Серводвигатели – синхронные и асинхронные
Для динамичных и точных сервоприводных систем у нас тоже есть модульная система двигателей. Выберите из трех синхронных и одной асинхронной серий свой оптимальный серводвигатель: компактный, малоинерционный и мощный. Множество типоразмеров и вариантов конструктивной длины обеспечивают широкую сферу применения и надежный пусковой момент.
Что такое серводвигатели?
Серводвигатель – это двигатель, который позволяет контролировать точное положение вала двигателя, а также частоту вращения и/или ускорение. Для этого применяются соответствующие датчики и способы автоматического регулирования. Раньше серводвигатели были вспомогательными приводами, которые конструировались для применения в станках. Впрочем, своим названием серводвигатель обязан латинскому слову „servus“, что по-русски означает „слуга“. В качестве серводвигателей может использоваться асинхронный двигатель,
 То есть различие между этими двигателями заключается не в самом принципе привода, а только в их возможностях регулирования.
То есть различие между этими двигателями заключается не в самом принципе привода, а только в их возможностях регулирования.
Какие серводвигатели существуют?
Серводвигатели можно разделить на синхронные и асинхронные. Но это всегда привод, работающий в условиях электронного регулирования положения, скорости или момента – либо комбинации этих параметров. При этом предъявляются очень высокие требования к динамике, диапазонам регулирования и/или к точности движения. Серводвигатели обычно применяются в сочетании с системами автоматизации и управления
Наше предложение: Синхронные и асинхронные серводвигатели
Асинхронные серводвигатели
Асинхронные серводвигатели подходят для применения в таких системах, где большие внешние моменты инерции нужно перемещать в установках и машинах, обеспечивая высокую надежность регулирования. Для этого SEW-EURODRIVE предлагает в серии двигателей DRL. . соответствующие решения для привода.
. соответствующие решения для привода.
Синхронные серводвигатели
Синхронные серводвигатели – это приводы, в которых ротор с помощью закрепленных на нем постоянных магнитов синхронно приводится в движение вращающимся полем в статоре. Синхронный двигатель
Этот вариант привода работает от преобразователя частоты, который обеспечивает подходящий, управляемый трехфазный ток. Для этого в ассортименте SEW-EURODRIVE есть различные исполнения. Оптимизированные серводвигатели серии CMP.. можно в зависимости от применения адаптировать к высокой динамике или высоким нагрузкам. Классические сферы применения – пищевая промышленность, строительство, автомобилестроение, упаковочная техника и деревообработка.
Основной особенностью синхронных серводвигателей серии CM..являются оптимальные характеристики регулирования, высокий вращающий момент и динамика. Эти двигатели идеально подходят для применения в логистике, например в качестве приводов портальных подъемников или стеллажных кранов-штабелеров.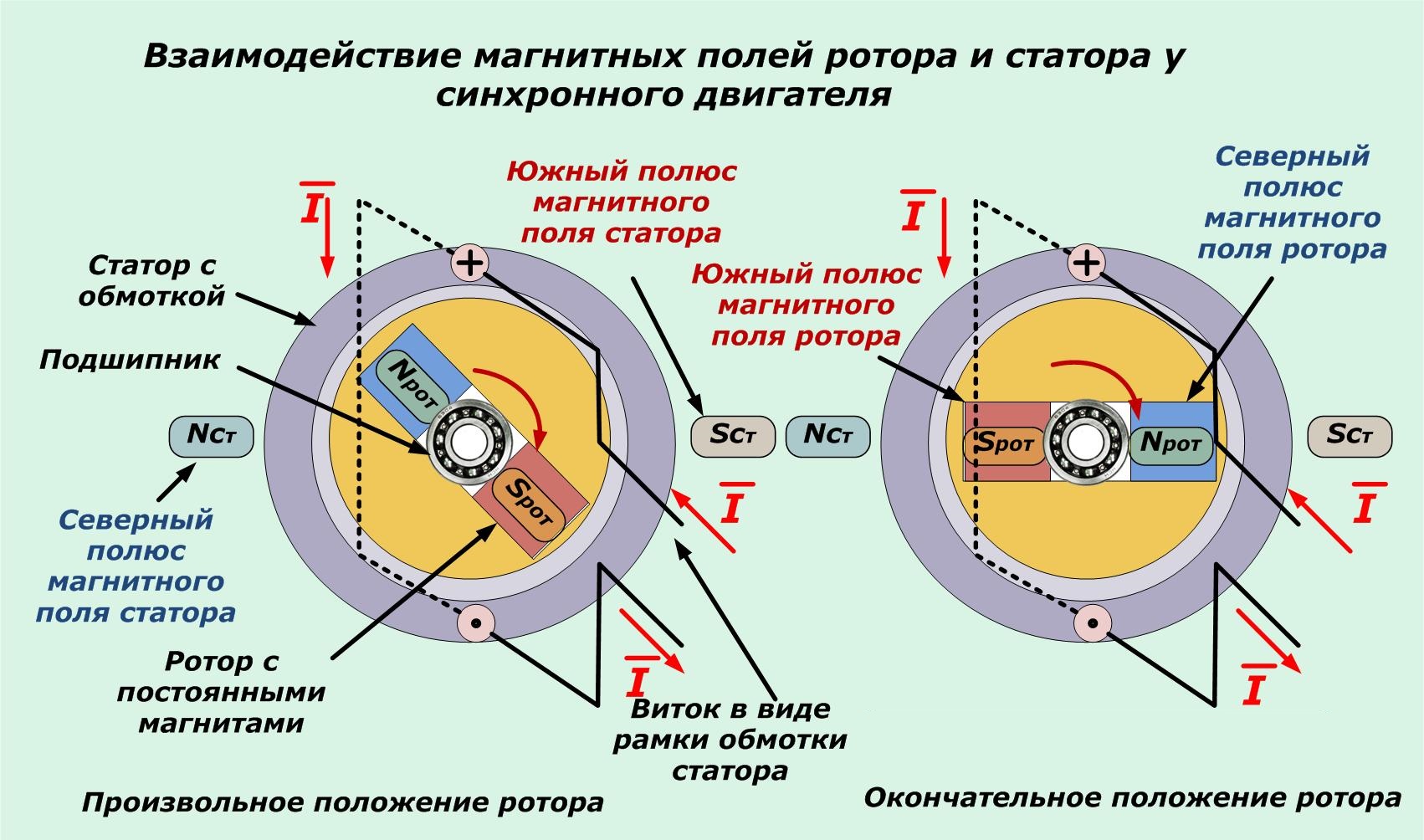
Асинхронный и синхронный двигатель: в чем разница, что лучше
Асинхронные и синхронные электродвигатели — агрегаты, действие которых преобразует электрическую энергию в механическую. Данная функция широко востребована в различных устройствах и механизмах. Чаще всего это прокатные станки, компрессоры, поршневые насосы и др. Разберем, в чем разница двух видов двигателей и чем отличаются сферы их применения.
Устройство синхронных электродвигателей
- подвижной части, представленной индуктором или ротором;
- неподвижной части, состоящей из статора или якоря;
- щеток;
- контактных колец;
- возбудителя;
- вентилятора.
Статор — часть агрегата, представляющая собой сердечник из обмоток, находящийся внутри корпуса. Основная составная часть индуктора — электромагниты постоянного тока. Сам индуктор может быть явнополюсным и неявнополюсным.
Сам индуктор может быть явнополюсным и неявнополюсным.
В роторе и статоре размещаются ферромагнитные стальные сердечники, которые уменьшают магнитное сопротивление и способствую тому, чтобы магнитный поток лучше проходил.
Наиболее востребованные трехфазные и однофазные синхронные электродвигатели, принцип работы обоих видов мало чем отличается. Обмотка якоря подключается к сети при этом ротор остается неподвижным, а постоянный ток направляется в обмотку. Когда значение среднего момента равно нулю, на ротор оказывается механическое воздействие, в результате он разгоняется до частоты, которая практически равна частоте вращения магнитного поля, затем запускается синхронный режим.
Отличие трехфазного синхронного электродвигателя в том, что расположение проводников имеет определенный угол. В них появляется магнитное поле, которое вращается с синхронной скоростью.
Принцип действия синхронного электродвигателя
Особенности асинхронных электродвигателей
Двигатели асинхронного типа отличаются конструкцией. Статор агрегата состоит из стальных листов, в его сердечнике имеются специальные пазы с уложенной в них обмоткой. Оси пазов сдвигаются на 120° относительно друг друга.
Статор агрегата состоит из стальных листов, в его сердечнике имеются специальные пазы с уложенной в них обмоткой. Оси пазов сдвигаются на 120° относительно друг друга.
Конструкция электродвигателя асинхронного типа может иметь фазный или короткозамкнутый ротор. Первый вариант предполагает наличие сердечника, имеющего алюминиевые стержни, которые замкнуты кольцами. Главное отличие от фазных в том, что последние состоят из трехфазной обмотки в форме звезды.
Вращение, защита и охлаждение конструкции осуществляется благодаря подшипникам, валу, крыльчатке, кожуху вентилятора и подшипниковым щитам.
В отличие от синхронных агрегатов статор и ротор асинхронных моделей производят магнитные поля, которые вращаются с различной частотой. Ток в роторе индуцируется бесконтактным способом, поэтому нет необходимости внедрения в систему скользящих контактов. «Заставить» вращаться агрегат в нужную сторону можно изменением направления тока в обмотке.
Строение трехфазного асинхронного двигателя с короткозамкнутым ротором
Чем отличаются асинхронные двигатели от синхронных
В чем разница двух видов двигателей переменного тока? Внешних явных отличий конструкции не имеют, те незначительные моменты, которые есть, незаметны даже профессионалам.
В асинхронном электродвигателе ротору не требуется питание током. В синхронном деталь имеет обмотку возбуждения, обладающую независимым питанием. И в первом, и во втором случае статоры идентичны и выполняют единую функцию — производят вращающееся магнитное поле.
Еще одно значимое отличие — обороты двигателя. В чем разница оборотов проявляется с практической стороны? Если конструкция требует постоянных оборотов независимо от нагрузки, рекомендуется выбирать двигатель синхронного типа подходящей мощности.
Какой двигатель лучше синхронный или асинхронный
Разобравшись, в чем разница дух видов агрегатов, уясним, какой же из них лучше для той или иной задачи. Асинхронные двигатели —общепромышленные, благодаря чему имеют широкую сферу применения. От них может работать оборудование и станки с относительно постоянной нагрузкой. Также данный тип электродвигателя актуален, если снижение оборотов из-за нагрузки не провоцирует возникновения критической ситуации на производстве.
Еще в чем разница? В цене. Производство синхронных двигателей требует больших затрат, это делает их стоимость выше. Поэтому, если допустимо незначительное уменьшение количества оборотов, выбор лучше сделать в пользу двигателя асинхронного типа.
Синхронные наиболее востребованы в электроприводах, которые не требуют изменения частоты вращения. В отличии от асинхронных они показывают более высокий КПД. Еще один важный момент в ответе на вопрос, в чем разница между двигателями кроется в длительности работы. Синхронные — это большие мощности в сотни киловатт, которые работают круглосуточно и практически не останавливаются.
Наш интернет-магазин предлагает купить асинхронные электродвигатели АИР от производителя в Украине. В каталоге представлены модели различной мощности и количества оборотов, в том числе наиболее популярные и востребованные 1000, 1500, 3000 об/мин.
Отличия асинхронных двигателей от синхронных
Применение электродвигателей в различных отраслях промышленности и быта широко распространено, в связи с экономичностью и простотой подключения и обслуживания. Для различных механизмов, применяются двигатели разной мощности и устройства. В этой статье рассмотрим, чем отличается синхронный двигатель от асинхронного, в каких механизмах они применяются и как правильно выбрать тип электрического мотора.
Для различных механизмов, применяются двигатели разной мощности и устройства. В этой статье рассмотрим, чем отличается синхронный двигатель от асинхронного, в каких механизмах они применяются и как правильно выбрать тип электрического мотора.
Асинхронные двигатели
Как и любые электрические двигатели, асинхронные моторы представляют собой устройства, которые создают крутящий момент при помощи преобразования электрического тока. Если говорить простыми словами, асинхронный двигатель – это электромотор с неравнозначной частотой вращения ротора и магнитного поля. Магнитное поле ротора в таких устройствах всегда вращается с меньшей частотой, чем поле статора.
Строение асинхронного двигателя в целом аналогично с синхронным. Он состоит из:
- Цилиндрического статора из металлических пластин с пазами для обмотки;
- Фазного либо короткозамкнутого ротора;
- Подвижных и неподвижных деталей корпуса, таких как вал, подшипники, вентилятор охлаждения, электрического оборудования.


Используется тип двигателя асинхронный в различных приводах как в промышленности, так и быту. Например, для обеспечения работы конвейеров, подъемных механизмов кранов и экскаваторов, деревообрабатывающих станков и других механизмов, как крупногабаритных, так и небольших бытовых.
Обслуживание и ремонт такого типа электромоторов не требует больших затрат, однако, для трансформации крутящего момента и понижения частоты вращения необходимо использовать редуктора различной сложности, часто с большим передаточным числом.
Синхронные двигатели
Основное отличие синхронного двигателя от асинхронного в том, что частота вращения магнитных полей при его работе совпадает, то есть является синхронной. Для синхронизации частот вращения используется дополнительный источник постоянного питания, что делает конструкцию синхронного электродвигателя сложнее и частично ограничивает сферу применения такого вида машин. Кроме того, работа такого типа двигателя возможна только с использованием частотного преобразователя.
В сфере применения, электродвигатели синхронные – это промышленные моторы большой мощности, которые используются в различных промышленных устройствах и оборудовании, где необходима повышенная мощность и возникают перегрузки.
Важной особенностью такого типа электромоторов является то, что при работе с перегрузкой устройство отдает часть реактивной мощности в сеть, что способствует повышению мощности, компенсирует падение мощности.
Синхронные двигатели бывают также таких типов:
- Гистерезисные двигатели используются в точных механизмах для создания вращения. Например, в звукозаписи, медицинском оборудовании, машиностроении
- Шаговые электродвигатели применяются в точных приборах и механизмах, таких как, например, станки с числовым программным обеспечением.
Преимущества и недостатки синхронных и асинхронных электродвигателей
Что бы определить, какой двигатель лучше синхронный или асинхронный, необходимо рассмотреть сферу применения этих устройств.![]()
Асинхронные двигатели дешевле в производстве и не требуют дополнительного питания и устройства для запуска, в отличии от синхронных, поэтому, их использование более распространено. Кроме того, подключение и обслуживание таких двигателей также стоит дешевле, как и их производство.
Синхронные двигатели, кроме повышенной мощности, обладают еще одним важным преимуществом – возможностью генерации низкой частоты вращения без использования дополнительных передач в редукторах. При этом, мощность на выходном валу остается неизменной. Синхронный двигатель имеет повышенный коэффициент полезного действия, более полно трансформируя электрическую энергию в крутящий момент.
Однако, синхронные двигатели имеют и недостатки. Кроме того, что требуется дополнительное питание и оборудование запуска, в таком типе электродвигателей происходит быстрый износ подвижных токосъемных деталей, таких как щётки и контактные кольца. Для замены изношенного оборудования требуются средства, что еще более увеличивает стоимость использования синхронных моторов.
Кроме того, настройка и обслуживание синхронных двигателей имеет ряд особенностей и требует более глубоких знаний технических особенностей.
Какой тип двигателя выбрать
При выборе типа электрического двигателя следует учитывать такие факторы:
- Сферу применения и оборудование, которое приводится в движение электродвигателем;
- Стоимость оборудования и его обслуживания;
- Тип преобразующего редуктора, применяемого для понижения скорости вращения;
- Тип питания и электрической сети.
Учитывая эти факторы и принимая во внимание расчет механизма, можно подобрать тип двигателя, который будет обеспечивать бесперебойную работу устройства, максимально экономить электроэнергию и обеспечивать необходимую мощность.
При использовании любого вида электрических двигателей стоит помнить, что срок их службы зависит от соблюдение технического регламента при подключении, настройке и последующему обслуживанию такого оборудования. При нарушении технических требований электродвигатель выйдет из строя, несмотря на его преимущества и надежность.
При нарушении технических требований электродвигатель выйдет из строя, несмотря на его преимущества и надежность.
Синхронный и асинхронный двигатель: отличия, принцип работы, использование
Классификация двигателей основывается на разных параметрах. По одному из них, различают синхронный и асинхронный двигатель. Отличия приборов, общая характеристика и принцип работы описаны в статье.
Синхронный двигатель
Этот тип двигателя способен работать одновременно и в качестве генератора, и как, собственно, двигатель. Его устройство сродни синхронному генератору. Характерной особенностью двигателя является неизменяемая частота роторного вращения от нагрузки.
Эти виды двигателей широко применяются во многих сферах, например, для электрических проводов, которым необходима постоянная скорость.
Принцип работы синхронного двигателя
В основу его функционирования положено взаимодействие вращающегося магнитного поля якоря и магнитных полей индукторных полюсов. Обычно якорь находится в статоре, а индуктор распологается в роторе. Для мощных моторов используются электрические магниты для полюсов, а для слабых — постоянные.
Обычно якорь находится в статоре, а индуктор распологается в роторе. Для мощных моторов используются электрические магниты для полюсов, а для слабых — постоянные.
Принцип работы синхронного двигателя включает в себя (кратковременно) и асинхронный режим, который обычно применяют для разгона до необходимой (то есть номинальной) скорости вращения. В это время индукторные обмотки замыкаются накоротко или посредством реостата. После достижения необходимой скорости индуктор начинают питать постоянным током.
Преимущества и недостатки
Основными минусами этого вида двигателя являются:
- необходимость питания обмотки постоянным током;
- сложность запуска;
- скользящий контакт.
Большинство генераторов, где бы они ни использовались, являются синхронными. Преимуществами таких двигателей в целом являются:
Асинхронный двигатель
Данный вид устройста представляет механизм, направленный на трансформацию электрической энергии переменного тока в механическую. Из самого названия «асинхронный» можно сделать вывод, что речь идет о неодновременном процессе. И действительно, частота вращения магнитного поля статора здесь выше роторной всегда.
Из самого названия «асинхронный» можно сделать вывод, что речь идет о неодновременном процессе. И действительно, частота вращения магнитного поля статора здесь выше роторной всегда.
Такое устройство состоит из статора цилиндрической формы и ротора, в зависимости от вида которого асинхронные двигатели короткозамкнутые могут быть и с фазным ротором.
Принцип действия
Работа двигателя осуществляется на основе взаимодействия магнитного статорного поля и наводящихся этим же полем токов в роторе. Вращающий момент появляется тогда, когда имеется разность частоты вращения полей.
Резюмируем теперь, чем отличается синхронный двигатель от асинхронного. Чем объясняется широкое применение одного типа и ограниченное — другого?
Синхронный и асинхронный двигатель: отличия
Отличие работы двигателей — в роторе. У синхронного типа он заключается в постоянном или электрическом магните. Благодаря притягиванию разноименных полюсов вращающееся поле статора влечет и магнитный ротор.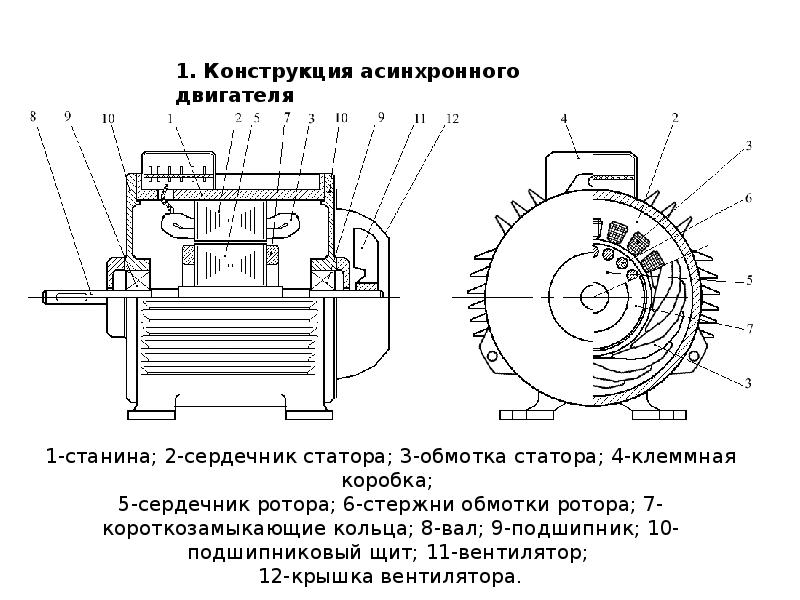 Их скорость получается одинаковой. Отсюда и название — синхронный.
Их скорость получается одинаковой. Отсюда и название — синхронный.
В нем можно добиться, в отличие от асинхронного, даже опережения напряжения по фазам. Тогда устройство, подобно батареям конденсатора, может применяться для увеличения мощности.
Асинхронные двигатели, в свою очередь, просты и надежны, но их недостатком является трудность регулировки частоты вращения. Для реверсирования трехфазного асинхронного двигателя (то есть изменения направления его вращения в противоположную сторону) меняют расположение двух фаз или двух линейных проводов, приближающихся к обмотке статора.
Если рассматривать частоту вращения, то имеют и здесь синхронный и асинхронный двигатель отличия. В синхронном типе этот показатель является постоянным, в отличие от асинхронного. Поэтому первый используют там, где необходима постоянная скорость и полная управляемость, например, в насосах, вентиляторах и компрессорах.
Выявить на том или ином устройстве наличие рассматриваемых типов приборов очень просто. На асинхронном двигателе будет не круглое число оборотов (например, девятьсот тридцать в минуту), в то время как на синхронном — круглое (например, тысяча оборотов в минуту).
На асинхронном двигателе будет не круглое число оборотов (например, девятьсот тридцать в минуту), в то время как на синхронном — круглое (например, тысяча оборотов в минуту).
И те, и другие моторы управляются достаточно сложно. Синхронный тип имеет жесткую характеристику механики: при любой меняющейся нагрузке на вал мотора частота вращения будет одной и той же. При этом нагрузка, конечно, должна меняться с учетом того, чтобы двигатель способен ее выдержать, иначе это приведет к поломке механизма.
Так устроен синхронный и асинхронный двигатель. Отличия обоих видов обуславливают сферу их использования, когда один вид справляется с задачей оптимальным образом, для другого это будет проблематичным. В то же время можно встретить и комбинированные механизмы.
Синхронный и асинхронный двигатель. Что такое синхронный двигатель
Синхронный двигатель, в отличии от своего асинхронного собрата, имеет постоянную частоту вращения при разнообразных нагрузках. Часто такие приборы применяют для приводов машин, которые работают с постоянной неизменной скоростью (например, компрессоры, вентиляторы, насосы и прочее).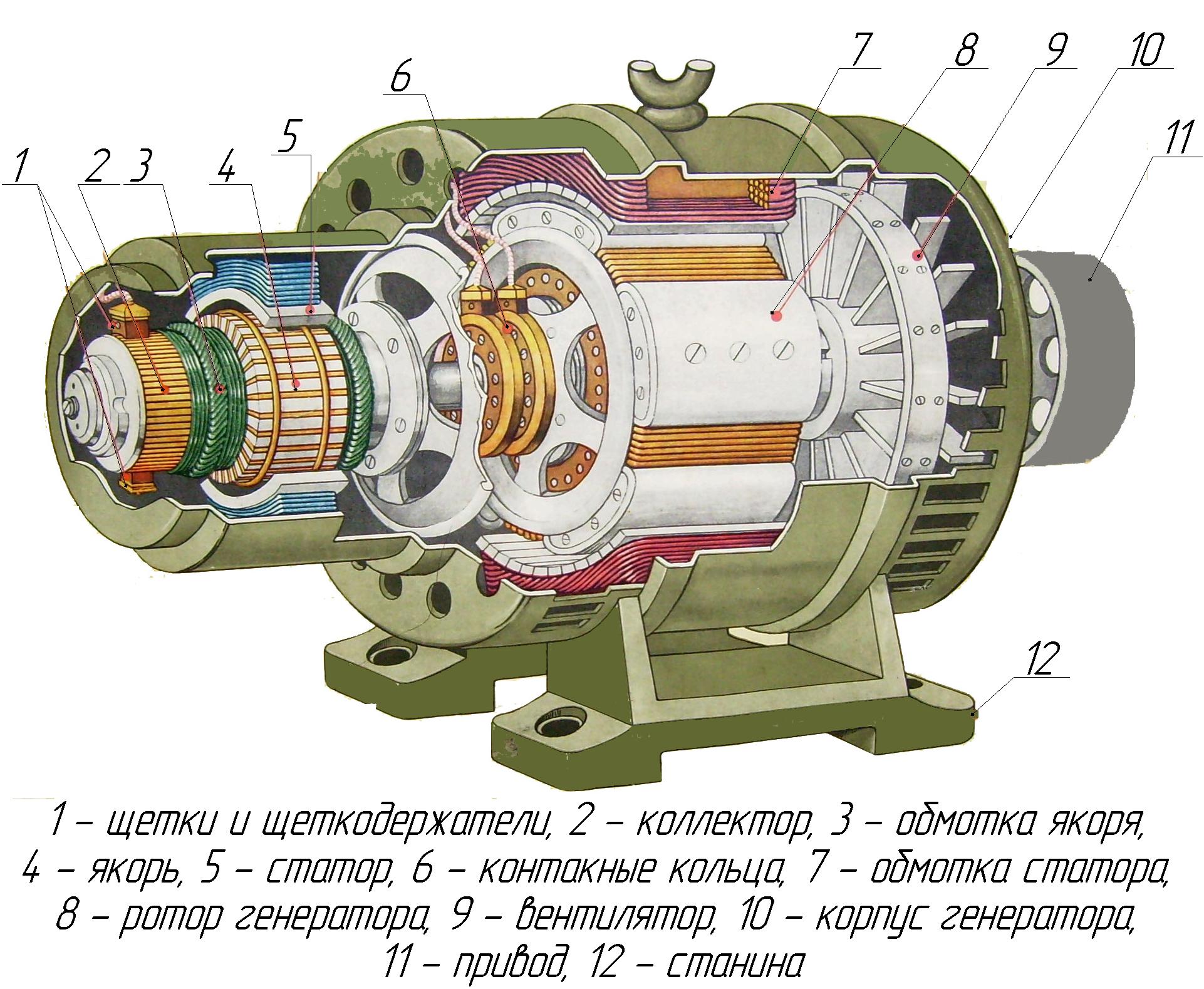
Как устроен синхронный двигатель?
В статоре такого электроприбора имеется обмотка, которая подключается к сетям трехфазного тока. Она образует собой магнитное поле, которое вращается. Ротор у такой электроэнергетической машины, как синхронный двигатель, состоит из сердечника и обмотки возбуждения. Обмотка подключается через специальные контактные кольца к источнику (обычно это источник постоянного тока или же иногда используют выпрямленный переменный ток). Электрический ток, который протекает через обмотки возбуждения, создает намагничивающее ротор магнитное поле. Синхронная машина (а двигатель довольно просто переделать в генератор, так как двигатель преобразует электрическую энергию в механическую, а генератор — наоборот, механическую в электроэнергию) обычно работает на переменном токе. На сегодняшний день есть разработки такого устройства, как синхронный двигатель переменного тока. Однако в большинстве случаев для его собственных нужд используют аккумуляторные батареи переменного тока, благодаря которым постоянный ток выпрямляется специальными приборами до состояния, аналогичного постоянному (то есть неизменному во времени значению).
Синхронный двигатель и его разновидности
В основном все отличия в конструктивном исполнении такого устройства — это модификации вращающейся детали. Ротор синхронной машины может быть с явно выраженными полюсами (его обычно называют «явнополюсный»), и с неявно выраженными полюсами (так называемый «неявнополюсный»). Явнополюсный ротор обычно имеет ярко выраженные, выступающие полюса, на которых размещаются катушки возбуждения. Неявнополюсный ротор обычно представляет собой цилиндр из ферромагнитного сплава, на поверхности которого фрезеруют пазы в осевом направлении. Впоследствии именно в эти пазы укладывают обмотки возбуждения.
Синхронный двигатель и принцип его работы
Магнитное поле статора, которое вращается, намагничивает ротор. Синхронный двигатель с постоянными магнитами имеет разное электромагнитное сопротивление по поперечной и продольной осям полюсов. Силовые линии у магнитного поля обмотки статора начнут изгибаться, потому что они будут как бы стремиться найти пути с наименьшим сопротивлением. Вследствии специфических свойств силовых магнитных линий поля, в свою очередь, такая деформация его вызовет реактивный момент. Именно поэтому ротор будет вращаться синхронно вместе с магнитным полем статора.
Вследствии специфических свойств силовых магнитных линий поля, в свою очередь, такая деформация его вызовет реактивный момент. Именно поэтому ротор будет вращаться синхронно вместе с магнитным полем статора.
Синхронный двигатель и его особенности
Нельзя не упомянуть о некоторых специфических моментах. Например, о том, что у таких машин нет пускового момента. Это происходит по той причине, что из-за своей инертности ротор просто не успевает развить нужное количество оборотов. Поэтому в настоящее время часто применяют асинхронный пуск таких двигателей.
В данной статье рассмотрим принципиальные отличия синхронных электродвигателей от асинхронных, чтобы каждый читающий эти строки мог бы эти различия четко понимать.
Асинхронные электродвигатели более широко распространены сегодня, однако в некоторых ситуациях синхронные двигатели оказываются более подходящими, более эффективными для решения конкретных промышленных и производственных задач, об этом будет рассказано далее.
Прежде всего давайте вспомним, что же вообще такое электродвигатель. называется электрическая машина, предназначенная для преобразования электрической энергии в механическую энергию вращения ротора, и служащая в качестве привода для какого-нибудь механизма, например для приведения в действие подъемного крана или насоса.
Еще в школе всем рассказывали и показывали, как два магнита отталкиваются одноименными полюсами, а разноименными — притягиваются. Это . Но существуют и переменные магниты. Каждый помнит рисунок с проводящей рамкой, расположенной между полюсами подковообразного постоянного магнита.
Горизонтально расположенная рамка, если по ней пустить постоянный ток, станет поворачиваться в магнитном поле постоянного магнита под действием пары сил (Сила Ампера), пока не будет достигнуто равновесие в вертикальном положении.
Если затем по рамке пустить постоянный ток противоположного направления, то рамка повернется дальше. В результате такого попеременного питания рамки постоянным током то одного, то другого направления, достигается непрерывное вращение рамки. Рамка здесь представляет собой аналог переменного магнита.
Приведенный пример с вращающейся рамкой в простейшей форме демонстрирует принцип работы синхронного электродвигателя. У любого синхронного электродвигателя на роторе есть обмотки возбуждения, на которые подается постоянный ток, формирующий магнитное поле ротора. Статор же синхронного электродвигателя содержит обмотку статора, для формирования магнитного поля статора.
При подаче на обмотку статора переменного тока, ротор придет во вращение с частотой, соответствующей частоте тока в обмотке статора. Частота вращения ротора будет синхронна частоте тока обмотки статора, поэтому такой электродвигатель называется синхронным. Магнитное поле ротора создается током, а не индуцируется полем статора, поэтому синхронный двигатель способен держать синхронные номинальные обороты независимо от мощности нагрузки, разумеется, в разумных пределах.
Асинхронный электродвигатель в свою очередь отличается от синхронного. Если вспомнить рисунок в рамкой, и рамку просто накоротко замкнуть, то при вращении магнита вокруг рамки, индуцируемый в рамке ток создаст магнитное поле рамки, и рамка будет стремиться догнать магнит.
Частота вращения рамки под механической нагрузкой будет всегда меньше частоты вращения магнита, и частота не будет поэтому синхронной. Этот простой пример демонстрирует принцип действия асинхронного электродвигателя.
В асинхронном электродвигателе вращающееся магнитное поле формируется переменным током обмотки статора, расположенной в его пазах. Ротор типичного асинхронного двигателя обмоток как таковых не имеет, вместо этого на нем расположены накоротко соединенные стержни (ротор типа «беличья клетка»), такой ротор называется короткозамкнутым ротором. Бывают еще асинхронные двигатели с фазным ротором, там ротор содержит обмотки, сопротивление и ток в которых можно регулировать реостатом.
Итак, в чем же принципиальное отличие асинхронного электродвигателя от синхронного? С виду внешне они похожи, порой даже специалист не отличит по внешним признакам синхронный электродвигатель от асинхронного. Главное же отличие заключается в устройстве роторов. Ротор асинхронного электродвигателя не питается током, а полюса на нем индуцирутся магнитным полем статора.
Ротор синхронного двигателя имеет обмотку возбуждения с независимым питанием. Статоры синхронного и асинхронного двигателя устроены одинаково, функция в каждом случае одна и та же — создание вращающегося магнитного поля статора.
Обороты асинхронного двигателя под нагрузкой всегда на величину скольжения отстают от вращения магнитного поля статора, в то время как обороты синхронного двигателя равны по частоте «оборотам» магнитного поля статора, поэтому если обороты должны быть постоянными при различных нагрузках, предпочтительней выбирать синхронный двигатель, например в приводе гильотинных ножниц лучше всего справится со своей задачей мощный синхронный двигатель.
Область применения асинхронных двигателей сегодня очень широка. Это всевозможные станки, транспортеры, вентиляторы, насосы, — все то оборудование, где нагрузка сравнительно стабильна, или снижение оборотов под нагрузкой не критично для рабочего процесса.
Некоторые компрессоры и насосы требуют постоянной частоты вращения при любой нагрузке, на такое оборудование ставят синхронные электродвигатели.
Синхронные двигатели дороже в производстве, чем асинхронные, поэтому если есть возможность выбора и небольшое снижение оборотов под нагрузкой не критично, приобретают асинхронный двигатель.
В целом, электрический двигатель представляет собой электромеханическое устройство, которое преобразовывает электрическую энергию в механическую.
По типу подключения двигатели бывают однофазные и 3-х фазные. Среди 3-х фазных двигателей наиболее распространенными являются индукционные (асинхронные) и синхронные электродвигатели.
Когда в 3-х фазном двигателе электрические проводники располагаются в определенном геометрическом положении (под определенным углом относительно друг друга), возникает электрическое поле. Образованное электромагнитное поле вращается с определенной скоростью, которая называется синхронной скоростью.
Если в этом вращающемся магнитном поле присутствует электромагнит, он магнетически замыкается с этим вращающимся полем и вращается со скоростью этого поля. Фактически, это нерегулируемый двигатель, поскольку он имеет всего одну скорость, которая является синхронной, и никаких промежуточных скоростей там быть не может. Другими словами, он работает синхронно с частотой сети. Ниже дана формула синхронной скорости:
В принципе, его строение практически аналогично 3-фазному асинхронному двигателю, за исключением того факта, что на ротор подается источник постоянного тока (в этом мы разберёмся позже). А пока рассмотрим основное строение данного типа двигателя.
На рисунке показано устройство этого типа двигателя. На статор подается 3-х фазное напряжение, а на ротор – источник постоянного тока.
Основные свойства синхронных двигателей:
- Синхронные электродвигатели не являются самозапускающимся механизмом. Они требуют определенного внешнего воздействия, чтобы выработать определенную синхронную скорость.
- Двигатель работает синхронно с частотой электрической сети. Поэтому при обеспечении бесперебойного снабжения частоты он ведет себя так, как двигатель с постоянной скоростью.
- Этот двигатель имеет уникальные характеристики, функционируя под любым коэффициентом мощности. Поэтому они используются для увеличения фактора силы.
Видео: Строение и принцип работы синхронного двигателя
Принципы работы синхронного двигателя
Электронно-магнитное поле синхронного двигателя обеспечивается двумя электрическими вводами. Это обмотка статора, которая состоит из 3-х фаз и предусматривает 3 фазы источника питания и ротор, на который подается постоянный ток.
3 фазы обмотки статора обеспечивают вращение магнитного потока. Ротор принимает постоянный ток и производит постоянный поток. При частоте 50 Гц 3-х фазный поток вращается около 3000 оборотов в 1 минуту или 50 оборотов в 1 секунду. В определенный момент полюса ротора и статора могут быть одной полярности (++ или – –), что вызывает отталкивания ротора. После этого полярность сразу же меняется (+–), что вызывает притягивание.
Но ротор по причине своей инерции не в состоянии вращаться в любом направлении из-за силы притяжения или силы отталкивания и не может оставаться в состоянии простоя. Он не самозапускающийся.
Чтобы преодолеть инерцию силы, необходимо определенное механическое воздействие, которое вращает ротор в том же направлении, что и магнитное поле, обеспечивая необходимую синхронную скорость. Через некоторое время происходит замыкание магнитного поля, и синхронный двигатель вращается с определенной скоростью.
Способы запуска
- Пуск синхронного двигателя при помощи вспомогательного двигателя. Синхронный двигатель механически соединяется с другим двигателем. Это может быть либо 3-х фазный индукционный двигатель, либо двигатель постоянного тока. Постоянный ток изначально не подается. Двигатель начинает вращаться со скоростью, близкой к синхронной скорости, после чего подается постоянный ток. После того, как магнитное поле замыкается, связь со вспомогательного двигателя прекращается.
- Асинхронный пуск. В полюсных наконечниках полюсов ротора устанавливается дополнительная короткозамкнутая обмотка. При включении напряжения в обмотку статора возникает вращающееся магнитное поле. Пересекая короткозамкнутую обмотку, которая заложена в полюсных наконечниках ротора, это вращающееся магнитное поле индуцирует в ней токи, который взаимодействуя с вращающимся полем статора, приводят ротор во вращение. Когда достигнута синхронная скорость, ЭДС и крутящийся момент уменьшается. И наконец, когда магнитное поле замыкается, крутящий момент также сводится к нулю. Таким образом, синхронность вначале запускается индукционным двигателем с использованием дополнительной обмотки.
Применение
- Синхронный двигатель используется для улучшения коэффициента мощности. Синхронные двигатели широко применяются в энергосистеме, поскольку они работают при любом коэффициенте мощности и имеют экономичные эксплуатационные показатели.
- Синхронные двигатели находят свое применение там, где рабочая скорость не превышает 500 об / мин и требуется увеличить мощность. Для энергетической потребности от 35 кВт до 2500 кВт, стоимость, размер, вес и соответствующего индукционного двигателя будет довольно высоким. Такие двигатели часто используются для работы поршневых насосов, компрессоров, прокатных станков и другого оборудования.
Особенностью работы двигателя является равенство скорости вращения ротора и скорости вращения магнитного потока. Поэтому скорость вала двигателя не зависит и не изменяется от величины подключаемой нагрузки. Это достигается за счет того, что индуктор синхронного электродвигателя является электромагнитом, в некоторых случаях постоянным магнитом.
Количество пар полюсов ротора одинаково с числом пар полюсов у движущегося магнитного поля. Взаимное воздействие этих полюсов дает возможность выравнивания скорости ротора. На валу в этот момент может быть любая по величине нагрузка. Она не влияет на скорость вращения индуктора.
Конструктивные особенности и принцип работыОсновными составными частями синхронного электродвигателя являются: статор, который неподвижен, и ротор, иными словами называемый индуктором. Статор имеет другое название – якорь, но от этого его суть не меняется. Эти части двигателя разделены прослойкой воздуха. Между пазами заложена трехфазная обмотка, которая чаще всего имеет соединение по .
Когда двигатель после запуска начал работать, токи якоря образуют движущееся магнитное поле, его вращение дает пересечение поля индуктора. В итоге такой работы двух полей возникает энергия. Магнитное поле статора по своей сути является полем его реакции. В работе генераторов такую энергию получают с помощью индукторов.
Полюсами являются электромагниты статора, работающие на постоянном токе. Статоры синхронных моторов могут выполняться по различным схемам: неявнополюсной, а также явнополюсной. Они отличаются положением полюсов.
Для снижения магнитного сопротивления и оптимизации условий прохода магнитного поля используют сердечники из ферромагнитного материала. Они находятся в роторе и якоре. Производятся они из электротехнической стали, которая содержит большое количество кремния. Это дает возможность снизить вихревые токи и увеличить электрическое сопротивление стали.
Синхронные электродвигатели имеют в своей основе принцип взаимодействия полюсов индуктора и статора. Во время пуска двигатель ускоряется до скорости вращения магнитного потока. Только при таком условии электродвигатель начинает действовать в синхронном режиме. При таком процессе магнитные поля образуют пересечение, возникает вход в синхронизацию.
Долгое время для разгона мотора применяли отдельный пусковой двигатель. Его соединяли механическим путем с синхронным мотором. При запуске ротор мотора ускорялся и достигал синхронной скорости. Далее мотор самостоятельно втягивался в синхронное движение. При выборе мощности пускового мотора руководствовались 15% мощности от номинала разгоняемого двигателя. Этого резерва мощности было достаточно для запуска синхронного двигателя, даже при наличии небольшой нагрузки.
Такой метод разгона более сложный, значительно повышает стоимость оборудования. В современных конструкциях синхронные электродвигатели не имеют такой схемы разгона. Применяют другую систему разгона. Реостатом замыкают обмотки индуктора по аналогии с асинхронным двигателем. Для запуска на ротор монтируют короткозамкнутую обмотку, являющуюся также и успокоительной обмоткой, которая предотвращает раскачивание ротора при синхронизации.
При достижении ротором номинальной скорости, к индуктору подключают постоянный ток. Однако, для пуска моторов с постоянными магнитами не обойтись без применения пусковых внешних двигателей.
В криогенных синхронных электродвигателях применяется обращенная конструкция. В ней якорь и индуктор размещены наоборот, индуктор находится на статоре, а якорь расположен на роторе. У таких машин возбуждающие обмотки состоят из сверхпроводимых материалов.
Достоинства и недостаткиСинхронные двигатели имеют основное преимущество по сравнению с асинхронными моторами тот факт, что возбуждение от постоянного тока внешнего источника дает возможность работы при значительной величине коэффициента мощности. Эта особенность дает возможность увеличить значение коэффициента мощности для общей сети благодаря включению синхронного мотора.
Синхронные электродвигатели имеют и другие достоинства:
- Электродвигатели синхронного типа работают с повышенным коэффициентом мощности, что создает уменьшение расхода энергии и снижает потери. КПД синхронного мотора выше при той же мощности асинхронного двигателя.
- Синхронные электродвигатели имеют момент вращения, который прямо зависит от напряжения сети. Поэтому он при уменьшении напряжения сохраняет свою мощность больше асинхронного. Это является фактором надежности подобных конструкций моторов.
Недостатками являются следующие отрицательные моменты:
- При проведении сравнительного анализа конструкций двух моторов, можно отметить, что синхронные электродвигатели выполнены по более сложной схеме, поэтому их стоимость будет выше.
- Следующим недостатком для синхронных моторов стала необходимость в источнике тока в виде выпрямителя, либо другого блока питания постоянного тока.
- Запуск двигателя происходит по сложной схеме.
- Регулировка скорости вала двигателя возможна только одним способом, с помощью применения частотного преобразователя.
В итоге можно сказать, что все-таки преимущества синхронных двигателей перекрывают недостатки. Поэтому двигатели такого вида широко применяются в технологических процессах, где идет постоянный непрерывный процесс, и не требуется частая остановка и запуск оборудования: на мельничном производстве, в компрессорах, дробилках, насосах и так далее.
Выбор двигателяК вопросу приобретения синхронного электродвигателя нужно подходить, основываясь на следующие факторы:
Условия эксплуатации электродвигателя. По условиям выбирают тип двигателя, который может быть защищенным, открытым или закрытым. А также моторы отличаются по защите токовых частей от влаги, температуры, агрессивных сред. Для взрывоопасного производства существуют специальные защиты, предотвращающие образование искр в двигателе.
Особенности выполнения подключения электродвигателя с потребителем.
Они служат для компенсирования коэффициента мощности в электрической сети и стабилизации номинального значения напряжения в местах подключения нагрузок к двигателю. Нормальным режимом синхронного компенсатора является режим перевозбуждения в момент отдачи в электрическую сеть .
Такие компенсаторы еще называют генераторами реактивной мощности, так как они предназначены для выполнения такой же задачи, как батареи конденсаторов на подстанциях. Когда мощность нагрузок уменьшается, то часто необходимо действие синхронных компенсаторов в невозбужденном режиме при их потреблении реактивной мощности и индуктивного тока, потому что напряжение в сети старается увеличиться, а для его стабилизации на рабочем уровне нужно нагрузить сеть током индуктивности, который вызывает в сети снижение напряжения питания.
Для таких целей синхронные компенсаторы обеспечиваются регулятором автоматического возбуждения. Регулятор изменяет ток возбуждения таким образом, что напряжение на компенсаторе не изменяется.
Сфера примененияШирокое использование электродвигателей асинхронного типа со значительными недогрузками делает работу станций и энергосистем сложнее, так как уменьшается коэффициент мощности системы, это ведет к незапланированным потерям, к их неполному использованию по активной мощности. В связи с этим появилась необходимость в использовании двигателей синхронного типа, особенно для приводов механизмов значительной мощности.
Если сравнивать синхронные электродвигатели с асинхронными, то достоинством синхронных стала их работа коэффициентом мощности равном 1, благодаря действию возбуждения постоянным током. При этом они не расходуют реактивную мощность из питающей сети, а если работают с перевозбуждением, то даже отдают некоторую величину реактивной мощности для сети.
В итоге коэффициент мощности сети улучшается, и снижаются потери напряжения, увеличивается коэффициент мощности генераторов электростанций. Наибольший момент синхронного электродвигателя прямо зависит от напряжения, а у синхронного электромотора – от квадрата напряжения.
Поэтому, при уменьшении напряжения синхронный электромотор имеет по-прежнему значительную нагрузочную способность. Также, применение возможности повышения возбуждающего тока синхронных моторов дает возможность повышать их надежность эксплуатации при внезапных снижениях напряжения, и оптимизировать в таких случаях работу всей энергосистемы.
Из-за большой величины воздушного промежутка дополнительные потери в стальных сердечниках и в роторе синхронных моторов меньше, чем у двигателей асинхронного вида. Поэтому КПД синхронных моторов чаще бывает больше.
Однако устройство синхронных моторов намного сложнее, а также необходим возбудитель или другое устройство питания возбуждения. Поэтому синхронные моторы имеют более высокую стоимость по сравнению с асинхронными с короткозамкнутым ротором.
Запуск и регулировка скорости у синхронных электродвигателей имеет свои сложности. Но при больших мощностях их преимущества превосходят недостатки. Поэтому они применяются во многих местах, где не нужны частые пуски, остановки оборудования, а также нет необходимости в регулировки оборотов двигателя с приводом механизмов насосов, компрессоров, мельниц и т.д.
Чем синхронный двигатель от асинхронного отличается такой вопрос часто задают на различных форумах.
Чем синхронный от асинхронного двигателя отличается
Основное отличие в том, что у асинхронного двигателя скорость вращения ротора всегда меньше, скорости вращения магнитного поля в то время как у синхронного же двигателя скорость ротора или равна или в особенных случаях конструкции кратна скорости ротора.
А так много отличий на самомм деле, но это самые основные из-за них они собственно говоря так и называются.
Асинхронные двигатели имеют простую конструкцию и надежны в эксплуатации. Недостатком асинхронных двигателей является трудность регулирования их частоты вращения.
Чтобы реверсировать трехфазный асинхронный двигатель (изменить направление вращения двигателя на противоположное), необходимо поменять местами две фазы, то есть поменять местами два любых линейных провода, подходящих к обмотке статора двигателя.
Т.е это достаточно дешевый двигатель/, который применяется везде, синхронную машину найти крайне тяжело.
В отличие от асинхронного двигателя частота вращения синхронного двигателя постоянная при различных нагрузках. Синхронные двигатели находят применение для привода машин постоянной скорости (насосы, компресоры, вентиляторы) ими легко управлять.
Отличить можно по количеству оборотав на табличке (если там явно неуказан тип машины), у ассинхронников не круглое число оборотов, 950 об/мин у синхронной машины 1000 об/мин.
Разработка энергоэффективых электродвигателей и генераторов
Контакты: Прахт Владимир Алексеевич
7(343) 375-45-64
+7 909 028 49 25
Синхронные реактивные электродвигатели
Повышение энергоэффективности асинхронных двигателей до класса энергоэффективности IE3 (стандарт IEC 60034-30) и выше обеспечивается за счет применения литой медной обмотки вместо алюминиевой, что значительно усложняет технологию производства ротора и увеличивает стоимость двигателя. Подобные асинхронные двигатели выпускают ведущие зарубежные производители.
В последние годы на рынке появились энергоэффективные двигатели (класса IE3 и IE4) новых конструкций. Одной из машин такого типа является синхронный реактивный двигатель. Технология производства синхронных реактивных двигателей не требует применения дорогостоящих материалов (например, постоянных магнитов) или выполнения сложных технологических операций. Основное отличие синхронных реактивных двигателей от асинхронных – отсутствие литой обмотки. Ротор синхронного реактивного двигателя состоит из листов ламинированной стали. За счет этого синхронный реактивный двигатель превосходит асинхронный по технологичности изготовления и себестоимости.
В институте проводятся исследования и разработки высокоэффективных и экономичных синхронных двигателей и способов их применения.
Электрические машины из порошковых композиционных магнитомягких материалов
В настоящее время отработаны технологии производства порошковых композиционных магнитомягких материалов (ПКММ) на основе порошкообразного железа, не уступающих по характеристикам изотропной динамной стали. Эти ПКММ могут применяться в электромеханике.
При изготовлении электрических машин из ПКММ с использованием технологии пресс-формования обеспечивается безотходное производство и тем самым существенно снижается себестоимость продукции. Использование ПКММ позволяет изготавливать электрические машины новых конструкций, в которых отсутствуют лобовые части обмотки, лучше используется объем магнитопровода статора. Это позволяет снизить массогабаритные характеристики и повысить энергоэффективность машины.
В институте проводятся исследования и научное сопровождение разработок электрических машин новых конструкций из порошковых композиционных магнитомягких материалов.
Электродвигатели с обмоткой возбуждения на статоре
В институте проводятся исследования и разработки электродвигателей с повышенными энергосберегающими и улучшенными стоимостными характеристиками на базе конструкции с обмоткой возбуждения на статоре.
Однофазный электродвигатель с обмоткой возбуждения на статоре по сравнению с трехфазным асинхронным двигателем имеет более простой и надежный ротор, не требующий балансировки даже при разработке высокосортных приложений, существенно простой и дешевый блок управления электродвигателем, хорошие массогабаритные показатели.
Однофазный электродвигатель с обмоткой возбуждения на статоре по сравнению с вентильным реактивным электродвигателем имеет следующие преимущества: простой и дешевый инвертор (преобразователь частоты) для управления электродвигателем, меньшие пульсации момента, лучший гармонический состав, удовлетворяет требованиям по электромагнитной совместимости без применения корректора коэффициента мощности.
Двигатель с обмоткой возбуждения на статоре и инвертор может быть спроектирован для питания от однофазной и трехфазной сети. Возможно также исполнение двигателя с обмоткой возбуждения на статоре в трехфазном исполнении.
Бесщеточные электродвигатели для электроинструмента
В производстве электроинструмента используются ненадежные щеточные электродвигатели, дорогие вентильные двигатели с магнитами на роторе, тяжелые и большие по габаритам электродвигатели без магнитов в конструкции.
Отработана конструкция однофазных бесщеточных электродвигателей, которая позволяет использовать предельно простой и надежный зубчатый ротор, выполненный из стали.
Размещение постоянных магнитов на неподвижном статоре обеспечивает высокую удельную мощность, низкую массу электродвигателя и повышенный ресурс работы. Применение в электроинструменте однофазных бесщеточных электродвигателей данной конструкции обеспечивает повышенный ресурс работы, более низкую цену электродвигателя, его массу и габариты, простой, сбалансированный и надежный ротор, высокие энергетические характеристики.
Пуск асинхронных двигателей синхронных двигателей
Прямой пуск короткозамкнутых двигателей. Коротко-замкнутые асинхронные двигатели обычно пускаются непосредственно от сети на полное напряжение. Начальный пусковой момент М и начальный пусковой ток 1 короткозамкнутых двигателей при пуске под полным напряжением колеблются в зависимости от синхронной скорости вращения, мощности и формы исполнения ротора. [c.508]Вполне аналогичными по своим свойствам в отношении os асинхронные двигатели. Преимущества таких двигателей по сравнению с синхронными заключаются в легком пуске в ход с хорошим вращающим моментом и большой допустимой перегрузке недостатком их является плохое использование обмоток ротора вследствие неравномерного распределения тока возбуждения (постоянного) между обмотками отдельных фаз, а вследствие этого понижение мощности двигателя по сравнению с мощностью, развиваемой им при работе асинхронным двигателем. Другим недостатком синхронизированных асинхронных двигателей является по необходимости пониженное напряжение цепи возбуждения постоянного тока. Это напряжение поднять не представляется возможным, так как при разгоне двигателя в роторе двигателя получались бы слишком высокие напряжения, вызывающие необходимость усиления изоляции и удорожания обмотки ротора. Синхронизированные асинхронные двигатели так же, как и нормальные синхронные двигатели, могут быть использованы в качестве синхронных конденсаторов. Необходимость иметь особый возбудитель низкого напряжения усложняет и удорожает конструкцию синхронно — асинхронных двигателей, особенно при малых мощностях. В силу этого были предложены новые типы синхронизированных асинхронных двигателей, в к-рых необходимый постоянный ток для возбуждения вырабатывается в самом же двигателе [c.228]
Привод насоса с синхронным электродвигателем и статическим преобразователем частоты (вентильный электропривод) состоит из статического преобразователя частоты с естественной коммутацией, синхронного неявнополюсного электродвигателя и возбудителя с системой управления (рис. 4.27), Синхронный двигатель более надежен по сравнению с асинхронным и обладает высоким пусковым моментом и малыми пусковыми токами, чем обеспечивается пуск ГЦН из турбинного режима. [c.131]
Пуск синхронного двигателя. Пуск синхронного двигателя может быть а) асинхронным, б) от вспомогательного двигателя. [c.536]
Автоматизация ускорения по частотному принципу. Этот принцип практически используется для асинхронных двигателей с кольцами и для синхронных двигателей. В роторе двигателей того и другого типа при пуске [c.67]
Автотрансформатор применяется для понижения напряжения при пуске синхронных н асинхронных двигателей и для других целей. [c.393]
Пусковые характеристики. Синхронный двигатель пускается как асинхронный, т. е. при пуске ротор не возбуждается постоянным током, а вращающий момент создается взаимодействием токов обмотки статора и пусковой обмотки, причем ток в пусковой обмотке создается благодаря трансформаторной связи обеих упомянутых обмоток. [c.406]
Основные параметры при асинхронном пуске синхронного двигателя следующие. [c.406]
Запуск синхронных двигателей, как и короткозамкнутых асинхронных, может производиться либо при полном, либо при пониженном напряжении сети. Выбор способа пуска синхронных двигателей определяется теми же соображениями, что и короткозамкнутых асинхронных. [c.441]
При прямом пуске после подключения статора синхронного двигателя к сети последний разворачивается в асинхронном режиме с замкнутой на сопротивление обмоткой возбуждения до под-синхронной скорости. Затем обмотка возбуждения подключается к источнику постоянного тока,и двигатель втягивается в синхронизм. При пуске с пониженным напряжением возбуждение может включаться либо на ступени пониженного напряжения (легкий пуск), либо после подключения статора к полному напряжению сети (тяжелый пуск). В отдельных случаях запуск синхронных двигателей производится с наглухо подключенным возбудителем. [c.441]
Способы пуска. В настоящее время всегда применяется асинхронный пуск синхронных двигателей. [c.511]
Начальный пусковой ток асинхронных двигателей с короткозамкнутым ротором частотой 50 Гц, мощностью более 0,6 кВт и синхронных двигателей при асинхронном пуске [c.202]
Электроприводы с электромагнитными муфтами. Применение муфт позволяет разделить пуск двигателя и механизмов, уменьшить время протекания пускового тока, устранить удары в механических передачах, ограничить перегрузки и проскальзывание ленты конвейеров или колес тележек на путях и обеспечить плавность разгона механизмов. Использование муфт позволяет применять без ограничения мощности двигатели с короткозамкнутым ротором и синхронные двигатели с асинхронным пуском. Резкое уменьшение пусковых потерь в двигателях снимает ограничения по допустимому числу включений. Уменьшается износ ленты конвейеров, колес тележек, шестерен редукторов и т. д. [c.55]
Данные о допускаемых мощностях двигателей приводятся в каталогах заводов — изготовителей генераторов. Так,-синхронные генераторы типа ЕСС обеспечивают пуск асинхронного короткозамкнутого электродвигателя мощностью до 70% мощ ности генератора. За счет действия системы компаундирования напряжение гене ратора снижается не более чем на 40% номинального значения. [c.26]
Генератор собственных нужд — ГСЯ — трехфазный синхронный с явно выраженными полюсами, с самовозбуждением через трехобмоточный трансформатор ТС и выпрямитель ВЗ. ГСП питает обмотку возбуждения СГ через трансформатор ТВ, выпрямитель В2, тиристорный регулятор возбуждения ТРВ и блок гашения поля БГП. От него же получают питание асинхронные двигатели вспомогательных агрегатов — вентиляторов холодильника MX, тяговых двигателей МТ преобразовательной установки МП, а также приводы тормозного компрессора МК и водяного насоса MB цепи заряда аккумуляторной батареи А Б через тормозное зарядное устройство УЗА и резисторы заряда СЗБ. На выход УЗА подключены все потребители тепловоза — освещение, отопление кабины и т. д. (на схеме не показаны). Пуск дизеля осуществляется от стартерного двигателя постоянного тока С, питаемого от А Б через пусковой контактор КП. Для исследований может быть осуществлен пуск дизеля от А Б через тяговые инверторы и синхронный генератор (эти дополнительные цепи и устройства не показаны). [c.192]
П1. Синхронный двигатель трехфазного тока с асинхронным пуском [c.680]
Синхронный двигатель с асинхронным пуском (с муфтами и без них) применяется для мощных конвейеров (свыше 300 кет). Используется также в качестве первичного двигателя агрегата Г—Д (например, для канатных дорог), [c.684]
Необходимо дальнейшее исследование и синхронных двигателей для нерегулируемых и регулируемых электроприводов. Возможность асинхронного пуска и затем регулирование возбуждения в синхронных двигателях позволяет использовать их для работы при ударной нагрузке. Много таких двигателей используется в качестве привода генераторов, питающих двигатели прокатных станов. Автоматическое регулирование тока возбуждения в момент преодоления пика нагрузки приводит к тому, что синхронный двигатель не выпадает из синхронизма. Обладая специфическими свойствами повышения коэффициента мощности при высоких энергетических показателях, синхронный двигатель может, в отличие от асинхронного, обеспечить высокую жесткость механических характеристик в широком диапазоне скоростей при изменении частоты питающего тока. Таким образом, представляют большой интерес вопросы экономического частотного регулирования скорости и автоматического регулирования возбуждения синхронных двигателей для приводов с ударной нагрузкой. Регулирование скорости синхронного двигателя, так же как и асинхронного, можно осуществить посредством схем с применением тиристоров. Дальнейшие исследования и разработка научной методики расчета переходных процессов в синхронных двигателях являются весьма актуальными. [c.226]
Выбор электрического типа двигателя переменного тока с нерегулируемой скоростью. По экономическим соборажениям для приводов с нерегулируемой скоростью, которые не рассчитываются на большую частоту пуска в ход, следует применять исключительно двигатели переменного (трёхфазного) тока одного из следующих трёх электрических типов 1) короткозамкнутые асинхронные 2) синхронные 3) асинхронные с кольцами. Выбор решается экономическими соображениями с учётом влияния коэфициента мощности ( os электрической энергии. В отношении os синхронный двигатель, работающий при os р = = 1 или os ip = 0,8 при упреждающем токе. Преимущество короткозамкнутого двигателя заключается в более простой конструкции и, следовательно, в меньшей первоначальной стоимости. В современной практике в основном применяются короткозамкнутые и синхронные двигатели. При мощностях примерно до [c.19]
Обычные способы пуска в ход. К этим способам принадлежат следующие виды пуска в ход С. д. 1) при помощи машины, сцепленной с С. д., 2) посредством постороннего двигателя. 1) Если С. д. связан напр, с машиной постоянного тока, то агрегат м. б. пущен со стороны постоянного тока от аккумуляторной ба-тереи или какого-либо другого источника энергии. В этом случае машина постоянного тока приводится во вращение, как двигатель,и, когда скорость вращения достигает синхронной, возбуждают синхронный двигатель присоединение С. д. параллельно к сети переменного тока производится обычным путем, после того как достигнуты синхронизм и полное совпадение фаз напряжения. После присоединения С. л. к сети машина постоянного тока из двигателя переводится в генератор посредством соответствующей регулировки возбуждения. В некоторых случаях в качестве пускового двигателя м. б. использован возбудитель С. д., если мощность этого возбудителя достаточна для этих целей. 2) Часто случается, что С. д. приходится одному работать на привод и не всегда налицо источник постоянного тока, при помощи к-рого можно запустить в качестве двигателя машину постоянного тока, связанную с С. д. тогда для пуска в ход С. д. применяют асинхронный двигатель, причем ротор пускового асинхронного двигателя снабжается короткозамкнутой обмоткой или обмоткой в виде беличьего колеса. Сущность способа пуска в ход при помощи асинхронного двигателя заключается в следующем пусковой асинхронный двигатель, имеющий обычно на два, а иногда на четыре полюса меньше, механически связывается с С. д. Вследствие меньшего числа полюсов асинхронный двигатель может привести во вращение синхронную невозбужденную машину со скоростью выше номинальной. При возбуждении С. д. асинхронный двигатель нагружается, скорость вращения ротора начинает падать, пока скорость вращения С. д. не станет равной синхронной скорости, и при наступлении этого улавливается наиболее благоприятный момент для параллельного включения двигателя к сети. Пусковые двигатели с беличьим колесом не всегда удобны по той причине, что если-момент синхронизма пропущен, то прежде всего нужно охладить беличье колесо и лишь затем приступить к вторичному пуску. Затем не всегда возможно хорошо рассчитать беличье колесо на том основании, что потери холостого хода С. д. со временем меняются. Поэтому иногда приходится исправлять беличье колесо, удаляя несколько стержней или подпиливая соединительное кольцо. Если ротор пускового двигателя снабжен обмоткой, то в некоторых случаях для получения более надежной синхронизации в цепь обмотки ротора вводят реостат, к-рый конечно усложняет и удорожает всю установку. Пусковой ток при пуске в ход асинхронным двигателем составляет 30— 40 % номинального тока С.д. Период пуска длится 5—7 мин., а иногда и более. Мощность пускового двигателя составляет ок. 10% номинальной мощности С. д., если последний запускает ся вхолостую. Если синхронный двигатель приводит в действие насос или компрессор, то пусковой вращающий момент должен быть значителен, что ведет к увеличению пускового двигателя и затруднению самого пуска в ход. [c.428]
При анализе переходных и установившихся процессов в синхронных электродвигателях используются допущения, аналогичные рассмотренным применительно к асинхронным двигателям. Электродвигатель считается явнополюсным, имеющим короткозамкнутую демпферную обмотку, используемую при прямом (асинхронном) пуске. Уравнения электромеханических переходных процессов в синхронных двигателях принято составлять в координатных осях d, q, О, неподвижных [c.27]
Карликовые двигатели и микродвигатели. Карликовыми двигателями называются двигатели с мощностью от 1 до 100 Ш, микродвигателями — мощностью менее 1 в/и. Сюда относятся двигатели 1) постоянного тока а) шунтовые, б) сериесные, в) компаунд-ные, г) универсальные 2) трёхфазного тока а) коллекторные универсальные, репульсионные, б) репульсионно-индукционные, в) короткозамкнутые, г) синхронные различных конструкций 3) однофазные асинхронные двигатели а) с пуском вручную, б) со вспомогательной фазой и самоиндукцией, в) двигатели, у которых главная фаза с сопротивлением, вспомогательная — с самоиндукцией, г) двигателя, имеющие вспомогательную фазу с ёмкостью, д) со вспомогательной фазой в виде замкнутого кольца. Все они находят применение в быту, в промышленной и лабораторной практике и в авиации [37, 58]. Заграничная практика показывает большой рост применимости электродвигателей этой группы. Универсальные двигатели могут работать как на постоянном, так и на переменном токе при числах оборотов до 80—100 тыс. в минуту. [c.23]
На движущихся дорожных машинах чаще, а на стационарных — реже в качестве источников энергии применяют дизель-генераторы переменного тока, от которых могут питаться короткозамкнутые асинхронные-лвигатели, имеющие мощности, соизмеримые с мощностью синхронного генератора. При пуске-какого асинхронного двигателя напряжение синхронного генератора может уменьшиться до значения, при котором устойчивая работа остальных потребителей хжажется невозможной, так же как и пуск включаемого двига я. Поэтому необходимо соответствующим образом выбрать соотношение мощностей двигателя и генератора с учетом коэффициента соизмеримости [c.26]
Дизель можно пустить также, используя тяговый генератор в режиме синхронного двигателя. При этом к обмоткам статора, как и при асинхронном пуске, подводится питание от полупроводникового инвертора с постепенным повышением напряжения и частоты, начиная с нулевых значений. В обмотке возбуждения поддерживается постоянное значение тока. Ротор первых оборотов вращается синхронно с полем статора. Управление тиристорами инвертора должно быть согласовано с мгновенным положением ротора, для чего в систему регулирования вводится специальный датчик, что, естественно, ее несколько усложняет. При опытных пусках дизеля тепловоза 2ТЭП6 пусковой ток аккумуляторной батареи был меньше, чем при пуске со стартером постоянного тока при меньшей продолжительности пуска. [c.95]
На рис. 1.1 представлена характеристика асинхронного двигателя, выражающая зависимость частоты вращения вала двигателя от нагрузки, т. е, от величины вращающего момента. Здесь Мцом — номинальный вращающий момент Мцач (или нуск) — момент, развиваемый при пуске двигателя Мщах — максимальный момент (кратковременный) ом — номинальная частота вращения, об/мин п р— критическая частота вращения с — синхронная частота вращения (при отсутствии нагрузки), т. е. частота вращения магнитного поля, она зависит от частоты тока / и числа пар полюсов / [c.5]
На рис. 50 показаны механические характеристики асинхронного электродвигателя, построенные по формуле крутящего момента. При п = По момент М = 0. Этот случай синхронного вращения соответствует идеально-му хЬлостому ходу машины. В первый момент пуска электро-двигателя, когда ротор еще не- 5 подвижен и 5=1, электродвигатель развивает пусковой (начальный) момент Мп, который больше номинального момента [c.69]
Двигатель-генератор представляет собой механическое соединение синхронного двигателя и синхронного генератора первый приключается к одной сети, а второй—к другой. Эта система является наиболее распространенной для соединения сетей между собой. Числа периодов сетей относятся как числа полюсов обеих машин в виду этого двигатель-генератор не может ареобразовывать энергию любой частоты в любую. Возбуждение каждой машины производится обычно от отдельного генератора постоянного тока. Агрегат доводится до синхронной скорости, необходимой для приключения двигателя к его сети, небольшим вспомогательным двигателем или, в новых установках, пользуются асинхронным пуском. В этом случае синхронный двигатель имеет соответствующую конструкцию. Для возможности регулирования непосредственно агрегатом распределения мопщости, при параллельной работе с другими асинхронными машинами, статор двигателя делается поворотным. Сдвигая его относительно статора генератора, можно изменить режим работы. Синхронный двигатель обыкновенно играет и роль синхронного конденсатора— улучшает os 9 своей сети. Отметим, что минимальная мопщость агрегата при параллельной работе станций д. б. не менее 10— 15% мопщости меньшей из них при гидроустановках не менее 15—20%. Вместо синхронного двигателя иногда применяют hh- [c.308]
В асинхронных двигателях с контактными кольцами возможно иногда бывает другое переключение при малых нагрузках, имеющее также целью улучшение os обмотку ротора, рассчитанную на более высокое напряжение, чем обмотка статора (возможно лишь при относительно невысоких напряжениях переменного тока, подводимого к двигателю). Переключение для улучшения os питание двигателя совершается не со стороны статора, а со стороны ротора, и в цепь статора, играющего в этом случае роль вторичной обмотки, вводится при пуске пусковой реостат. Увеличенное сопротивление обмотки ротора при таком переключении уменьшает намагничивающий ток и индукцию в двигателе, благодаря чему уменьшается и С. ф. двигателя. Другим способом получения лучшего os асинхронных двигателях является применение вместо катушечных фазных обмоток двуслойных обмоток постоянного тока, обыкновенных или разрезных. Обмотки постоянного тока дают значительно меньшее рассеяние, благодаря чему уменьшается реактивная мощность, потребляемая двигателем, и улучшается его os 93. Повышение величины os постоянного тока против двигателей той же мощности, но с фазной обмоткой, может составить при полной нагрузке до 9% и при половинной нагрузке до 11%. Дальнейшие способы улучшения os q> в электрич. установках путем улучшения этого коэф-та у самих асинхронных двигателей сводятся к переводу асинхронных двигателей после разгона на работу в качестве синхронных двигателей путем включения постоянного тока (тока возбуждения) в обмотку ротора асинхронного двигателя или путем каскадного включения асинхронных двигателей с трехфазными коллекторными двигателями, одноякорньши преобразователями или специальными фазными компенсаторами. [c.226]
Применение синхронных, синхронно-асинхронных и компенсированных асинхронных двигате-л е й. Средством для улучшения os 9 в электрич. установках служит применение вместо обычных асинхронных двигателей двигателей, у которых os (р равен или близок к единице. В качестве таких двигателей находят применение нормальные синхронные двигатели, у к-рых os применения синхронных двигателей служат сложный пуск в ход и полная невозможность регулирования их числа оборотов. Т. о. в первую очередь синхронные двигатели могут найти применение в тех случаях, где не требуется регулирования скорости и особенно большого пускового момента. Стоимость синхронных двигателей при небольших мощностях несколько выше асинхронных, но при больших мощностях мало от них отличается. Большее междужелезное пространство, кпд такой же и даже несколько лучший, чем у асинхронных двигателей, и возможность легкого регулирования os (р синхронных двигателей являются их преимуществами. Большое значение, придаваемое в настоящее время вопросам улучшения os (р в электрических установках, повело к тому, что за последние годы области применения синхронных двигателей все более и более расширяются. [c.228]
ТР1, равной половине синхронной. С другой стороны, короткозамкнутая обмотка Р1ндукторов помогает двигателю пррхблизиться к синхронной скорости, другими словами, она уменьшает его скольжение. По достижении синхронной скорости свойства асинхронного двигателя пропадают, т. обр. обмотка наподобие беличьей клетки должна только довести ротор до скорости, достаточно близкой к синхронной, чтобы дать возможность синхронизирующей силе машины поднят затем скорость до синхронной. Если С. д. имеет не явно выраженные по люсы (цилиндрич. магнитную систему), то магнитная обмотка выполняется в виде трехфазной обмотки. На фиг. 13 представлена схема пуска в ход трехфазного С. д. с цилиндрич. ротором 1—синхронный [c.430]
Синхронизированные асинхронные двигатели. В 1901 г. шведским инж. Даниельсоном была сделана попытка обратить асинхронную машину в синхронную путем введения в ротор постоянного тока от особого источника. На фиг. 36 дана схема такой машины. Статор асинхронного двигателя присоединен к сети. Ротор Л при помощи переключателя замыкается при пуске на сопротивление А, а затем переключается на возбудитель постоянного тока Е. В его цепи появляется тогда постоянный ток, который существует в нем вместе с током частоты скольжения и создает поле, неподвижное относительно ротора. Последнее взаимодействует с враща ющимся полем статора, создавая пульсирующий синхронный момент. При достаточно сильном поле постоянного тока двигатель ускоряется до синхронной скорости в те- [c.323]
АВТОТРАНСФОРМАТОР, особый тип трансформатора, первичная и вторичная обмотки к-рого не только магнитно, но и электрически соединены между собой. А, находит себе применение в тех случаях, когда напряжения первичной и вторичной сетей, связанных через А., мало отличаются друг от друга, напр, в случае понижения напряжения при пуске в ход асинхронных короткозамкнутых и синхронных двигателей, для регулирования напряжения в электропечных установках, для регулирования напряжения и распределения активных и реактивных мощностей в высоковольтных сетях и пр. А. находят также себе применение в радиотехнике и установках проводной связи. Схематически А. изображен на фиг. 1. Зажимы А— X присоединены к сети с более высоким напряжением, важимы I—X — к сети низшего напряжения. В отличие от обычного трансформатора (см.) с двумя раздельными обмотками А. является нак бы трансформатором однообмоточным, часть обмотки к-рого одновременно присоединена к первичной и вторичной Фиг. 1. сетям. Практически об- [c.174]
Машины непрерывного транспорта пускают в работу без нагрузки и под нагрузкой. Двигатель при этом должен разогнать конвейер как при незагруженной, так и при полностью загруженной ленте. Электроприводы машин непрерывного транспорта работают иногда и в тормозном режиме, примером чего может служить работа полностью загруженного эскалатора при спуске пассажиров. В связи с редкими пусками, торможениями п отсутствием требований к регулированию скорости различные машины непрерывного транспорта приводятся в действие асинхронными двигателями трехфазного тока с короткозамкнутым ротором или с контактными кольцами. Недостатком двигателей с короткозамкнутым ротором в этом случае является их большой пусковой ток, но их применение облегчает автоматизацию машин. Для мощных конвейеров иногда используются двух- и трехдвигательные приводы, состоящие из асинхронных с фазным ротором и синхронных двигателей. Наличие такого привода позволяет уменьшить износ конвейерной ленты и, кроме того, используя свойства синхронного двигателя, увеличить коэффициент мощности всей электроустановки. [c.682]
Синхронные двигатели против асинхронных двигателей
Электродвигатели бывают сотен размеров, форм и разновидностей, и огромное количество вариантов может парализовать поиск лучшего варианта.
Первым шагом в поиске любого двигателя является определение его источника питания; он питается от переменного тока или постоянного? Это разделит варианты на две широкие категории: двигатели переменного тока и двигатели постоянного тока, а также исключит любые двигатели, которые не будут работать с вашим источником питания. Тем не менее, обе эти категории по-прежнему содержат множество типов машин, поэтому эта статья поможет еще больше дифференцировать класс двигателей переменного тока (наша статья о бесщеточных и бесколлекторных двигателях).коллекторные двигатели постоянного тока подходят для широкого спектра двигателей постоянного тока). Двигатели переменного тока можно разделить на синхронные двигатели и асинхронные двигатели, и в этой статье будет дано краткое объяснение обоих, а также сравнение их рабочих характеристик и областей применения.
Асинхронные двигатели
Асинхронные двигателисчитаются одними из, если не самыми распространенными двигателями переменного тока, используемыми сегодня в промышленности. Они были одними из первых изобретенных электродвигателей, поэтому у них было достаточно времени для оптимизации для работы во многих приложениях.Они имеют относительно простую конструкцию, состоящую из внешнего статора и внутреннего ротора, которые взаимодействуют посредством эффекта электромагнитной индукции, создавая механическое вращение. Определенные типы асинхронных двигателей достигают этого вращения по-разному, и, пожалуйста, не стесняйтесь читать наши статьи о двигателях с короткозамкнутым ротором, двигателях с фазным ротором и однофазных промышленных двигателях, чтобы узнать больше. Однако, вообще говоря, цель асинхронных двигателей состоит в том, чтобы пропускать переменный ток через катушки в статоре, которые будут создавать магнитное поле, а частота колебаний источника переменного тока заставит это магнитное поле вращаться.Затем это вращающееся магнитное поле (RMF) индуцирует противоположные магнитные поля в роторе — свободно движущемся якоре, прикрепленном к выходному валу, — и вызывает полезное вращение.
Эти двигатели также известны как асинхронные двигатели, поскольку частота их переменного тока напрямую не соответствует числу оборотов выходного вала. Это явление известно как «проскальзывание» и возникает из-за того, что ротор всегда играет в магнитную игру «догоняющего» с RMF. Существование скольжения означает, что точная синхронизация с асинхронными двигателями затруднена.Как было сказано ранее, эти двигатели можно найти в бытовой технике, электромобилях и даже в крупном механизированном промышленном оборудовании, поскольку они имеют сотни скоростей, крутящих моментов, напряжений, размеров и форм. Подробнее об этих машинах читайте в нашей статье все об асинхронных двигателях.
Синхронные двигатели
Синхронные двигатели включают в себя то, чего не могут сделать асинхронные двигатели, а именно их «асинхронный» характер. Синхронные двигатели согласовывают выходную частоту вращения с входной частотой переменного тока, что позволяет разработчикам использовать эти двигатели в точно синхронизированных приложениях, таких как часы, прокатные станы, проигрыватели и многое другое.Они достигают этого, связывая магнитные полюса (пары север-юг в каждом магнитном поле) статора и ротора, так что RMF статора будет вращать ротор с точной синхронной скоростью. Есть много способов блокировки этих полюсов, и в наших статьях о реактивных двигателях и бесщеточных двигателях постоянного тока приведены конкретные примеры этих механизмов. Обратите внимание, что бесщеточный двигатель постоянного тока не является двигателем переменного тока; это связано с тем, что синхронные конструкции по своей сути не должны питаться от сети переменного тока, тогда как асинхронные двигатели обычно всегда питаются от сети переменного тока.
Синхронные двигатели по своей природе не являются самозапускающимися, то есть этим двигателям часто требуются пускатели для возбуждения их роторов до полной скорости. Эти пускатели не часто применяются с асинхронными двигателями, потому что они могут запускаться из состояния покоя без начального «толчка». Чтобы узнать больше, не стесняйтесь читать нашу статью о типах пускателей двигателей. Кроме того, несмотря на то, что их скорость является синхронной, скорость синхронных двигателей трудно изменить, и для этого требуется контроллер двигателя переменного тока, чтобы разработчики могли регулировать скорость двигателя (дополнительную информацию можно найти в нашей статье о контроллерах двигателей переменного тока).Синхронные двигатели, как правило, более дорогие, чем асинхронные двигатели, имеют более высокий КПД (> 90%) и являются отличным выбором для дробилок, мельниц, дробилок и других низкоскоростных, высокомощных приложений.
Сравнение асинхронных и синхронных двигателей
Поскольку эти два типа двигателей переменного тока все еще довольно широко распространены, в этой статье будет дано общее сравнение рабочих характеристик каждого типа, чтобы разработчики могли использовать эту информацию для дальнейшего определения машины, наиболее подходящей для их спецификаций.Ниже, в Таблице 1, показано качественное сравнение некоторых общих характеристик асинхронных и синхронных двигателей, а также визуализированы преимущества и недостатки каждой конструкции двигателя переменного тока.
Таблица 1: Сравнение асинхронных и синхронных двигателей.
Характеристики | Асинхронные двигатели | Синхронные двигатели |
Сложность | Простой дизайн | Комплекс |
Самозапуск | Обычно да | Обычно нет |
Плотность мощности | В среднем | Высокий |
Эффективность | В среднем | Высокий |
Контроль коэффициента мощности | Нет (всегда с запаздыванием) | Да (может опережать и отставать) |
Стоимость | Низкий | Высокий |
Сложность (или ее отсутствие) асинхронных двигателей является их лучшим преимуществом перед синхронными конструкциями.Их очень просто производить, эксплуатировать и обслуживать, поэтому асинхронные двигатели в целом дешевле синхронных двигателей. И наоборот, реализация синхронной машины требует более сложного ротора, который труднее изготовить/ремонтировать, а также требует покупки и установки дополнительных цепей, чтобы эти двигатели могли работать эффективно.
Как указывалось ранее, асинхронные двигатели обычно запускаются самостоятельно, а синхронные двигатели — нет. Это означает, что для эффективной работы асинхронных двигателей требуется меньше внешних периферийных устройств, что снижает их стоимость и сложность.
Удельная мощность — это количество энергии (обычно измеряемой в лошадиных силах, л.с. или киловатт-кВт), вырабатываемой на единицу объема двигателя. Синхронные двигатели обычно имеют более высокую удельную мощность, чем асинхронные двигатели сопоставимого размера, что позволяет им обеспечивать большую мощность при меньшем объеме. Это отлично подходит для приложений с ограниченными размерами и является причиной выбора синхронного двигателя вместо асинхронного двигателя.
Синхронные двигатели в некоторых случаях могут достигать КПД >90% и, как правило, более энергоэффективны, чем асинхронные двигатели.КПД зависит от конкретного типа и размера двигателя, но отсутствие скольжения в синхронных двигателях означает меньше потерь энергии при преобразовании электрической энергии в механическую.
Коэффициент мощности представляет собой отношение рабочей мощности к полной мощности и выражается в процентах, чтобы показать эффективность распределения мощности и связанные с ней потери. Например: Фабрика должна работать на 1000 кВт (рабочая мощность), а электрический счетчик, подключенный к источнику питания, показывает 1250 кВА (полная мощность, которая имеет единицы киловольт-ампер, или кВА, и составляет используется для передачи энергии индуктивным нагрузкам, таким как катушки двигателей, провода и т. д.). Таким образом, коэффициент мощности для этой фабрики составляет 1000/1250 = 0,8 или 80 %, что означает, что только 80 % тока, подаваемого на фабрику, совершает полезную работу, а 20 % теряется из-за нагрева и других неэффективных действий. Инженеры могут помочь компенсировать эти потери, используя синхронные двигатели, чтобы «опережать» коэффициент мощности или генерировать энергию обратно в систему (помните, что двигатели также могут работать как электрические генераторы, если им дается входное вращение). Часто синхронные двигатели работают в паре с асинхронными двигателями для компенсации индуктивных потерь мощности асинхронного двигателя, что представляет собой еще одно огромное преимущество синхронных двигателей.
Наконец, общей чертой синхронных и асинхронных двигателей является их ценовое разделение. По ранее объясненным причинам синхронные двигатели дороже в производстве, реализации, обслуживании и ремонте, чем асинхронные двигатели. Однако можно сделать вывод, что их возможности энергосбережения и коррекции коэффициента мощности могут компенсировать их более высокие первоначальные затраты. Верно ли это или нет, в конечном итоге зависит от конкретных приложений, но это следует учитывать, поскольку общая стоимость жизненного цикла всегда должна быть минимизирована в любом проекте.
Резюме
В этой статье представлено краткое сравнение асинхронных двигателей переменного тока и синхронных двигателей. Для получения информации о других продуктах обратитесь к нашим дополнительным руководствам или посетите платформу поиска поставщиков Thomas, чтобы найти потенциальные источники поставок или просмотреть подробную информацию о конкретных продуктах.
Источники:
- https://geosci.uchicago.edu
- http://nit-edu.org/wp-content/uploads/2019/06/ch-38-Synchronous-motor.pdf
- http://www.egr.unlv.edu/~eebag/Synchronous%20Generator%20I.pdf
- http://hyperphysics.phy-astr.gsu.edu/hbase/magnet/indmot.html
- http://electricalacademia.com/induction-motor/torque-speed-characteristics-induction-motor/
Другие товары для двигателей
Больше из Машины, инструменты и расходные материалы
Разница между синхронным двигателем и асинхронным двигателем
Двигатели переменного токаделятся на два типа: синхронные двигатели и асинхронные двигатели, которые также называются асинхронными двигателями.Самая большая разница между синхронными двигателями и асинхронными двигателями (асинхронными двигателями) заключается в том, соответствует ли скорость ротора скорости вращающегося магнитного поля в статоре. Если скорость вращения ротора и скорость возбуждения статора одинаковы, такой двигатель называется синхронным; если нет, то это асинхронный двигатель. Кроме того, между ними существуют большие различия в параметрах производительности и приложениях.
Отличие в конструкции
Обмотки статора синхронных и асинхронных двигателей одинаковы, основное отличие заключается в конструкции ротора.В роторе синхронного двигателя имеются обмотки возбуждения постоянного тока, которые необходимо обеспечить внешней мощностью возбуждения, вводимой через токосъемное кольцо. Однако обмотки ротора асинхронного двигателя короткозамкнуты, что создает ток за счет электромагнитной индукции. Напротив, синхронные двигатели более сложны и дороги.
- Статор
Компоненты статора синхронного двигателя в основном такие же, как и у асинхронных двигателей, играя роль приема, вывода электроэнергии и создания вращающегося магнитного поля.В форме результата особой разницы нет. Статоры как синхронного двигателя, так и асинхронного двигателя состоят из магнитного сердечника статора, токопроводящих трехфазных обмоток переменного тока, основания к фиксирующему сердечнику, клеммной крышки и т. д. - Ротор
Синхронный двигатель: сердечник полюса ротора ламинирован стальными листами, которые пробиты стальными пластинами. На сердечник полюса надеты обмотки возбуждения, намотанные изолированными медными проводами. Для синхронного двигателя с постоянными магнитами постоянный магнит на роторе является ключевым фактором, отличающим его от других двигателей.
Асинхронный двигатель: ротор состоит из железного сердечника и обмоток, изготовлен из ламинированных стальных листов и установлен на вращающемся валу. Существует два типа ротора: с короткозамкнутым ротором и с обмоткой. Асинхронный двигатель обмотки также оснащен контактным кольцом и щеточным механизмом.
Отличие Рабочий
1. Синхронный двигатель
Синхронный двигатель вращается за счет взаимодействия между вращающимся магнитным полем, создаваемым обмотками статора при включении, и магнитным полем, создаваемым ротором.Для синхронного двигателя с постоянными магнитами он вращается за счет крутящего момента, создаваемого взаимодействием между вращающимся магнитным полем статора и вторичным магнитным полем ротора. Что касается обмотки ротора, то она не индуцирует ток при нормальном вращении двигателя и также не участвует в работе. Он служит только для запуска двигателя.
При установившейся работе синхронного двигателя существует постоянная зависимость между скоростью вращения ротора и частотой сети:
N = Ns = 120f / p
f — частота сети, p — число полюсов двигателя, Ns — синхронная скорость.
2. Асинхронный двигатель
В сердечник статора трехфазного асинхронного двигателя встроены трехфазные симметричные обмотки. После включения питания между статором и ротором возникает вращающееся магнитное поле, которое вращается с синхронной скоростью. Стержень ротора разрезается вращающимся магнитным полем, в котором возникает индуцированный ток. Включающий стержень ротора подвергается действию электромагнитной силы во вращающемся магнитном поле, при этом ротор преодолевает вращение момента нагрузки и ускоряет свое вращение.Когда электромагнитный момент равен моменту нагрузки, двигатель вращается с постоянной скоростью.
Скорость вращения асинхронного двигателя (скорость статора) меньше, чем скорость вращения магнитного поля, и эта разница называется «скольжением» и выражается в процентах от синхронной скорости:
S = (Ns-N) / Ns.
S — скольжение, Ns — скорость магнитного поля, N — скорость вращения ротора.
Различие в Применение
Синхронные двигатели в основном используются в больших генераторах, тогда как асинхронные двигатели почти используются в качестве двигателей для привода машин.
Коэффициент мощности синхронного двигателя можно гибко регулировать с помощью возбуждения. Однако коэффициент мощности асинхронного двигателя не регулируется, поэтому на некоторых крупных заводах для более применяемых асинхронных двигателей синхронный двигатель может быть добавлен в качестве модификатора фазы для регулировки коэффициентов мощности завода и интерфейса сети. Однако из-за высокой стоимости синхронных двигателей и большого объема технического обслуживания в настоящее время для компенсации коэффициента мощности обычно используются конденсаторы.
Работа синхронного двигателя не так проста, как у асинхронного двигателя, поскольку синхронный двигатель имеет обмотку возбуждения и токосъемное кольцо, требующие высокоуровневого управления возбуждением.Кроме того, по сравнению с необслуживаемым асинхронным двигателем работа по обслуживанию синхронного двигателя велика. Поэтому в качестве двигателя асинхронный двигатель является наиболее предпочтительным.
Основное различие между синхронным и асинхронным двигателем
В чем разница между синхронным и асинхронным двигателем (асинхронным двигателем)Электрические двигатели представляют собой машины, преобразующие электрическую энергию в механическую для выполнения механических операций.Эти двигатели могут быть рассчитаны на работу с переменным током (AC) или постоянным током (DC). Двигатели переменного тока делятся на два типа; Синхронные двигатели и асинхронные двигатели. Оба они имеют некоторое сходство, например, в своей конструкции, но они совершенно разные в работе и своих характеристиках.
Прежде чем перейти к списку различий между синхронным двигателем и асинхронным двигателем, мы собираемся обсудить их основы и принцип их работы. Для ясного объяснения вы можете знать разницу между однофазным и трехфазным источником питания, связанную с работой однофазных и трехфазных двигателей переменного тока.
Как работает двигатель переменного тока?Как мы знаем из нашей предыдущей статьи «Различия между двигателями переменного и постоянного тока», двигатели постоянного тока работают по принципу действия магнитного поля на проводник с током, который испытывает механическую силу. Где статор создает статическое магнитное поле, а ротор, состоящий из нескольких обмоток, несет входной постоянный ток.
В двигателях переменного тока используется идея RMF вращательного магнитного поля. Статор состоит из нескольких обмоток, которые создают переменное магнитное поле при подаче на вход переменного тока.Это магнитное поле вращается вокруг ротора.
Ротор, состоящий из обмоток или проводников с замкнутым контуром, пропускает ток либо за счет индукции, либо от внешнего источника тока, создающего собственное магнитное поле. Магнитное поле, создаваемое ротором, взаимодействует с вращающимся магнитным полем и начинает вращаться в его направлении.
Относительная разница между полем вращения статора и скоростью вращения ротора называется скольжением. если скольжение двигателя равно нулю или ротор имеет ту же скорость вращения, что и поле вращения статора, двигатель называется синхронным двигателем переменного тока.если двигатель переменного тока имеет скольжение или существует разница между скоростью вращения поля статора и ротора, двигатель называется асинхронным двигателем. Чтобы узнать больше о различных типах двигателей, обратитесь к предыдущим сообщениям о двигателе BLDC (бесщеточный двигатель постоянного тока), шаговых двигателях и серводвигателях.
Похожие сообщения:
Синхронный двигательКак следует из названия, синхронный двигатель имеет ротор, который предназначен для вращения с той же скоростью, что и его статор, вращающий магнитное поле, называемое синхронной скоростью .
Статор создает вращающееся магнитное поле при подаче переменного тока. Ротор может быть спроектирован так, чтобы генерировать собственное магнитное поле с использованием внешнего источника постоянного тока через токосъемные кольца или с использованием постоянного магнита .
Ротор предназначен для создания магнитных полюсов, равных или кратных полюсам статора. Когда статор и ротор находятся под напряжением, магнитное поле ротора блокируется вращательным магнитным полем статора, и он вращается с точной скоростью поля статора.
Из-за инерции синхронный двигатель не сразу запускается на синхронной скорости (вращательное магнитное поле). Поэтому для обеспечения пускового момента используется дополнительная обмотка, называемая «демпферная обмотка ». Он действует как асинхронный двигатель во время запуска. Таким образом, синхронные двигатели не являются самозапускающимися , им нужен дополнительный пусковой механизм.
Это может быть двигатель с независимым или невозбужденным возбуждением, т.е. первый требует отдельного источника постоянного тока, питает обмотки ротора и создает магнитное поле, а второй описывает синхронный двигатель, ротор которого предназначен для намагничивания вращающимся магнитным полем статора и вращается вместе с ним.
Ротор синхронного двигателя вращается с синхронной скоростью, которая зависит от частоты сети и полюсов обмоток статора. Следовательно, скорость двигателя не зависит от нагрузки. Чтобы изменить скорость синхронного двигателя, необходимо изменить частоту питания. Это достигается с помощью VFD (частотно-регулируемый привод).
Похожие сообщения:
Асинхронный двигательНазвание асинхронного двигателя предполагает, что скорость вращения ротора асинхронна со скоростью вращения магнитного поля статора.Точнее, ротор асинхронного двигателя вращается с относительно меньшей скоростью, чем статор RMF. Это связано с наличием проскальзывания между скоростью вращения его статора и ротора.
Ротор асинхронного двигателя представляет собой либо короткозамкнутый ротор с обмоткой. Ротор с короткозамкнутым ротором состоит из тяжелых медных стержней, соединенных на концах с помощью проводящего кольца, которое электрически замыкает их друг на друга. Ротор витого типа состоит из нескольких обмоток поверх стального многослойного сердечника.
Вращающееся магнитное поле статора вызывает индукционный ток в роторе. Этот индуцированный ток течет внутри ротора, создавая собственное магнитное поле. Согласно закону Ленца, это поле ротора противодействует причине, которая его создает, и пытается устранить ее, догоняя скорость RMF статора (синхронная скорость). При этом ротор вращается в направлении RMF статора. Поскольку он работает по принципу индукции, поэтому асинхронный двигатель также известен как асинхронный двигатель .
Асинхронный двигатель никогда не может работать на синхронной скорости, он всегда медленнее синхронной скорости и зависит от скольжения двигателя. Причина в том, что индуцированный ток в роторе генерируется из-за разницы между полем статора и ротора. если, в случае, если он работает на синхронной скорости, это означает, что ротор магнитно заблокирован, и между статором и полем ротора нет разницы. Следовательно, не было бы магнитного потока, индуцирующего ток в роторе.Магнитный поток необходим для асинхронного двигателя, поэтому он должен работать на более низкой скорости, чем его синхронная скорость.
Ротор с короткозамкнутым ротором имеет более простую конструкцию и позволяет индуцированному току протекать через медные стержни. В то время как ротор с обмоткой позволяет пользователю изменять ток ротора во время его запуска, как это используется в «Моторном пускателе». Смысл в том, чтобы безопасно запустить двигатель, уменьшив огромный пусковой ток, потребляемый асинхронным двигателем. Обычно это делается путем последовательного включения переменного резистора с обмотками ротора через токосъемные кольца.
Скорость асинхронного двигателя зависит от скольжения двигателя, которое зависит от нагрузки и сопротивления ротора. Другими словами, скорость асинхронного двигателя может изменяться в зависимости от нагрузки или за счет изменения сопротивления ротора.
Связанная запись:
Различия между синхронным двигателем и асинхронным двигателемВ следующей таблице показаны основные различия между синхронным двигателем и асинхронным (асинхронным) двигателем.
| Синхронный двигатель | Асинхронный двигатель |
| Синхронный двигатель представляет собой тип двигателя переменного тока, который работает с синхронной скоростью. | Асинхронный двигатель — это тип двигателя переменного тока, который работает на скорости ниже синхронной. |
| Работает по принципу магнитной блокировки между полем ротора и статора. | Работает по принципу электромагнитной индукции между статором и ротором. |
| Скольжение отсутствует т.е. скольжение синхронного двигателя равно 0. | В асинхронном двигателе имеется скольжение, и оно всегда больше 0. |
| Скорость двигателя зависит от частоты сети и количества полюсов статора. N с = 120 f / P | Скорость двигателя зависит от нагрузки, сопротивления ротора и скольжения, с. она всегда меньше синхронной скорости. N = N с (1-с) N < N с |
| Скорость не меняется при изменении нагрузки, подключенной к двигателю. | Скорость меняется в зависимости от нагрузки двигателя. |
| Это не самозапуск и требует дополнительных обмоток для запуска двигателя. | Асинхронные двигатели самозапускающиеся и не требуют дополнительного механизма. |
| Для ротора требуется дополнительный источник тока. | Ротор асинхронного двигателя не требует дополнительного питания. |
| Синхронный двигатель с независимым возбуждением требует дополнительного источника постоянного тока для питания обмотки ротора. | Не требует дополнительного источника. |
| Также необходимы контактные кольца и щетки для подачи постоянного тока на обмотки ротора. | Не требует токосъемных колец, однако в витом типе можно использовать токосъемные кольца для контроля скорости. |
| Скорость двигателя регулируется только путем изменения частоты питания через ЧРП. | Скорость двигателя можно регулировать с помощью переменного сопротивления ротора, а также устройств ЧРП. |
| Подача входного напряжения не влияет на скорость или крутящий момент синхронного двигателя. | Подача входного напряжения может использоваться для изменения крутящего момента и скорости двигателя. |
| Колебания сетевого напряжения не влияют на работу синхронного двигателя. | Колебания сетевого напряжения влияют на его скорость и работу. |
| Первоначальная стоимость выше, чем у асинхронного двигателя. | Асинхронные двигатели дешевле. |
| Это сложная операция. | Это операция проста и удобна для пользователя. |
| If обеспечивает высокую эффективность и точность. | Они не так эффективны, как синхронный двигатель. |
| Может легко работать на очень низкой скорости с помощью ЧРП. | Довольно сложно работать на низкой скорости. |
| Лучше всего работает при низкой скорости, обычно ниже 300 об/мин. | Лучше всего подходит для работы на скорости выше 600 об/мин. |
| Может работать с отстающим, опережающим или единичным коэффициентом мощности путем регулировки возбуждения. | Асинхронный или асинхронный двигатель всегда работает с отстающим коэффициентом мощности. |
| Он также может одновременно использоваться для коррекции коэффициента мощности, используя его в опережающем коэффициенте мощности. | Его нельзя использовать для корректировки коэффициента мощности, а только для управления механическими нагрузками. |
| Поскольку он работает с постоянной скоростью, внезапные изменения нагрузки вызовут колебания потребляемого тока. | В асинхронном двигателе такого явления нет. |
Вывод этой статьи состоит в том, что синхронные двигатели эффективны, но более дороги и используются для приложений со сверхнизкими оборотами, предлагая функцию коррекции коэффициента мощности.С другой стороны, асинхронные двигатели используются для высоких оборотов с переменной скоростью, они недороги и просты в эксплуатации.
Связанный пост об электрических двигателях.
| Всегда работает на синхронной скорости. Поэтому он называется синхронным. мотор. | Всегда работает со скоростью, немного меньшей синхронной скорости. Таким образом, он называется асинхронным двигателем. |
| Синхронный двигатель представляет собой машину двойного возбуждения, т.е.д., его арматура обмотка подключена к источнику переменного тока, а ее обмотка возбуждения возбуждается от источника постоянного тока. | Асинхронный двигатель представляет собой машину с однократным возбуждением, т. е. его статор обмотка питается от источника переменного тока. |
| Скорость не зависит от нагрузки. | Скорость уменьшается с увеличением нагрузки. |
| Самозапуск невозможен. Для запуска требуются внешние средства. | Асинхронный двигатель имеет момент самозапуска. |
| Синхронный двигатель более эффективен, чем асинхронный двигатель того же номинала | КПД асинхронного двигателя меньше, чем у синхронного двигателя того же номинала. |
| Синхронный двигатель может работать в широком диапазоне коэффициентов мощности, как с опережением, так и с отставанием. | Асинхронный двигатель работает только с отстающим коэффициентом мощности. |
| Коэффициент мощности синхронного двигателя можно изменить, изменив его возбуждение. | Коэффициент мощности асинхронного двигателя не регулируется. Он становится очень плохим (отстающим) при высоких нагрузках. |
| Отсутствие относительного движения между вращающимся магнитным полем статора (RMF) а ротор необходим для работы синхронного двигателя. | Для работы асинхронного двигателя должен быть относительный движение между RMF статора и ротором. |
| Для того же номинала синхронный двигатель дороже, чем асинхронный мотор. | Асинхронный двигатель дешевле синхронного. |
| Синхронный двигатель имеет сложную конструкцию. | Асинхронный двигатель имеет более простую конструкцию, чем синхронный двигатель. |
| Синхронный двигатель имеет более высокий пусковой момент по сравнению с асинхронным двигателем. | Асинхронный двигатель имеет меньший пусковой момент. |
| Синхронные двигатели экономичны при скоростях ниже 300 об/мин. | Асинхронные двигатели экономичны при скорости выше 600 об/мин. |
| Синхронные двигатели требуют возбуждения постоянного тока на роторе. | Асинхронные двигатели не требуют возбуждения ротора. |
| Применение — Управление механическими нагрузками с постоянной скоростью, коррекция коэффициента мощности электрических систем и т. д. | Применение − Асинхронные двигатели используются только для привода механических нагрузок. |
Синхронные и асинхронные двигатели: в чем разница
Упрощенное разделение двигателей с дробной мощностью будет следующим: переменного тока, постоянного тока, бесщеточные и универсальные. Однако так же, как обувь можно разделить на рабочие ботинки, классические туфли, кроссовки и т. д., каждая двигательная категория имеет различные подгруппы. Например, двигатели переменного тока можно разделить на синхронные и асинхронные (также известные как асинхронные).
Хотя оба работают от сети переменного тока (хотя синхронный также использует постоянный ток), их создание, работа и использование сильно отличаются.
Прежде чем разобрать две категории обсуждений переменного тока, важно помнить, что в типичном двигателе переменного тока (как более подробно объяснено в нашем блоге AC Motor Basics ) вращающееся магнитное поле создается статором, имеющим индуцируется входным током. Скорость этого поля определяется частотой источника питания и числом полюсов машины и называется «синхронной скоростью», точнее, скоростью, возникающей одновременно.
Асинхронный двигатель
Когда говорят об асинхронных двигателях, обычно имеют в виду асинхронные двигатели переменного тока. Наиболее распространенный тип, асинхронный двигатель переменного тока с короткозамкнутым ротором, обычно имеет стационарную обмотку, называемую статором, а также ротор, сделанный из электротехнической стали и токопроводящих стержней из алюминия или меди, которые закорочены на каждом конце.
Как указано выше, магнитное поле создается в статоре от переменного тока, который, в свою очередь, индуцирует токи в токопроводящих стержнях ротора.Этот эффект индукции домино приводит к притяжению между вращающимся магнитным полем статора и индуцированным магнитным полем ротора. Простое уравнение может помочь проиллюстрировать это более четко.
Источник питания переменного тока + статор = вращающееся магнитное поле #1 (синхронная скорость)
Вращающееся магнитное поле #1 + ротор = Вращающееся магнитное поле #2 (отставание от синхронной скорости)
Ротор, естественно, будет вращаться медленнее, чем синхронная скорость магнитного поля в статоре, но притяжение между компонентами статора и ротора приводит их в непрерывную игру в догонялки (за счет создания крутящего момента).Разница между этими двумя скоростями называется скольжением и обычно указывается в процентах от синхронной скорости.
Магнитное поле №1 (быстрее) – Магнитное поле №2 (медленнее) = Скольжение
Синхронный двигатель
Как вы могли догадаться, ротор синхронного двигателя вращается с той же скоростью, что и синхронная скорость. Это возможно, потому что синхронные двигатели основаны на частоте и не зависят от постоянства начального входного тока.
Представьте себе синхронисток на соревнованиях по прыжкам в воду. Их движения точно совпадают с движениями другого члена команды по плаванию — их начало, середина и точки входа потенциально идентичны.
Синхронные двигатели работают примерно так же. Однако точно так же, как потребовалось бы много времени, чтобы достичь такого уровня единообразия в их методах погружения, синхронные двигатели не достигают одинакового вращения между магнитными полями ротора и статора только с начальным входным током.Мощность переменного тока индуцирует статор (как типичный асинхронный двигатель), но затем он достигает точки запаздывания, мощность постоянного тока подается через возбудитель — устройство, которое подает на двигатель ток намагничивания для создания потока. Это позволяет вращению увеличиваться и связываться с синхронной скоростью, и, если на это не воздействуют экстремальные условия, эти скорости будут оставаться синхронизированными, что позволяет использовать высокоточные функции с помощью используемого приложения.
Это подводит нас к краткому обзору того, как различная конструкция двигателей переменного тока позволяет каждому поддерживать свою индивидуальную и разнообразную работу и использование.
Синхронный:
- Более высокая начальная стоимость
- Требуется возбудитель
- Для высокоточных приложений (таких как часы или проигрыватель)
- Наиболее эффективен в больших промышленных двигателях
- Зависит от частоты (более согласованный)
Индукция:
- Потенциально более высокая стоимость жизненного цикла
- Специальные элементы управления обычно не требуются
- Более распространенный; используется во многих повседневных приложениях
- Наиболее эффективен в небольших приложениях
- Скорость зависит от крутящего момента
Как видите, асинхронные и синхронные двигатели, хотя и классифицируются как двигатели переменного тока, имеют довольно разные конструктивные и эксплуатационные характеристики, при этом наличие скольжения является наиболее важным фактором.Из-за этого асинхронные двигатели обычно не могут поддерживать постоянную скорость в приложениях с переменным моментом нагрузки.
Синхронные двигателилучше всего подходят для более крупных приложений, тогда как Groschopp специализируется на двигателях с дробной мощностью, которые обычно не требуют атрибутов синхронного двигателя. Однако, если требуется постоянство синхронности, этот недостаток асинхронных двигателей переменного тока можно преодолеть с помощью частотно-регулируемого привода (ЧРП) или векторного привода.
Разница между синхронным двигателем и асинхронным двигателем
Опубликовано Admin
Синхронный двигатель против асинхронного двигателя
Как асинхронные, так и синхронные двигатели представляют собой двигатели переменного тока, используемые для преобразования электрической энергии в механическую.
Подробнее об асинхронных двигателях
Основываясь на принципах электромагнитной индукции, первые асинхронные двигатели были изобретены Николой Теслой (в 1883 г.) и Галилео Феррарисом (в 1885 г.) независимо друг от друга.Из-за своей простой конструкции и надежного использования, а также низких затрат на строительство и техническое обслуживание асинхронные двигатели были выбраны по сравнению со многими другими двигателями переменного тока для тяжелого оборудования и машин.
Конструкция и сборка асинхронного двигателя просты. Двумя основными частями асинхронного двигателя являются статор и ротор. Статор в асинхронном двигателе представляет собой ряд концентрических магнитных полюсов (обычно электромагнитов), а ротор представляет собой ряд замкнутых обмоток или алюминиевых стержней, расположенных подобно беличьей клетке, отсюда и название ротора с беличьей клеткой.Вал для передачи создаваемого крутящего момента проходит через ось ротора. Ротор размещен внутри цилиндрической полости статора, но электрически не связан с какой-либо внешней цепью. Для подачи тока на ротор не используется коммутатор, щетки или другой соединительный механизм.
Как и любой двигатель, он использует магнитные силы для вращения ротора. Соединения в катушках статора расположены таким образом, что противоположные полюса генерируются на противоположной стороне катушек статора.На начальном этапе создаются магнитные полюса, периодически смещающиеся по периметру. Это создает изменение потока на обмотках ротора и индуцирует ток. Этот индуцированный ток создает магнитное поле в обмотках ротора, а взаимодействие между полем статора и индуцированным полем приводит в движение двигатель.
Асинхронные двигатели предназначены для работы как с однофазными, так и с многофазными токами, последние предназначены для тяжелых машин, требующих большого крутящего момента.Скоростью асинхронных двигателей можно управлять, используя количество магнитных полюсов в полюсе статора или регулируя частоту входного источника питания. Скольжение, которое является мерой для определения крутящего момента двигателя, дает представление об эффективности двигателя. Обмотки короткозамкнутого ротора имеют небольшое сопротивление, в результате чего возникает большой ток, вызывающий небольшое скольжение в роторе; следовательно, он создает большой крутящий момент.
При максимально возможных режимах нагрузки для малых двигателей проскальзывание составляет около 4-6% и 1.5-2% для больших двигателей, поэтому считается, что асинхронные двигатели имеют регулирование скорости и считаются двигателями с постоянной скоростью. Тем не менее, скорость вращения ротора меньше, чем частота входного источника питания.
Подробнее о синхронном двигателе
Синхронный двигатель является другим основным типом двигателя переменного тока. Синхронный двигатель предназначен для работы без разницы в частоте вращения вала и частоте переменного тока источника; период вращения является целым кратным циклов переменного тока.
Существует три основных типа синхронных двигателей; двигатели с постоянными магнитами, гистерезисные двигатели и реактивные двигатели. В качестве постоянных магнитов на роторе используются постоянные магниты из неодима-бора-железа, самария-кобальта или феррита. Приводы с переменной скоростью, в которых статор питается от переменной частоты и переменного напряжения, являются основным применением двигателей с постоянными магнитами. Они используются в устройствах, которым требуется точное управление скоростью и положением.
Гистерезисные двигатели имеют сплошной гладкий цилиндрический ротор, отлитый из высококоэрцитивной магнитной «твердой» кобальтовой стали.Этот материал имеет широкую петлю гистерезиса, то есть, как только он намагничивается в заданном направлении, для обращения намагниченности требуется большое обратное магнитное поле в противоположном направлении. В результате гистерезисный двигатель имеет угол запаздывания δ, который не зависит от скорости; он развивает постоянный крутящий момент от запуска до синхронной скорости. Следовательно, он самозапускающийся и для его запуска не требуется индукционная обмотка.
Асинхронный двигатель и синхронный двигатель
• Синхронные двигатели работают на синхронной скорости (об/мин=120f/p), в то время как асинхронные двигатели работают на скорости ниже синхронной (об/мин=120f/p – скольжение), а скольжение почти равно нулю при нулевом крутящем моменте нагрузки, а скольжение увеличивается с увеличением нагрузки. крутящий момент.
• Синхронным двигателям требуется постоянный ток для создания поля в обмотках ротора; асинхронные двигатели не обязаны подавать ток на ротор.
• Для синхронных двигателей требуются контактные кольца и щетки для подключения ротора к источнику питания. Асинхронные двигатели не требуют контактных колец.
• Для синхронных двигателей требуются обмотки в роторе, в то время как асинхронные двигатели чаще всего имеют проводящие стержни в роторе или используют короткозамкнутые обмотки, образующие «беличью клетку».
Разница между синхронным и асинхронным двигателем
Ключевое отличие: Синхронные двигатели и асинхронные двигатели являются наиболее широко используемыми типами двигателей переменного тока. В синхронном электродвигателе вращение вала синхронизировано с частотой питающего тока. Асинхронный двигатель представляет собой электродвигатель переменного тока, в котором электрический ток в роторе создается за счет электромагнитной индукции от магнитного поля обмотки статора.Синхронные и асинхронные двигатели представляют собой два различных типа электродвигателей переменного тока.Электродвигатели переменного тока представляют собой электродвигатели, приводимые в движение переменным током (AC). Двигатель переменного тока обычно состоит из двух основных частей: внешнего неподвижного статора и внутреннего ротора. Синхронные двигатели и асинхронные двигатели являются наиболее широко используемыми типами двигателей переменного тока.
Внешний неподвижный статор имеет катушки, на которые подается переменный ток. Это создает вращающееся магнитное поле. Внутренний ротор прикреплен к выходному валу, который создает второе вращающееся магнитное поле.Магнитное поле ротора может создаваться постоянными магнитами, сопротивлением магнитного поля или электрическими обмотками постоянного или переменного тока.
В синхронном электродвигателе вращение вала синхронизировано с частотой питающего тока. Период вращения точно равен целому числу циклов переменного тока. Синхронные двигатели содержат многофазные электромагниты переменного тока на статоре двигателя. Эти электромагниты создают магнитное поле, которое вращается в такт колебаниям линейного тока.С другой стороны, ротор с постоянными магнитами или электромагнитами вращается в соответствии с полем статора с той же скоростью. Это обеспечивает второе синхронизированное вращающееся магнитное поле.
Асинхронный двигатель представляет собой электродвигатель переменного тока, в котором электрический ток в роторе создается за счет электромагнитной индукции от магнитного поля обмотки статора. Асинхронный двигатель также известен как асинхронный двигатель. Ротор в асинхронном двигателе может быть как с обмоткой, так и с короткозамкнутым ротором.
В отличие от больших синхронных двигателей, асинхронный двигатель не требует механической коммутации, раздельного возбуждения или самовозбуждения для передачи энергии от статора к ротору.
Основное различие между синхронными и асинхронными двигателями заключается в том, что синхронный двигатель вращается точно синхронно с частотой сети. Кроме того, синхронный двигатель не зависит от индукции тока для создания магнитного поля ротора. Асинхронный двигатель, с другой стороны, требует «скольжения», чтобы индуцировать ток в обмотке ротора, что означает, что ротор должен вращаться немного медленнее, чем чередование переменного тока.
Сравнение синхронного и асинхронного двигателя:
| Синхронный двигатель | Асинхронный двигатель |
Описание | Синхронный электродвигатель представляет собой двигатель переменного тока, в котором в установившемся режиме вращение вала синхронизировано с частотой питающего тока. | Асинхронный или асинхронный двигатель представляет собой электродвигатель переменного тока, в котором электрический ток в роторе, необходимый для создания крутящего момента, получается за счет электромагнитной индукции из магнитного поля обмотки статора. |
Содержит | Многофазные электромагниты переменного тока на статоре двигателя |
|
Синхронная скорость | Работа при об/мин=120f/p | Работа на скорости ниже синхронной (об/мин=120f/p – скольжение) |
Возбуждение постоянным током | Синхронные двигатели требуют подачи возбуждения постоянного тока на обмотки ротора | Асинхронные двигатели не требуют подачи возбуждения постоянного тока на обмотки ротора |
Источник питания постоянного тока | Синхронным двигателям требуется источник питания постоянного тока для возбуждения ротора. | Асинхронным двигателям не требуется источник питания постоянного тока для возбуждения ротора. |
Возбуждение ротора | Для синхронных двигателей требуются контактные кольца и щетки для обеспечения возбуждения ротора. | Асинхронные двигатели не требуют токосъемных колец, но некоторые асинхронные двигатели имеют их для плавного пуска или регулирования скорости. |
Обмотки ротора | Для синхронных двигателей требуются обмотки ротора | Асинхронные двигатели чаще всего имеют токопроводящие стержни в роторе, которые закорочены на концах, образуя «беличью клетку». |
Пусковой механизм | Для синхронных двигателей требуется пусковой механизм в дополнение к режиму работы, который действует, когда они достигают синхронной скорости. | Трехфазные асинхронные двигатели можно запустить, просто подав питание, но для однофазных двигателей требуется дополнительная пусковая цепь. |
Коэффициент мощности | Коэффициент мощности синхронного двигателя можно отрегулировать так, чтобы он был отстающим, единичным или опережающим | Асинхронные двигатели всегда должны работать с отстающим коэффициентом мощности. |
Эффективность | Синхронные двигатели, как правило, более эффективны, чем асинхронные двигатели. | Асинхронные двигатели обычно менее эффективны, чем синхронные двигатели. |
Слип | Синхронные двигатели могут быть сконструированы с постоянными магнитами в роторе, исключая контактные кольца, обмотки ротора, систему возбуждения постоянного тока и возможность регулировки коэффициента мощности. | Асинхронные двигатели содержат скольжение. |
Размер | Синхронные двигатели обычно изготавливаются только мощностью более 1000 л.с. (750 кВт) из-за их стоимости и сложности. Однако синхронные двигатели с постоянными магнитами и постоянные синхронные двигатели с электронным управлением, называемые бесщеточными двигателями постоянного тока, доступны в меньших размерах. | Асинхронные двигатели меньшего размера обычно используются в быту. |