследствие излишнего намагничивания сердечника появляется гистерезис и вихревые токи, что важно учитывать в формуле мощности электродвигателя.
- Механических потерь. Они связаны с трением и вентиляцией.
- Дополнительных потерь. Они появляются из-за гармоник магнитного поля, так как статор и ротор имеют зубчатую форму. Также в обмотке присутствуют высшие гармоники магнитодвижущей силы.
Следует отметить, что КПД является одним из самых важных компонентов формулы расчета мощности электродвигателя, так как позволяет получить цифры, наиболее приближенные к действительности. В среднем этот показатель варьирует от 10% до 99%. Она зависит от конструктивного устройства механизма.
Номинальное количество оборотов
Еще одним ключевым показателем электромеханических характеристик двигателя является частота вращения вала. Он выражается в числе оборотов в минуту. Часто его используют в формуле мощности электродвигателя насоса, чтобы узнать его производительность. Но необходимо помнить, что показатель всегда разный для холостого хода и работы под нагрузкой. Показатель представляет физическую величину, равной количеству полных оборотов за некий промежуток времени.
Расчетная формула частоты оборотов:
n = 30 × omega ÷ pi, где:
n — частота вращения двигателя, об/мин.
Для того, чтобы найти мощность электродвигателя по формуле оборотистости вала, необходимо привести ее к расчету угловой скорости. Поэтому P = M × omega будет выглядеть следующим образом:
P = M × (2pi × n ÷ 60) = M × (n ÷ 9,55), где
t = 60 секунд.
Момент инерции
Этот показатель представляет собой скалярную физическую величину, которая отражает меру инертности вращательного движения вокруг собственной оси. При этом масса тела является величиной его инертности при поступательном движении. Основная характеристика параметра выражена распределением масс тела, которая равна сумме произведений квадрата расстояния от оси до базовой точки на массы объекта.В Международной системе единиц измерения он обозначается как кг·м2 и имеет рассчитывается по формуле:
J = ∑ r2 × dm, где
J — момент инерции, кг·м2 ;
m — масса объекта, кг.
Моменты инерции и силы связаны между собой соотношением:
M — J × epsilon, где
epsilon — угловое ускорение, с-2.
Показатель рассчитывается как:
epsilon = d(omega) × dt.
Таким образом, зная массу и радиус ротора, можно рассчитать параметры производительности механизмов. Формула мощности электродвигателя включает в себя все эти характеристики.
Расчетное напряжение
Его еще называют номинальным. Оно представляет собой базовое напряжение, представленное стандартным набором вольтажа, которые определяется степенью изоляции электрического оборудования и сети. В действительности оно может отличаться в разных точках оборудования, но не должно превышать предельно допустимых норм рабочих режим, рассчитанных на продолжительное функционирование механизмов.
Для обычных установок под номинальным напряжением понимают расчетные величины, для которых они предусмотрены разработчиком в нормальном режиме работы. Перечень стандартного вольтажа сети предусмотрен в ГОСТ. Эти параметры всегда описаны в технических характеристиках механизмов. Для расчета производительности используют формулу мощности электродвигателя по току:
P = U × I.
Электрическая константа времени
Представляет собой время, необходимое для достижения уровня тока до 63 % после подачи напряжения на обмотки привода. Параметр обусловлен переходными процессами электромеханических характеристик, так как они быстротечны ввиду большого активного сопротивления. Общая формула расчета постоянной времени:
te = L ÷ R.
Однако электромеханическая константа времени tm всегда больше электромагнитной te. Первый параметр получается из уравнения динамических характеристики двигателя при сохранении условии, когда ротор разгоняется с нулевой скоростью до максимальных оборотов холостого хода. В этом случае уравнение принимает вид
M = Mст + J × (d(omega) ÷ dt), где
Mст = 0.
Отсюда получаем формулу:
M = J × (d(omega) ÷ dt).
По факту электромеханическую константу времени рассчитывают по пусковому момент — Mп. Механизм, работающий в идеальных условиях, с прямолинейными характеристиками будем иметь формулу:
M = Mп × (1 — omega ÷ omega0), где
omega0 — скорость на холостом ходу.
Такие расчеты используют в формуле мощности электродвигателя насоса, когда ход поршня напрямую зависит от оборотистости вала.
Основные формулы расчета мощности двигателей
Для вычисления реальных характеристик механизмов всегда нужно учитывать много параметров. в первую очередь нужно знать, какой ток подается на обмотки электродвигателя: постоянный или переменный. Принцип их работы отличается, следовательно, отличаются метод вычислений. Если упрощенный вид расчета мощности привода выглядит как:
Pэл = U × I, где
I — сила тока, А;
U — напряжение, В;
Pэл — подведенная электрическая мощность. Вт.
В формуле мощности электродвигателя переменного тока необходимо также учитывать сдвиг фаз (alpha). Соответственно, расчеты для асинхронного привода выглядят как:
Pэл = U × I × cos(alpha).
Кроме активной (подведенной) мощности существует также:
- S — реактивная, ВА. S = P ÷ cos(alpha).
- Q — полная, ВА. Q = I × U × sin(alpha).
В расчетах также необходимо учитывать тепловые и индукционные потери, а также трение. Поэтому упрощенная модель формулы для электродвигателя постоянного тока выглядит как:
Pэл = Pмех + Ртеп +Ринд + Ртр, где
Рмех — полезная вырабатываемая мощность, Вт;
Ртеп — потери на образование тепла, ВТ;
Ринд — затраты на заряд в индукционной катушке, Вт;
Рт — потери в результате трения, Вт.
Заключение
Электродвигатели находят применение практически во всех областях жизни человека: в быту, в производстве. Для правильного использования привода необходимо знать не только его номинальные характеристики, но и реальные. Это позволит повысить его эффективность и снизить затраты.
Как определить мощность и потребляемый ток электродвигателя
Все электрические двигатели выпускаются с табличками на корпусе, из которых можно узнать основные характеристики электродвигателя: его марку, потребляемый номинальный рабочий ток и мощность, частоту вращения, тип двигателя, КПД и cos(fi). Так же эти данные указаны в паспорте к устройству.
Из всех параметров наиболее важное значение для подключения имеют: мощность электродвигателя и потребляемый ток, не стоит его путать с пусковым. Именно эти данные позволяют нам определить достаточность мощности для привода, необходимое сечение кабеля для подключения мотора и подобрать подходящие по номиналу для защиты автомат и тепловое реле.
Но бывает, что нет паспорта или таблички и для определения этих величин необходимо будет сделать измерения. Как узнать мощность, рабочий ток и снизить пусковой, Вы узнаете далее из этой статьи.
Как определить мощность электродвигателя
Проще всего посмотреть на табличку и найти величину в киловаттах. Например, на картинке она равна 45 кВт.Учтите, что эта величина на табличке указывает на потребляемую активную мощность из электросети. Полная же мощность будет равна сумме активной и реактивной мощности. Электрические счетчики в доме или гараже считают только расход активной электроэнергии, а учет реактивной энергии ведется только на предприятиях при помощи специальных счетчиков. Чем выше у электродвигателя cos(fi), тем меньше будет составляющая реактивной энергии в полной мощности. Не стоит путать cos(fi) с КПД. Этот показатель показывает сколько электроэнергии переводится в полезную механическую работу, а сколько в бесполезное тепло. Например, КПД равный 90 процентам, говорит о том, что десятая часть потребленной электроэнергии уходит на тепловые потери и трение в подшипниках.
Вы должны иметь ввиду, что в паспорте или на табличке указывается номинальная мощность, которая будет равна этому значению только при условии достижения оптимальной нагрузки на вал. При чем перегружать не стоит вал по целому ряду причин, лучше выбрать по мощнее мотор. На холостом ходу величина тока будет гораздо ниже номинала.
Как же определить номинальную мощность электродвигателя? В интернете Вы найдете много различных формул и расчетов. Для некоторых необходимо помереть размеры статора, для других формул понадобится знать величину тока, КПД и cos(fi). Мой совет не заморачивайтесь со всем этим. Лучше этих расчетов все равно будут практические измерения. И для их проведения ничего не понадобится вообще.
Как определить мощность любого электроприбора в доме или гараже? Конечно с помощью счетчика электроэнергии. Перед началом измерения отключите все электроприборы из розеток, освещение и все то, что подключено от электрощита.
Далее если у Вас электронный счетчик типа Меркурий, все очень просто надо включить мотор под нагрузкой и погонять минут 5. На электронном табло должна высветится величина нагрузки в кВт, подключенная к счетчику в данный момент.
Если же у вас дисковый индукционный счетчик учитывайте, что он учет ведет в киловатт/часах. Запишите перед началом измерений последние показатели, включайте двигатель строго секунда в секунду ровно на 10 минут, затем после остановки отнимите новые показания от предыдущих и умножайте кВт\ч на 6. Полученный результат и будет активной мощностью данного двигателя в Киловаттах, для перевода в Ватты разделите на 1000. Рекомендую прочитать статью: как снимать показания электросчетчика.
Если двигатель маломощный, тогда для более высокой точности можно посчитать обороты диска. Например, за одну минуту он сделал 10 полных оборотов, а на счетчике написано 1200 оборотов= 1 кВт/ч. 10 умножаем на количество минут в часе и получаем 600 оборотов за час. 1200 делим на 600 и получаем 500 Ватт или 0.5 кВт. Чем дольше по времени будете измерять, тем точнее будут данные. Но время всегда должно быть кратно полной минуте. Затем делим 60 на количество минут измерения и умножаем на сосчитанные обороты. После этого величину оборотов, равных одному Киловатт/часу для вашей модели электросчетчика делим на полученный результат и получаем необходимую величину мощности.
Как определить потребляемый ток электродвигателя
Зная мощность, легко можно высчитать величину потребляемого тока. Для 3 фазных двигателей, подключенных по схеме звезда на 380 Вольт, необходимо умножить мощность в киловаттах на 2. Например, при мощности 5 киловатт ток будет равен 10 Ампер. Опять же учитывайте, что такой ток мотор будет брать только под нагрузкой максимально близкой к номиналу. Полунагруженный электродвигатель и тем более на холостом ходу будет потреблять значительно меньший ток.
Для определения тока в однофазных сетях, необходимо мощность разделить на напряжение. Например, при работе двигателя напряжение в месте его подключения равно 230 Вольт. Это важно так, как после включения нагрузки напряжение скорее всего понизится в месте подключения электродвигателя.
Если например, мощность мотора на 220 Вольт по измерениям оказалась равной 1.5 кВт или 1500 Ватт. Делим 1500 на 230 Вольт и получаем, что рабочий ток двигателя приблизительно равен 6.5 Ампер.
Пусковой ток электродвигателя
При запуске любого типа электродвигателя возникает пусковой ток от 2 до 8 кратного значению номинального тока в рабочем режиме электродвигателя. Величина пускового тока зависит от типа двигателя, скорости вращения, схемы подключения, наличие нагрузки на валу и от других параметров.
Пусковой ток возникает, потому что в момент запуска наводится очень сильное магнитное поле в обмотках необходимое, что бы сдвинуть с места и раскрутить ротор. При включении мотора сопротивление обмоток мало, а следовательно по закону Ома, ток вырастает при неизменном напряжении в участке цепи. По мере того как двигатель раскручивается, возникает в обмотках ЭДС или индуктивное сопротивление и ток начинает уменьшаться до номинального значения.
Эти всплески реактивной энергии негативно сказываются на работе других электропотребителей, подключенных к этой же линии электропитания, что служит причиной возникновения особенно губительных для электроники скачков или перепадов напряжения.
Снизить вдвое пусковой ток можно при использовании специально разработанного для этих целей тиристорного блока, а лучше при помощи устройства плавного запуска (УПЗ). УПЗ с меньшим пусковым током и быстрее в полтора раза запускает мотор по сравнению с тиристорным запуском. Устройства плавного запуска подходят как к синхронным, так и к асинхронным двигателям. УПЗ выпускаются предприятиями Украины и России.
Для запуска трехфазного асинхронного двигателя сегодня нередко используются и преобразователя частоты. Широкое их распространение пока сдерживает только цена. Благодаря изменению величин частоты тока и напряжения удается не только сделать плавный запуск, но и регулировать скорость вращения ротора. По другому как только изменением частоты электрического тока, регулировать скорость вращения асинхронного двигателя нет возможности. Но следует знать, что частотный преобразователь создает помехи в электросети, поэтому для подключения электроники и бытовой техники используйте сетевой фильтр.
Использование устройства плавного запуска и частотного преобразователя позволяет не только сохранить стабильность электропитания у Вас и Ваших соседей, подключенных к одной линии электроснабжения, но и продлить срок службы электродвигателей.
Расчет мощности электродвигателя — ElectrikTop.ru

Если вы задались целью создать электрический привод, например, собственную мельницу, насосную станцию, транспортерную ленту или другое полезное в хозяйстве устройство, вам надо найти или купить электродвигатель и убедиться в том, что его мощность соответствует поставленным задачам.
Сегодня мы осветим некоторые аспекты, касающиеся устройства и рабочих качеств электрических машин, что поможет вам сделать правильный выбор.
Как выбрать электродвигатель
Подбор электродвигателя стоит начать со знакомства с типами электрических машин. Основное их отличие состоит в способе взаимодействия магнитных полей статора и ротора. По этому признаку они делятся на два типа:
- Синхронные.
- Асинхронные.
Синхронные электрические машины
У них магнитное поле статора и ротора создается внешними источниками, они независимы друг от друга, их смена положения их полюсов происходит синхронно.
Двигатели постоянного тока
Исходя из принципа механики Ньютона, утверждающего, что всякое движение относительно, электродвигатель постоянного тока можно назвать синхронной машиной. Хотя магнитные поля статора и ротора в ней неподвижные, а вращение вала происходит за счет эффекта отталкивания одноименных полюсов магнитов и притягивания разноименных.
 Синхронизация их положения относительно друг друга происходит особого устройства – коллектора, расположенного на валу ротора. Это кольцо из меди, поделенное на секторы диэлектриком. Концы обмоток ротора подключаются к этим секторам и создают контактные пары.
Синхронизация их положения относительно друг друга происходит особого устройства – коллектора, расположенного на валу ротора. Это кольцо из меди, поделенное на секторы диэлектриком. Концы обмоток ротора подключаются к этим секторам и создают контактные пары.
На них через угольные щетки подается постоянный ток. Во время вращения вала происходит переключение полюсов между парами. Магнитное поле статора может создаваться металлами с остаточным магнетизмом или прохождением тока по обмоткам. Последние применяются в электрических машинах большой мощности.
Их достоинством является большой коэффициент полезного действия, до 98%, а также стабильно высокий вращающий момент и малая зависимость от перегрузок. Двигатели постоянного тока отлично подходят для привода подъемных механизмов, а также в качестве тяговых на электротранспорте.
Ими очень просто управлять: для снижения скорости вращения надо лишь уменьшить величину подаваемого напряжения, а для реверсирования достаточно сменить полярность. Недостатком является сложность устройства и невысокая надежность щеточного узла, его склонность к искрению и шумность. Кроме того, постоянное напряжение сложно передавать на большие расстояния, из-за чего нет магистральных линий такого типа. Питание придется создавать самостоятельно, используя выпрямительные или инверторные схемы. Также про двигатели постоянного тока можно почитать здесь.
Коллекторные двигатели
По своей конструкции они аналогичны двигателям постоянного тока. Однако питаются переменным однофазным током. Статорная обмотка возбуждения у них включена последовательно с обмоткой якоря. Вращение вала происходит за счет синхронной смены полюсов магнитного поля в статорной и роторной обмотках.
К перечисленным выше достоинствам – большому вращающему моменту, нечувствительности к перегрузкам, стоит отнести и то, что это единственная электрическая машина переменного тока, которой можно без проблем управлять.
Для изменения скорости вращения вала достаточно уменьшить питающее напряжение, а для реверсирования поменять местами точки подключения коллекторного узла со статорной обмоткой. Поэтому коллекторные электродвигатели широко применяются в бытовых электроприборах.
Например, в стиральных машинах, дрелях и другом электрифицированном инструменте. К недостаткам, основным из которых является сложность и малая надежность щеточного узла, стоит отнести и невозможность подключения трехфазного напряжения. Просто потому, что в этом случае щеток должно быть шесть. Это ограничивает максимальную мощность двигателей: у однофазных машин при напряжении 220 вольт это значение не бывает более 2,5 киловатта.
Синхронные электродвигатели переменного тока
 У них статорная обмотка питается переменным трехфазным током, а роторная – постоянным. Чтобы их магнитные полюса сцепились и вызвали движение вала, такой электродвигатель надо раскрутить вручную или другим мотором. Фактически они являются генератором переменного тока, работающим в режиме вращения. Достоинством машины являются высокий крутящий момент и стабильность частоты вращения.
У них статорная обмотка питается переменным трехфазным током, а роторная – постоянным. Чтобы их магнитные полюса сцепились и вызвали движение вала, такой электродвигатель надо раскрутить вручную или другим мотором. Фактически они являются генератором переменного тока, работающим в режиме вращения. Достоинством машины являются высокий крутящий момент и стабильность частоты вращения.
Недостатками – сложность пуска и наличие коллектора со щеточным узлом, что снижает их надежность. А также невозможность регулирования частоты вращения. Применяются в установках, которые работают постоянно или с очень длительным рабочим циклом. Например, на перекачивающих станциях или транспортерных лентах.
Узнать больше об электродвигателях можно узнать в нашей статье «Электрический двигатель: виды и характеристики».
Асинхронные электрические машины
В них магнитное поле ротора является порождением вращающегося магнитного поля статора. Поскольку между этими деталями машины есть воздушный зазор, передача энергии между ними происходит с потерями. Поэтому фаза тока в роторе отстает от фазы тока в статоре на небольшой угол (не более 100), который определяет величину коэффициента мощности cosφ. Это отставание и является причиной того, что электрическую машину этого типа называют асинхронной.
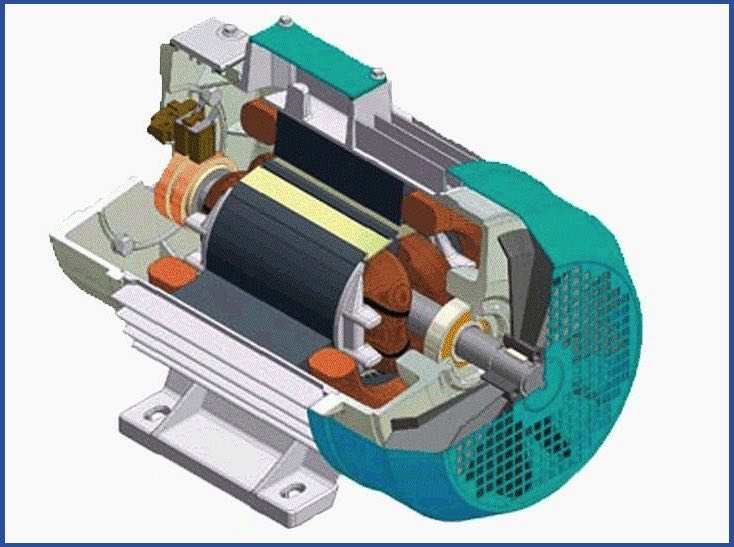
Двигатели с короткозамкнутым ротором
Обмотка ротора у них – это набор металлических стержней, которые соединяют два кольца. Получившуюся фигуру называют «беличье колесо». В момент подачи напряжения на статорную обмотку в роторе возникает ток короткого замыкания, энергия которого тратится на раскручивании вала и тем самым гасится. У него несколько меньший КПД, чем у синхронных машин, он не превышает 80%.
 После набора оборотов он имеет очень стабильный вращающий момент на валу и хорошо выдерживает перегрузки. Главными достоинствами таких двигателей является его простота и надежность, благодаря которым они очень широко распространены. Недостатками – сложность управления.
После набора оборотов он имеет очень стабильный вращающий момент на валу и хорошо выдерживает перегрузки. Главными достоинствами таких двигателей является его простота и надежность, благодаря которым они очень широко распространены. Недостатками – сложность управления.
Для изменения скорости вращения необходимо менять частоту питающего напряжения или количество статорных обмоток, которое определяет количество полюсов электромагнита – чем их больше, тем она ниже. Также электродвигателям с короткозамкнутым ротором свойственен большой пусковой ток, перегружающий сеть, а также резкий рост вращающего момента при подключении питания, что может вызвать поломку редуктора привода.
Двигатели с фазным ротором
Пуск асинхронных двигателей с короткозамкнутым ротором большой мощности (более 30 кВт) связан с чрезвычайной перегрузкой питающей сети. Для устранения этого явления используют машины с фазным ротором, обмотка которых состоит из трех катушек, соединенных звездой. Их концы соединены угольными щетками с тремя контактными кольцами, расположенными на оси двигателя.
 В отличие от коллектора двигателя постоянного тока они не поделены на сектора. При запуске такой машины используется трехфазный реостат, сопротивление которого в момент пуска максимальное. Постепенно уменьшая активное сопротивление ротора, добиваются плавной раскрутки вала электродвигателя. При достижении номинальных оборотов его закорачивают.
В отличие от коллектора двигателя постоянного тока они не поделены на сектора. При запуске такой машины используется трехфазный реостат, сопротивление которого в момент пуска максимальное. Постепенно уменьшая активное сопротивление ротора, добиваются плавной раскрутки вала электродвигателя. При достижении номинальных оборотов его закорачивают.
Изменяя сопротивление ротора, можно добиться изменения частоты вращения. Достоинством машины такого типа является отсутствие перегрузки в момент запуска и плавное нарастание вращающего момента. Поэтому ее применяют в грузоподъемном оборудовании. Недостаток – сложность устройства и более низкий, чем у машин с короткозамкнутым ротором КПД, он не более 60%.
Читайте также «Как работает асинхронный электродвигатель».
Как рассчитать мощность электродвигателя
При расчете мощности электродвигателя надо ориентироваться на потребности обеспечиваемого технологического процесса. В Сети так много методичек для определения этого параметра, что вы можете запутаться окончательно. Предлагаем вам довольно простую универсальную формулу, пригодную для любых случаев.
P = T ∙ Ω
P – мощность электродвигателя. Т – потребный вращающий момент на валу, а Ω – угловая скорость.
T = Ft ∙ R
Ft– потребное тяговое усилие, оно рассчитывается по формуле: Ft= t ∙ M ∙ 2.5, где t – коэффициент трения (для подшипников качения он равен 0.02), М – масса перемещаемого груза, а 2.5 – это коэффициент Ньютона. R – радиус рабочего органа, например, крыльчатки насоса.
Ω = π ∙ n / 30, где π = 3.14, а n – паспортная частота вращения приводимого в действие устройства.
Полученное значение лучше увеличить в 1,5 раза, чтобы предусмотреть возможные перегрузки во время работы привода.
При расчете рабочего тока электродвигателя необходимо учитывать, что при соединении обмоток статора асинхронного электродвигателя звездой он в 1,73 раза меньше, чем при соединении треугольником. На эту же величину уменьшается и мощность.
Окончательно убедиться в работоспособности созданного привода вы сможете только на практике. Но если вы будете следовать изложенным выше рекомендациям, то вероятность того, что все будет работать как надо без дополнительных переделок, значительно повысится.