Драйверы двигателя L298N, L293D и Arduino Motor Shield
Драйвер двигателя выполняет крайне важную роль в проектах ардуино, использующих двигатели постоянного тока или шаговые двигатели. C помощью микросхемы драйвера или готового шилда motor shield можно создавать мобильных роботов, автономные автомобили на ардуино и другие устройства с механическими модулями. В этой статье мы рассмотрим подключение к ардуино популярных драйверов двигателей на базе микросхем L298N и L293D.
Драйвер двигателя в проектах ардуино
Для чего нужен драйвер двигателя?
Как известно, плата ардуино имеет существенные ограничения по силе тока присоединенной к ней нагрузки. Для платы это 800 mA, а для каждого отдельного вывода – и того меньше, 40mA. Мы не можем подключить напрямую к Arduino Uno, Mega или Nano даже самый маленький двигатель постоянного тока. Любой из этих двигателей в момент запуска или остановки создаст пиковые броски тока, превышающие этот предел.
Как же тогда подключить двигатель к ардуино? Есть несколько вариантов действий:
Использовать реле
Использовать силовой транзистор. В данном случае мы можем управлять током, проходящим через двигатель, а значит, можем управлять скоростью вращения шпинделя. Но для смены направления вращения этот способ не подойдет.
Использовать специальную схему подключения, называемую
В этой статье мы рассмотрим последний, третий вариант, как наиболее гибкий и удобный для создания первых роботов на ардуино.
Микросхема или плата расширения Motor Shield
Motor Shield – плата расширения для Ардуино, которая обеспечивает работу двигателей постоянного тока и шаговых двигателей. Самыми популярными платами Motor Shield являются схемы на базе чипов L298N и L293D, которые могут управлять несколькими двигателями. На плате установлен комплект сквозных колодок Ардуино Rev3, позволяющие устанавливать другие платы расширения. Также на плате имеется возможность выбора источника напряжения – Motor Shield может питаться как от Ардуино, так и от внешнего источника. На плате имеется светодиод, который показывает, работает ли устройство. Все это делает использование драйвера очень простым и надежным – не нужно самим изобретать велосипеды и решать уже кем-то решенные проблемы. В этой статье мы будем говорить именно о шилдах.
Принцип действия H-моста
 Принцип работы драйвера двигателя основан на принципе работы H-моста. H-мост является электронной схемой, которая состоит из четырех ключей с нагрузкой. Название моста появилось из напоминающей букву H конфигурации схемы.
Принцип работы драйвера двигателя основан на принципе работы H-моста. H-мост является электронной схемой, которая состоит из четырех ключей с нагрузкой. Название моста появилось из напоминающей букву H конфигурации схемы.
Схема моста изображена на рисунке. Q1…Q4 0 полевые, биполярные или IGBT транзисторы. Последние используются в высоковольтных сетях. Биполярные транзисторы практически не используются, они могут присутствовать в маломощных схемах. Для больших токов берут полевые транзисторы с изолированным затвором. Ключи не должны быть замкнуты вместе одновременно, чтобы не произошло короткого замыкания источника. Диоды D1…D4 ограничительные, обычно используются диоды Шоттки.
С помощью изменения состояния ключей на H-мосте можно регулировать направление движения и тормозить моторы. В таблице приведены основные состояния и соответствующие им комбинации на пинах.
| Q1 | Q2 | Q3 | Q4 | Состояние |
| 1 | 0 | 0 | 1 | Поворот мотора вправо |
| 0 | 1 | 1 | 0 | Поворот мотора влево |
| 0 | 0 | 0 | 0 | Свободное вращение |
| 0 | 1 | 0 | 1 | Торможение |
| 1 | 0 | 1 | 0 | Торможение |
| 1 | 1 | 0 | 0 | Короткое замыкание |
| 0 | 0 | 1 | 1 |
Драйвер двигателя L298N
Модуль используется для управления шаговыми двигателями с напряжением от 5 до 35 В. При помощи одной платы L298N можно управлять сразу двумя двигателями. Наибольшая нагрузка, которую обеспечивает микросхема, достигает 2 А на каждый двигатель. Если подключить двигатели параллельно, это значение можно увеличить до 4 А.
Плата выглядит следующим образом:

Распиновка микросхемы L298N:
- Vcc – используется для подключения внешнего питания;
- 5В;
- Земля GND;
- IN1, IN2, IN3, IN4 – используется для плавного управления скоростью вращения мотора;
- OUT1, OUT2 – используется для выхода с первого двигателя;
- OUT3, OUT4 – используется для выхода со второго двигателя;
- S1 – переключает питание схемы: от внешнего источника или от внутреннего преобразователя;
- ENABLE A, B – требуются для раздельного управления каналами. Используются в двух режимах – активный, при котором каналами управляет микроконтроллер и имеется возможность изменения скорости вращения, и пассивный, в котором невозможно управлять скоростью двигателей (установлено максимальное значение).

При подключении двух двигателей, нужно проверить, чтобы у них была одинаковая полярность. Если полярность разная, то при задании направления движения они будут вращаться в противоположные стороны.
Драйвер двигателя L293D
L293D – является самой простой микросхемой для работы с двигателями. L293D обладает двумя H-моста, которые позволяют управлять двумя двигателями. Рабочее напряжение микросхемы – 36 В, рабочий ток достигает 600 мА. На двигатель L293D может подавать максимальный ток в 1,2 А.
В схеме имеется 16 выходов. Распиновка:
- +V – питание на 5 В;
- +Vmotor – напряжение питания для мотором до 36 В;
- 0V – земля;
- En1, En2 –включают и выключают H-мосты;
- In1, In2 – управляют первым H-мостом;
- Out1, Out2 – подключение первого H-моста;
- In3, In4 – управляют вторым H-мостом;
- Out3, Out4 – подключение второго H-моста.

Для подключения к микроконтроллеру Arduino Uno нужно соединить выходы In1 на L293D и 7 пин на Ардуино, In2 – 8, In3 – 2, In4 – 3, En1 – 6, En2 – 5, V – 5V, Vmotor – 5 V, 0V – GND. Пример подключения одного двигателя к Ардуино показан на рисунке.

Драйвер двигателя на микросхеме HG7881
HG7881 – двухканальный драйвер, к которому можно подключить 2 двигателя или четырехпроводной двухфазный шаговый двигатель. Устройство часто используется из-за своей невысокой стоимости. Драйвер используется только для изменения направления вращения, менять скорость он не может.

Плата содержит 2 схемы L9110S, работающие как H-мост.
Характеристики драйвера HG7881:
- 4-контактное подключение;
- Питание для двигателей от 2,5 В до 12 В;
- Потребляемый ток менее 800 мА;
Распиновка:
- GND – земля;
- Vcc – напряжение питания 2,5В – 12В;
- A-IA – вход A(IA) для двигателя A;
- A-IB – вход B (IB) для двигателя A;
- B-IA – вход A(IA) для двигателя B;
- B-IB – вход B (IB) для двигателя B.
В зависимости от поданного сигнала на выходах IA и IB будет разное состояние для двигателей. Возможные варианты для одного из моторов приведены в таблице.
| IA | IB | Состояние мотора |
| 0 | 0 | Остановка |
| 1 | 0 | Двигается вперед |
| 0 | 1 | Двигается назад |
| 1 | 1 | Отключение |
Подключение одного двигателя к Ардуино изображено на рисунке.

Сравнение модулей
Модуль L293D подает максимальный ток в 1,2А, в то время как на L298N можно добиться максимального тока в 4 А. Также L293D обладает меньшим КПД и быстро греется во время работы. При этом L293D является самой распространенной платой и стоит недорого. Плата HG7881 отличается от L293D и L298N тем, что с ее помощью можно управлять только направлением вращения, скорость менять она не может. HG7881 – самый дешевый и самый малогабаритный модуль.
Подключение L298N к Arduino
Как уже упоминалось, в первую очередь нужно проверить полярность подключенных двигателей. Двигатели, вращающиеся в различных направлениях, неудобно программировать.
Нужно присоединить источник питания. + подключается к пину 4 на плате L298N, минус (GND) – к 5 пину. Затем нужно соединить выходы с L298N и пины на Ардуино, причем некоторые из них должны поддерживать ШИМ-модуляцию. На плате Ардуино они обозначены ~. Выходы с L298N IN1, IN2, IN3 и IN4 подключить к D7, D6, D5 и D4 на Ардуино соответственно. Подключение всех остальных контактов представлено на схеме.

Направление вращения задается с помощью сигналов HIGH и LOW на каждый канал. Двигатели начнут вращаться, только когда на 7 пине для первого мотора и на 12 пине для второго на L298N будет сигнал HIGH. Подача LOW останавливает вращение. Чтобы управлять скоростью, используются ШИМ-сигналы.
Для управления шаговым двигателем в Arduino IDE существует стандартная библиотека Stepper library. Чтобы проверить работоспособность собранной схемы, можно загрузить тестовый пример stepper_oneRevolution. При правильной сборке вал двигателя начнет вращаться.
При работе с моторами Ардуино может периодически перезагружаться. Это возникает из-за того, что двигателям требуются большие токи при старте и в момент торможения. Для решения этой проблемы в плату встроены конденсаторы, диоды и другие схемы. Также для этих целей на шидле имеется раздельное питание.
ДРАЙВЕР НИЗКОВОЛЬТНЫХ ЭЛЕКТРО ДВИГАТЕЛЕЙ
Основное применение аппаратной платформы Arduino – это конструирование роботов, во всяком случае, начинается знакомство с данной аппаратной платформой, как правило, именно с этого. Ходовая часть большинства колесных роботов [1] оснащается электромоторами, которые представляют собой мощную нагрузку, прямое подключение которой к портам Arduino может вызвать только выход из строя последней. Для подключения нагрузки потребляющей большой ток можно использовать самодельные релейные схемы или транзисторные ключи [2], а можно приобрести готовый драйвер для подключения электродвигателей на Ru.aliexpress.com

Устройство поставляется в обычном антистатическом пакете.

Модуль представляет собой печатную плату размером 43 х 43 мм, на которой установлена микросхема радиаторе, высота которого составляет 24 мм, масса 25 г.


Данное устройство позволяет одновременно управлять парой маломощных низковольтных электродвигателей постоянного тока. По заявлениям продавца максимально допустимый общий ток, которым можно нагрузить драйвер составляет 2 А на канал, а максимальная мощность двигателей ограничена 20 Вт. На плате хорошо видна пара двухклемных колодок для подключения электромоторов и трехклемная колодка для подачи напряжения питания.
Устройству требуется два напряжения питания 5-35 В для электродвигателей и 5 В для электронной части. При подаче питания на плате загорается индикатор подачи напряжения питания. При питания от напряжении ниже 12 В (автор проверял при 6 В), отдельный источник питания для электронной части можно не подключать.
На плате рядом с клеммой питания имеется перемычка, которую необходимо снять в случае раздельного питания силовой и электронной части [3-6]. Все колодки промаркированы с тыльной стороны платы.

Для управления нагрузкой плата драйвера имеет 6 информационных входов.

Входы IN1, IN2 задают направление вращения одного двигателя, а другая пара IN3, IN4, соответственно другого. Если на одном из входов пары присутствует низкий логический уровень, а на другом высокий, то ротор двигателя вращается в одну сторону, а если, сигналы поменяются на противоположные, то направление вращения также сменится. Если на оба входа подать низкий логический уровень, то двигатель будет остановлен. Как понимает автор, подача высокого логического уровня на оба выхода пары одновременно не допустима [7].

Если управление парой двигателей осуществляется только по четырем проводам, то двигатель развивает максимально допустимую мощность (программа L298N_1, взята из [5]). Скачать файл

Видео 1
Для управления мощностью двигателей предусмотрены входы ENA и ENB. ENA привязан к IN1, IN2, а ENB регулирует мощность двигателя, управляемого через IN3, IN4. В простейшем случае, когда нет необходимости в регулировании оборотов двигателя, эти входы замкнуты перемычками на шину питания. Для управления скоростью вращения электромоторов используется ШИМ [8-10], соответственно необходимо подключать к данным входам драйвера те порты Arduino, которые поддерживают данный режим. При этом для управления одним двигателем в данном режиме понадобится три порта Arduino (программа L298N_2, взята из [5]).

Видео 2
Как говорилось выше драйвер двигателей L298N позволяет аналогично управлять двумя двигателями, при этом, разумеется, в совокупности понадобится задействовать 6 портов Arduino.

Для демонстрации работы модуля код программ взят из [5], но следует отметить, что в примере, который демонстрирует работу пары электромоторов, допущена ошибка при назначении портов управления ENA и ENB (исправленный вариант L298N_3).
Видео 3
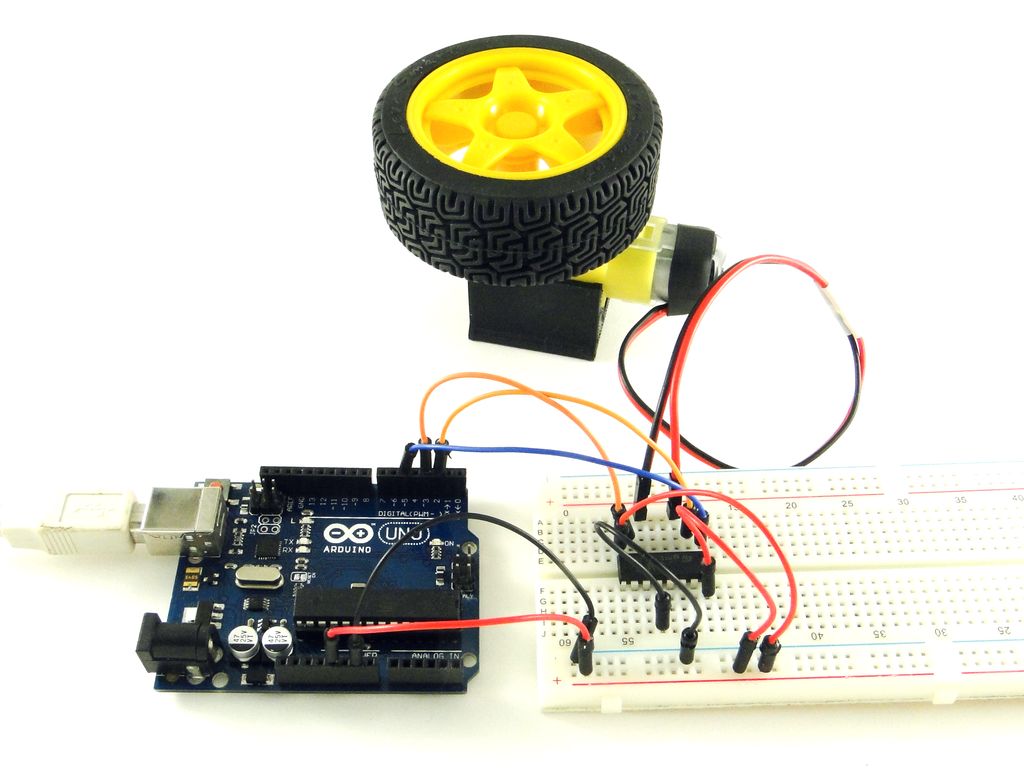
Для подключения драйвера к Arduino UNO были использованы проводники с гнездами на обоих концах. Длина проводов 10 см, эти соединительные провода были приобретены тоже на Али.

Также данное устройство можно использовать для управления шаговым двигателем [11].
Подведём итог
В целом это отличный и недорогой способ управления ходовой частью робота. Своих денег устройство однозначно стоит. Обзор подготовил специально для «Радиосхем» — Denev.
Источники
- 1) http://radioskot.ru/publ/raznoe/shassi_dlja_kolesnogo_robota/18-1-0-1122
- 2) Лекомцев Д.Г. Arduino. Подключение типовых внешних устройств. – Радио, 2016, №11, с. 51-54
- 3) http://cxem.net/arduino/arduino70.php
- 4) http://www.2150692.ru/faq/72-l298n-arduino
- 5) http://zelectro.cc/Motor_shield_L298N_Arduino
- 6) http://robot-kit.ru/article_info.php/articles_id/22/article/-font-color—993300—Draiver-motorov-na-L298N-podklyuchenie-k-Arduino—font-
- 7) Холостов К. Робот-пылесос. Журнал Левша №3 2015 г. с.12-14
- 8) Холостов К. Умный дом. Журнал Левша №2 2013 г. с.12-14
- 9) Лекомцев Д.Г. Arduino. Подключение типовых внешних устройств. – Радио, 2016, №11, с. 51-54
- 10) http://robocraft.ru/blog/arduino/58.html
- 11) http://arduino-diy.com/arduino-drayver-shagovogo-dvigatelya-i-dvigatelya-postoyannogo-toka-L298N
Форум
Обсудить статью ДРАЙВЕР НИЗКОВОЛЬТНЫХ ЭЛЕКТРО ДВИГАТЕЛЕЙ
Драйвер для двигателя постоянного тока на микросхеме L298. Схема и описание
Не так давно мы опубликовали статью о том «Как работает H-мост для двигателей постоянного тока». Сегодня представляем вашему вниманию блок управления двумя двигателями постоянного тока с малым напряжением питания. Схема, которая может быть использована для строительства небольших роботов, собрана на интегральной микросхеме L298.
Ниже фото упрощенной версии драйвера для двигателей постоянного тока на L298 без радиатора.
Микросхема L298 — это фактически двойной интегрированный силовой H-мост. Ранее мы рассмотрели теоретическую сторону использования H-моста. Сегодня займемся практической стороной этого вопроса – построим драйвер для 2-х двигателей постоянного тока. Принципиальная схема такого драйвера показана на следующем рисунке:
Каждый H-мост состоит из 4 силовых транзисторов, подключенных к логическим элементам «И», чьи выводы обеспечивают управление двигателями в обоих направлениях.
Драйвер управления двигателями разработан в двух вариантах: первый — упрощенный для обычных устройств, второй вариант для специализированного применения.
Схема драйвера с L298 – упрощенный вариант
Фактически разница между ними минимальна. У второго варианта есть дополнительные контакты для подключения датчиков тока и две клеммы для включения/выключения моста. В упрощенной же версии мосты всегда включены, а минусовые выводы (1 и 15) связаны непосредственно с землей.
Схема драйвера с L298 – полная версия
Драйвер L298 может работать с напряжением до 46 В и токами до 2 А на канал (всего 4А) в непрерывном режиме, хотя лучше не превышать общую мощность. С двигателями мощностью более 10 Вт лучше всего установить радиатор, как показано на фотографии.
Давайте проанализируем работу электронных схем драйверов в двух версиях. Помимо микросхемы L298 в схемах использованы несколько дополнительных компонентов. Логической части L298 требуется источник питания на 5В, и поэтому использован стабилизатор напряжения 78L05, который является маломощным вариантом классического 7805. Стабилизатор 78L05 обеспечивает максимальный выходной ток до 100 мА, что более чем достаточно для наших целей.
Для того чтобы визуально отслеживать направление вращения каждого двигателя, в схеме использованы два светодиода (красный и желтый), соединенные встречно-параллельно. На схеме мы также можем видеть 8 диодов для защиты от выбросов ЭДС самоиндукции.
Для этих диодов лучшим выбором будут диоды Шоттки, особенно, в случае если мы используем драйвер для управления двигателями средней мощности или управляем частотой вращения двигателя с помощью ШИМ (широтно-импульсная модуляция). В простых же схемах — диодов типа 1N4007 будет достаточно.
Список необходимых компонентов (упрощенная версия):
- 4 резистора по 100 Ом;
- 2 резистора по 1,8 кОм;
- 1 конденсатор емкостью 100 нФ;
- 2 электролитических конденсатора на 22 мкФ;
- 8 диодов 1N4007;
- 2 желтых светодиода;
- 2 красных светодиода;
- 1 стабилизатор 78L05;
- 1 драйвер L298.
Управляющие входы обеих версий работают с логикой 5В (TTL), хотя мы можем без проблем управлять сигналами управления на 3,3В. Резисторы, с сопротивлением 100 Ом на входах, служат только для защиты и могут быть заменены перемычками из проволоки.
Ниже в таблицах истинности мы видим логику управления. У упрощенной модели есть два управляющих входа для каждого двигателя (MA и MB), в то время как в полной версии у нас еще есть вход разрешения (ENA).
С нашем случае на данные входы не нужно дополнительно подавать сигнал, поскольку к ним уже подключены подтягивающие резисторы по 4,7кОм. Для того чтобы отключить мост, нам просто необходимо снизить напряжение до 0 В.
Список необходимых компонентов (полная версия):
- 6 резисторов по 100 Ом;
- 2 резистора по 4,7 кОм;
- 2 резистора по 1,8 кОм;
- 1 конденсатор на 100 нФ;
- 2 электролитических конденсатора 22 мкФ;
- 8 диодов 1N4007;
- 2 желтых светодиода;
- 2 красных светодиода;
- 1 стабилизатор 78L05;
- 1 драйвер L298.
Полная версия драйвера включает в себя два H-моста, которые управляют двигателями, измеряя ток потребления. Если эта функция не нужна, вы можете просто установить перемычки. Если же нам необходимо контролировать ток потребляемый двигателями, то необходимо на место перемычек установить шунтирующие резисторы и подключить соответствующую измерительную систему между контактами.
Есть некоторые причины, по которым может быть полезно измерять ток двигателей: одна из них заключается в обнаружении чрезмерного потребления тока двигателями, как в случае с мобильными роботами, когда у них блокируются колоса. Другая причина более сложная и заключается в обеспечении обратной связи для высококачественного управления ШИМ.
Как бы там ни было, для их реализации потребуется дополнительная схема для усиления сигнала с шунтирующих резисторов и специальное программное обеспечение для микроконтроллера. Но это уже выходит за рамки данной статьи.
Данная печатная плата также может быть использована для управления шаговым двигателем, но поскольку каждый шаговый двигатель для работы нуждается в двух мостах, мы можем подключить только один двигатель к плате.
www.inventable.eu
Драйвер шагового двигателя. Тестируем микросхему L9110 / Habr
Откуда «ножки» растут
В настоящее время стали доступны и приобрели популярность различные станки с программным управлением. Это лазерные и фрезерные резчики и гравёры. А так же 3D принтеры. Все эти станки имеют один общий узел — шаговый двигатель.
И этому двигателю нужен драйвер.
Принцип работы двигателя не является предметом этой статьи. Мы рассмотрим только драйвер. Всё, что нам нужно знать в данном контексте — это какие управляющие сигналы нам нужно формировать для управления шаговым двигателем. Оказывается, это самые обычные прямоугольные импульсы.
Существует некоторое количество решений драйверов от различных компаний. В нашей статье мы рассмотрим самое доступное решение драйвера L9110 и его аналог HG7881 Это решение часто используется в Arduino
Теория и практика
Я решил применить микросхему L9110 в своём проекте.
Довольно легко нагуглил datasheet. Прочитал. Всё предельно понятно. Характеристики, распиновка, таблица истинности… По всем параметрам драйвер, вроде бы подходит. Напряжение коммутации — 12 вольт, выходной ток 800 ма. — всего хватает.
А что на деле?
Не откладывая в «долгий ящик» я сделал плату, написал и запустил тестовую программу…
Первое, на что я обратил внимание в своём устройстве — то, что микросхема драйвера сильно греется. Внимание! НА ХОЛОСТОМ ХОДУ. Без нагрузки. Это что за чудеса схемотехники?
Может у меня микросхема бракованная?
Пришла в голову идея рассмотреть сей девайс поподробнее. И не один, а кучу.
Сказано — сделано.
Хорошо, что у меня была припасена панелька SO-8 и плата для моделирования.
Ну, и контроллер на базе STM32.
Собран стенд и произведены измерения.
Да, кстати, кроме непосредственно, силового узла в микросхеме заложена логика исключающее ИЛИ. В даташите это описано.
Поскольку я изучаю эффект нагрева микросхемы, лучше не ограничиваться логическими единицами и нулями, а снять реальные напряжения.
В результате измерений получилась табличка:
Рассмотрим строчки 2 и 3. Что мы здесь видим?
- Падение напряжения на выходных транзисторах, при наличии нагрузки, около полутора вольт, что при токе 0,33 ампера даёт 0,5 ватт на канал.
- На холостом ходу микросхема потребляет 0,05 А, что при напряжении 12 В даёт 0,6 ватт на канал.
Другими словами, независимо от нагрузки она потребляет около 0,5 Вт на канал. Теперь понятно, почему я об неё обжигал пальцы.
Сильный нагрев — это, конечно недостаток. Но может свою функцию микросхема выполняет хорошо? Тут пригодился недавно подаренный себе 4-х лучевой осциллограф приставка. Не ожидал, что мне так скоро потребуются все 4 луча. Для тестирования написал простенькую программку на stm32, который давно использую в различных проектах. Программа, просто, генерирует 2 прямоугольных сигналы с трёхкратной разницей частот.
Поскольку один раз увидеть лучше чем много раз прочитать — прикладываю развёртку сигналов управления.
Ничего особо сложного. Просто прямоугольные импульсы сдвинутые с разницей частоты в 3 раза.
Верхняя часть экрана — входные сигналы — нижняя — выходные.
Сразу бросается в глаза, что при различающихся значениях сигналов на входах, значения на выходах вполне чёткие Устанавливаются без задержек и с резкими фронтами.
Если же сигналы на входах совпадают — то фронт пологий. похож на разряд конденсатора.
Просмотрев документацию я не увидел ничего такого, что предвещало бы такое поведение.
Может я задал слишком высокую частоту входных сигналов? В даташите лимит не указан.
Уже зная, что у этого драйвера есть почти стопроцентный аналог HG7881 я обратился к его документации.
Она пролила больше света на эту загадочную ситуацию. Оказывается, логика работы драйвера немного шире. Две единицы на входе — это торможение ( то есть на выходе оба сигнала должно быть низкого уровня.) А два нуля на входе — это «висящие» контакты. Разрыв.
Значит два нуля на входе должны «подвешивать» выходы. Тогда, поведение разряжающегося конденсатора вполне предсказуемо. Однако две единицы на входах — должны быть надёжным нулём на выходе. А фактически это не так.
Я мог бы списать этот дефект на «китайского производителя». Однако, я тестировал микросхему по честному выпаянную из ардуиновской платы. При чём — не одну микросхему. Из нескольких плат. То есть, вероятность брака сильно снижена.
Вывод
Область применения микросхем L9110 уже, чем задекларирована, да и КПД низковат.
Рассеяние 0,5-0,6 ватта на одном ключе — это многовато. Не случайно это решение самое дешёвое.(10 центов за микросхему. на алиэкспрессе).
В следующих статьях будут рассмотрены альтернативные драйвера шаговых двигателей.
Ардуино: управление двигателем постоянного тока, L293D | Класс робототехники
Ардуино: управление двигателем постоянного тока, L293D
Составив транзисторы определенным образом, мы получим устройство для управления вращением двигателя в обе стороны. Такое устройство называется H-мост. Вот так выглядит H-мост на биполярных транзисторах:
INA и INB на рисунке — это вход слабых управляющих сигналов. В случае Ардуино, на них необходимо подавать либо 0 (земля) либо +5В. VCC — это питание двигателей, оно может быть во много раз выше напряжения управляющего сигнала. GND — это земля, общая для Ардуино и H-моста.
В зависимости от того, на какой из входов мы подаем положительный сигнал, двигатель будет крутиться в одну или в другу сторону. Как правило, в схему драйвера двигателя постоянного тока помимо самого H-моста, добавляют защитные диоды, фильтры, опторазвязки и прочие улучшения.
Микросхема драйвера L293D
Разумеется, необязательно собирать драйвер двигателя вручную из отдельных транзисторов. Существует множество готовых микросхем, которые позволяют управлять разными типами двигателей. Мы рассмотри распространенный драйвер L293D.
Микросхема представляет собой два H-моста, а значит можно управлять сразу двумя двигателями. Каждый мост снабжен четырьмя защитными диодами и защитой от перегрева. Максимальный ток, который может передать L293D на двигатель — 1.2А. Рабочий ток — 600мА. Максимальное напряжение — 36 В.
Вконтакте
Схема. Высокоамперный драйвер для двигателя постоянного тока

Это простая схема драйвера двигателя предназначена для использования с любым двигателем постоянного тока до 40 ампер. В основном это всего лишь простой генератор управления и куча силовых МОП-транзисторов. Осциллятор является элементарным, RC-цепь вокруг одного триггера Шмитта (IC1a). Когда переменный резистор повернут к D2, потенциометр P1 дает максимальное напряжение на выходе. Два диода предотвращают короткое замыкание выхода на вход. В крайних положениях P1 время зарядки и разрядки минимально.
Следующие два инвертора, IC1b и IC1c, управляют буферным каскадом, состоящем из трех параллельных инверторов, IC1d, IC1e и IC1f. Резистор R1 был добавлен для шунтирования МОП транзисторов на случай потери контакта с 40106. Общая входная емкость четырех МОП транзисторов составляет почти 8 нФ – явно слишком много для буфера, чтобы полностью зарядиться и разрядиться, когда P1 находится в крайних положениях. Это удобно, поскольку на практике это позволяет драйверу двигателя управлять полным диапазоном напряжений на выходе (т.е. 0-100 %).
Рабочая частота находится в районе 1 кГц. На прототипе измерено 1,07 кГц. Диод D3 на выходе подавляет обратную энергию ( обратная ЭДС), порожденную индуктивной нагрузкой.
Высокие выходные токи и ЭДС здесь главные проблемы. На раннем прототипе платы, дорожки к D3 были слишком узкими, и при тестировании одна из дорожек сгорела. При токе 20 А и напряжении 24 В. Схема была испытана при 40 А и 24 В с резистивной нагрузкой. Тем не менее, печатные платы, не в состоянии справиться с такими большими токами. Было решено усилить медные дорожки, несущие большой ток отрезками (около 2,5 мм2) толстого медного провода.
Потенциометр для регулировки скорости может быть установлен на плате. Радиатор лучше крепить к печатной плате 3- мм винтами. Убедитесь, что радиатор не имеет соединения с контактными площадками для МОП-транзисторов. Не забудьте изолировать все полупроводники на радиаторе. Из-за низкой частоты коммутации есть большая вероятность, что вы можете услышать гул от постоянного тока – это вполне нормально и нет причин для тревоги.

Список компонентов
резисторы
R1 = 10 кОм , 5% , 0,25
P1 = 100 кОм , 20%, линейный потенциометр, 0,2 Вт
конденсаторы
C1 = 470 мкФ 35V, 20%, 3,5 мм расстояние между выводами
С2 = 10 мкФ 25V , 20% , 2 мм расстояние между выводами
С3 = 100 нФ, 50В, 20%, керамический, 5 мм расстояние между выводами
C4 = 22 нФ, 100В, 20%, керамический , 5мм расстоянием между выводами
Полупроводники
D1, D2 = 1N4148
D3 = RURP8100
Т1- Т4 = IRFP150N
IC1 = 40106
IC2 = 78L12
Post Views: 316
Модули драйверов двигателей
Модуль 16-и канального ШИМ (PWM) контроллера на базе микросхемы PCA9685. Идеально подходит для управления 16 рулевыми машинками (сервоприводами). Интерфейс управления: I2C Напряжение питания модуля: 3-5 В Частота ШИМ: 40 — 1000 Гц Разрешение ШИМ: 12 Бит Модуль поддерживает каскадирование. ..
151.73 р.
Технические характеристики Напряжение питания силовой части (VMOT) : 5 — 35В Напряжения питания логической части (VDD) : 3-5,5В Ток максимальный, непрерывный, без дополнительного охлаждения: 1А Ток максимальный, с дополнительным охлаждением: 2.2A Дробление шага: 1/2/4/8/16 Описание DRV8825 это мик..
79.27 р.
Технические характеристики Напряжение питания силовой части (VMOT) : 8 — 45В Напряжения питания логической части (VDD) : 3-5,5В Ток максимальный, непрерывный, без дополнительного охлаждения: 1А Ток максимальный, с дополнительным охлаждением: 2.2A Дробление шага: 1/2/4/8/16/32 Описание DRV8825 это м..
123.06 р.
Технические характеристики напряжение питания: +7…+ 24 В; количество силовых каналов: 4; максимально-продолжительный ток каждого канала: 0,6 А; напряжение питания сервоприводов: 5 В; возможность реверса каждого двигателя; возможность независимого управления каждым каналом; ..
114.72 р.
Драйвер двигателей на базе микросхемы VNh3SP30. Ток до 30Ампер. Напряжение до 16В..
305.96 р.
Двухканальный драйвер двигателей на базе микросхемы VNh3SP30. Ток до 30Ампер на канал. Напряжение до 16В Позволяет управлять двумя двигателями постоянного тока или одним шаговым двигателем…
489.91 р.
Модуль драйвера двигателей на базе двух микросхем TB6612FNG в комплекте с беспроводным джойстиком SP2. Модуль способен управлять четырьмя моторами постоянного тока или двумя шаговыми двигателями. Имеет разъемы для подключения модуля Bluetooth, УЗ дальномера, сервоприводов. Теперь вашим роботом можн..
1 413.24 р.
Питание 12В, 30A..
275.25 р.
Микросхема: L293D двойной-H мост DC моторов ..
560.18 р.
Контроллер позволяет управлять одним шаговым двигателем или двумя коллекторными двигателями постоянного тока. Для подключения двигателей постоянного тока предусмотрены клеммники Напряжение питания 5..35 В Ток до 2А ..
190.57 р.
Микросхема L298N Напряжение питания: 5В Напряжение питания моторов: 5-35В Максимальный ток мотора: 2А..
192.23 р.
Микросхема L298N Напряжение питания: 5В Напряжение питания моторов: 5-35В Максимальный ток мотора: 2А..
102.89 р.
Великолепный двухканальный драйвер моторов, который идеально подходит для сопряжения микроконтроллера с двумя маленькими электродвигателями постоянного тока или для управления одним биполярным шаговым мотором. Основанные на MOSFET H-мостах намного более эффективны, чем основанные на BJT H-мостах кот..
84.72 р.
Контроллер шагового двигателя. Микросхема контроллера: TB6560 — ток удержания 25%,50%,100% в процентах от тока номинального драйвера — ток рабочий 25%, 50%, 75%, 100% в процентах от тока номинального драйвера — выбрать шаг двигателя (микрошаг) 1, 1/2, 1/8, 1/16 Максимальный ток: 3А (3,5А в пике..
329.03 р.
Модуль предназначен для управления шаговыми двигателями и двигателями постоянного тока. Содержит 2 H-моста на базе микросхем L9110S Напряжение: 2,5 — 12В Ток: до 800мА TTL/CMOS..
66.39 р.
Модуль предназначен для управления шаговым двигателем или другой нагрузкой..
31.17 р.
Модуль ключей ULN2003 для шагового двигателя..
33.32 р.
Рабочее напряжение 220 V (на входе) Регулируемое напряжение 50 — 220 V (на выходе) Максимальная нагрузка 2000 W ..
98.22 р.
Рабочее напряжение: 5 В … 30 В, защита от обратного подключения Номинальный ток 2,2: максимальный ток 5А 15а Максимальная мощность 2,3: 150 Вт Рабочая частота: 1 кГц ~ 99 кГц регулируемая, 1 кГц шаг, частота по умолчанию 20 кГц, точность около 1% Рабочий цикл: 0-100%, 1% шаг размер изделия: 79 мм ..
306.18 р.
Регулятор хода бесколлекторных двигателей. Оптимизирован для применения в мультикоптерах. Ток до 30А (пиковый ток 40А на 10 секунд) Входное напряжение 2-3s LiPo Вес 25гр..
345.52 р.
Особенности: — Контроллер может работать и с 5 и с 3.3 вольтовыми платами и управлять выходным напряжением до 6 вольт — Выбираемый с помощью перемычек один из 62 адресов — Регулируемая частота PWM сигнало до 1.6 КГц — 12-бит разрешение по каждому выводу, фактически это 4 мкс при скорости обновления ..
541.56 р.
Шилд для управления станком с ЧПУ (для cnc shield)., совместим с ардуино На данный шилд устанавливаются контроллеры шаговых двигателей такие как A4988 или DRV8825. В свою очередь шилд устанавливается на Arduino…
111.23 р.
..
356.56 р.
..
312.84 р.
..
305.37 р.